Результат интеллектуальной деятельности: ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ
Вид РИД
Изобретение
Изобретение относится к измерительной технике, а именно к средствам измерения линейных ускорений в системах управления движущимися объектами, например к средствам измерения линейного ускорения в бесплатформенных инерциальных навигационных системах управления космическими объектами.
Кварцевые маятниковые акселерометры, используемые в системах управления, обычно компонуются в блоки измерителей линейного ускорения, которые содержат «n» измерительных каналов (n=1, 3, 4, 5, 6). Все каналы имеют одинаковую структуру. Каждый измерительный канал содержит кварцевый маятниковый акселерометр, вторичный источник питания и блок преобразования аналоговой выходной информации акселерометра по току обратной связи или напряжению в цифровую форму - код, для чего могут использоваться либо аналого-цифровой преобразователь, либо преобразователь «напряжение-частота» (ПНЧ) или «ток-частота» (ПТЧ), либо широтно-импульсный модулятор (ШИМ), либо преобразователи, построенные на ПЛИС и процессоре. Большое распространение получили преобразователи «напряжение-частота» - ПНЧ.
Проблемой является существенная зависимость от температуры основных технических характеристик кварцевых маятниковых акселерометров, а именно масштабного коэффициента и смещения нуля, что определяет и температурную зависимость тех же параметров измерителей линейного ускорения, имеющих в качестве чувствительных элементов кварцевые маятниковые акселерометры. Дополнительная сложность решения задачи снижения влияния температуры на параметры измерителей линейного ускорения, а в идеальном варианте, задача обеспечения термоинвариантности масштабного коэффициента и смещения нуля измерителей линейного ускорения состоит в том, что указанные зависимости носят существенно нелинейный характер.
Для снижения влияния температуры на параметры измерителя линейного ускорения используют следующие технические решения:
- термостатирование измерителя;
- алгоритмическую компенсацию температурной погрешности масштабного коэффициента и смещения нуля.
Известна конструкция измерителя линейного ускорения с кварцевым маятниковым акселерометром компенсационного измерения, рассматриваемая в качестве аналога. Это измеритель линейного ускорения, широко описанный в литературе, - С.Ф.Коновалов и др., «Гироскопические системы», М.: Высшая школа, 1980, стр.31.
Выходное напряжение акселерометра подается на емкость, выполняющую роль интегратора; заряд, накапливающийся на емкости, компенсируется импульсами нормированного тока, проходящими в момент открытия ключа.
В схеме осуществляется формирование выходных импульсов, частота следования которых пропорциональна напряжению на аналоговом выходе акселерометра, т.е. измеряемому линейному ускорению. Для обеспечения точностных характеристик выполняется термостатирование акселерометра. Недостатки аналога - большое время готовности, большое энергопотребление.
Известна конструкция прибора БИПС-М, принятого за аналог. Прибор разработан предприятием ОАО РКК «Энергия» и эксплуатируется в системе управления транспортного корабля «Прогресс-М». Прибор БИПС-М содержит пять измерителей линейного ускорения - кварцевых маятниковых акселерометров АК-6. Компенсация температурных погрешностей акселерометров в приборе БИПС-М отсутствует. Однако алгоритмическая компенсация температурных погрешностей смещения нуля реализована следующим образом: фактические значения смещений нуля каждого из пяти акселерометров измеряются на орбите в процессе эксплуатации прибора и вносятся в виде поправок в бортовой вычислитель.
Недостатком такого технического решения является загрузка бортового вычислителя решением задачи, которая должна автономно решаться в приборе.
В качестве прототипа принят измеритель линейного ускорения на базе кварцевого маятникового акселерометра компенсационного измерения (с аналоговой электрической обратной связью) с магнитоэлектрическим датчиком момента и преобразователем «напряжение-частота», который описан в книге В.Я.Распопов, «Микромеханические приборы», М.: Машиностроение, 2007 г., стр.28-29, 196, 335.
В прототип входит кварцевый маятниковый акселерометр компенсационного измерения, преобразователь «напряжение-частота», система компенсации температурных погрешностей акселерометра путем его термостатирования. Прототип обладает недостатками, характерными для конструкций измерителей, использующих систему термостатирования - большое время готовности, большое энергопотребление.
Задачей изобретения является обеспечение термоинвариантности масштабного коэффициента и смещения нуля измерителя линейного ускорения.
Технический результат достигается тем, что в термоинвариантный измеритель линейного ускорения, содержащий кварцевый компенсационный маятниковый акселерометр, преобразователь напряжения в частоту, входом связанный с выходом акселерометра, термосистему, содержащую первую мостовую схему резисторов, в одно из плеч которой включен первый термодатчик, усилитель мощности, вход которого соединен с выходом первой мостовой схемы, а выход соединен с катушкой обогрева, охватывающей корпус акселерометра, причем первый термодатчик установлен между катушкой и корпусом акселерометра, а входная диагональ первой мостовой схемы подключена к источнику вторичного питания, при этом преобразователь напряжение-частота содержит нагрузочный резистор, который подключен к выходу усилителя обратной связи, генератор синхрочастоты, интегратор, резистор заряда Rзар, две симметричные цепи преобразования положительной и отрицательной информации, каждая из цепей содержит соединенные последовательно в каждой цепи преобразования эталонный источник напряжения, компаратор, резистор разряда Rразр, переключающее устройство, содержащее электронный ключ, триггер, счетчик тактовых импульсов, и формирователь импульсной выходной информации; при этом Rзар соединен через нагрузочный резистор Roc с выходом усилителя обратной связи и с входом интегратора, выход интегратора соединен с первым входом каждого из компараторов, второй вход каждого компаратора соединен с первым выходом соответствующего эталонного источника напряжения, второй выход эталонного источника напряжения через соответствующие резисторы Rразр соединен с первым входом соответствующего ключа, выход ключа соединен с входом интегратора, выход компаратора соединен с первым входом триггера, второй вход триггера и первый вход счетчика соединены с выходом генератора синхрочастоты, третий вход триггера соединен с выходом соответствующего счетчика, первый выход триггера соединен со вторым входом соответствующего ключа, второй выход триггера соединен со