Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ АППАРАТОМ ВОЗДУШНОГО ОХЛАЖДЕНИЯ МАСЛА
Вид РИД
Изобретение
Изобретение относится к аппаратам воздушного охлаждения (АВО) и, в частности, может использоваться для охлаждения масла газоперекачивающих агрегатов.
Наиболее близкой по технической сущности является система управления аппаратом воздушного охлаждения масла (см. Россеев Н.Н. Создание энергоэффективной системы автоматического управления аппаратами воздушного охлаждения масла на основе частотно-регулируемого электропривода // Диссертация на соискание ученой степени кандидата технических наук. - Самара: Самарский государственный технический университет, 2006. - С.60 - 72), содержащая блок задания температуры, пропорционально-интегрально-дифференциальный регулятор, частотный преобразователь, асинхронный двигатель, вентилятор, теплообменник и датчик температуры.
Недостаток наиболее близкой по технической сущности системы управления аппаратом воздушного охлаждения масла заключается в том, что при изменении температуры охлаждающего воздуха в широких пределах она требует перенастройки регуляторов.
Сущность изобретения состоит в том, что система управления аппаратом воздушного охлаждения масла, содержащая блок задания температуры, пропорционально-интегральный регулятор, частотный преобразователь, асинхронный двигатель, вентилятор, теплообменник и датчик температуры, причем выход блока задания температуры соединен с первым входом пропорционально-интегрального регулятора, выход которого соединен с входом частотного преобразователя, выход частотного преобразователя соединен с асинхронным двигателем, кинематически связанным с вентилятором, вентилятор воздействует потоком воздуха на теплообменник, оснащенный датчиком температуры, дополнительно снабжена блоком форсирования, причем выход датчика температуры соединен с входом блока форсирования, выход которого соединен с вторым входом пропорционально-интегрального регулятора.
Существенные отличия находят свое выражение в новой совокупности связей между элементами устройства. Указанная совокупность связей позволяет обеспечить работу системы управления аппаратом воздушного охлаждения масла без перенастройки регуляторов.
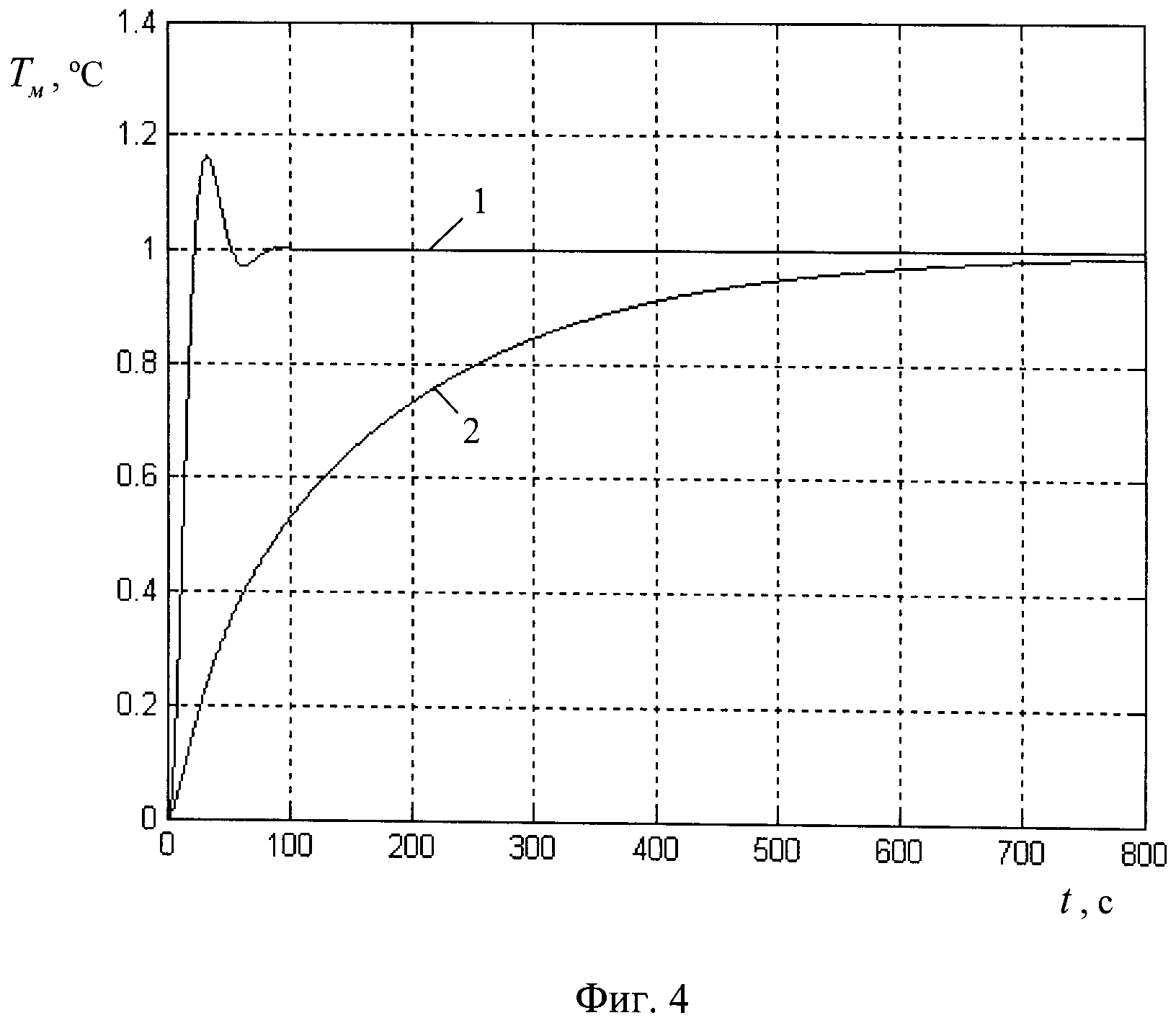
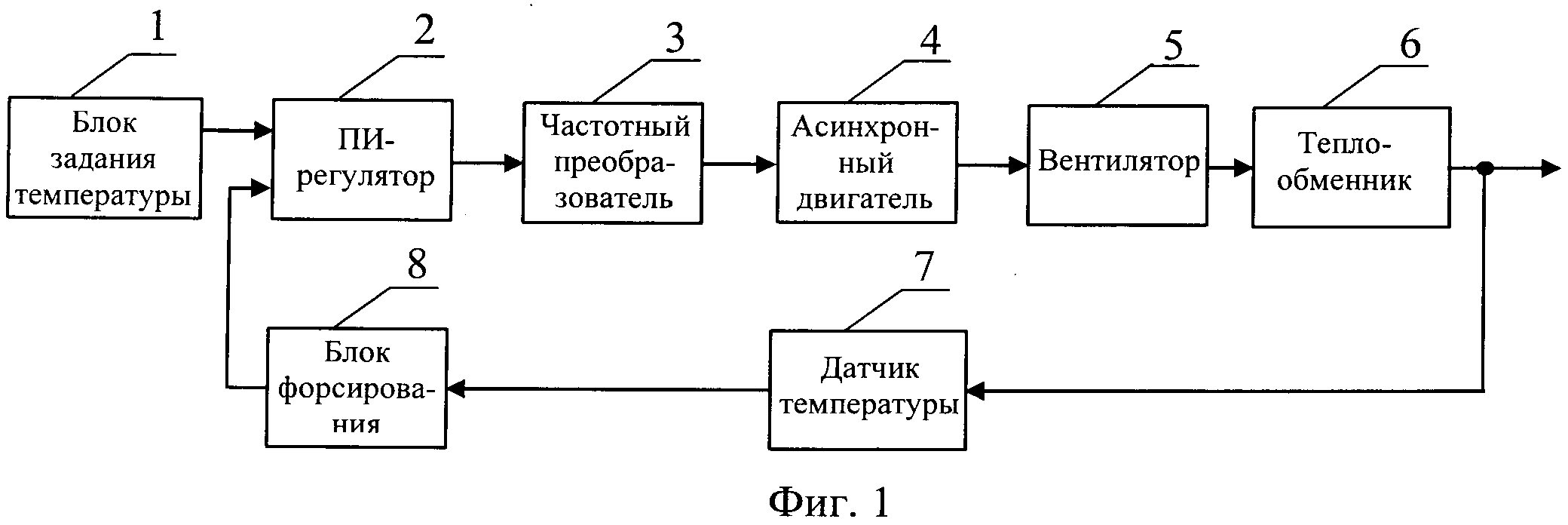
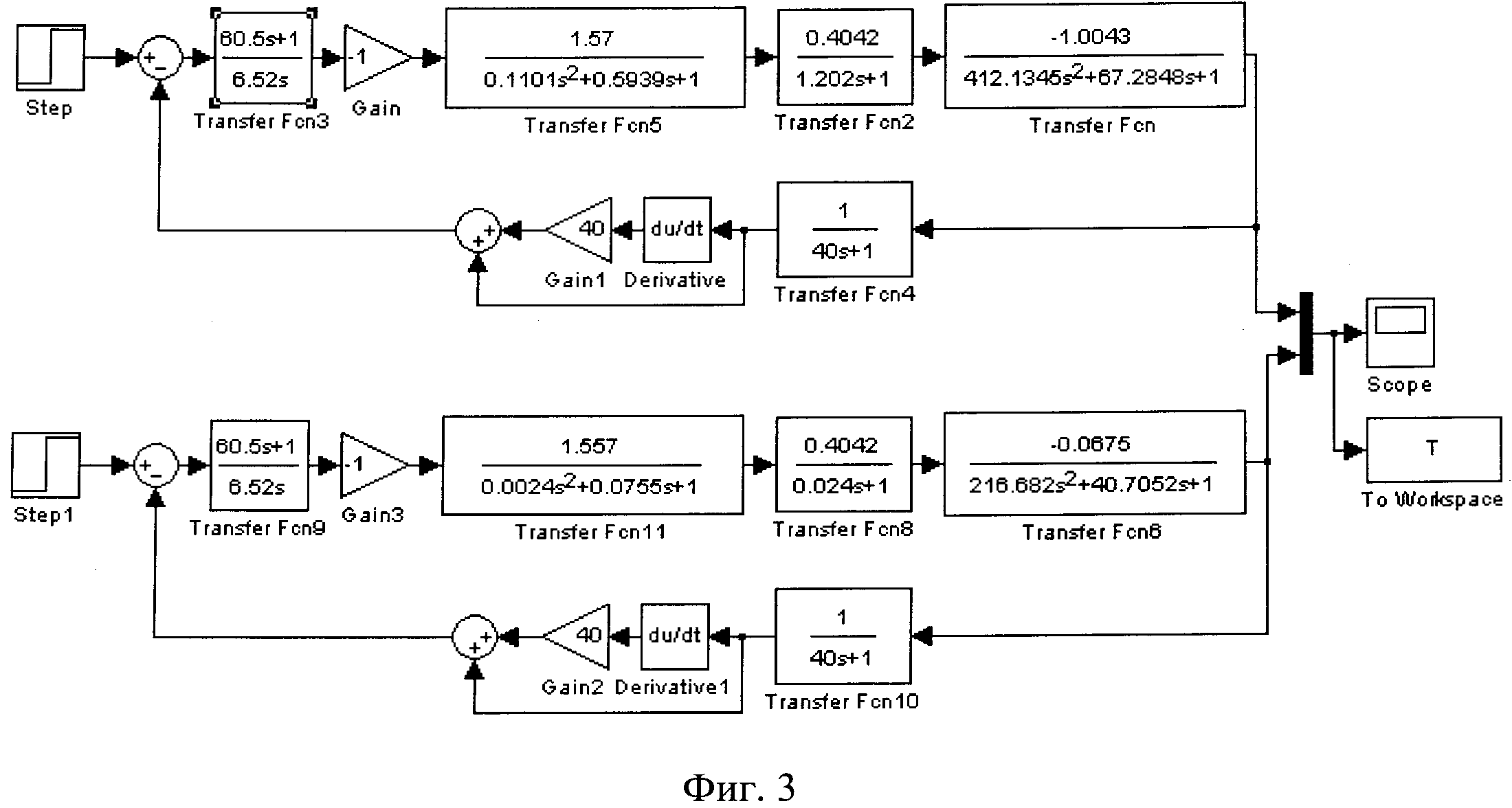
На фиг.1 приведена функциональная системы управления аппаратом воздушного охлаждения масла; на фиг.2 - структурная схема системы управления аппаратом воздушного охлаждения масла; на фиг.3 - расчетная модель системы управления аппаратом воздушного охлаждения масла; на фиг.4 - переходные процессы по управляющему воздействию.
