Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к области автоматического управления динамическими объектами (ДО), которое обеспечивает их точное движение по заданной траектории, в частности летательными и/или подводными аппаратами.
Известно устройство для управления приводом робота, содержащее последовательно соединенные первый и второй сумматоры, первый блок умножения, третий сумматор, усилитель и двигатель, связанный с первым датчиком скорости непосредственно и через редуктор - с первым датчиком положения, выход которого соединен с первым положительным входом первого сумматора, подключенного вторым входом к входу устройства, последовательно соединенные релейный блок и четвертый сумматор, второй положительный вход которого соединен с выходом первого датчика скорости и входом релейного блока, последовательно соединенные первый задатчик сигнала и пятый сумматор, второй положительный вход которого подключен к выходу датчика массы, а выход - ко второму входу первого блока умножения, последовательно соединенные второй датчик скорости, установленный в третьей степени подвижности робота, второй блок умножения и третий блок умножения, второй вход которого соединен с выходом первого датчика скорости, а выход - с третьим отрицательным входом четвертого сумматора, а также второй датчик положения, установленный в третьей степени подвижности робота, причем второй отрицательный вход второго сумматора соединен с выходом первого датчика скорости, а выход четвертого сумматора подключен ко второму положительному входу третьего сумматора, последовательно соединенные второй задатчик сигнала, шестой сумматор, четвертый блок умножения, второй вход которого через первый косинусный функциональный преобразователь соединен с выходом второго датчика положения, седьмой сумматор, второй положительный вход которого соединен с выходом третьего задатчика сигнала, и пятый блок умножения, второй вход которого соединен с выходом первого датчика ускорения, установленного в третьей степени подвижности робота, а выход подключен к четвертому положительному входу четвертого сумматора, последовательно соединенные второй синусный функциональный преобразователь, вход которого соединен со входом первого косинусного функционального преобразователя, и шестой блок умножения, второй вход которого подключен к выходу шестого сумматора, а выход - ко второму входу второго блока умножения, пятый отрицательный вход четвертого сумматора подключен к выходу седьмого блока умножения, первый вход которого соединен с выходом второго датчика скорости, а второй вход - с выходом второго блока умножения, третий положительный вход пятого сумматора соединен с выходом четвертого блока умножения, третий положительный вход седьмого сумматора подключен к выходу датчика массы и второму положительному входу шестого сумматора, последовательно соединенные восьмой сумматор, первый положительный вход которого подключен к выходу второго датчика положения, а его второй положительный вход - к выходу первого датчика положения, третий синусный функциональный преобразователь, восьмой блок умножения, девятый сумматор и девятый блок умножения, выход которого подключен к шестому положительному входу четвертого сумматора, а также второй датчик ускорения, установленный в первой степени подвижности робота, и последовательно соединенные четвертый задатчик сигнала, десятый сумматор, десятый блок умножения, второй вход которого через четвертый синусный функциональный преобразователь подключен к выходу первого датчика положения, а его выход - ко второму положительному входу девятого сумматора, последовательно соединенные пятый задатчик сигнала и одиннадцатый сумматор, второй положительный вход которого подключен к выходу датчика массы и ко второму положительному входу десятого сумматора, а его выход - ко второму положительному входу восьмого блока умножения, последовательно соединенные третий датчик ускорения, механически связанный с выходным валом двигателя, и одиннадцатый блок умножения, второй вход которого соединен с выходом второго блока умножения, а выход - с первым отрицательным входом двенадцатого сумматора, второй положительный вход которого подключен к выходу третьего датчика ускорения, а выход - к третьему положительному входу третьего сумматора, последовательно соединенные первый дифференциатор и двенадцатый блок умножения, второй вход которого соединен с выходом седьмого сумматора, а также тринадцатый блок умножения, первый вход которого подключен к выходу шестого блока умножения, второй вход - к выходу первого датчика ускорения и входу первого дифференциатора, а выход - к первому отрицательному входу тринадцатого сумматора, выход которого подключен к входу четырнадцатого блока умножения, последовательно соединенные