Результат интеллектуальной деятельности: СПОСОБ КАРТОГРАФИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ (БРЛС)
Вид РИД
Изобретение
Изобретение относится к области радиолокации, в частности к радиолокационным станциям, устанавливаемым на летательных аппаратах.
Известен способ картографирования земной поверхности бортовой радиолокационной станцией, основанный на излучении и приеме антенной отраженных от земной поверхности сигналов при перемещении луча антенны в заданном секторе углов по азимуту и формировании радиолокационного изображения (РЛИ) поверхности Земли (Многофункциональные радиолокационные системы под ред. Б.Г. Татарского, М., ООО «Дрофа», 2007 г., стр.167-174). Такой способ формирования радиолокационного изображения земной поверхности называется «Картографирование реальным лучом». Данный способ обеспечивает невысокое разрешение по азимуту, которое определяется шириной главного луча диаграммы направленности антенны (ДНА) по азимуту.
Для получения более качественного радиолокационного изображения используют методы Доплеровского обужения луча (ДОЛ) или фокусированной синтезированной апертуры (ФСА) антенны. Эти методы позволяют получить РЛИ с разрешением на порядки выше, используя зависимость доплеровского смещения частоты отраженного сигнала от углового положения отражающего элемента поверхности, что обеспечивает разделение целей, попадающих в один луч ДНА (Многофункциональные радиолокационные системы под ред. Б.Г. Татарского, М., ООО «Дрофа», 2007 г., стр.174-195). Однако синтезирование апертуры антенны в зоне углов ±10° в горизонтальной плоскости (по азимуту) относительно вектора скорости летательного аппарата известными методами представляется невозможным ввиду уплотнения спектра сигнала, усложняющего условия синтезирования апертуры антенны, а также наложения «зеркальных» спектральных составляющих. Эти факторы не позволяют с помощью традиционного радиолокатора с синтезированной апертурой (РСА) получить необходимой разрешающей способности в переднем секторе для решения задач навигации и целеуказания.
Наиболее близким по технической сущности к предлагаемому является «Способ картографирования земной поверхности бортовой радиолокационной станцией» (RU 2423724 C1 опубл. 10.07.2011 МПК G01S 13/89). Он основан на излучении и приеме антенной отраженных от земной поверхности сигналов при перемещении луча антенны в заданном секторе углов по азимуту, синтезировании апертуры антенны и формировании радиолокационного изображения поверхности Земли, причем перемещение луча антенны от границы заданного сектора углов по азимуту осуществляется при изменении курса летательного аппарата от начального значения Ф0 с соблюдением определенных условий, а при достижении углового положения луча антенны значения ≥Ф0 осуществляется его мгновенный переброс в азимутальной плоскости до другой границы заданного сектора, после чего продолжается перемещение луча антенны по азимуту в противоположном направлении с изменением курса летательного аппарата до исходного значения Ф0.
Недостатками известных способов являются создание дополнительной нагрузки на летчика, либо введения в пилотажный комплекс самолета соответствующих алгоритмов движения. Так же при формировании РЛИ требуется мгновенная переброска луча ДНА с одного края сектора на другой, что можно реализовать только антенной с электронным управлением лучом.
Технический результат заключается в том, что заявляемый способ картографирования земной поверхности бортовой радиолокационной станцией предлагает получение повышенного разрешения исключительно за счет обработки сигнала, не требуя дополнительных маневров, и может быть реализован в БРЛС как с механическими, так и электронными антенными системами.
Сущность предлагаемого способа картографирования земной поверхности бортовой радиолокационной станцией (БРЛС) заключается в том, что он основан на излучении сигналов, приеме антенной отраженных от земной поверхности сигналов и их накоплении при перемещении луча антенны в переднем секторе углов по азимуту, синтезировании апертуры антенны и формировании радиолокационного изображения.
Новым в предлагаемом способе является то, что излучение и прием отраженного сигнала во всем секторе обзора осуществляется когерентно при сканировании луча вблизи нулевого ракурса, когда реальный луч, плавно перемещаясь, охватывает весь передний сектор, при этом создавая за счет сканирования дополнительное расширение спектра принимаемого сигнала. Затем осуществляют определение фазового набега за период повторения принятого когерентного радиолокационного сигнала, компенсацию фазового набега, формирование двух сигналов из скомпенсированного по фазе сигнала с разными знаками крутизны частотной модуляции, выделение сигнала с положительной и отрицательной крутизнами, соответствующим сигналам, принятым справа и слева относительно направления движения летательного аппарата, пропорциональными азимутальному направлению сигнала, спектральный анализ полученных сигналов, объединение полученных изображений из двух сигналов в одно радиолокационное изображение.