вторым входом счетчика, выход счетчика соединен с входом соответствующего формирователя и с третьим входом соответствующего триггера, введена система аппаратной компенсации температурных погрешностей, содержащая вторую мостовую схему резисторов со вторым термодатчиком, установленным внутри корпуса акселерометра, измерительный усилитель, инвертор и четыре резистора R1-4, выход второй мостовой схемы соединен с входом измерительного усилителя, при этом резистор R1 соединен первым выводом с первым выходом измерительного усилителя, резистор R2 соединен первым выводом через первый канал инвертора со вторым выходом измерительного усилителя, вторые выводы резисторов R1 и R2 соединены с информационными входами ключей, соответственно, положительной и отрицательной цепей преобразователя; резистор R3 первым выводом соединен с третьим выходом измерительного усилителя, резистор R4 первым выводом через второй канал инвертора соединен с четвертым выходом измерительного усилителя, вторые выводы резисторов R3 и R4 соединены с входом интегратора преобразователя.
На Рис.1 представлена известная конструктивная схема чувствительного элемента кварцевого маятникового акселерометра компенсационного измерения,
на Рис.2 - конструктивная схема акселерометра,
на Рис.3 - структурная схема термоинвариантного измерителя линейного ускорения, построенного на кварцевом маятниковом акселерометре компенсационного измерения и преобразователе «напряжение-частота»,
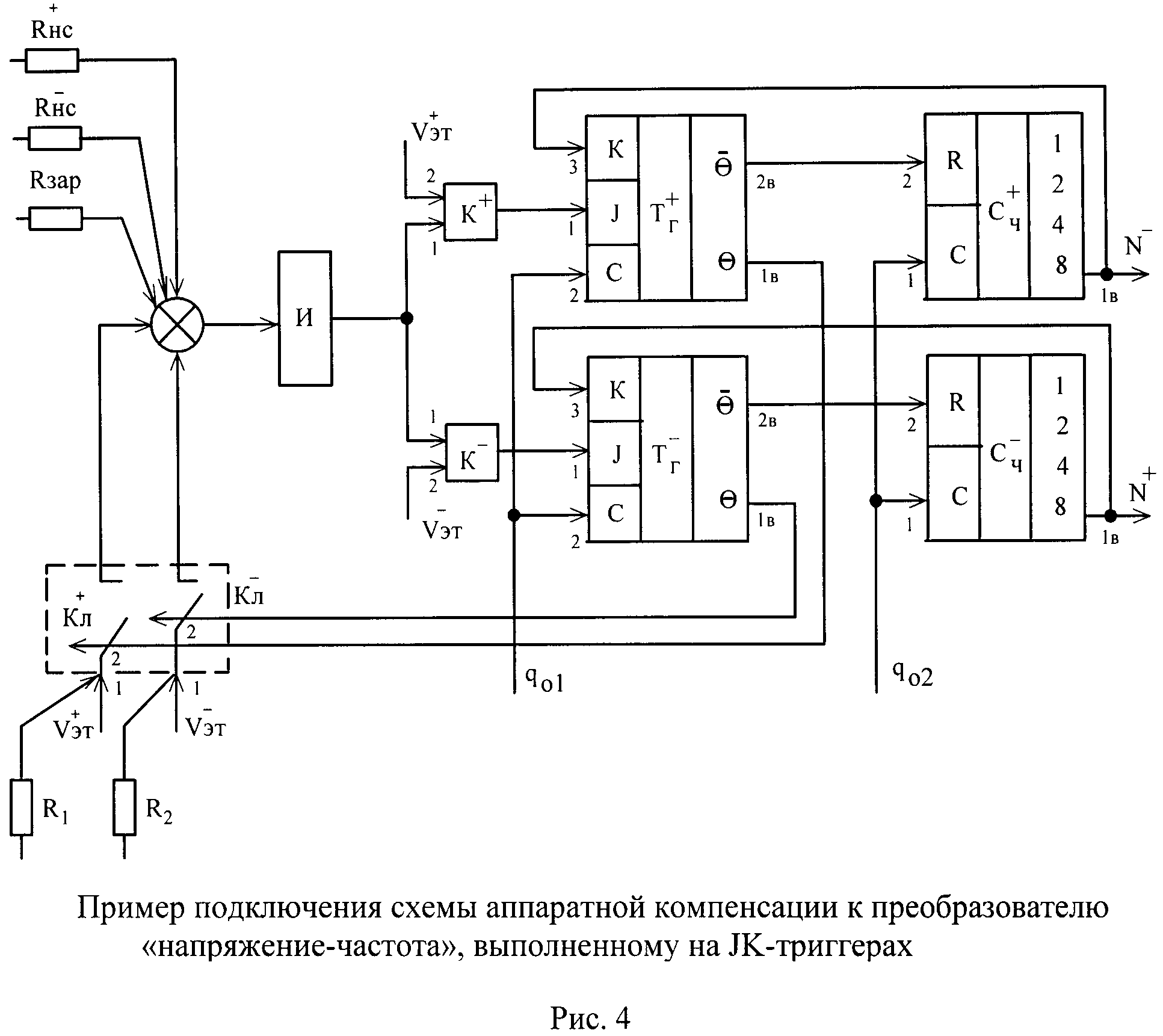
на Рис.4 - пример подключения схемы аппаратной компенсации к преобразователю «напряжение-частота», выполненному на J-K триггерах,
на Рис.5 - типовая схема усилителя обратной связи,
на Рис.6 - типичная зависимость от температуры масштабного коэффициента и смещения нуля кварцевого маятникового акселерометра компенсационного измерения.
Термоинвариантный измеритель линейного ускорения имеет следующую конструкцию.
Чувствительный элемент кварцевого маятникового акселерометра (Рис.1) содержит кварцевую пластину 1, имеющую маятниковость ml, образованную смещением центра масс «m» относительно оси торсиона 2 на плечо «l», емкостной датчик угла, магнитоэлектрический датчик момента, две катушки 3 которого закреплены на двух сторонах кварцевой пластины 1 и входят в соосно расположенные магниты 4, закрепленные на двух полукорпусах 5, 6. Полукорпуса 5, 6 прижаты друг к другу фиксированным усилием, и это состояние зафиксировано точечной сваркой с кольцом 7. Между полукорпусами 5, 6 зажата кварцевая пластина 1, причем емкостной датчик угла, включенный по мостовой схеме (Рис.3), образован двумя полукорпусами 5, 6 (Рис.1) и пластиной 1, на которой нанесено напыление золотом. Термодатчик 8 закреплен внутри корпуса 6 акселерометра. Усилитель обратной связи 9 (Рис.2) закреплен в корпусе 10 акселерометра вместе с чувствительным элементом 11 акселерометра (корпус чувствительного элемента акселерометра - это полукорпуса 5, 6, сжатые кольцом 7). На корпус 10 акселерометра установлен по плотной посадке тонкостенный стакан 12, к которому прикреплена катушка-обогреватель 13. Цилиндрический зазор между наружным диаметром стакана 12 и внутренним диаметром катушки 13 образует термооболочку, в этом зазоре размещен термодатчик 14 термосистемы, прикрепленный к стакану 12. На стакане 12 над катушкой 13 закреплена плата 15, на которой выполнены мостовая схема 16 и усилитель мощности 17 термосистема 18. (Рис.3)
Усилитель обратной связи 9 (Рис.5), как правило, содержит предварительный усилитель 19, фазочувствительный выпрямитель20, корректирующий контур 21 и усилитель мощности 22, при этом вход усилителя обратной связи соединен с емкостным датчиком угла, а выход - с катушками датчика момента, нагрузочный резистор Roc подключен к выходу усилителя обратной связи.
Структурная схема термоинвариантного измерителя линейного ускорения с кварцевым маятниковым акселерометром компенсационного измерения в качестве чувствительного элемента и преобразователем «напряжение-частота» представлена на Рис.3.
В прибор входит: акселерометр, вторичный источник питания 23, преобразователь «напряжение-частота» 24, термосистемы 18 и система аппаратной компенсации 25 температурных погрешностей смещения нуля и масштабного коэффициента акселерометра. Конструкция акселерометра с входящими в его состав чувствительным элементом 11, усилителем обратной связи 9, термодатчиком 8 (ТДск) системы аппаратной компенсации 25, катушкой - обогревателем 13 и термодатчиком 14, термосистема 18 рассмотрена выше.
Вторичный источник питания 23 формирует из бортового напряжения 27+4 -3 В всю совокупность напряжений для питания всех блоков измерительного канала.
Преобразователь «напряжение-частота» 24 содержит генератор синхрочастоты 26, интегратор 27, выполненный на операционном усилителе, резистор заряда Rзар, две симметричные цепи преобразования положительной и отрицательной информации, каждая из цепей содержит соединенные последовательно в каждой цепи преобразования эталонный источник напряжения V+, V-28, компаратор K+, К-29, имеющий два входа и один выход, резистор разряда  ,
,  , электронный ключ Кл+, Кл-30, имеющий два входа и один выход, триггер Тг +, Тг -31, имеющий три входа и два выхода, счетчик тактовых импульсов Cu+, Cu-32, имеющий два входа и один выход, формирователь импульсной выходной информации N+, N-33, при этом резистор Rзap соединен через нагрузочный резистор Roc с выходом усилителя обратной связи 9 и напрямую с входом интегратора 27, выход интегратора 27 соединен с первым входом каждого из компараторов К+, К-29, второй вход каждого компаратора K+, К- соединен с первым выходом соответствующего эталонного источника напряжения V+ эт, V- эт, второй выход эталонного источника напряжения V+ эт, V- эт через резисторы, соответственно,
, электронный ключ Кл+, Кл-30, имеющий два входа и один выход, триггер Тг +, Тг -31, имеющий три входа и два выхода, счетчик тактовых импульсов Cu+, Cu-32, имеющий два входа и один выход, формирователь импульсной выходной информации N+, N-33, при этом резистор Rзap соединен через нагрузочный резистор Roc с выходом усилителя обратной связи 9 и напрямую с входом интегратора 27, выход интегратора 27 соединен с первым входом каждого из компараторов К+, К-29, второй вход каждого компаратора K+, К- соединен с первым выходом соответствующего эталонного источника напряжения V+ эт, V- эт, второй выход эталонного источника напряжения V+ эт, V- эт через резисторы, соответственно,  ,