Система управления аппаратом воздушного охлаждения масла (фиг.1) содержит блок 1 задания температуры, пропорционально-интегральный регулятор 2, частотный преобразователь 3, асинхронный двигатель 4, вентилятор 5, теплообменник 6, датчик 7 температуры, блок 8 форсирования.
Выход блока 1 задания соединен с первым входом пропорционально-интегрального регулятора 2, выход которого соединен с входом частотного преобразователя 3. Выход частотного преобразователя 3 соединен с асинхронным двигателем 4, кинематически связанным с вентилятором 5. Вентилятор 5 воздействует потоком воздуха на теплообменник 6, оснащенный датчиком 7 температуры. Выход датчика 7 температуры соединен с входом блока 8 дифференцирования, выход которого соединен с вторым входом пропорционально-интегрального регулятора 2.
Блок 1 задания параметров, пропорционально-интегральный регулятор 2, частотный преобразователь 3 и блок 8 форсирования могут быть реализованы, например, на частотном преобразователе MICROMASTER 430 фирмы Siemens с помощью его внутренних функциональных возможностей и BICO-технологии программирования. В частности, параметром Р2200 может быть разрешено использование, например, технологического регулятора. Параметрами Р2201 и Р2253 формируется фиксированное задание регулятору, параметром Р2264 -источник обратной связи для технологического регулятора, например, аналоговый вход. Параметром Р2280 задается коэффициент усиления, а параметром Р2285 - постоянная времени пропорционально-интегрального регулятора 2. Параметром Р2263 выбирается тип технологического регулятора, позволяющий применение блока 8 форсирования в цепи обратной связи, параметром Р2271 - тип обратной связи. Параметр Р2274 определяет величину постоянной времени блока 8 форсирования. Следует отметить, что блок 1 задания параметров, пропорционально-интегральный регулятор 2 и блок 8 форсирования могут быть реализованы также программно на микропроцессорном контроллере. В качестве асинхронного двигателя 4 может быть взят, например, двигатель 4А132М8УЗ, применяемый в аппаратах воздушного охлаждения масла. Вентилятор 5 представляет собой, например, рабочее колесо ГАЦ-12,4-6, закрепленное на валу асинхронного двигателя 4. Теплообменник 6 может быть реализован, например, аналогично теплообменнику венгерского производства типа 06-10. В качестве датчика 7 температуры, например, может быть использован датчик КОРУНД-ТМ-01-2. Он устанавливается на выходе теплообменника.
Система управления аппаратом воздушного охлаждения масла работает следующим образом. В соответствии с величиной задающего сигнала, поступающего с выхода блока 1 задания температуры, и сигнала с датчика 7 температуры блок 8 форсирования в совокупности с пропорционально-интегральным регулятором 2 формируют сигнал на входе частотного преобразователя 3. Частотный преобразователь 3 преобразует этот сигнал в напряжение определенной амплитуды и частоты на статорных обмотках асинхронного двигателя 4. При этом вал асинхронного двигателя 4 начинает вращаться и приводит в движение вентилятор 5, который воздействует на теплообменник 6 потоком охлаждающего воздуха. Изменение скорости вращения асинхронного двигателя 4 и, следовательно, вентилятора 5 продолжается до тех пор, пока величина сигнала с блока 8 форсирования не сравняется с величиной сигнала на выходе блока 1 задания. В результате температура масла на выходе теплообменника 6 стабилизируется на заданном уровне и наблюдается тепловой баланс между потоком воздуха и потоком масла в теплообменнике при требуемой величине температуры.
Пропорционально-интегральный регулятор 2 предназначен для компенсации наибольшей инерционности теплообменника и всех помех, охваченных датчиком 7. Блок 8 форсирования выполняет функцию компенсации инерционности датчика 7 температуры. Корректный выбор параметров настройки пропорционально-интегрального регулятора 2 обеспечивает устойчивый режим работы системы управления и требуемую точность поддержания температуры масла на выходе аппарата воздушного охлаждения при любой температуре окружающего воздуха.
Для подтверждения последнего утверждения рассмотрим структурную схему предлагаемой системы управления аппарата воздушного охлаждения масла (фиг.2). Она содержит пропорционально-интегральный регулятор с передаточной функцией

где kп и Tи - коэффициент передачи и постоянная времени пропорционально-интегрального регулятора, соответственно.
Знак минус в передаточной функции регулятора учитывает, что увеличение его сигнала приводит к уменьшению выходной величины.
Датчик температуры представлен передаточной функцией

где k∂T и Т∂T - коэффициент передачи и постоянная времени датчика, соответственно.
Передаточная функция блока форсирования имеет вид:

где постоянная времени выбирается равной

На структурной схеме также изображена передаточная функция процесса теплообмена по отношению к управляющему воздействию - объемному расходу воздуха Gв(p)

где
 ;
;
 ;
;
 ;
;
Gм и Gв - объемные расходы масла и воздуха; ρв и ρм - плотности воздуха и масла; mм и mтр - массы масла и трубки теплообменника; Cв, Cм и Cтр - удельные теплоемкости воздуха, масла и материла трубки теплообменника, соответственно; αв и αм - коэффициенты конвективного теплообмена от стенки трубки к воздуху и от масла к стенки трубки, соответственно; Fвн и Fнар - внутренняя и наружная площади теплообмена; Тм и Тв - средние значения температур масла и воздуха на выходе аппарата воздушного охлаждения; Тв.вх - среднее значение температуры воздуха на входе аппарата воздушного охлаждения; Gв0, Tв0 и Tв.вх0 - начальные условия.
Анализ корней знаменателя (5) показывает, что эту передаточную функцию можно записать в виде двойного апериодического звена

где  ;
; , причем будем считать, что T22≥Т11.
, причем будем считать, что T22≥Т11.
Передаточная функция вентилятора совместно с воздуховодом представлена апериодическим звеном

с переменными коэффициентом передачи  и постоянной времени
и постоянной времени  , где а, b и с - коэффициенты аэродинамической характеристики вентилятора; lв и Sв - длина и площадь поперечного сечения воздуховода; ω00 - начальное значение скорости вращения вентилятора.
, где а, b и с - коэффициенты аэродинамической характеристики вентилятора; lв и Sв - длина и площадь поперечного сечения воздуховода; ω00 - начальное значение скорости вращения вентилятора.
Передаточная функция асинхронного двигателя представлена динамическим звеном второго порядка

где величины коэффициентов а00 и а10 зависят от параметров схемы замещения двигателя, частоты питающего напряжения и закона регулирования амплитуды напряжения в функции частоты.
Частотный преобразователь на структурной схеме представлен безынерционным звеном с коэффициентом передачи kсп, поскольку его инерционностью по сравнению с инерционностью теплообменника можно пренебречь.
Параметры настройки пропорционально-интегрального регулятора выбираются таким образом, чтобы выполнялось равенство

Формула (9) имеет две степени свободы. Поэтому, задаваясь величиной постоянной времени Ти, например, из соотношения:

можно найти требуемое значение кп:

В соответствии с выражениями (1)-(11) посчитаны передаточные функции всех элементов системы управления АВО масла с асинхронным двигателем 4А132М8У3, рабочим колесом вентилятора ГАЦ-12,4-6, при параметрах теплообменника: Gм=0,0166 м3/с; ρм=843 кг/м3; См=1670 Дж/кгК; Стр=460 Дж/кгК; Св=1005 Дж/кгК; mм=434 кг; mтр=1544 кг; αм=286 Вт/м2К; Fвн=144 м2; Fнар=1135 м2. Передаточные функции найдены для двух режимов.
В первом режиме приняты начальные условия Gв0=0,54 м3/с; Тв.вх=-30°С; Tв0=9,089°С; αв=0,504 Вт/м2К; ρв=1,452 кг/м3. При этом передаточные функции элементов системы управления принимают следующие численные значения:
 ;
;
 ;
;  .
.
Во втором режиме приняты начальные условия: Gв0=27,2 м3/с; Tв.вх0=40°С; Тв0=45,923°С; αв=23 Вт/м2К; ρв=1,118 кг/м3. При этом передаточные функции элементов системы управления принимают следующие численные значения:
 ;
;
 ;
;  .
.
Коэффициент передачи частотного преобразователя принципиально равен kсп=1. Датчик температуры, установленного в АВО масла, характеризуется постоянной времени T∂Т=40 с. Поскольку задающий сигнал в системе управления формируется в тех же величинах, что и выходная величина, то коэффициент передачи датчика температуры T∂Т=1.
Параметры регуляторов рассчитываются для второго режима: Tи=6,52 с; kп=9,28; Тф=40 с.
В соответствии с полученными передаточными функциями в программной среде «Matlab Simulink» разработана расчетная модель системы управления АВО масла (фиг.3). Расчетная модель позволяет провести исследование системы управления АВО масла по отношению к управляющему воздействию Tз с учетом вариации параметров объекта управления. При настройках регуляторов, выбранных для режима Тв.вх=-30°С, Gв0=0,54 м3/с, одновременно моделирование ведется для противоположного случая с начальными условиями Tв.вх=40°С, Gg0=27,2 м3/с.
Анализ графиков, приведенных на фиг.4, показывает, что разработанная система управления обеспечивает работоспособность АВО масла во всем возможном диапазоне изменения параметров объекта управления. Кривая 1 соответствует начальным условиям Tв.вх=-30°С, Gв0=0,54 м3/с, а кривая 2 - Tв.вх=40°С, Gв0=27,2 м3/с. При этом время переходного процесса варьируется в пределах tпп=71÷667 с.
Таким образом, предлагаемая система управления аппаратом воздушного охлаждения масла позволяет обеспечить работу без перенастройки регуляторов.
Система управления аппаратом воздушного охлаждения масла, содержащая блок задания температуры, пропорционально-интегральный регулятор, частотный преобразователь, асинхронный двигатель, вентилятор, теплообменник и датчик температуры, причем выход блока задания температуры соединен с первым входом пропорционально-интегрального регулятора, выход которого соединен с входом частотного преобразователя, выход частотного преобразователя соединен с асинхронным двигателем, кинематически связанным с вентилятором, вентилятор воздействует потоком воздуха на теплообменник, оснащенный датчиком температуры, отличающаяся тем, что она дополнительно снабжена блоком форсирования, причем выход датчика температуры соединен с входом блока форсирования, выход которого соединен с вторым входом пропорционально-интегрального регулятора.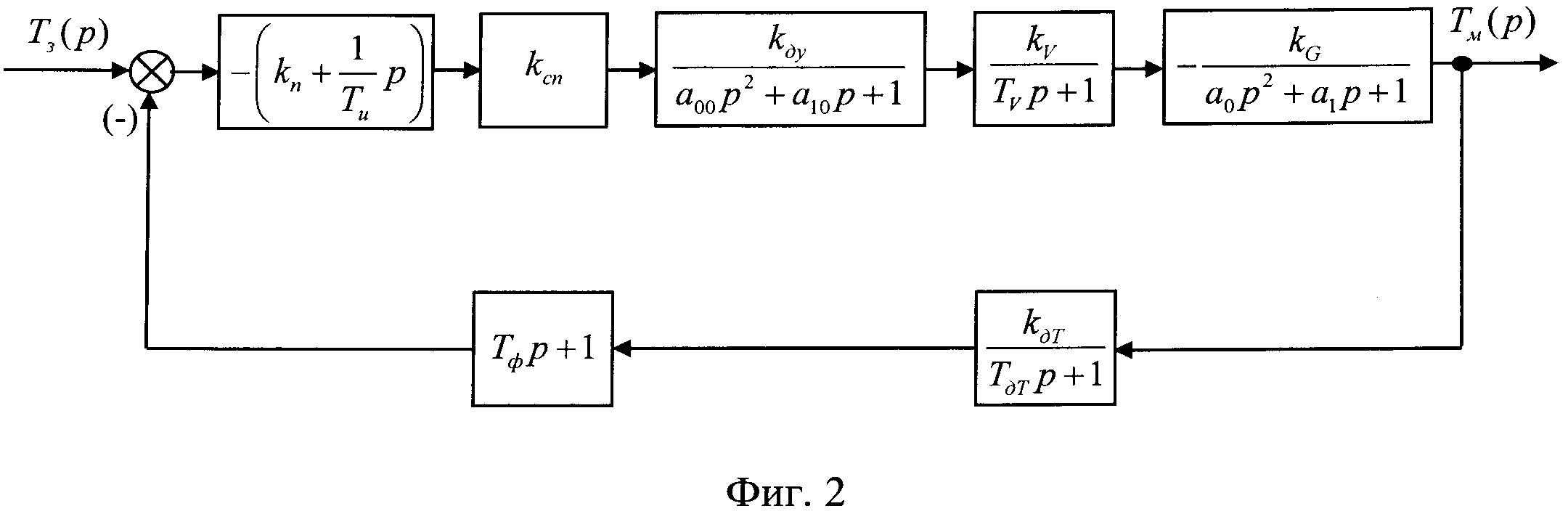
Следящий электропривод с асинхронным исполнительным двигателем
Цифровой модулятор для силового преобразователя электромагнитного подшипника
Цифровой широтно-импульсный модулятор
Система управления погружным электроцентробежным насосом и кустовой насосной станцией
Система управления погружным электроцентробежным насосом
Следящий электропривод
Следящий электропривод с асинхронным исполнительным двигателем
Цифровой модулятор для преобразования частоты
Устройство для измерения параметров срабатывания капсюля-детонатора с ударно-волновой трубкой
Способ утилизации баллиститных ракетных топлив
Система управления электромагнитным подвесом ротора
Способ получения дисперсно-упрочненных материалов при динамическом нагружении
Состав и способ приготовления носителя и катализатора глубокой гидроочистки углеводородного сырья
Цифровой регулятор для системы управления электромагнитным подшипником
Следящий электропривод с асинхронным исполнительным двигателем