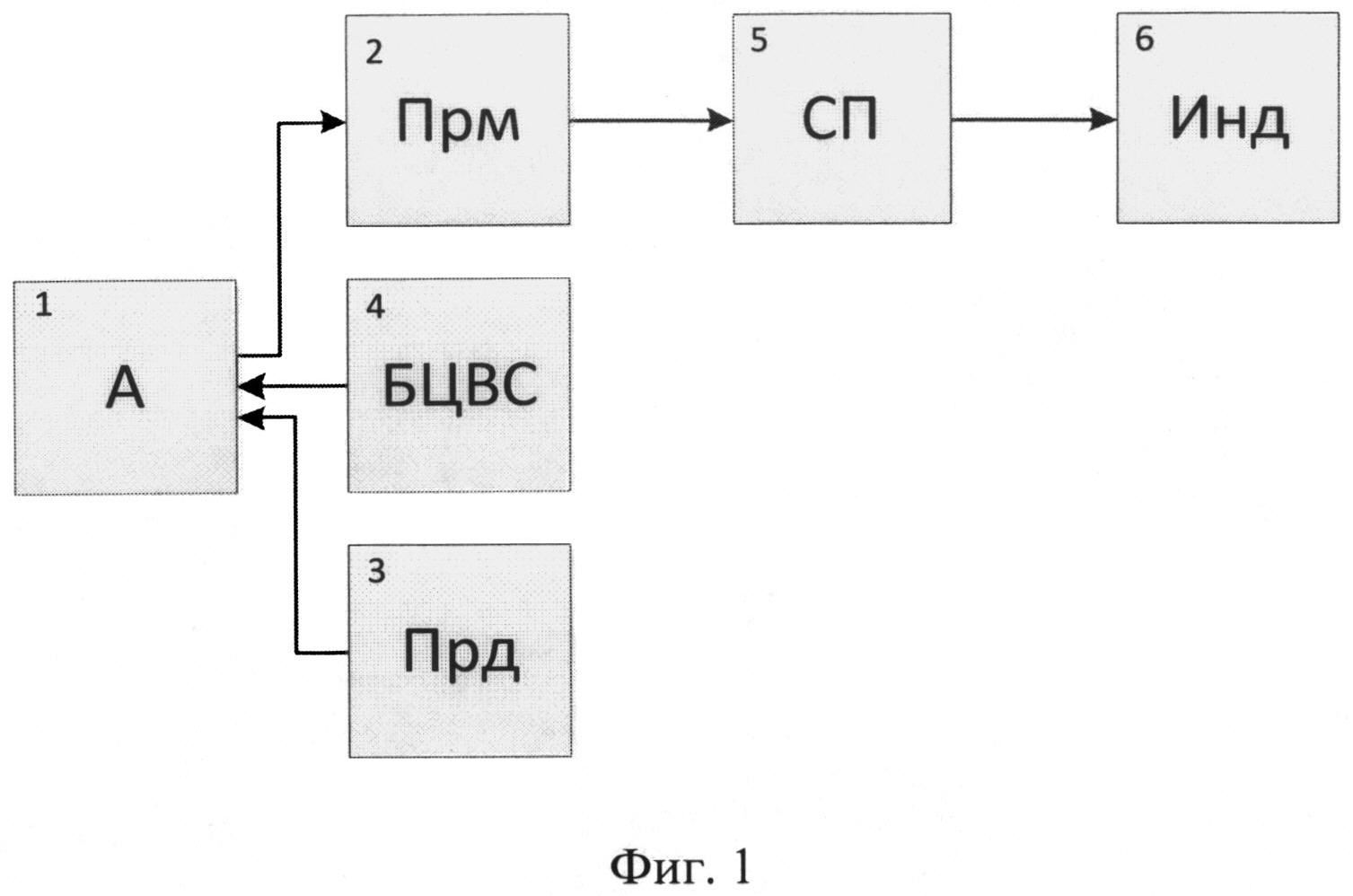
На фиг.1 изображена структурная схема бортовой радиолокационной станции (БРЛС), реализующей предлагаемый способ.
На фиг.2 изображена зона обзора, построенная относительно направления движения носителя α=0°, начиная от крайне правого положения  , до левого положения
, до левого положения  , с постоянной скоростью сканирования wск, a также представлена приближенная геометрическая схема, поясняющая основные физические процессы, происходящие при переднебоковом обзоре со сканированием лучом реальной антенны.
, с постоянной скоростью сканирования wск, a также представлена приближенная геометрическая схема, поясняющая основные физические процессы, происходящие при переднебоковом обзоре со сканированием лучом реальной антенны.
Способ картографирования может быть реализован с помощью БРЛС (фиг.1), состоящей из антенны 1, выход которой соединен с приемником 2, а вход с передатчиком 3, бортовой цифровой вычислительной системы (БЦВС) 4, управляющий выход которой соединен с антенной 1, сигнального процессора (СП) 5, соединенного по входу с приемником 2 и по выходу с индикатором 6.
