Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано в электроприводах для измерения угловой скорости вращения в установившихся и переходных режимах.
Известен способ для измерения угловой скорости вращения трехфазного асинхронного электродвигателя [Тун А.Я. Системы контроля скорости электропривода. М.: Энергоатомиздат, 1984, c. 108-109], основанный на использовании асинхронных тахогенераторов.
Такой тахогенератор имеет шихтованный статор с двумя обмотками - задающей и приемной, сдвинутыми относительно друг друга на 90°. Ротор, закрепленный на оси, представляет собой полый тонкостенный цилиндр из немагнитного металла (дюраль, бронза). Внутри ротора расположен цилиндр из шихтованной стали.
Известный способ осуществляют следующим образом.
Подают на задающую обмотку переменного синусоидальное напряжение U3, при этом ротор играет роль размагничивающего короткозамкнутого витка. До начала вращения магнитный поток Фq, образованный задающей МДС и реакцией ротора, проходит только по продольной оси и не попадает в приемную обмотку.
При вращении ротора в его частях, пересекающих силовые линии потока Фd, возникает ЭДС lq, ее действие приводит к протеканию тока в верхних и нижних слоях ротора и созданию магнитного потока поперечной оси Фq.
Мгновенное значение ЭДС lq, связанной с линейной скоростью ротора  и индукцией Bd продольного потока, определяется выражением
и индукцией Bd продольного потока, определяется выражением

где L - длина активной части ротора;
D - диаметр ротора;
n - частота вращения ротора;
 - частота сети, питающей задающую обмотку.
- частота сети, питающей задающую обмотку.
Поскольку L, D и Bd - величины постоянные, можно записать
 ,
,
тогда амплитуда ЭДС
 ,
,
где  .
.
Аналогично
 .
.
Под действием поперечного магнитного потока Фq в приемной обмотке индуктируется ЭДС Еп, имеющая частоту питающей сети f


Для каждого тахогенератора все параметры, кроме потока, являются неизменными, поэтому
Анализ показывает, что в приемной обмотке тахогенератора при вращении ротора возникает периодическая ЭДС; амплитуда наведенной ЭДС пропорциональна скорости ротора, а частота равна частоте сети, питающей задающую обмотку.
Способ обладает рядом недостатков. Основной из них заключается в том, что информация об угловой скорости вращения электродвигателя может быть получена на основе дополнительного, механически присоединенного к электродвигателю тахогенератора, требуется тщательная установка тахогенератора и механическое сочленение с вращающимися частями электродвигателя. Это снижает точность измерения угловой скорости вращения в динамических режимах работы электродвигателя, также применение тахогенератора нецелесообразно по стоимостным ограничениям. Другим существенным недостатком способа является его сложность.
Наиболее близким и взятым за прототип является способ измерения угловой скорости вращения трехфазного асинхронного электродвигателя [KZ 21033 А4, МКП G01L 3/10, опубл. 16.03.2009, бюл. №3], заключающийся в измерении мгновенных значений фазных токов ia, ib на фазах А и В или ib, ic фазных токов на фазах B и C, либо ia, ic фазных токов на фазах А и C, подводимых к статору, и в измерении мгновенных значений фазных напряжений ua, ub на фазах А и В или ub, uc фазных напряжений на фазах B и C, либо ua, uc фазных напряжений на фазах А и C, подводимых к статору, при известных активном сопротивлении обмотки статора  и активном сопротивлении приведенного ротора
и активном сопротивлении приведенного ротора  , полной индуктивности обмотки статора
, полной индуктивности обмотки статора  ; приведенной полной индуктивности обмотки ротора
; приведенной полной индуктивности обмотки ротора  , взаимной индуктивности обмоток статора и ротора
, взаимной индуктивности обмоток статора и ротора  , а угловую скорость вращения трехфазного асинхронного электродвигателя
, а угловую скорость вращения трехфазного асинхронного электродвигателя  (t) определяют с учетом измеренного мгновенного значения угловой скорости
(t) определяют с учетом измеренного мгновенного значения угловой скорости  , динамической интегральной составляющей относительного значения угловой скорости
, динамической интегральной составляющей относительного значения угловой скорости  , динамической дифференциальной составляющей относительного значения угловой скорости
, динамической дифференциальной составляющей относительного значения угловой скорости  по выражению:
по выражению:
 ,
,
при этом измеренное мгновенное значение угловой скорости
определяют по выражению:
 ,
,
для динамической интегральной составляющей относительного значения угловой скорости
вычисляют коэффициент  как отношение полной индуктивности обмотки статора
как отношение полной индуктивности обмотки статора  к приведенной полной индуктивности обмотки ротора
и определяют
по выражению:
к приведенной полной индуктивности обмотки ротора
и определяют
по выражению:
 ,
,
а для динамической дифференциальной составляющей относительного значения угловой скорости
вычисляют коэффициенты
,  и постоянную времени обмотки ротора
и постоянную времени обмотки ротора  , коэффициент
находят как отношение взаимной индуктивности обмоток статора и ротора
, коэффициент
находят как отношение взаимной индуктивности обмоток статора и ротора  к приведенной полной индуктивности
к приведенной полной индуктивности  , постоянную времени обмотки ротора
находят как отношение приведенной полной индуктивности
, постоянную времени обмотки ротора
находят как отношение приведенной полной индуктивности  к приведенному активному сопротивлению обмотки ротора
к приведенному активному сопротивлению обмотки ротора  и определяют по выражению:
и определяют по выражению:
 .
.
У данного способа недостаточная точность измерения угловой скорости вращения асинхронного электродвигателя, точность составляет 94-95%.
В связи с этим поставлена задача разработать способ измерения угловой скорости вращения трехфазного асинхронного электродвигателя, который позволяет повысить точность результата.
Технический результат изобретения - повышение точности измерения значения угловой скорости вращения в динамических режимах работы электропривода.
Задача изобретения достигается тем, что способ измерения угловой скорости вращения трехфазного асинхронного электродвигателя, так же как в прототипе, заключается в измерении мгновенных значений фазных токов ia, ib и напряжений ua, ub на фазах А и В, подводимых к статору, при известных активном сопротивлении обмотки статора
, активном сопротивлении приведенного ротора
, полной индуктивности обмотки статора
, приведенной полной индуктивности обмотки ротора
, взаимной индуктивности обмоток статора и ротора
, в определении коэффициента  как отношения полной индуктивности обмотки статора
к приведенной полной индуктивности обмотки ротора
, коэффициента
как отношения полной индуктивности обмотки статора
к приведенной полной индуктивности обмотки ротора
, коэффициента  как отношения взаимной индуктивности обмоток статора и ротора
к приведенной полной индуктивности
, постоянной времени обмотки ротора
как отношения приведенной полной индуктивности
к приведенному активному сопротивлению обмотки ротора
, динамической дифференциальной составляющей относительного значения угловой скорости
, динамической интегральной составляющей относительного значения угловой скорости
как отношения взаимной индуктивности обмоток статора и ротора
к приведенной полной индуктивности
, постоянной времени обмотки ротора
как отношения приведенной полной индуктивности
к приведенному активному сопротивлению обмотки ротора
, динамической дифференциальной составляющей относительного значения угловой скорости
, динамической интегральной составляющей относительного значения угловой скорости  , измеренного мгновенного значения угловой скорости
, измеренного мгновенного значения угловой скорости  для определения угловой скорости вращения
для определения угловой скорости вращения  асинхронного электродвигателя по выражению:
асинхронного электродвигателя по выражению:

Согласно изобретению одновременно с измерением мгновенных значений ia, ib фазных токов и напряжений ua, ub измеряют температуру  проводников обмотки статора и частоту f основной гармоники напряжения статора трехфазного асинхронного электродвигателя, определяют сопротивление обмотки статора с учетом температурного коэффициента z:
проводников обмотки статора и частоту f основной гармоники напряжения статора трехфазного асинхронного электродвигателя, определяют сопротивление обмотки статора с учетом температурного коэффициента z:
 ,
,
где  - температурный коэффициент, характеризующий свойства проводников обмотки статора трехфазного асинхронного электродвигателя,
- температурный коэффициент, характеризующий свойства проводников обмотки статора трехфазного асинхронного электродвигателя,
сопротивление приведенной обмотки ротора  с учетом коэффициента
с учетом коэффициента  :
:
 ,
,
индуктивное сопротивление  с учетом коэффициента
с учетом коэффициента :
:
 .