соединен с первым входом соответствующего электронного ключа Кл+, Кл-30, выход электронного ключа соединен с входом интегратора, выход компаратора K+, К- соединен первым входом триггера Тг +, Тг -31, второй вход триггера Тг +, Тг - и первый вход счетчика импульсов Cu+, Cu-32 соединены с выходом генератора синхрочастоты 26, третий вход триггера Тг +, Тг - соединен с выходом соответствующего счетчика импульсов Cu+, Cu-, первый выход триггера соединен со вторым входом соответствующего ключа Кл+, Кл-, второй выход триггера соединен со вторым входом счетчика Cu+, Cu-,выход счетчика соединен с входом соответствующего формирователя импульсной выходной информации 33 и с третьим входом соответствующего триггера 31.
,
соединен с первым входом соответствующего электронного ключа Кл+, Кл-30, выход электронного ключа соединен с входом интегратора, выход компаратора K+, К- соединен первым входом триггера Тг +, Тг -31, второй вход триггера Тг +, Тг - и первый вход счетчика импульсов Cu+, Cu-32 соединены с выходом генератора синхрочастоты 26, третий вход триггера Тг +, Тг - соединен с выходом соответствующего счетчика импульсов Cu+, Cu-, первый выход триггера соединен со вторым входом соответствующего ключа Кл+, Кл-, второй выход триггера соединен со вторым входом счетчика Cu+, Cu-,выход счетчика соединен с входом соответствующего формирователя импульсной выходной информации 33 и с третьим входом соответствующего триггера 31.
Термосистема 18 акселерометра содержит обогреватель акселерометра, выполненный в виде катушки 13, охватывающей корпус акселерометра и образующей термооболочку, термодатчик 14 (ТДтс) термосистемы, закрепленный внутри термооболочки, усилитель системы обогрева, мостовую схему 16, в плечо которой включен термодатчик 14 термосистемы, и усилитель мощности 17, выход которого подключен к катушке 13 (обогревателю) акселерометра. В мостовой схеме 16 номиналы резисторов Rтс 1, Rтс 2, Rтс 3 трех плеч моста и терморезистора 14 Rтс тд выбраны так, чтобы при температуре Т0, равной температуре начала линейной части кривой зависимости от температуры масштабного коэффициента и смещения нуля кварцевого маятникового акселерометра, напряжение, снимаемое с диагонали моста 16, равнялось нулю, т.е. происходило автоматическое выключение обогревателя. Система аппаратной компенсации 25 температурных погрешностей смещения нуля и масштабного коэффициента акселерометра содержит мостовую схему 34, измерительный усилитель 35 и инвертор 36 и четыре резистора R1, R2, R3, R4.
Плечами мостовой схемы 34 являются три резистора Rск 1, Rск 2, Rск 3 и термодатчик ТДск, имеющий сопротивление Rск, установленный внутри корпуса акселерометра.
Диагональ мостовой схемы 34 соединена входом измерительного усилителя, который имеет четыре выхода. Резистор R1 при регулировании прибора подключается первым выводом к первому выходу, резистор R2 подключается первым выводом через первый канал инвертора ко второму выходу измерительного усилителя, второй вывод резистора, устанавливаемого в положительную и в отрицательную ветвь схемы, подключается к входу соответствующего электронного ключа Кл+, Кл- преобразователя «напряжение-частота» 24. Номиналы резисторов выбираются из соотношения
R1=R+ разр(T0)·γкм·(Tmax-T0),
R2=R- разр(T0)·γкм·(Tmax-T0).
Резистор R3 подключается первым выводом к третьему выходу измерительного усилителя, а вторым выводом к входу интегратора, если нужно ввести положительное напряжение компенсации. Если нужно ввести отрицательное напряжение компенсации, то резистор R4 подключается первым выводом через второй канал инвертора к четвертому выходу измерительного усилителя, а второй вывод резистора подключается к входу интегратора преобразователя. Номиналы резисторов выбираются из соотношения
R3=R+ разр(T0)·γнс·(Tmax-T0)
R4=R- разр(T0)·γнс·(Tmax-T0),
где R+ разр(T0), R- разр(T0) - сопротивления резисторов разряда преобразователя «напряжение-частота» в цепях преобразования положительной и отрицательной информации - при температуре Т0, равной температуре начала линейной части кривой зависимости от температуры масштабного коэффициента и смещения нуля кварцевого маятникового акселерометра,
γкм - температурный коэффициент масштабного коэффициента кварцевого маятникового акселерометра, записываемый в формуляр при изготовлении акселерометра, для разных образцов акселерометра одного и того же конструктивного исполнения этот коэффициент имеет разное значение в определенном диапазоне изменения,
γнс - температурный коэффициент смещения нуля кварцевого маятникового акселерометра, записываемый в формуляр при изготовлении акселерометра. Для разных образцов акселерометра одного и того же конструктивного исполнения эти коэффициенты имеют разное значение в определенном диапазоне изменения,
Тmax - максимальная температура в корпусе акселерометра, превышающая температуру окружающей среды, заданную для измерителя линейного ускорения, за счет тепловыделений в приборе, и принадлежащая линейному участку зависимости масштабного коэффициента и смещения нуля от температуры.
Термоинвариантный блок измерителей линейного ускорения работает следующим образом.
На предприятии-изготовителе выполняют следующую настройку термоинвариантного измерителя линейного ускорения.
1. Разогревают внутреннюю полость термооболочки, в которую установлен кварцевый маятниковый акселерометр, до температуры Т0, равной температуре начала линейной части кривой зависимости от температуры масштабного коэффициента и смещения нуля кварцевого маятникового акселерометра.
2. При достижении внутри термооболочки температуры Т0,, необходимой для работы системы аппаратной компенсации, выполняют операции, которые можно назвать операциями обеспечения исходного состояния системы аппаратной компенсации, т.е. при температуре Т0 регулировкой обеспечивают величину смещения нуля каждого акселерометра, равную нулю, и выставляют значение масштабного коэффициента, равное заданному по техническому заданию на измеритель.
Нулевое значение смещения нуля акселерометра обеспечивают установкой резисторов в цепь обратной связи акселерометра (резисторы не показаны на Фиг.3 в силу простоты технического решения).
Для обеспечения заданного значения масштабного коэффициента нужно, чтобы значение частоты следования информационных импульсов с выхода преобразователя «напряжение-частота» измерителя, соответствующее действию ускорения 1g, при температуре Т0 было равно этому заданному значению (это и есть значение масштабного коэффициента измерителя линейного ускорения, задаваемое в угл. сек на один импульс унитарного кода). Достигается это за счет выбора резисторов разряда Rразр, заряда Rзар и обратной связи Roc преобразователя «напряжение-частота».
Частота F следования импульсов N+, N- на выходе преобразователя «напряжение-частота», т.е. на выходе измерителя линейного ускорения выражается формулой, характеризующей закон работы преобразователя «напряжение-частота»