Режим картографирования запускается соответствующей командой из БЦВС 4. Луч диаграммы направленности (ДНА) выставляется антенной 1 на правую границу зоны обзора. После установки луч ДНА начинает перемещаться в азимутальной плоскости, проводя обзор зоны по азимуту. Определение положения зоны обзора осуществляется по информации, получаемой из навигационной системы самолета носителя. В угломестной набега, формирование двух сигналов из скомпенсированного по фазе сигнала с разными знаками крутизны частотной модуляции, выделение сигнала с положительной и отрицательной крутизнами, соответствующим сигналам, принятым справа и слева относительно направления движения летательного аппарата, пропорциональными азимутальному направлению сигнала, спектральный анализ полученных сигналов, объединение полученных изображений из двух сигналов в одно радиолокационное изображение.
На фиг.1 изображена структурная схема бортовой радиолокационной станции (БРЛС), реализующей предлагаемый способ.
На фиг.2 изображена зона обзора, построенная относительно направления движения носителя α=0°, начиная от крайне правого положения  , до левого положения
, до левого положения  , с постоянной скоростью сканирования wск, a также представлена приближенная геометрическая схема, поясняющая основные физические процессы, происходящие при переднебоковом обзоре со сканированием лучом реальной антенны.
, с постоянной скоростью сканирования wск, a также представлена приближенная геометрическая схема, поясняющая основные физические процессы, происходящие при переднебоковом обзоре со сканированием лучом реальной антенны.
Способ картографирования может быть реализован с помощью БРЛС (фиг.1), состоящей из антенны 1, выход которой соединен с приемником 2, а вход - с передатчиком 3, бортовой цифровой вычислительной системы (БЦВС) 4, управляющий выход которой соединен с антенной 1, сигнального процессора (СП) 5, соединенного по входу с приемником 2 и по выходу с индикатором 6.
Режим картографирования запускается соответствующей командой из БЦВС 4. Луч диаграммы направленности (ДНА) выставляется антенной 1 на правую границу зоны обзора. После установки луч ДНА начинает перемещаться в азимутальной плоскости, проводя обзор зоны по азимуту. Определение положения зоны обзора осуществляется по информации, получаемой из навигационной системы самолета носителя. В угломестной плоскости устанавливают положение зоны обзора по дальности в процессе полета. Антенна 1 излучает сформированный передатчиком 3 когерентный радиолокационный сигнал (простые радиоимпульсы, фазокодоманипулированные (ФКМ) или линейно частотно модулированные (ЛЧМ) сигналы) с периодом повторения, обеспечивающим перекрытие доплеровского диапазона частот, попадающих в зону обзора, и однозначное перекрытие зоны по дальности, например для зоны обзора с параметрами: дальность центра зоны обзора (ЦЗО) 50 км, азимут ЦЗО α=0°, размер по дальности 20 км, размер по азимуту Δα=20°, период повторения составляет TP=0.5 мс (фиг.2). Отраженный от земной поверхности сигнал принимается антенной 1, обрабатывается в приемнике 2 и накапливается в сигнальном процессоре 4. Процесс излучения/приема радиолокационного сигнала осуществляется в ходе сканирования ДНА земной поверхности в заданном секторе обзора по закону, заданному вычислительной системой 6. По завершении сканирования с накоплением в сигнальном процессоре 5 запускается обработка радиолокационного сигнала. В ходе сигнальной обработки осуществляется оценка и компенсация фазового набега за период повторения принятого когерентного радиолокационного сигнала, приводящая к компенсации нестабильности приемного тракта и доплеровского сдвига частоты сигнала. Затем формируются два сигнала с разными знаками крутизны частотной модуляции. Определяются знак и величина крутизны, определяемые азимутальным направлением облучения и приема. Положительной крутизной выделяется сигнал, накопленный справа относительно направления движения летального аппарата, с отрицательной крутизной - слева. Далее проводится спектральный анализ полученных сигналов. Полученные спектральным анализом изображения левой и правой половин объединяются в одно радиолокационное изображение. РЛИ, сформированное в СП 5, выводится на индикатор 6 для демонстрации летчику или оператору.
Применение когерентной обработки радиолокационного сигнала, накопленного при сканировании антенной в переднем секторе с разделением сигналов слева и справа относительно направления движения летательного аппарата, позволяет сформировать РЛИ с высоким разрешением по азимуту, что дает возможность повысить точность определения координат наземных объектов, нежели в режимах «Картографирования реальным лучом».