.
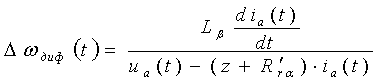
Динамическую дифференциальную составляющую относительного значения угловой скорости
определяют по выражению:
 .
.
Динамическую интегральную составляющую относительного значения угловой скорости
определяют по выражению:
 .
.
Измеренное мгновенное значение угловой скорости
определяют по формуле:
 .
.
Затем, используя полученные значения, определяют угловую скорость вращения
трехфазного асинхронного электродвигателя и результаты визуализируют.
Предложенный способ за счет учета температуры
проводников обмотки статора, температурного коэффициента
и частоты f основной гармоники напряжения статора позволяет повысить точность измерения угловой скорости вращения трехфазного асинхронного электродвигателя.
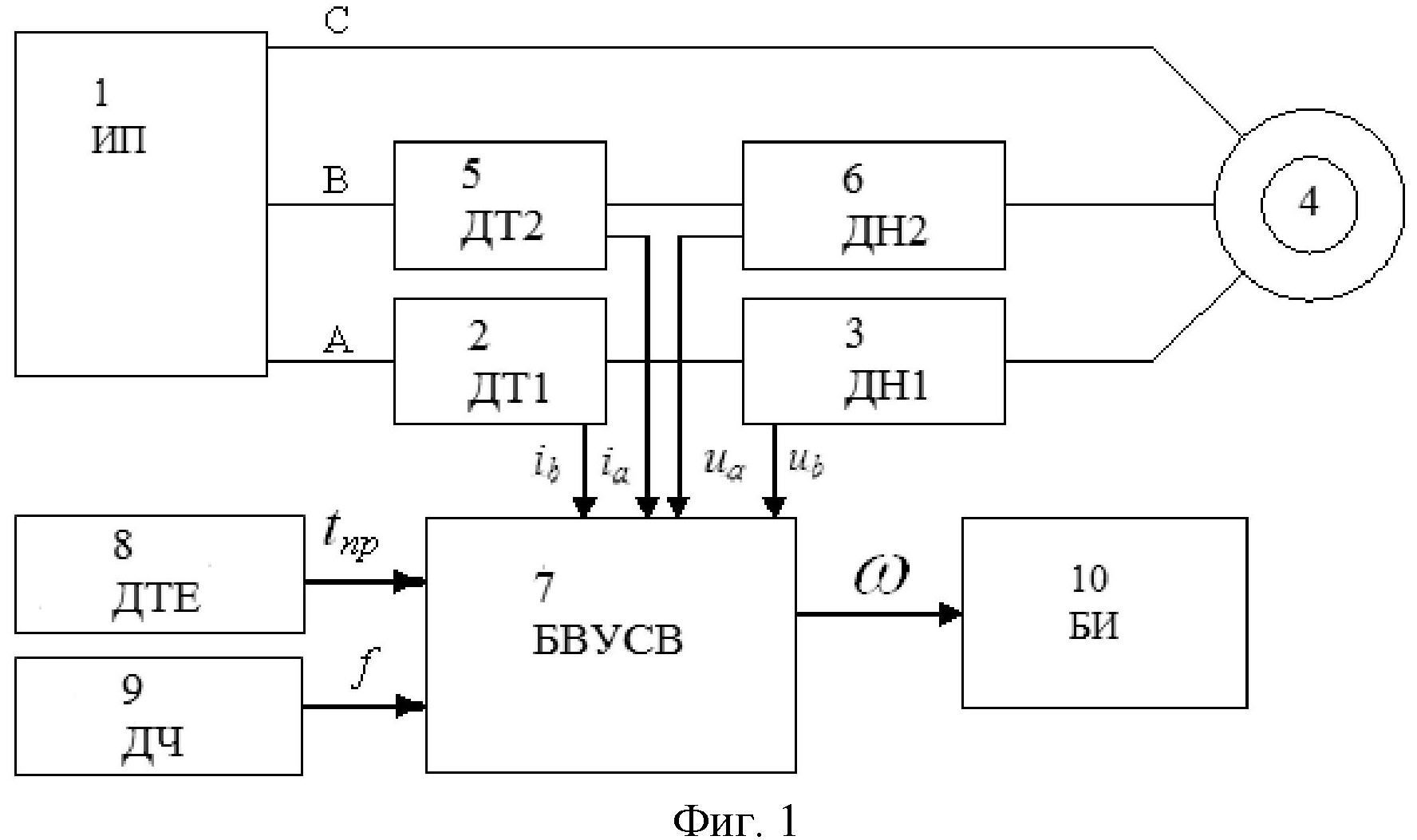
На фиг. 1 приведена общая схема для измерения угловой скорости вращения трехфазного асинхронного электродвигателя согласно заявляемому способу.