где F - частота выходной информации, q=ng -измеряемое линейное ускорение, при настройке прибора в земных условиях q=lg, ml - маятниковость акселерометра, Кдм - крутизна характеристики датчика момента акселерометра, Uсм - смещение нуля акселерометра (напряжение).
Из формулы (1) видно, что эту операцию можно выполнить, подбирая резисторы разряда Rразр, заряда Rзар и обратной связи Roc преобразователя «напряжение-частота». Таким образом, в исходном состоянии до начала аппаратной компенсации обеспечивают равенство нулю Uсм - смещение нуля акселерометра и величину F - частоты выходной информации при q=lg, соответствующую заданной по техническому заданию величине, что определяет масштабный коэффициент акселерометра.
3. Обеспечивают автоматическое выключение обогрева термооболочки при достижении в ней температуры Т0 и повторное автоматическое включение при любом снижении температуры ниже Т0, что обеспечивают выбором резисторов Rтс 1, Rтс 2, Rтс 3 в мостовой схеме 16 термосистемы акселерометра, в плечо которой включен термодатчик Rтд тс термосистемы. Выбор сделан так, чтобы напряжение с выходной диагонали упомянутой мостовой схемы, управляющее обогревом, было равно нулю при температуре Т0. Если температура внутри термооболочки становится меньше Т0, то мост разбалансируется и обогрев включается. Эта операция выполняется автоматически. Поскольку сопротивления резисторов Rтс 1, Rтс 2, Rтс 3, включая сопротивление терморезистора Rтд тс, имеют линейный характер зависимости от температуры, то напряжение на выходе моста также имеет линейную зависимость от температуры внутри термооболочки акселерометра. При изменении температуры окружающей среды в заданном для прибора диапазоне температура в термооболочке не может снизиться ниже значения Т0.
Таким образом, операция автоматического включения и выключения обогрева обеспечивает внутри термооболочки температуру, принадлежащую линейному участку кривых зависимости масштабного коэффициента и смещения нуля акселерометра от температуры.
Температура в полости термооболочки не снижается ниже температуры Т0, что необходимо для того, чтобы система аппаратной компенсации могла быть реализована путем введения поправок на линейном участке кривых температурной зависимости масштабного коэффициента и смещения нуля.
4. С помощью введенной в прибор системы аппаратной компенсации температурных погрешностей смещения нуля и масштабного коэффициента формируют равных по величине четыре тока, пропорциональных изменению температуры внутри корпуса акселерометра, при этом два тока имеют один знак, а два тока - противоположный.
Входящие в состав системы аппаратной компенсации измерительный усилитель 35 формирует необходимую величину тока, а инвертор 36 позволяет изменить знак тока.
5. С помощью системы аппаратной компенсации формируют четыре напряжения компенсации путем пропускания тока, пропорционального изменению температуры внутри корпуса акселерометра, через систему резисторов, входящих в систему аппаратной компенсации, величину которых выбирают в зависимости от определенных при температуре Т0 значений сопротивлений резисторов разряда R+ разр(T0), R- разр(T0), установленных в положительную (R+ разр(T0)) и отрицательную (R- разр(T0)) цепь преобразователя «напряжение-частота» прибора, и температурных коэффициентов масштабного коэффициента и смещения нуля каждого кварцевого маятникового акселерометра, при этом рассчитывают значения резисторов системы аппаратной компенсации по формулам
R1=R+ разр(T0)·γкм·(Tmax-T0),
R2=R- разр(T0)·γкм·(Tmax-T0),
R3=R+ разр(T0)·γнс·(Tmax-T0)
R4=R- разр(T0)·γнс·(Tmax-T0), где
R+ разр(T0), R- разр(T0) - сопротивления резисторов разряда преобразователя «напряжение-частота» в цепях преобразования положительной и отрицательной информации - при температуре Т0, равной температуре начала линейной части кривой зависимости от температуры масштабного коэффициента и смещения нуля кварцевого маятникового акселерометра,
γкм, γнс - температурный коэффициент масштабного коэффициента и смещения нуля кварцевого маятникового акселерометра, записываемый в формуляр при изготовлении акселерометра, Tmax - максимальная температура в корпусе акселерометра, превышающая верхнее значение рабочего диапазона температур за счет тепловыделений, но принадлежащая линейному участку кривых зависимости от температуры масштабного коэффициента и смещения нуля.
Резисторы R1…4 при настройке используют в виде набора регулировочных резисторов, учитывая разброс значений γкм и γнс для разных образцов акселерометров.
6. Выполняют настройку, обеспечивающую термоинвариантность смещения нуля и масштабного коэффициента.
Подают сформированное напряжение компенсации температурной погрешности масштабного коэффициента акселерометра на вход ключа, соответственно, положительной и отрицательной цепи преобразователя «напряжение-частота», а сформированное напряжение компенсации температурной погрешности смещения нуля акселерометра подают на вход интегратора преобразователя «напряжение-частота» с необходимым для компенсации знаком - положительным либо отрицательным.
При этом прибор устанавливают в термокамеру, например «Минисабзеро». Задают температуру окружающей среды, минимальную для его рабочего диапазона температур при эксплуатации. Термосистема18 обеспечивает внутри оболочки температуру Т0, включают систему аппаратной компенсации, обеспечивающую формирование и подачу указанных выше напряжений-поправок на вход интегратора и ключей. При этом измеряют смещение нуля и масштабный коэффициент, которые должны быть равны номинальным значениям, заданным по Т3. Осуществляют уточненную подстройку резисторами R1…4. Затем задают максимальную в термокамере температуру, максимальную для рабочего диапазона температур прибора.
Термосистема 18 автоматически не включается, т.к. внутри оболочки акселерометра температура равна Тмакс, включают систему аппаратной компенсации, обеспечивающую формирование и подачу указанных выше напряжений-поправок на вход интегратора и ключей. При этом измеряют смещение нуля и масштабный коэффициент, которые должны быть равны номинальным значениям, заданным по Т3. При необходимости осуществляют уточненную подстройку резисторами R1…4.
Работа прибора после выполнения настройки его параметров - в процессе эксплуатации.
При действии ускорения маятник акселерометра перемещается в пределах зазора порядка 20 мкм. Сигнал с дифференциального емкостного датчика угла, усиленный и откорректированный усилителем обратной связи, поступает на датчик момента, обеспечивающий компенсацию инерционной силы от действия ускорения.
Компенсационный акселерометр с магнитоэлектрическим датчиком момента имеет токовый выход. Для преобразования выходного тока в выходное напряжение последовательно с обмоткой датчика момента подключается внешнее нагрузочное сопротивление Roc, величина которого определяет масштабный коэффициент акселерометра.
Система обратной связи, как правило, выполняется астатической, т.е. обеспечивается возврат пластины в исходное положение и обнуление сигнала емкостного датчика угла, при этом по цепи обратной связи акселерометра протекает ток, величина которого пропорциональна измеренной проекции вектора кажущегося ускорения на ось чувствительности акселерометра (Ось чувствительности акселерометра - перпендикуляр к плоскости пластины). Аналоговая выходная информация акселерометра снимается в виде напряжения с нагрузочного резистора Roc и поступает на вход преобразователя «напряжение-частота».
Принцип действия преобразователя «напряжение-частота» основан на интегрировании входного напряжения интегратором до некоторого стабильно задаваемого напряжения Vэт с последующим разрядом интегратора через короткозамкнутый ключ. При этом замыкание ключа в момент достижения напряжения на интеграторе значения Vэт - порогового напряжения компаратора, являющегося обязательным элементом схемы преобразователя, обеспечивается переключающим устройством, реализуемым, например, триггером и счетчиком импульсов. В схеме выходное напряжение акселерометра через резистор Rзар подается на вход интегратора. В каждом цикле работы преобразователя в момент времени, когда напряжение на выходе интегратора достигает величины порогового напряжения компаратора, на выходе соответствующего компаратора (по ветке + или -) формируется логический сигнал, например «ЛОГ1», который поступает на первый вход соответствующего триггера (Рис.4). Это означает, что на первом входе этого триггера формируется такой же логический сигнал; при появлении на втором входе триггера, например переднего фронта (схема может строиться и при использовании момента прихода заднего фронта) синхроимпульса частоты f0, поступающего от генератора синхрочастоты, триггер опрокидывается, и с выхода 1в триггера на вход соответствующего электронного ключа поступает сигнал «ЛОГ1», обеспечивающий замыкание ключа и поступление на интегратор эталонного напряжения Vэт. Интегратор разряжается, при этом второй выход 2в того же триггера устанавливается в состояние «ЛОГ0», а вход 2 счетчика импульсов - в состояние «ЛОГ1». При приходе на первый вход счетчика переднего (или заднего) фронта синхроимпульса частоты f0, поступающего от генератора синхрочастоты, счетчик запускается и отсчитывает N периодов синхроимпульсов, формируя строго фиксированное время разряда tразр=const. На выходе преобразователя с помощью формирователя импульсов формируется передний фронт информационного импульса длительностью τи. После отсчета счетчиком N периодов синхроимпульсов и прихода от генератора переднего (или заднего) фронта синхроимпульса частоты f0 на вход 2 триггера - с выхода 1в счетчика на вход 3 триггера поступает сигнал «ЛОГ1». Триггер опрокидывается, при этом состояние его выходов 1в и 2в меняется на противоположное, а именно выход триггера 1в устанавливается в состояние «ЛОГ0», а выход 2в - в состояние «ЛОГ1». Электронный ключ размыкается. Один цикл работы преобразователя завершен.
Основное соотношение, определяющее работу преобразователя «напряжение-частота», имеет вид (2) и выражает собой закон сохранения количества электричества:

Iразр≡const; tразр≡const., Iразр - это ток разряда интегратора, постоянство которого обеспечивается стабильностью напряжения Vэт, создаваемого эталонным источником напряжения преобразователя «напряжение-частота», tразр - время разряда интегратора, постоянство которого обеспечивается стабильностью частоты синхроимпульсов генератора преобразователя «напряжение-частота». Интегратор заряжается током Iзар, величина которого зависит от тока обратной связи Ioс и номиналов резисторов Roc Rзар.

Поскольку заряд интегратора осуществляется током обратной связи акселерометра, а в токе обратной связи Iос присутствуют составляющие ΔКм t,  , представляющие собой, соответственно, изменение масштабного коэффициента и смещения нулевого тока акселерометра в зависимости от изменения температуры, то и частота F± следования импульсов N+, N- на выходе преобразователя «напряжение-частота», т.е. на выходе измерителя линейного ускорения, также оказывается зависящей от температуры.
, представляющие собой, соответственно, изменение масштабного коэффициента и смещения нулевого тока акселерометра в зависимости от изменения температуры, то и частота F± следования импульсов N+, N- на выходе преобразователя «напряжение-частота», т.е. на выходе измерителя линейного ускорения, также оказывается зависящей от температуры.

Выражение (3) - это тот же закон работы преобразователя «напряжение-частота» (2) в другой форме, где F± - частота выходной информации, q=ng - измеряемое линейное ускорение при эксплуатации прибора, Кдм - крутизна характеристики датчика момента акселерометра, Uсм - смещение нуля акселерометра (напряжение).
Напряжение U на выходе акселерометра в функции от входного линейного ускорения q равно

откуда видно, что зависимость масштабного коэффициента акселерометра U/q, входящего в формулу (4), определяется зависимостью от температуры крутизны характеристики датчика момента акселерометра Кдм.
На Фиг.6 представлена типичная зависимость от температуры масштабного коэффициента и смещения нуля кварцевого маятникового акселерометра компенсационного измерения.
Из Фиг.6 следует, что, начиная с некоторой температуры Т0, принадлежащей к температурам выше 0°С, кривая зависимости от температуры масштабного коэффициента и смещения нуля акселерометра имеет линейный участок. При этом следует отметить, что зависимость от температуры смещения нуля может носить как характер линейного возрастания, так и линейного убывания в зависимости от температуры. Линейность указанных зависимостей позволила реализовать в предложенной конструкции аппаратную систему термокомпенсации температурных погрешностей параметров измерителя.
При температуре Т0, т.е. температуре, соответствующей началу линейной части кривой зависимости масштабного коэффициента и смещения нуля от температуры, при настройке прибора на предприятии-изготовителе обеспечивают заданное по техническому заданию значение частоты следования информационных импульсов F, соответствующее действию входного линейного ускорения q=1g, при компенсации смещения нуля Uсм=0. Это обеспечивается, как было показано выше, выбором резисторов Rразр, Rзар, Rос (резистор, компенсирующий смещение нуля при Т0, на схеме не показан).

При Т0 температуре, соответствующей началу линейной части кривой зависимости масштабного коэффициента и смещения нуля от температуры, значение частоты следования информационных импульсов записывается выражением (6)

На заводе-изготовителе была выполнена настройка прибора для обеспечения термоинвариантности масштабного коэффициента, для чего в положительную цепь преобразователя на вход 1 ключа 30 подается дополнительное напряжение, формируемое на резисторе R1, выбранном в соответствии с выражением (7)

а в отрицательную цепь преобразователя на вход 1 ключа 30 подается дополнительное напряжение, формируемое на резисторе R2

выбранном в соответствии с выражением (8).
Проверим, будет ли частота  равна
равна  при такой аппаратной компенсации.
при такой аппаратной компенсации.
Для этого в формулу (5) вместо R± разр нужно подставить R± разрT0+R1,2 и вместо крутизны характеристики датчика момента Кдм выражение, определяющее зависимость крутизны от температуры, а именно

После подстановки получаем выражение для частоты
при условии введения напряжений-поправок, сформированных на резисторах R1,2

Таким образом,

Термоинвариантность масштабного коэффициента прибора указанной настройкой была обеспечена, т.е.
=
.
Покажем, что при выборе номиналов резисторов R3 и R4 в соответствии с выражениями (10) обеспечивается термоинвариантность смещения нуля прибора.


Зависимость смещения нуля от температуры имеет вид (11)

Эта зависимость означает, что для одних образцов акселерометров с ростом температуры смещение нуля линейно растет (в диапазоне температур выше 30°С), для других образцов убывает линейно. Именно поэтому на вход интегратора в схеме Рис.3 компенсационное напряжение подают в одних случаях со знаком плюс, в других со знаком минус.
При температуре Т0 частота выходной информации F±, вызываемая наличием смещения Uсм нуля, определяется выражением (12)

При максимальной температуре Tmax частота, вызываемая смещением нуля, запишется в виде (13), если при увеличении температуры смещение нуля уменьшается (ниспадающий вид линейного участка кривой зависимости Uсм от температуры). В этом случае для обеспечения термоинвариантности смещения нуля необходимо на вход интегратора подавать напряжение-поправку со знаком плюс, чтобы увеличить частоту, сделав ее равной частоте при температуре Т0, т.е. поправка формируется на резисторе R3

Поскольку γ2 нс·(Tmax-T0)2 имеет порядок (30.10-6)2.252=0,6.10-6, т.е. от 1 составляет 0,6.10-4%, то условие термоинвариантности (13) смещения нуля выполняется с высокой степенью точности. Этой методической погрешностью можно пренебречь.
Если при увеличении температуры смещение нуля увеличивается (восходящий вид линейного участка кривой зависимости Uсм от температуры.), то при максимальной температуре Tmax частота, вызываемая смещением нуля, запишется в виде (14), поскольку в этом случае для обеспечения термоинвариантности смещения нуля на вход интегратора подается напряжение-поправка со знаком минус (знак минус формирует инвертор), чтобы уменьшить частоту, сделав ее равной частоте при температуре Т0, т.е. поправка формируется на резисторе R4

Условие термоинвариантности
=
прибора по смещению нуля также обеспечивается.
Таким образом, заявлен термоинвариантный измеритель линейного ускорения, содержащий кварцевый компенсационный маятниковый акселерометр, преобразователь напряжения в частоту, входом связанный с выходом акселерометра, термосистему, содержащую первую мостовую схему резисторов, в одно из плеч которой включен первый термодатчик, усилитель мощности, вход которого соединен с выходом первой мостовой схемы, а выход соединен с катушкой обогрева, охватывающей корпус акселерометра, причем первый термодатчик установлен между катушкой и корпусом акселерометра, а входная диагональ первой мостовой схемы подключена к источнику вторичного питания, при этом преобразователь содержит нагрузочный резистор, который подключен к выходу усилителя обратной связи, генератор синхрочастоты, интегратор, резистор заряда Rзар, две симметричные цепи преобразования положительной и отрицательной информации, каждая из цепей содержит соединенные последовательно в каждой цепи преобразования эталонный источник напряжения, компаратор, резистор разряда Rразр, переключающее устройство, содержащее электронный ключ, триггер, счетчик тактовых импульсов, и формирователь импульсной выходной информации; при этом Rзар соединен через нагрузочный резистор Roc с выходом усилителя обратной связи и с входом интегратора, выход интегратора соединен с первым входом каждого из компараторов, второй вход каждого компаратора соединен с первым выходом соответствующего эталонного источника напряжения, второй выход эталонного источника напряжения через соответствующие резисторы Rразр соединен с первым входом соответствующего ключа, выход ключа соединен с входом интегратора, выход компаратора соединен с первым входом триггера, второй вход триггера и первый вход счетчика соединены с выходом генератора синхрочастоты, третий вход триггера соединен с выходом соответствующего счетчика, первый выход триггера соединен со вторым входом соответствующего ключа, второй выход триггера соединен со вторым входом счетчика, выход счетчика соединен с входом соответствующего формирователя и с третьим входом соответствующего триггера.
Отличительная особенность состоит в том, что введена система аппаратной компенсации температурных погрешностей, содержащая вторую мостовую схему резисторов, входная диагональ которой связана с источником вторичного питания, второй термодатчик, установленный внутри корпуса акселерометра и включенный в одно из плеч второй мостовой схемы, измерительный усилитель, инвертор и четыре резистора R1-4, выход второй мостовой схемы соединен с входом измерительного усилителя, при этом R1 соединен первым выводом с первым выходом измерительного усилителя, R2 соединен первым выводом через первый канал инвертора со вторым выходом измерительного усилителя, вторые выводы R1 и R2 соединены с информационными входами ключей соответственно положительной и отрицательной цепей преобразователя; R3 первым выводом соединен с третьим выходом измерительного усилителя, R4 первым выводом через второй канал инвертора соединен с четвертым выходом измерительного усилителя, вторые выводы R3 и R4 соединены с входом интегратора преобразователя.
Термоинвариантные измерители могут компоноваться в блоки измерителей линейного ускорения, которые содержат «n» измерительных каналов (n=1, 3, 4, 5, 6). Все каналы имеют одинаковую структуру. Каждый измерительный канал содержит кварцевый маятниковый акселерометр и преобразователь «напряжение-частота» указанной структуры, что позволяет получить термоинвариантный блок измерителей линейного ускорения.
Термоинвариантный измеритель линейного ускорения, содержащий кварцевый компенсационный маятниковый акселерометр, преобразователь напряжения в частоту, входом связанный с выходом акселерометра, термосистему, содержащую первую мостовую схему резисторов, в одно из плеч которой включен первый термодатчик, усилитель мощности, вход которого соединен с выходом первой мостовой схемы, а выход соединен с катушкой обогрева, охватывающей корпус акселерометра, причем первый термодатчик установлен между катушкой и корпусом акселерометра, а входная диагональ первой мостовой схемы подключена к источнику вторичного питания, при этом преобразователь содержит нагрузочный резистор, который подключен к выходу усилителя обратной связи, генератор синхрочастоты, интегратор, резистор заряда R, две симметричные цепи преобразования положительной и отрицательной информации, каждая из цепей содержит соединенные последовательно в каждой цепи преобразования эталонный источник напряжения, компаратор, резистор разряда R, переключающее устройство, содержащее электронный ключ, триггер, счетчик тактовых импульсов, и формирователь импульсной выходной информации; при этом R соединен через нагрузочный резистор R с выходом усилителя обратной связи и с входом интегратора, выход интегратора соединен с первым входом каждого из компараторов, второй вход каждого компаратора соединен с первым выходом соответствующего эталонного источника напряжения, второй выход эталонного источника напряжения через соответствующие резисторы R соединен с первым входом соответствующего ключа, выход ключа соединен с входом интегратора, выход компаратора соединен с первым входом триггера, второй вход триггера и первый вход счетчика соединены с выходом генератора синхрочастоты, третий вход триггера соединен с выходом соответствующего счетчика, первый выход триггера соединен со вторым входом соответствующего ключа, второй выход триггера соединен со вторым входом счетчика, выход счетчика соединен с входом соответствующего формирователя и с третьим входом соответствующего триггера, отличающийся тем, что введена система аппаратной компенсации температурных погрешностей, содержащая вторую мостовую схему резисторов, входная диагональ которой связана с источником вторичного питания, второй термодатчик, установленный внутри корпуса акселерометра и включенный в одно из плеч второй мостовой схемы, измерительный усилитель, инвертор и четыре резистора R, выход второй мостовой схемы соединен с входом измерительного усилителя, при этом резистор R соединен первым выводом с первым выходом измерительного усилителя, резистор R соединен первым выводом через первый канал инвертора со вторым выходом измерительного усилителя, вторые выводы резисторов R и R соединены с информационными входами ключей, соответственно, положительной и отрицательной цепей преобразователя; резистор R первым выводом соединен с третьим выходом измерительного усилителя, резистор R первым выводом через второй канал инвертора соединен с четвертым выходом измерительного усилителя, вторые выводы резисторов R и R соединены с входом интегратора преобразователя.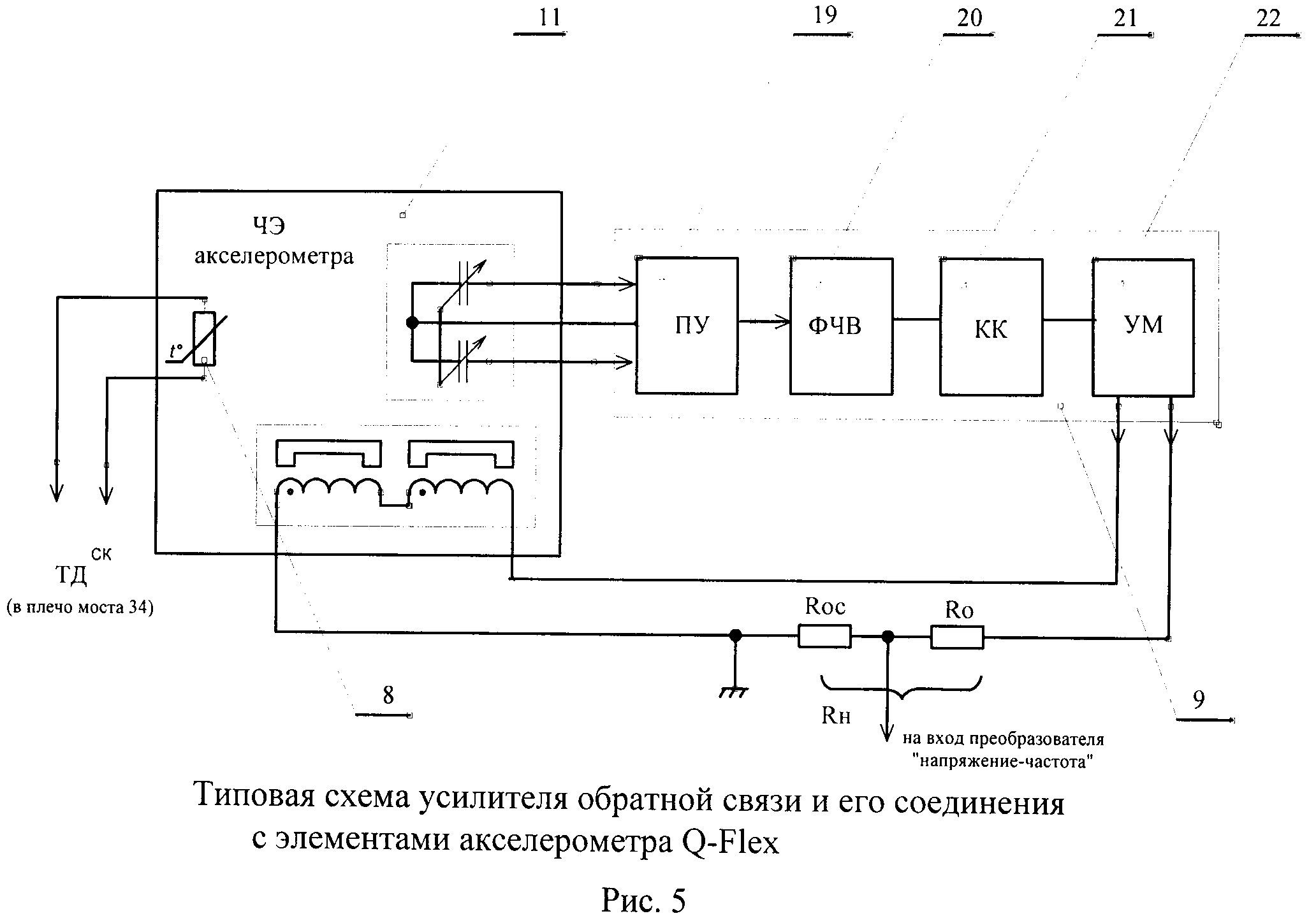
Способ изготовления склеивающей прокладки
Цифровой сервопривод
Сервопривод
Гирокомпас с визуальным каналом
Управляемый мажоритарный элемент "три из пяти"
Преобразователь угловой информации
Устройство карданова подвеса для увеличения диапазона углов поворота изделия
Устройство питания электронных схем
Реверсивный регулятор температуры
Бесплатформенный измеритель линейных и угловых скоростей
Способ изготовления склеивающей прокладки
Цифровой сервопривод
Сервопривод
Способ оперативной проверки гиромотора и устройство для его реализации
Двухосный поворотный стенд
Устройство базирования многогранных призм