Способ картографирования земной поверхности бортовой радиолокационной станцией (БРЛС), основанный на излучении сигналов, приеме антенной отраженных от земной поверхности сигналов и их накоплении при перемещении луча антенны в переднем секторе углов по азимуту, синтезировании апертуры антенны и формировании радиолокационного изображения, отличающийся тем, что излучение и прием отраженного сигнала во всем секторе обзора осуществляется когерентно при сканировании луча вблизи нулевого ракурса, когда реальный луч, плавно перемещаясь, охватывает весь передний сектор, при этом создавая за счет сканирования дополнительное расширение спектра принимаемого сигнала, затем осуществляют определение фазового набега за период повторения принятого когерентного радиолокационного сигнала, компенсации фазового набега, формирование двух сигналов из скомпенсированного сигнала с разными знаками крутизны частотной модуляции, выделение сигнала с положительной и отрицательной крутизнами, соответствующим сигналам, принятым справа и слева относительно направления движения летательного аппарата, величины которых пропорциональны азимутальному направлению луча, спектральный анализ полученных сигналов, объединение полученных изображений из двух сигналов в одно радиолокационное изображение.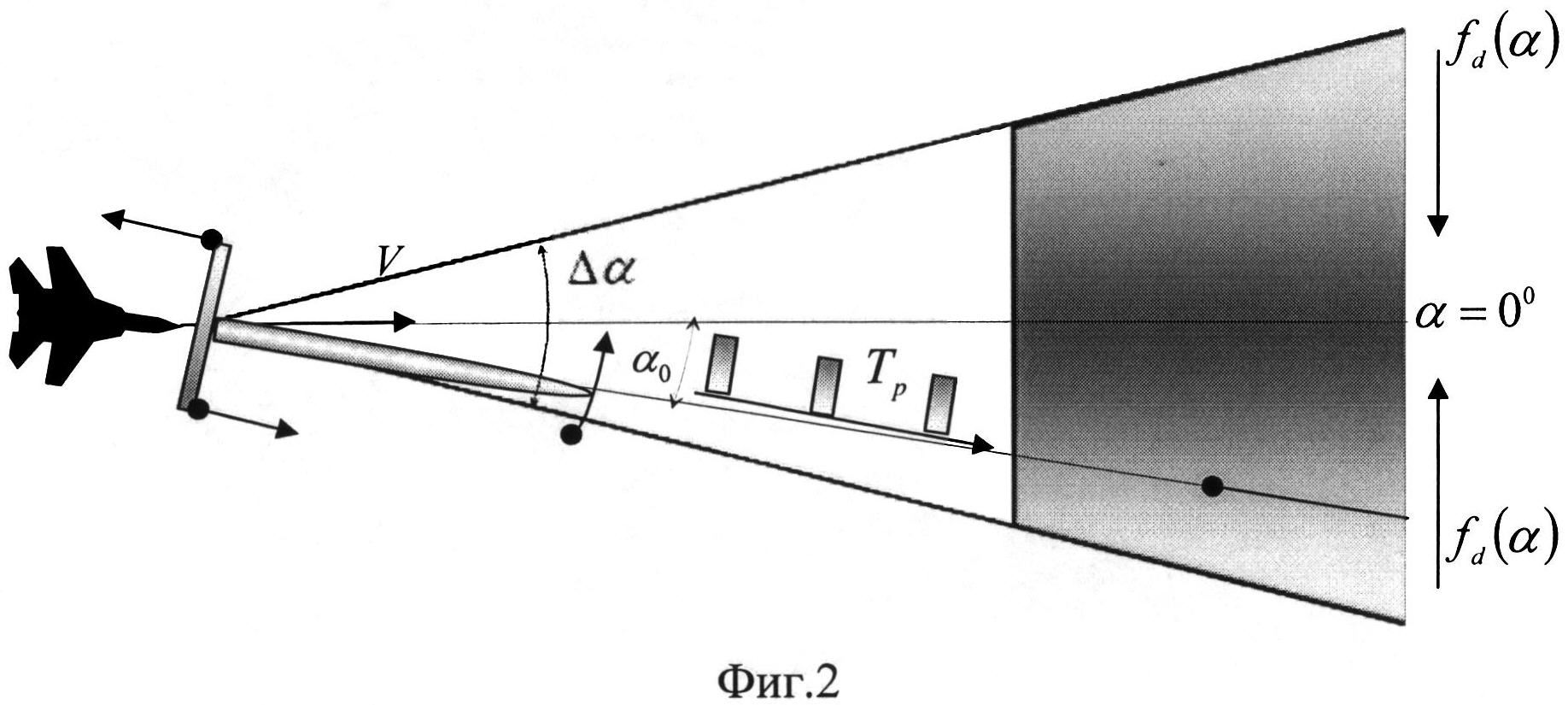
Волноводная нагрузка
Многоканальный делитель мощности
Устройство наземного контроля радиолокационной системы управления
Способ обнаружения вертолетов бортовой радиолокационной станцией
Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией
Способ определения высоты рельефа местности радиолокатором с синтезированной апертурой антенны
Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией