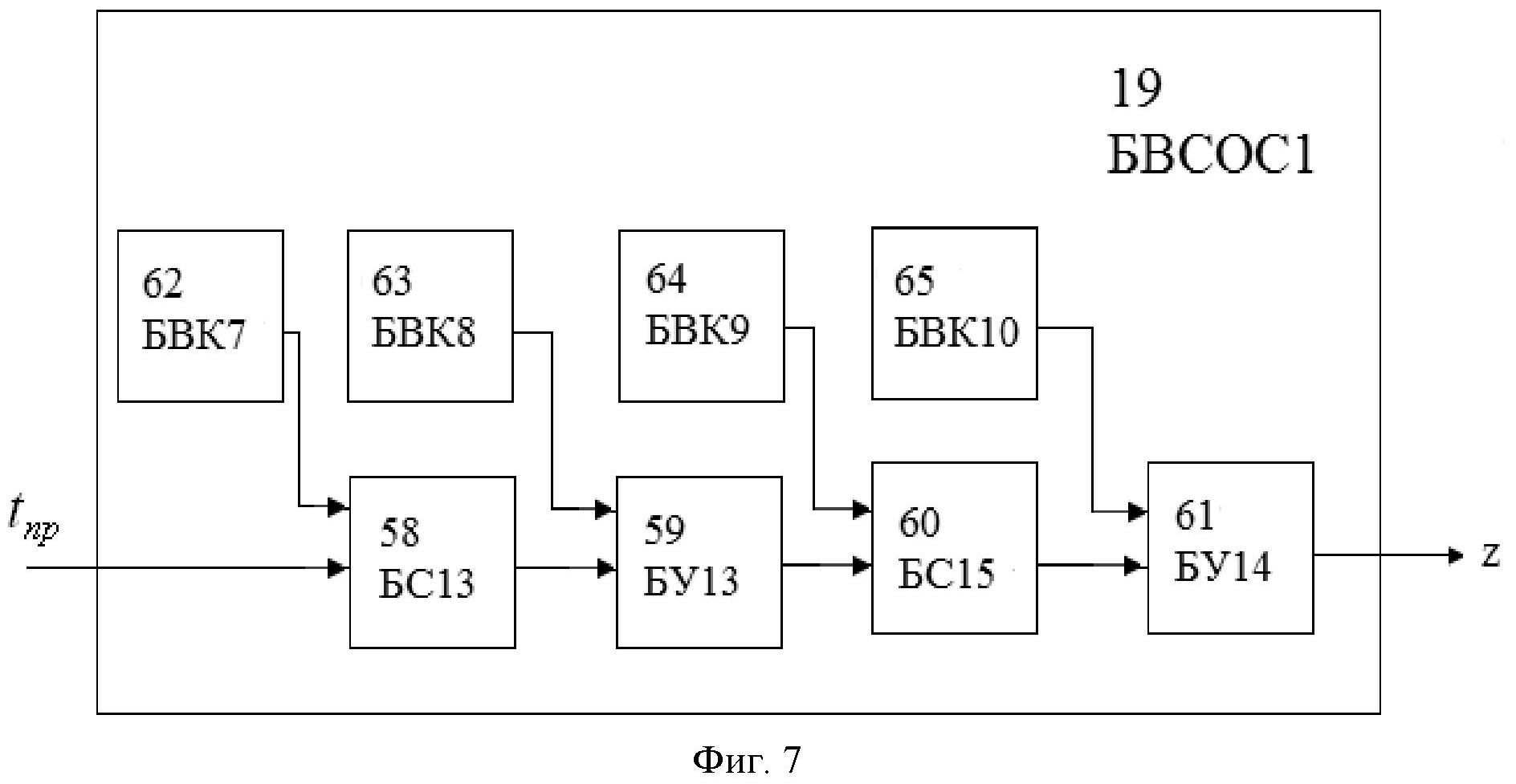
На фиг. 2 приведена схема блока вычисления угловой скорости вращения 7 (БВУСВ)
.
На фиг. 3 приведена схема блока для вычисления динамической дифференциальной составляющей относительного значения угловой скорости 12 (БВДДС)
.
На фиг. 4 изображена схема блока для вычисления динамической интегральной составляющей относительного значения угловой скорости 13 (БВДИС)
.
На фиг. 5 изображена схема блока для вычисления измеренного мгновенного значения угловой скорости 16 (БВИМЗ)  .
.
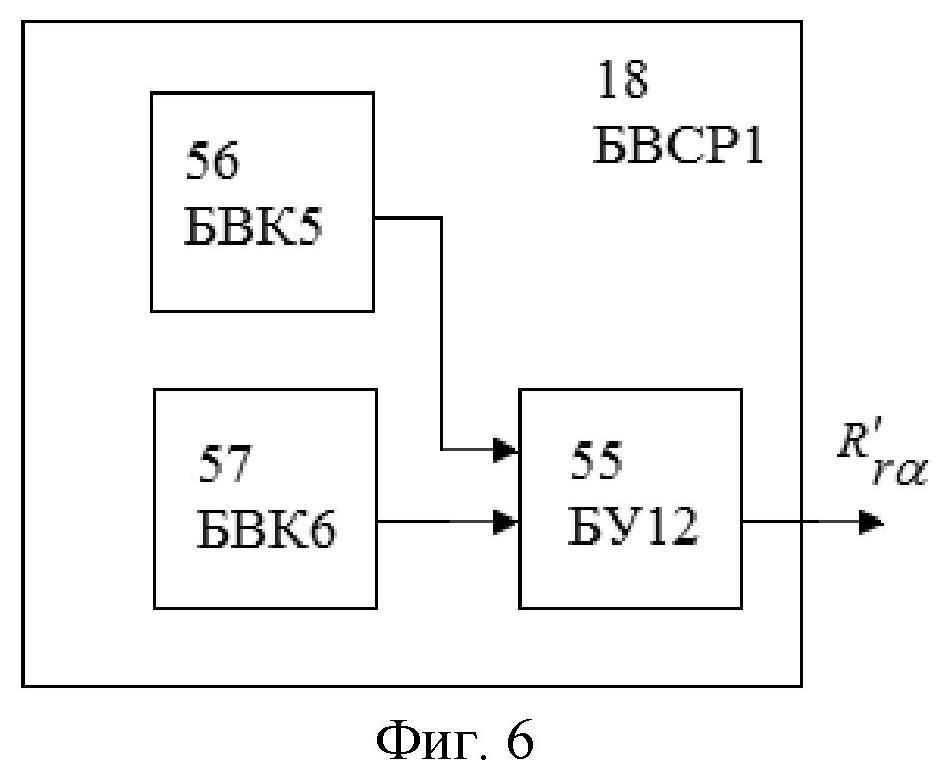
На фиг. 6 приведена схема блока вычисления сопротивления обмотки ротора 18 (БВСР1).
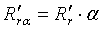
На фиг. 7 приведена схема блока вычисления сопротивления обмотки статора с учетом температурного коэффициента 19 (БВСОС1).
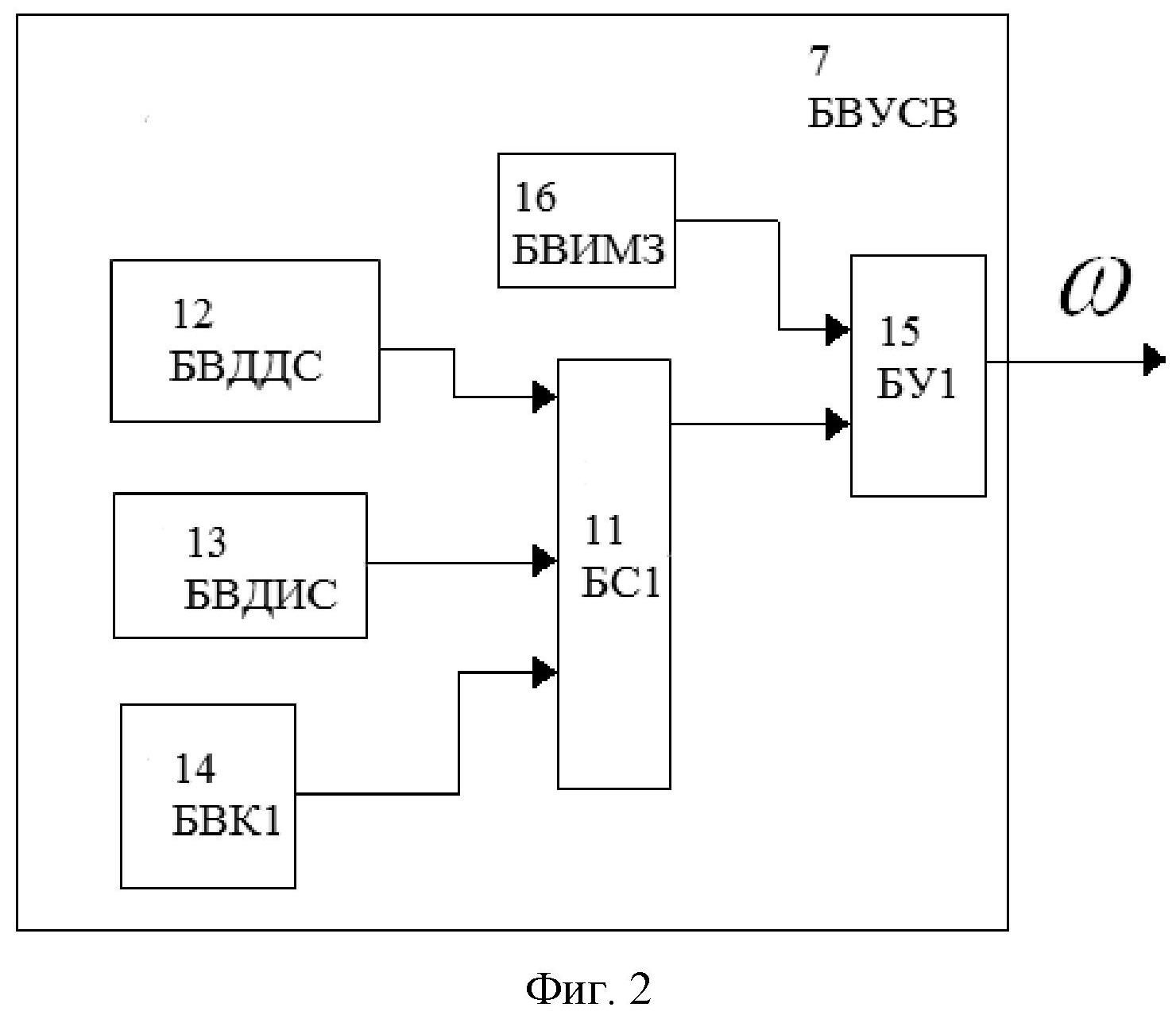
На фиг. 8 приведена схема блока вычисления периода 33 (БВТ1).
На фиг. 9 представлена схема блока вычисления сопротивления обмотки статора 23 (БВСС1).
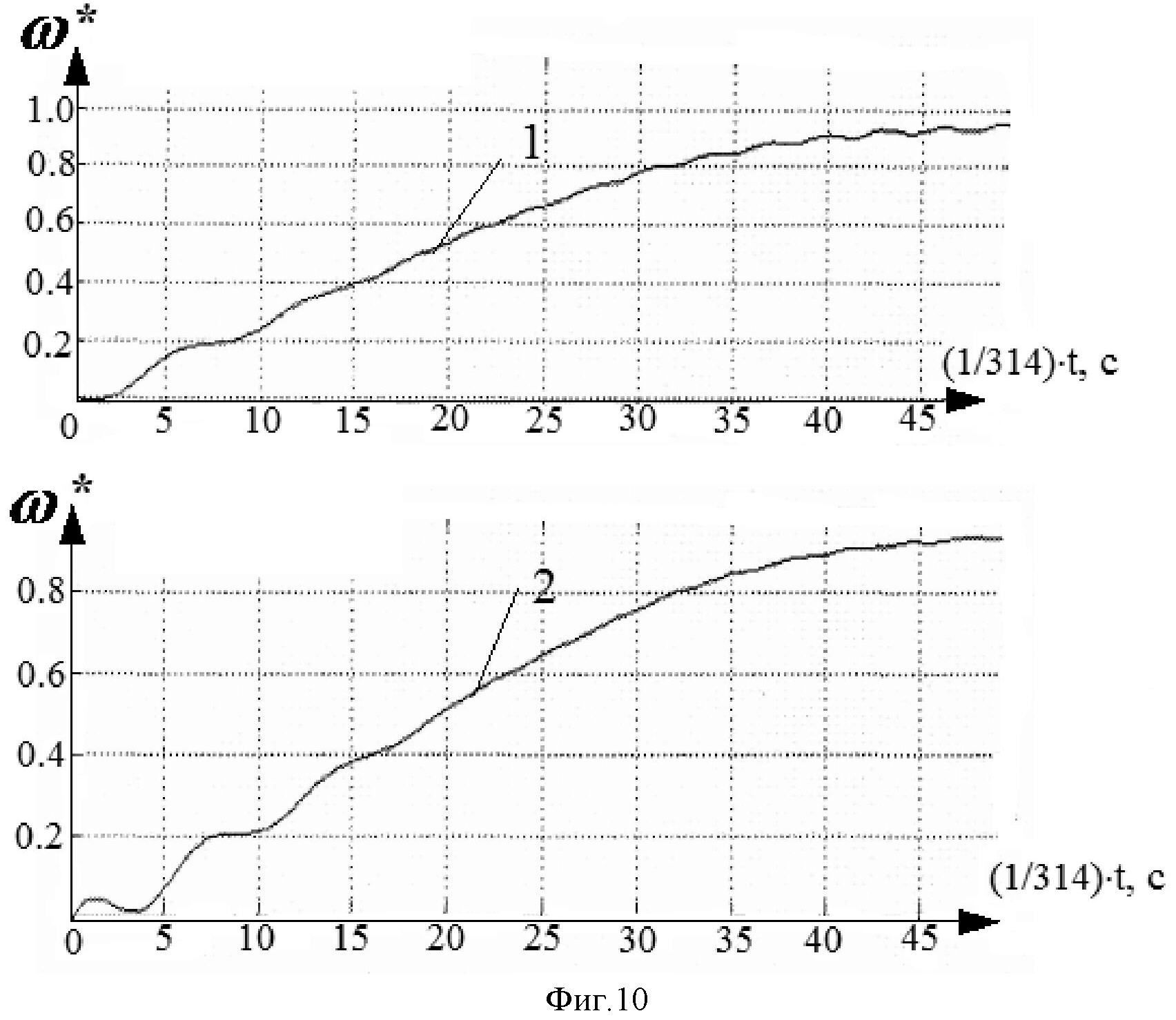
На фиг. 10 представлены характеристики угловой скорости вращения  , где кривая 1 - характеристика для способа-прототипа, а кривая 2 - для предложенного способа.
, где кривая 1 - характеристика для способа-прототипа, а кривая 2 - для предложенного способа.
Общая схема для измерения угловой скорости вращения трехфазного асинхронного электродвигателя (фиг. 1) содержит источник питания 1 (ИП), к которому последовательно подключены по фазе А первый датчик тока 2 (ДТ1), первый датчик напряжения 3 (ДН1) и трехфазный асинхронный электродвигатель 4. К источнику питания 1 (ИП) по фазе В последовательно подключены второй датчик тока 5 (ДТ2), второй датчик напряжения 6 (ДН2) и трехфазный асинхронный электродвигатель 4. По фазе С к источнику питания 1 (ИП) последовательно подсоединен трехфазный асинхронный электродвигатель 4. Выходы датчиков напряжения 3 (ДН1), 6 (ДН2) и тока 2 (ДТ1), 5 (ДТ2) подключены к блоку вычисления угловой скорости вращения 7 (БВУСВ), к входу которого подключены датчик температуры 8 (ДТЕ) и датчик частоты 9 (ДЧ). Выход блока вычисления угловой скорости вращения 7 (БВУСВ) подключен к блоку индикации 10 (БИ).
Блок вычисления угловой скорости вращения 7 (БВУСВ) (фиг. 2) содержит блок суммирования 11 (БС1), который связан с блоком для вычисления динамической дифференциальной составляющей относительного значения угловой скорости 12 (БВДДС), с блоком для вычисления динамической интегральной составляющей относительного значения угловой скорости 13 (БВДИС), с блоком ввода коэффициентов 14 (БВК1), с блоком умножения 15 (БУ1), который связан с блоком для вычисления измеренного мгновенного значения угловой скорости 16 (БВИМЗ). Блок умножения 15 (БУ1) соединен с блоком индикации 10 (БИ).
Блок для вычисления динамической составляющей относительного значения угловой скорости 12 (БВДДС) (фиг. 3) содержит второй блок суммирования 17 (БС2), который соединен с первым датчиком тока 2 (ДТ1), с блоком вычисления сопротивления обмоток ротора 18 (БВСР1), с блоком вычисления сопротивления обмоток статора с учетом температурного коэффициента 19 (БВСОС1). Третий блок суммирования 20 (БС3) связан со вторым блоком суммирования 17 (БС2), с первым датчиком напряжения 3 (ДН1) и со вторым блоком умножения 21 (БУ2), который подключен к первому блоку суммирования 11 (БС1).
Третий блок умножения 22 (БУ3) связан с блоком вычисления сопротивления обмоток статора 23 (БВСС1), со вторым блоком умножения 21 (БУ2), с блоком дифференцирования 24 (БД), который подключен к первому датчику тока 2 (ДТ1).
Блок для вычисления динамической интегральной составляющей относительного значения угловой скорости 13 (БВДИС) (фиг. 4) содержит второй блок вычисления сопротивления обмоток ротора 25 (БВСР2), к которому последовательно подключены четвертый блок суммирования 26 (БС4), четвертый блок умножения 27 (БУ4), пятый блок суммирования 28 (БС5) и пятый блок умножения 29 (БУ5), который связан с первым блоком суммирования 11 (БС1).
Второй блок вычисления сопротивления обмоток статора с учетом температурного коэффициента 30 (БВСОС2) подключен к четвертому блоку суммирования 26 (БС4), к шестому блоку суммирования 31 (БС6), к которому последовательно подключены блок интегрирования 32 (БИН1) и пятый блок умножения 29 (БУ5). Блок вычисления периода 33 (БВТ1) подключен к первому блоку интегрирования 32 (БИН1). Второй блок введения коэффициентов 34 (БВК2) подключен к пятому блоку умножения 29 (БУ5).
Первый датчик тока 2 (ДТ1) соединен со вторым блоком вычисления сопротивления обмоток статора с учетом температурного коэффициента 30 (БВСОС2), с четвертым блоком умножения 27 (БУ4). Первый датчик напряжения 3 (ДН1) соединен с шестым блоком суммирования 31 (БС6) и с пятым блоком суммирования 28 (БС5).
Блок для вычисления измеренного мгновенного значения угловой скорости 16 (БВИМЗ) (фиг. 5) содержит последовательно соединенные третий блок вычисления сопротивления обмоток статора с учетом температурного коэффициента 35 (БВСОС3), седьмой блок суммирования 36 (БС7), шестой блок умножения 37 (БУ6), восьмой блок суммирования 38 (БС8), третий блок ввода коэффициентов 39 (БВК3), седьмой блок умножения 40 (БУ7), который подключен к первому блоку умножения 15 (БУ1).
Третий блок вычисления сопротивления обмоток статора с учетом температурного коэффициента 35 (БВСОС3) соединен с восьмым блоком умножения 41 (БУ8).
Третий блок вычисления сопротивления обмоток ротора 42 (БВСР3) связан с седьмым блоком суммирования 36 (БС7).
К четвертому блоку ввода коэффициентов 43 (БВК4) последовательно подключены девятый блок умножения 44 (БУ9), девятый блок суммирования 45 (БС9), восьмой блок умножения 41 (БУ8), десятый блок суммирования 46 (БС10), второй блок интегрирования 47 (БИН2), одиннадцатый блок суммирования 48 (БС11) и седьмой блок умножения 40 (БУ7).
Десятый блок умножения 49 (БУ10) связан со вторым датчиком напряжения 6 (ДН2), с четвертым блоком ввода коэффициентов 43 (БВК4) и с двенадцатым блоком суммирования 50 (БС12).
Тринадцатый блок суммирования 51 (БС13) подключен к первому 2 (ДТ1) и второму 5 (ДТ2) датчикам тока, к одиннадцатому блоку умножения 52 (БУ11), который соединен с одиннадцатым блоком суммирования 48 (БС11) и со вторым блоком вычисления сопротивления обмотки статора 53 (БВСС2).
Одиннадцатый блок суммирования 50 (БС11) соединен с первым датчиком напряжения 3 (ДН1) и с девятым блоком суммирования 46 (БС9).
Шестой блок умножения 37 (БУ6) соединен с первым датчиком тока 2 (ДТ1).
Восьмой блок суммирования 38 (БС8) соединен с первым датчиком напряжения 3 (ДН1).
Девятый блок умножения 44 (БУ9) соединен со вторым датчиком тока 5 (ДТ2).
Девятый блок суммирования 45 (БС9) соединен с первым датчиком тока 2 (ДТ1).
Второй блок вычисления периода 54 (БВТ2) соединен со вторым блоком интегрирования 47 (БИН2).
Блоки вычисления сопротивления обмотки ротора 18 (БВСР1), 25 (БВСР2) и 42 (БВСР3) реализованы идентично и каждый содержит двенадцатый блок умножения 55 (БУ12) (фиг. 6), который соединен с пятым и шестым блоками ввода коэффициентов 56 (БВК5) и 57 (БВК6).
В первом блоке вычисления сопротивления обмотки ротора 18 (БВСР1) двенадцатый блок умножения 55 (БУ12) связан со вторым блоком суммирования 17 (БС2).
Во втором блоке вычисления сопротивления обмотки ротора 25 (БВСР2) двенадцатый блок умножения 55 (БУ12) связан с четвертым блоком суммирования 26 (БС4).
В третьем блоке вычисления сопротивления обмотки ротора 42 (БВСР3) двенадцатый блок умножения 55 (БУ12) связан с седьмым блоком суммирования 36 (БС7).
Блоки вычисления сопротивления обмотки статора с учетом температурного коэффициента 19 (БВСОС1), 30 (БВСОС2) и 35 (БВСОС3) реализованы идентично и каждый состоит из последовательно соединенных четырнадцатого блока суммирования 58 (БС14) (фиг. 7), тринадцатого блока умножения 59 (БУ13), пятнадцатого блока суммирования 60 (БС15) и четырнадцатого блока умножения 61 (БУ14). Седьмой блок ввода коэффициентов 62 (БВК7) соединен с четырнадцатым блоком суммирования 58 (БС14).
Восьмой блок ввода коэффициентов 63 (БВК8) соединен с тринадцатым блоком умножения 59 (БУ13).
Девятый блок ввода коэффициентов 64 (БВК9) соединен с пятнадцатым блоком суммирования 60 (БС15).
Десятый блок ввода коэффициентов 65 (БВК8) соединен с четырнадцатым блоком умножения 61 (БУ14).
Четырнадцатый блок суммирования 58 (БС14) связан с датчиком температуры 8 (ДТЕ).
В первом блоке вычисления сопротивления обмотки статора с учетом температурного коэффициента 19 (БВСОС1) четырнадцатый блок умножения 61 (БУ14) подключен ко второму блоку суммирования 17 (БС2).
Во втором блоке вычисления сопротивления обмотки статора с учетом температурного коэффициента 30 (БВСОС2) четырнадцатый блок умножения 61 (БУ14) подключен к шестому блоку суммирования 31 (БС6) и к четвертому блоку суммирования 26 (БС4).
В третьем блоке вычисления сопротивления обмотки статора с учетом температурного коэффициента 35 (БВСОС3) четырнадцатый блок умножения 61 (БУ14) подключен к седьмому блоку суммирования 36 (БС7) и к восьмому блоку умножения 41 (БУ8).
Блоки вычисления периода 33 (БВТ1) и 54 (БВТ2) одинаковы и каждый содержит пятнадцатый блок умножения 66 (БУ15) (фиг. 8), который соединен с одиннадцатым блоком ввода коэффициентов 67 (БВК11) и с датчиком частоты 9 (ДЧ).
В первом блоке вычисления периода 33 (БВТ1) пятнадцатый блок умножения 66 (БУ15) подключен к первому блоку интегрирования 32 (БИН1).
Во втором блоке вычисления периода 54 (БВТ2) пятнадцатый блок умножения 66 (БУ15) подключен ко второму блоку интегрирования 47 (БИН2).
Блоки вычисления сопротивления обмотки статора 23 (БВСС1) и 53 (БВСС2) выполнены одинаково и каждый содержит последовательно соединенные двенадцатый блок ввода коэффициентов 68 (БВК12) (фиг. 9), шестнадцатый блок умножения 69 (БУ16) и шестнадцатый блок суммирования 70 (БС16), к которому подключен тринадцатый блок ввода коэффициентов 71 (БВК13). К шестнадцатому блоку умножения 69 (БУ16) подключен четырнадцатый блок ввода коэффициентов 72 (БВК14).
В первом блоке вычисления сопротивления обмотки статора 23 (БВСС1) шестнадцатый блок суммирования 70 (БС16) подключен к третьему блоку умножения 22 (БУ3).
Во втором блоке вычисления сопротивления обмотки статора 53 (БВСС2) шестнадцатый блок суммирования 70 (БС16) подключен к одиннадцатому блоку умножения 52 (БУ11).
В качестве датчика напряжения может быть использован трансформатор напряжения, датчика тока - трансформатор тока, датчика температуры - позистор, датчика частоты - частотомер. Другие блоки могут быть реализованы стандартными аппаратными средствами на основе интегральных микросхем либо с использованием микропроцессорных комплектов.
Способ осуществляют следующим образом.
Для определения угловой скорости вращения трехфазного асинхронного электродвигателя и получения результатов были проведены имитационные эксперименты для трехфазных асинхронных электродвигателей общепромышленного исполнения, например 4А50А4.
Для определения угловой скорости вращения трехфазного асинхронного электродвигателя с источника питания 1 (ИП) (фиг. 1) подали напряжение на трехфазный асинхронный электродвигатель 4, измерили мгновенные значения ia, ib фазных токов на фазах А и В с помощью датчиков тока 2 (ДТ1) и 5 (ДТ2), измерили мгновенные значения фазных напряжений ua, ub датчиками напряжения 3 (ДН 1) и 6 (ДН2), датчиком температуры 8 (ДТЕ) измерили температуру
проводников обмотки статора трехфазного асинхронного электродвигателя, датчиком частоты 9 (ДЧ) измерили частоту f основной гармоники напряжения статора трехфазного асинхронного электродвигателя.
Измеренные значения подали на блок вычисления угловой скорости вращения 7 (БВУСВ).
Для вычисления динамической составляющей относительного значения угловой скорости  с первого датчика тока 2 (ДТ1) измеренный фазный ток ia фазы А подали на выход второго блока суммирования 17 (БС17) и на блок дифференцирования 24 (БД). В третьем блоке суммирования 20 (БС3) происходит процесс суммирования поданных на него сигналов, а на блоке дифференцирования 24 (БД) - дифференцирование. С первого датчика напряжения 3 (ДН1) измеренное фазное напряжение ua фазы А подали на третий блок суммирования 20 (БС3).
с первого датчика тока 2 (ДТ1) измеренный фазный ток ia фазы А подали на выход второго блока суммирования 17 (БС17) и на блок дифференцирования 24 (БД). В третьем блоке суммирования 20 (БС3) происходит процесс суммирования поданных на него сигналов, а на блоке дифференцирования 24 (БД) - дифференцирование. С первого датчика напряжения 3 (ДН1) измеренное фазное напряжение ua фазы А подали на третий блок суммирования 20 (БС3).
С датчика температуры 8 (ДТЕ) измеренную температуру  подали на четырнадцатый блок суммирования 58 (БС14), сигнал с которого и сигнал с восьмого блока ввода коэффициентов 63 (БВК8) подали на тринадцатый блок умножения 59 (БУ13), где происходило умножение поданных на него сигналов. С тринадцатого блока умножения 59 (БУ13) подали сигнал на пятнадцатый блок суммирования 60 (БС15), на который также подали сигнал с девятого блока ввода коэффициентов 64 (БВК9). В пятнадцатом блоке суммирования 60 (БС15) происходило суммирование поданных на него сигналов. Полученный сигнал в результате суммирования с пятнадцатого блока суммирования 60 (БС15) подали на четырнадцатый блок умножения 61 (БУ14), на который также подали сигнал с десятого блока ввода коэффициентов 65 (БВК10). В четырнадцатом блоке умножения 61 (БУ14) происходит умножение сигналов, поступающих на его вход. С четырнадцатого блока умножения 61 (БУ14) сопротивление обмотки статора с учетом температурного коэффициента - z подали на второй блок суммирования 17 (БС2), причем величина z представлена в виде:
подали на четырнадцатый блок суммирования 58 (БС14), сигнал с которого и сигнал с восьмого блока ввода коэффициентов 63 (БВК8) подали на тринадцатый блок умножения 59 (БУ13), где происходило умножение поданных на него сигналов. С тринадцатого блока умножения 59 (БУ13) подали сигнал на пятнадцатый блок суммирования 60 (БС15), на который также подали сигнал с девятого блока ввода коэффициентов 64 (БВК9). В пятнадцатом блоке суммирования 60 (БС15) происходило суммирование поданных на него сигналов. Полученный сигнал в результате суммирования с пятнадцатого блока суммирования 60 (БС15) подали на четырнадцатый блок умножения 61 (БУ14), на который также подали сигнал с десятого блока ввода коэффициентов 65 (БВК10). В четырнадцатом блоке умножения 61 (БУ14) происходит умножение сигналов, поступающих на его вход. С четырнадцатого блока умножения 61 (БУ14) сопротивление обмотки статора с учетом температурного коэффициента - z подали на второй блок суммирования 17 (БС2), причем величина z представлена в виде:
 .
.
С пятого и шестого блоков ввода коэффициентов 56 (БВК5) и 57 (БВК6) на двенадцатый блок умножения 55 (БУ12) подали сигналы. В двенадцатом блоке умножения 55 (БУ12) происходит умножение сигналов, поступающих на его вход. Получили сопротивление приведенной обмотки ротора с учетом коэффициента
-  , которое подали на второй блок суммирования 17 (БС2), причем величина
представлена в виде:
, которое подали на второй блок суммирования 17 (БС2), причем величина
представлена в виде:
 .
.
Во втором блоке суммирования 17 (БС2) происходит суммирование сигналов, поступающих на его вход.
Сигнал с блока суммирования 17 (БС2) подали на третий блок суммирования 20 (БС3), с которого сигнал подали на второй блок умножения 21 (БУ2).
С двенадцатого блока ввода коэффициентов 68 (БВК12) и с четырнадцатого блока ввода коэффициентов 72 (БВК14) сигналы поступили на шестнадцатый блок умножения 69 (БУ16), где происходило умножение входных сигналов. С шестнадцатого блока умножения 69 (БУ16) и с тринадцатого блока ввода коэффициентов 71 (БВК13) сигналы подали на шестнадцатый блок суммирования 70 (БС16), где суммировали сигналы, поступающие на его вход.
На выходе шестнадцатого блока суммирования 70 (БС16) получили индуктивное сопротивление с учетом коэффициента
-  :
:
 .
.
С выхода шестнадцатого блока суммирования 70 (БС16) сигнал  подали на третий блок умножения 22 (БУ3). С третьего блока умножения 22 (БУ3) сигнал подали на второй блок умножения 21 (БУ2). С блока дифференцирования 24 (БД) подали сигнал на третий блок умножения 22 (БУ3). В блоках умножения 21 (БУ2) и 22 (БУ3) происходило умножение сигналов, поступающих на их вход.
подали на третий блок умножения 22 (БУ3). С третьего блока умножения 22 (БУ3) сигнал подали на второй блок умножения 21 (БУ2). С блока дифференцирования 24 (БД) подали сигнал на третий блок умножения 22 (БУ3). В блоках умножения 21 (БУ2) и 22 (БУ3) происходило умножение сигналов, поступающих на их вход.
В результате на выходе второго блока умножения 21(БУ2) получили вычисленное значение динамической дифференциальной составляющей относительного значения угловой скорости
:
 .
.
Для вычисления динамической интегральной составляющей относительного значения угловой скорости
с первого датчика тока 2 (ДТ1) измеренный фазный ток ia фазы А подали на выход второго блока вычисления сопротивления обмотки статора с учетом температурного коэффициента 30 (БВСОС1) и на четвертый блок умножения 27 (БУ4). С первого датчика напряжения 3 (ДН1) измеренное фазное напряжение ua фазы А подали на шестой блок суммирования 31 (БС6) и пятый блок суммирования 28 (БС5).
С датчика температуры 8 (ДТЕ) измеренную температуру
подали на четырнадцатый блок суммирования 58 (БС14), сигнал с которого и сигнал с восьмого блока ввода коэффициентов 63 (БВК8) подали на тринадцатый блок умножения 59 (БУ13), где происходило умножение поданных на него сигналов. С тринадцатого блока умножения 59 (БУ13) подали сигнал на пятнадцатый блок суммирования 60 (БС15), на который также подали сигнал с девятого блока ввода коэффициентов 64 (БВК9). В пятнадцатом блоке суммирования 60 (БС15) происходило суммирование поданных на него сигналов. Полученный сигнал в результате суммирования с пятнадцатого блока суммирования 60 (БС15) подали на четырнадцатый блок умножения 61 (БУ14), на который также подали сигнал с десятого блока ввода коэффициентов 65 (БВК10). В четырнадцатом блоке умножения 61 (БУ14) происходит умножение сигналов, поступающих на его вход. С четырнадцатого блока умножения 61 (БУ14) сигнал z подали на шестой блок суммирования 31 (БС6) и на четвертый блок суммирования 26 (БС4).
С пятого и шестого блоков ввода коэффициентов 56 (БВК5) и 57 (БВК6) на двенадцатый блок умножения 55 (БУ12) подали сигналы. В двенадцатом блоке умножения 55 (БУ12) происходит умножение сигналов, поступающих на его вход. Получили сигнал
, который подали на четвертый блок суммирования 26 (БС4).
С одиннадцатого блока ввода коэффициентов 67 (БВК11) и с датчика частоты 9 (ДЧ) измеренное значение частоты основной гармоники напряжения питания трехфазного асинхронного электродвигателя f подали на пятнадцатый блок умножения 66 (БУ15). С пятнадцатого блока умножения 66 (БУ15) сигнал поступил на первый блок интегрирования 32 (БИН1), на который подали также сигнал с шестого блока суммирования 31 (БС6).
Со второго блока ввода коэффициентов 34 (БВК2) подали сигнал на пятый блок умножения 29 (БУ5), на который подали сигналы с первого блока интегрирования 32 (БИН1) и с пятого блока суммирования 28 (БС5). С четвертого блока суммирования 26 (БС4) сигнал подали на четвертый блок умножения (БУ4), полученный на выходе его сигнал подали на пятый блок суммирования 28 (БС5).
В блоках суммирования 26 (БС4), 28 (БС5) и 31 (БС6) происходило суммирование сигналов, поступающих на их вход.
В блоках умножения 27 (БУ4) и 29 (БУ5) происходило умножение сигналов поступающих на их вход.
В первом блоке интегрирования 32 (БИН1) происходит интегрирование в пределах от 0 до  .
.
В результате с выхода пятого блока умножения 29 (БУ5) получили динамическую интегральную составляющую относительного значения угловой скорости  :
:
 .
.
Вычисленные значения динамической дифференциальной составляющей относительного значения угловой скорости
со второго блока умножения 21(БУ2) и динамической интегральной составляющей относительного значения угловой скорости с пятого блока умножения 29 (БУ5) и значения коэффициента с блока ввода коэффициентов 14 (БВК1) подали на первый блок суммирования 11 (БС1), где происходило их суммирование.
Для вычисления измеренного мгновенного значения угловой скорости (БВИМЗ)
с первого датчика тока 2 (ДТ1) измеренный фазный ток ia фазы А подали на шестой блок умножения 37 (БУ6), на девятый блок суммирования 45 (БС9) и на тринадцатый блок суммирования 51 (БС13). С датчика тока 5 (ДТ2) измеренный фазный ток ib фазы В подали на девятый блок умножения 44 (БУ9) и на тринадцатый блок суммирования 51 (БС13). С первого датчика напряжения 3 (ДН1) измеренное фазное напряжение ua фазы А подали на восьмой блок суммирования 38 (БС8) и на двенадцатый блок сложения 50 (БС12). Со второго датчика напряжения 6 (ДН2) измеренное фазное напряжение ub фазы В подали на десятый блок умножения 49 (БС10).
С датчика температуры 8 (ДТЕ) измеренную температуру
подали на четырнадцатый блок суммирования 58 (БС14), сигнал с которого и сигнал с восьмого блока ввода коэффициентов 63 (БВК8) подали на тринадцатый блок умножения 59 (БУ13), где происходило умножение поданных на него сигналов. С тринадцатого блока умножения 59 (БУ13) подали сигнал на пятнадцатый блок суммирования 60 (БС15), на который также подали сигнал с девятого блока ввода коэффициентов 64 (БВК9). В пятнадцатом блоке суммирования 60 (БС15) происходило суммирование поданных на него сигналов. Полученный сигнал в результате суммирования с пятнадцатого блока суммирования 60 (БС15) подали на четырнадцатый блок умножения 61 (БУ14), на который также подали сигнал с десятого блока ввода коэффициентов 63 (БВК10). В четырнадцатом блоке умножения 61 (БУ14) происходит умножение сигналов, поступающих на его вход. С четырнадцатого блока умножения 61 (БУ14) сопротивление обмотки статора с учетом температурного коэффициента - z подали на седьмой блок суммирования 36 (БС7) и на восьмой блок умножения 41(БУ8).
С пятого и шестого блоков ввода коэффициентов 56 (БВК5) и 57 (БВК6) на двенадцатый блок умножения 55 (БУ12) подали сигналы. В двенадцатом блоке умножения 55 (БУ12) происходит умножение сигналов, поступающих на его вход. Получили сигнал
, который подали на седьмой блок суммирования 36 (БС7).
С двенадцатого блока ввода коэффициентов 68 (БВК12) и с четырнадцатого блока ввода коэффициентов 72 (БВК14) сигналы поступили на шестнадцатый блок умножения 69 (БУ16), где происходило умножение входных сигналов. С шестнадцатого блока умножения 69 (БУ16) и с тринадцатого блока ввода коэффициентов 71 (БВК13) сигналы подали на шестнадцатый блок суммирования 70 (БС16), где суммировали сигналы, поступающие на его вход.
На выходе шестнадцатого блока суммирования 70 (БС16) получили величину
. С выхода блока суммирования 70 (БС16) сигнал подали на одиннадцатый блок умножения 52 (БУ11).
С одиннадцатого блока ввода коэффициентов 67 (БВК11) и с датчика частоты 9 (ДЧ) измеренное значение частоты основной гармоники напряжения питания трехфазного асинхронного электродвигателя f подали на пятнадцатый блок умножения 66 (БУ15). С пятнадцатого блока умножения 66 (БУ15) и с десятого блока суммирования 46 (БС10) сигнал подали на второй блок интегрирования 47 (БИН2).
Сигнал с выхода седьмого блока суммирования 36 (БС7) подали на шестой блок умножения 37 (БУ6), затем на восьмой блок суммирования 38 (БС8). На выходе сигнал с блока 38 (БС8) подали на третий блок ввода коэффициентов 39 (БВК3), сигнал с которого подали на седьмой блок умножения 40 (БУ7).
С четвертого блока ввода коэффициентов 43 (БВК4) подали сигнал на девятый блок умножения 44 (БУ9) и на десятый блок умножения 49 (БУ10), сигнал с которого подали на двенадцатый блок суммирования 50 (БС12). С выхода блока суммирования 50 (БС12) сигнал подали на десятый блок суммирования 46 (БС10).
Сигнал с девятого блока умножения 44 (БУ9) подали на девятый блок суммирования 45 (БС9). С блока суммирования 45 (БС9) сигнал подали на восьмой блок умножения 41 (БУ8), с блока умножения 41 (БУ8) на десятый блок суммирования 46 (БС10).
С тринадцатого блока суммирования 51 (БС13) сигнал подали на одиннадцатый блок умножения 52 (БУ11). С одиннадцатого блока умножения 52 (БУ11) и со второго блока интегрирования 47 (БИН2) подали сигнал на одиннадцатый блок суммирования 48 (БС11), с выхода которого подали на седьмой блок умножения 40 (БУ7).
В блоках суммирования 36 (БС7), 38 (БС8), 45 (БС9), 46 (БС10), 48 (БС11), 50 (БС12), 51 (БС13) происходило суммирование сигналов, поступающих на их вход.
В блоках умножения 37 (БУ6), 40 (БУ7), 41 (БУ8), 44 (БУ9), 49 (БУ10), 52 (БУ11) происходило умножение сигналов, поступающих на их вход.
Во втором блоке интегрирования 47 (БИН2) происходило интегрирование в пределах от 0 до
.
В результате на выходе седьмого блока умножения 40 (БУ7) получили измеренное мгновенное значение угловой скорости  :
:
 .
.
Вычисленное значение измеренного мгновенного значения угловой скорости
с седьмого блока умножения 40 (БУ7) и сигнал с первого блока суммирования 11 (БС1) подали на первый блок умножения 15 (БУ1), в котором определили угловую скорость вращения трехфазного асинхронного электродвигателя в следующем виде:
 .
.
Полученный сигнал с блока умножения 15 (БУ1), пропорциональный угловой скорости трехфазного асинхронного электродвигателя,  , вывели на блок индикации 10 (БИ) в цифровом виде или в виде графика.
, вывели на блок индикации 10 (БИ) в цифровом виде или в виде графика.
В результате имитационного моделирования, которое основано на сравнении и анализе графиков угловой скорости вращения трехфазного асинхронного электродвигателя, были рассмотрены графики, полученные по способу-прототипу и по предложенному способу (фиг. 10). При моделировании был принят режим пуска асинхронного электродвигателя как наиболее тяжелый, при котором параметры изменяются в широких пределах. Были приняты нулевые начальные условия, кроме того, принято: время начала моделирования t0=0; время окончания моделирования tк=50/314 с; шаг интегрирования ∆ t=0,001/314 с.
Кривая 1 является характеристикой угловой скорости вращения по способу-прототипу
(фиг. 10), кривая 2 является характеристикой угловой скорости вращения по предложенному способу
. Точность измерения угловой скорости вращения трехфазного асинхронного электродвигателя по способу-прототипу составляет 94-95%, а по предложенному способу составляет 96-97%.







Способ количественного определения молочной кислоты методом вольтамперометрии на стеклоуглеродном электроде
Способ разрушения многокомпонентных изделий
Способ определения глутатиона в модельных водных растворах методом циклической вольтамперометрии на графитовом электроде, модицифированном коллоидными частицами золота
Устройство для определения амплитудно-частотных и фазочастотных характеристик токовых шунтов
Устройство для защиты двух параллельных линий
Способ улавливания и локализации летучих форм радиоактивного йода из газообразных выбросов
Способ генерации ускоренных позитронов
Комплекс для проверки скважинных инклинометров на месторождении
Способ определения равновесности химического состава болотных вод от их гидродинамических условий
Способ визуализации ультразвуковой дефектоскопии трехмерного изделия
Цеолитсодержащий катализатор, способ его получения и способ превращения прямогонной бензиновой фракции в высокооктановый компонент бензина с низким содержанием бензола
Способ получения поливинилацетатной дисперсии
Способ определения платины в водных растворах методом хронопотенциометрии
Способ определения золота в водных растворах методом хронопотенциометрии
Устройство для моделирования статического синхронного компенсатора
Материал для поглощения электромагнитных волн
Способ определения оптимальной скорости резания
Устройство для разбраковки металлических изделий
Способ определения таллия в водных растворах методом хронопотенциометрии
Способ диагностики состояния асинхронного электродвигателя