квадратор, пятнадцатый блок умножения, второй вход которого соединен с выходом четвертого блока умножения, и шестнадцатый блок умножения, последовательно соединенные четырнадцатый сумматор, семнадцатый блок умножения и восемнадцатый блок умножения, второй вход которого подключен к выходу одиннадцатого сумматора, последовательно соединенные пятый косинусный функциональный преобразователь, вход которого соединен с выходом первого датчика положения, девятнадцатый блок умножения, второй вход которого подключен к выходу десятого сумматора, двадцатый блок умножения и двадцать первый блок умножения, второй вход которого соединен с выходом первого датчика скорости, первым положительным входом четырнадцатого сумматора и вторым входом четырнадцатого блока умножения, последовательно соединенные шестой косинусный функциональный преобразователь, подключенный вводом к выходу восьмого сумматора, и двадцать второй блок умножения, выход которого соединен со вторым входом семнадцатого блока умножения, последовательно соединенные второй дифференциатор, подключенный входом к выходу второго датчика ускорения, и двадцать третий блок умножения, второй вход которого соединен с выходом восьмого блока умножения, а также двадцать четвертый блок умножения, первый вход которого соединен с выходом десятого блока умножения, а его второй вход - с выходом второго дифференциатора, а выход - с третьим положительным входом двенадцатого сумматора, четвертый положительный вход которого подключен к выходу двадцать третьего блока умножения, пятый положительный вход - к выходу восемнадцатого блока умножения, шестой положительный вход - к выходу двадцать первого блока умножения, седьмой положительный вход - к выходу четырнадцатого блока умножения, восьмой отрицательный вход - к выходу шестнадцатого блока умножения, девятый положительный вход - к выходу двенадцатого блока умножения, а десятый отрицательный - к выходу двадцать пятого блока умножения, первый вход которого соединен с выходом тринадцатого блока умножения, а второй вход - с выходом второго датчика скорости, входом квадратора, вторым входом шестнадцатого блока умножения и вторым положительным входом четырнадцатого сумматора, причем второй отрицательный вход тринадцатого сумматора подключен к выходу пятнадцатого блока умножения, отличающееся тем, что в него дополнительно введены последовательно соединенные шестой задатчик сигнала и пятнадцатый сумматор, второй положительный вход которого подключен к выходу второго датчика ускорения, а выход - ко вторым входам девятого, двадцатого и двадцать второго блоков умножения (пат. РФ №2312007, БИ №4, 2007 г.).
Недостатком этого устройства является то, что оно не может обеспечить автоматический выбор максимально возможной скорости работы привода, а следовательно, и максимальную производительность этого устройства при сохранении заданной динамической точности его движения.
Известен также электропривод с автоматической подстройкой частоты входного гармонического сигнала, содержащий последовательно соединенные первый сумматор, корректирующее устройство, усилитель, двигатель, редуктор, датчик положения, выход которого соединен с первым входом первого сумматора, отличающийся тем, что в него дополнительно введены последовательно соединенные блок вычисления модуля, вход которого соединен с выходом первого сумматора, второй сумматор, релейный элемент, запоминающее устройство, информационный вход которого соединен с выходом блока вычисления модуля и через устройство задержки со вторым входом второго сумматора, третий сумматор, второй вход которого соединен с выходом первого задатчика сигнала, первый интегратор, фильтр низких частот второго порядка, четвертый сумматор, второй вход которого соединен с выходом второго задатчика сигнала, второй интегратор, синусный функциональный преобразователь, блок умножения, второй вход которого соединен с третьим задатчиком сигнала, а выход со вторым входом первого сумматора (пат. РФ №2399079, БИ №25, 2010 г.).
Недостатком этого устройства является то, что оно позволяет формировать только гармонический программный сигнал, обеспечивающий максимально возможную скорость движения ДО при сохранении допустимого значения динамической ошибки управления. Формирование другого вида программных сигналов в указанном устройстве невозможно. Кроме того, это устройство позволяет формировать программный сигнал только для одной степени свободы ДО, что не позволяет использовать его для управления движением этого ДО по пространственной траектории.
Задачей, на решение которой направлено заявленное техническое решение, является обеспечение максимально возможной скорости движения ДО по заданной пространственной траектории при сохранении допустимой величины отклонения от этой траектории.
Технический результат заявляемого решения выражается в формировании специального контура автоматического выбора максимально возможной скорости движения ДО вдоль заданной пространственной траектории и соответствующих программных сигналов этого движения (с использованием полученного значения максимально возможной скорости), при которых отклонение ДО от указанной траектории не превышает допустимой величины.
Поставленная задача решается тем, что в устройство для формирования программных сигналов управления пространственным движением динамических объектов, содержащее последовательно соединенные первый задатчик сигнала, первый сумматор, первый интегратор, дополнительно введены последовательно соединенные первый квадратор, второй сумматор, второй и третий входы которого подключены соответственно к выходам второго и третьего квадраторов, и первый блок извлечения квадратного корня, выход которого подключен ко второму входу первого сумматора, последовательно соединенные нелинейный элемент, первый блок умножения, второй вход которого подключен к выходу второго задатчика сигнала, первый блок деления, второй интегратор, первый функциональный преобразователь, вход которого подключен также к входам второго функционального преобразователя и первой следящей системы, к первому входу третьего сумматора, второй вход которого соединен с первым выходом навигационной системы, через третий функциональный преобразователь - к входу второй следящей системы и первому входу четвертого сумматора, второй вход которого соединен со вторым выходом навигационной системы, через четвертый функциональный преобразователь - к входу третьей следящей системы и к первому входу пятого сумматора, второй вход которого подключен к третьему выходу навигационной системы, четвертый квадратор, шестой сумматор, второй вход которого через пятый квадратор подключен к выходу второго функционального преобразователя, второй блок извлечения квадратного корня, второй блок деления, второй вход которого подключен к выходу третьего задатчика сигнала и третьему входу шестого сумматора, второй блок умножения, второй вход которого подключен к выходу первого функционального преобразователя, пятый функциональный преобразователь, вход которого подключен также к первым входам третьего, четвертого и пятого блоков умножения, а также к входу шестого квадратора, седьмой сумматор, третий блок деления, шестой блок умножения, восьмой сумматор, выход которого подключен к входу второго квадратора, причем выход второго блока извлечения квадратного корня подключен ко второму входу первого блока деления, последовательно соединенные седьмой блок умножения, первый вход которого подключен к выходу второго функционального преобразователя, шестой функциональный преобразователь, вход которого подключен также ко второму входу четвертого блока умножения, к первым входам восьмого и девятого блоков умножения, а также к входу седьмого квадратора, девятый сумматор, второй вход которого подключен к выходу пятого блока умножения, четвертый блок деления, второй вход которого подключен к третьему входу девятого сумматора, к вторым входам седьмого сумматора, третьего блока деления, третьего, седьмого и восьмого блоков умножения, а также к выходу второго блока деления, десятый блок умножения и десятый сумматор, выход которого подключен к входу третьего квадратора, последовательно соединенные одиннадцатый сумматор, одиннадцатый блок умножения, второй вход которого подключен к выходу третьего сумматора, а также к вторым входам шестого и десятого блоков умножения, двенадцатый сумматор, второй вход которого через двенадцатый блок умножения подключен к выходу восьмого блока умножения, его третий вход через тринадцатый блок умножения - к выходу третьего блока умножения, а выход - к входу второго квадратора, последовательно соединенные тринадцатый сумматор, первый вход которого подключен к выходу седьмого квадратора и первому входу одиннадцатого сумматора, а его второй вход - к выходу третьего задатчика сигнала и первому входу четырнадцатого сумматора, подключенного вторым входом к выходу шестого квадратора и к второму входу одиннадцатого сумматора, а выходом - к первому входу четырнадцатого блока умножения, выход которого соединен со вторым входом восьмого сумматора, третий вход которого через пятнадцатый блок умножения подключен к выходу пятого сумматора, к второму входу двенадцатого блока умножения и к первому входу шестнадцатого блока умножения, второй вход которого соединен с выходом тринадцатого сумматора, а выход - с вторым входом десятого сумматора, третий вход которого через семнадцатый блок умножения подключен к вторым входам тринадцатого и четырнадцатого блоков умножения, а также к выходу четвертого сумматора, причем второй вход семнадцатого блока умножения соединен со вторыми входами пятого, девятого и пятнадцатого блоков умножения, а также с выходом четвертого блока умножения, вход нелинейного элемента подключен к выходу первого интегратора, а третий вход седьмого сумматора - к выходу девятого блока умножения, а также последовательно соединенные восьмой квадратор, первый вход которого подключен к выходу четвертого сумматора, пятнадцатый сумматор, второй и третий входы которого через девятый и десятый квадраторы подключены, соответственно, к выходам третьего и пятого сумматоров, и третий блок извлечения квадратного корня, выход которого подключен к третьему входу первого сумматора.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствуют о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения позволяют обеспечить максимально возможную скорость движения ДО по заданной пространственной траектории без превышения предельно допустимой величины его отклонения от указанной траектории.
Блок-схема предлагаемого устройства для формирования программных сигналов управления пространственным движением динамических объектов представлена на фиг.1.
Устройство для формирования программных сигналов управления пространственным движением динамических объектов содержит последовательно соединенные первый квадратор 4, второй сумматор 5, второй и третий входы которого подключены, соответственно, к выходам второго 6 и третьего 7 квадраторов, и первый блок 8 извлечения квадратного корня, выход которого подключен ко второму входу первого сумматора 3, последовательно соединенные нелинейный элемент 9, первый блок 10 умножения, второй вход которого подключен к выходу второго задатчика 11 сигнала, первый блок 12 деления, второй интегратор 13, первый функциональный преобразователь 14, вход которого подключен также к входам второго функционального преобразователя 15 и первой следящей системы 16, к первому входу третьего сумматора 17, второй вход которого соединен с первым выходом навигационной системы 18, через третий функциональный преобразователь 19 - к входу второй следящей системы 20 и первому входу четвертого сумматора 21, второй вход которого соединен со вторым выходом навигационной системы 18, через четвертый функциональный преобразователь 22 - к входу третьей следящей системы 23 и к первому входу пятого сумматора 24, второй вход которого подключен к третьему выходу навигационной системы 18, четвертый квадратор 25, шестой сумматор 26, второй вход которого через пятый квадратор 27 подключен к выходу второго функционального преобразователя 15, второй блок 28 извлечения квадратного корня, второй блок 29 деления, второй вход которого подключен к выходу третьего задатчика 30 сигнала и третьему входу шестого сумматора 26, второй блок 31 умножения, второй вход которого подключен к выходу первого функционального преобразователя 14, пятый функциональный преобразователь 32, вход которого подключен также к первым входам третьего 33, четвертого 34 и пятого 35 блоков умножения, а также к входу шестого квадратора 36, седьмой сумматор 37, третий блок 38 деления, шестой блок 39 умножения, восьмой сумматор 40, выход которого подключен к входу второго квадратора 6, причем выход второго блока 28 извлечения квадратного корня подключен ко второму входу первого блока 12 деления, последовательно соединенные седьмой блок 41 умножения, первый вход которого подключен к выходу второго функционального преобразователя 15, шестой функциональный преобразователь 42, вход которого подключен также ко второму входу четвертого блока 34 умножения, к первым входам восьмого 43 и девятого 44 блоков умножения, а также к входу седьмого квадратора 45, девятый сумматор 46, второй вход которого подключен к выходу пятого блока 35 умножения, четвертый блок 47 деления, второй вход которого подключен к третьему входу девятого сумматора 46, к вторым входам седьмого сумматора 37, третьего блока 38 деления, третьего 33, седьмого 41 и восьмого 43 блоков умножения, а также - к выходу второго блока 29 деления, десятый блок 48 умножения и десятый сумматор 49, выход которого подключен к входу третьего квадратора 7, последовательно соединенные одиннадцатый сумматор 50, одиннадцатый блок 51 умножения, второй вход которого подключен к выходу третьего сумматора 17, а также к вторым входам шестого 39 и десятого 48 блоков умножения, двенадцатый сумматор 52, второй вход которого через двенадцатый блок 53 умножения подключен к выходу восьмого блока 43 умножения, его третий вход через тринадцатый блок 54 умножения - к выходу третьего блока 33 умножения, а выход - к входу второго квадратора 6, последовательно соединенные тринадцатый сумматор 55, первый вход которого подключен к выходу седьмого квадратора 45 и первому входу одиннадцатого сумматора 50, а его второй вход - к выходу третьего задатчика 30 сигнала и первому входу четырнадцатого сумматора 56, подключенного вторым входом к выходу шестого квадратора 36 и к второму входу одиннадцатого сумматора 50, а выходом - к первому входу четырнадцатого блока 57 умножения, выход которого соединен со вторым входом восьмого сумматора 40, третий вход которого через пятнадцатый блок 58 умножения подключен к выходу пятого сумматора 24, к второму входу двенадцатого блока 53 умножения и к первому входу шестнадцатого блока 59 умножения, второй вход которого соединен с выходом тринадцатого сумматора 55, а выход - с вторым входом десятого сумматора 49, третий вход которого через семнадцатый блок 60 умножения подключен к вторым входам тринадцатого 54 и четырнадцатого 57 блоков умножения, а также к выходу четвертого сумматора 21, причем второй вход семнадцатого блока 60 умножения соединен со вторыми входами пятого 35, девятого 44 и пятнадцатого 58 блоков умножения, а также с выходом четвертого блока 34 умножения, вход нелинейного элемента 9 подключен к выходу первого интегратора 3, а третий вход седьмого сумматора 37 - к выходу девятого блока 44 умножения, а также последовательно соединенные восьмой квадратор 61, первый вход которого подключен к выходу четвертого сумматора 21, пятнадцатый сумматор 62, второй и третий входы которого через девятый 63 и десятый 64 квадраторы подключены, соответственно, к выходам третьего 17 и пятого 24 сумматоров, и третий блок 65 извлечения квадратного корня, выход которого подключен к третьему входу первого сумматора 2.
На фиг.1 введены следующие обозначения: εon - величина допустимого отклонения ДО от заданной траектории его движения;  - величина отклонения ДО от заданной пространственной траектории; ν* - желаемая скорость движения ДО вдоль заданной траектории; x, y, z - текущие значения пространственных координат ДО в абсолютной системе координат, формируемые его навигационной системой; x*, y*, z* - программные сигналы управления по соответствующим степеням свободы ДО; S - командный сигнал начала или прекращения работы системы; εx=x*-x, εy=y*-y, εz=z*-z - сигналы ошибок движения ДО по соответствующим осям абсолютной системы координат; εm - расстояние от ДО до целевой точки, находящейся на заданной траектории; Ф, f1, f2, f3 - промежуточные переменные.
- величина отклонения ДО от заданной пространственной траектории; ν* - желаемая скорость движения ДО вдоль заданной траектории; x, y, z - текущие значения пространственных координат ДО в абсолютной системе координат, формируемые его навигационной системой; x*, y*, z* - программные сигналы управления по соответствующим степеням свободы ДО; S - командный сигнал начала или прекращения работы системы; εx=x*-x, εy=y*-y, εz=z*-z - сигналы ошибок движения ДО по соответствующим осям абсолютной системы координат; εm - расстояние от ДО до целевой точки, находящейся на заданной траектории; Ф, f1, f2, f3 - промежуточные переменные.
Устройство работает следующим образом. Сигнал x* формируется на выходе интегратора 13. Желаемая траектория движения ДО в пространстве задается с помощью гладких функциональных зависимостей y*(t)=gy(x*(t)) и z*(t)=gz(x*(t)), которые реализуются функциональными преобразователями 19 и 22 соответственно. Функциональные преобразователи 14 и 15 реализуют функции  и
и  . В качестве блоков 14, 15, 19 и 22 используются диодные функциональные преобразователи, позволяющие осуществлять кусочно-линейную аппроксимацию гладких функций. При этом количество диодных ячеек, входящих в состав этих преобразователей, определяется требуемой точностью аппроксимации соответствующих функций. Настройка этих функциональных преобразователей производится при задании желаемой траектории движения ДО.
. В качестве блоков 14, 15, 19 и 22 используются диодные функциональные преобразователи, позволяющие осуществлять кусочно-линейную аппроксимацию гладких функций. При этом количество диодных ячеек, входящих в состав этих преобразователей, определяется требуемой точностью аппроксимации соответствующих функций. Настройка этих функциональных преобразователей производится при задании желаемой траектории движения ДО.
Все входы сумматора 26 имеют единичные коэффициенты усиления. На выходе задатчика 30 формируется единичный сигнал. В результате на выходе блока 28 формируется сигнал  , а на выходе блока 12 - сигнал х*=ν*/Ф. Сигналы x*(t), y*(t) и z*(t), поступающие на входы соответствующих следящих систем отдельных степеней свободы ДО, обеспечивают его перемещение вблизи заданной пространственной траектории.
, а на выходе блока 12 - сигнал х*=ν*/Ф. Сигналы x*(t), y*(t) и z*(t), поступающие на входы соответствующих следящих систем отдельных степеней свободы ДО, обеспечивают его перемещение вблизи заданной пространственной траектории.
При увеличении ν* будут возрастать эффекты взаимовлияния между степенями свободы ДО и силы сопротивления внешней среды. Это приводит к увеличению нагрузки на исполнительные приводы некоторых следящих систем и, как следствие, к снижению точности управления указанным ДО и к входу его исполнительных устройств в насыщение. В результате на отдельных участках траектории движения этого ДО (особенно с большой кривизной) могут возникать недопустимо большие его отклонения от заданной траектории. Для уменьшения указанных отклонений там, где это необходимо, следует снижать величину ν*. Это, соответственно, приведет к снижению нагрузки на исполнительные приводы и обеспечит их работу вне зоны насыщения.
При движении по участкам траектории, близким к прямолинейным, эффекты взаимовлияний между степенями свободы ДО минимальны. Поэтому на указанных участках без уменьшения точности можно значительно повышать скорости движения по этим участкам.
Предлагаемое устройство обеспечивает автоматическую настройку скорости движения ДО в зависимости от величины его текущего отклонения от заданной траектории. Если это отклонение начинает превышать некоторое заданное значение, то скорость движения ДО уменьшается, а при малых отклонениях - увеличивается. В результате движение этого ДО по заданной траектории осуществляется с максимально возможной скоростью, при которой его отклонение от этой траектории не превышает допустимого значения независимо от вида траектории и типа используемых следящих систем.
На выходах блоков 31 и 41 соответственно формируются сигналы f1=Ф-1,  ,
,  , а на выходах сумматоров 17, 21 и 24, первые положительные, а вторые отрицательные входы которых имеют единичные коэффициенты усиления, - сигналы εx, εy, εz соответственно.
, а на выходах сумматоров 17, 21 и 24, первые положительные, а вторые отрицательные входы которых имеют единичные коэффициенты усиления, - сигналы εx, εy, εz соответственно.
Положительные входы сумматора 50 имеют единичные коэффициенты усиления. Поэтому на его выходе формируется сигнал  , а на выходах блоков 51, 53, 54 соответственно - сигналы
, а на выходах блоков 51, 53, 54 соответственно - сигналы  , f1f3εz, и f1f2εy. В результате на выходе сумматора 52, первый (со стороны блока 51) положительный, а второй и третий отрицательный входы которого имеют единичные коэффициенты усиления, появляется сигнал
, f1f3εz, и f1f2εy. В результате на выходе сумматора 52, первый (со стороны блока 51) положительный, а второй и третий отрицательный входы которого имеют единичные коэффициенты усиления, появляется сигнал
 ,
,
который является проекцией вектора отклонения ДО от заданной траектории на ось x абсолютной системы координат.
Функциональный преобразователь 32 реализует кубическую зависимость, поэтому на его выходе формируется сигнал  . Первый и третий положительные и второй (со стороны блока 29) отрицательный входы сумматора 37 имеют единичные коэффициенты усиления. Поэтому на выходе сумматора 37 формируется сигнал
. Первый и третий положительные и второй (со стороны блока 29) отрицательный входы сумматора 37 имеют единичные коэффициенты усиления. Поэтому на выходе сумматора 37 формируется сигнал  . Первый положительный и второй отрицательный (со стороны квадратора 36) входы сумматора 56 имеют единичные коэффициенты усиления, поэтому на выходе этого сумматора формируется сигнал
. Первый положительный и второй отрицательный (со стороны квадратора 36) входы сумматора 56 имеют единичные коэффициенты усиления, поэтому на выходе этого сумматора формируется сигнал  , а на выходе сумматора 40, первый и второй положительные, а третий (со стороны блока 58) отрицательный входы которого имеют единичные коэффициенты усиления, формируется сигнал
, а на выходе сумматора 40, первый и второй положительные, а третий (со стороны блока 58) отрицательный входы которого имеют единичные коэффициенты усиления, формируется сигнал
 ,
,
который является проекцией на ось у абсолютной системы координат вектора отклонения ДО от заданной траектории.
Функциональный преобразователь 42 реализует кубическую зависимость, поэтому на его выходе формируется сигнал  . Первый и второй положительные, а третий (со стороны блока 29) отрицательный входы сумматора 46 имеют единичные коэффициенты усиления. Поэтому на выходе этого сумматора формируется сигнал
. Первый и второй положительные, а третий (со стороны блока 29) отрицательный входы сумматора 46 имеют единичные коэффициенты усиления. Поэтому на выходе этого сумматора формируется сигнал  . Первый положительный и второй отрицательный (со стороны квадратора 45) входы сумматора 55 имеют единичные коэффициенты усиления. В результате на выходе сумматора 55 формируется сигнал
. Первый положительный и второй отрицательный (со стороны квадратора 45) входы сумматора 55 имеют единичные коэффициенты усиления. В результате на выходе сумматора 55 формируется сигнал  .
.
Первый и второй положительные, а третий (со стороны блока 60) отрицательный входы сумматора 49 имеют единичные коэффициенты усиления. Поэтому на выходе этого сумматора формируется сигнал
 ,
,
который является проекцией на ось z абсолютной системы координат вектора отклонения ДО от заданной траектории.
Поскольку все положительные входы сумматора 5 имеют единичные коэффициенты усиления, то на выходе блока 8 формируется сигнал
 , отклонения ДО от заданной пространственной траектории.
, отклонения ДО от заданной пространственной траектории.
Все положительные входы сумматора 62 имеют единичные коэффициенты усиления, поэтому на выходе блока 65 формируется сигнал
 .
.
Первый положительный (со стороны задатчика 1) и второй отрицательный входы сумматора 2 имеют единичные коэффициенты усиления, а его третий отрицательный вход (со стороны блока 65) коэффициент усиления kε>0. На выходе задатчика 1 формируется постоянный сигнал εon, а на выходе сумматора 2 - сигнал  . Интегратор 3 вырабатывает сигнал желаемой скорости ν* движения ДО по заданной пространственной траектории.
. Интегратор 3 вырабатывает сигнал желаемой скорости ν* движения ДО по заданной пространственной траектории.
Если ξ>0, то ν* начинает увеличиваться, а в противном случае уменьшаться. Сигнал kεεm позволяет более точно управлять движением ДО, не давая целевой точке сильно удаляться от ДО на прямолинейных участках траектории. Использование нелинейного элемента 9 с характеристикой
 ,
,
также ограничивает нарастание ν* на прямолинейных участках траектории движения ДО, когда его отклонение от этой траектории близко к нулю, устраняя появление последующих больших ошибок движения, когда эта траектория начнет изгибаться. Кроме того, нелинейный элемент 9 обеспечивает перемещение ДО по заданной траектории только в нужном направлении независимо от знака ξ. Это особенно важно на начальном этапе движения ДО, когда его отклонение от начальной точки траектории может быть велико и иметь произвольное направление (в том числе и в противоположную от предстоящего движения ДО сторону).
Сигнал S с выхода задатчика 11 определяет начало и окончание работы системы. Если S=1, то ν*≥0 и целевая точка начинает движение по траектории. Если S=0, то ν*=0 и целевая точка останавливается (например, при достижении конечной точки траектории). Сигнал S может использоваться и для аварийного прекращения движения ДО по заданной траектории.
Таким образом, предлагаемое устройство настройки желаемой скорости движения ДО по заданной пространственной траектории автоматически формирует такие программные сигналы движения, поступающие на входы всех следящих систем ДО, которые обеспечивают его движение по указанной траектории с максимально возможной скоростью, при которой отклонение этого ДО от траектории не превышает допустимого значения.
Устройство для формирования программных сигналов управления пространственным движением динамических объектов, содержащее последовательно соединенные первый задатчик сигнала, первый сумматор, первый интегратор, отличающееся тем, что в него дополнительно введены последовательно соединенные первый квадратор, второй сумматор, второй и третий входы которого подключены соответственно к выходам второго и третьего квадраторов, и первый блок извлечения квадратного корня, выход которого подключен ко второму входу первого сумматора, последовательно соединенные нелинейный элемент, первый блок умножения, второй вход которого подключен к выходу второго задатчика сигнала, первый блок деления, второй интегратор, первый функциональный преобразователь, вход которого подключен также к входам второго функционального преобразователя и первой следящей системы, к первому входу третьего сумматора, второй вход которого соединен с первым выходом навигационной системы, через третий функциональный преобразователь - к входу второй следящей системы и первому входу четвертого сумматора, второй вход которого соединен со вторым выходом навигационной системы, через четвертый функциональный преобразователь - к входу третьей следящей системы и к первому входу пятого сумматора, второй вход которого подключен к третьему выходу навигационной системы, четвертый квадратор, шестой сумматор, второй вход которого через пятый квадратор подключен к выходу второго функционального преобразователя, второй блок извлечения квадратного корня, второй блок деления, второй вход которого подключен к выходу третьего задатчика сигнала и третьему входу шестого сумматора, второй блок умножения, второй вход которого подключен к выходу первого функционального преобразователя, пятый функциональный преобразователь, вход которого подключен также к первым входам третьего, четвертого и пятого блоков умножения, а также к входу шестого квадратора, седьмой сумматор, третий блок деления, шестой блок умножения, восьмой сумматор, выход которого подключен к входу второго квадратора, причем выход второго блока извлечения квадратного корня подключен ко второму входу первого блока деления, последовательно соединенные седьмой блок умножения, первый вход которого подключен к выходу второго функционального преобразователя, шестой функциональный преобразователь, вход которого подключен также ко второму входу четвертого блока умножения, к первым входам восьмого и девятого блоков умножения, а также к входу седьмого квадратора, девятый сумматор, второй вход которого подключен к выходу пятого блока умножения, четвертый блок деления, второй вход которого подключен к третьему входу девятого сумматора, к вторым входам седьмого сумматора, третьего блока деления, третьего, седьмого и восьмого блоков умножения, а также - к выходу второго блока деления, десятый блок умножения и десятый сумматор, выход которого подключен к входу третьего квадратора, последовательно соединенные одиннадцатый сумматор, одиннадцатый блок умножения, второй вход которого подключен к выходу третьего сумматора, а также к вторым входам шестого и десятого блоков умножения, двенадцатый сумматор, второй вход которого через двенадцатый блок умножения подключен к выходу восьмого блока умножения, его третий вход через тринадцатый блок умножения - к выходу третьего блока умножения, а выход - к входу второго квадратора, последовательно соединенные тринадцатый сумматор, первый вход которого подключен к выходу седьмого квадратора и первому входу одиннадцатого сумматора, а его второй вход - к выходу третьего задатчика сигнала и первому входу четырнадцатого сумматора, подключенного вторым входом к выходу шестого квадратора и к второму входу одиннадцатого сумматора, а выходом - к первому входу четырнадцатого блока умножения, выход которого соединен со вторым входом восьмого сумматора, третий вход которого через пятнадцатый блок умножения подключен к выходу пятого сумматора, к второму входу двенадцатого блока умножения и к первому входу шестнадцатого блока умножения, второй вход которого соединен с выходом тринадцатого сумматора, а выход - с вторым входом десятого сумматора, третий вход которого через семнадцатый блок умножения подключен к вторым входам тринадцатого и четырнадцатого блоков умножения, а также к выходу четвертого сумматора, причем второй вход семнадцатого блока умножения соединен со вторыми входами пятого, девятого и пятнадцатого блоков умножения, а также с выходом четвертого блока умножения, вход нелинейного элемента подключен к выходу первого интегратора, а третий вход седьмого сумматора - к выходу девятого блока умножения, а также последовательно соединенные восьмой квадратор, первый вход которого подключен к выходу четвертого сумматора, пятнадцатый сумматор, второй и третий входы которого через девятый и десятый квадраторы подключены соответственно к выходам третьего и пятого сумматоров, и третий блок извлечения квадратного корня, выход которого подключен к третьему входу первого сумматора.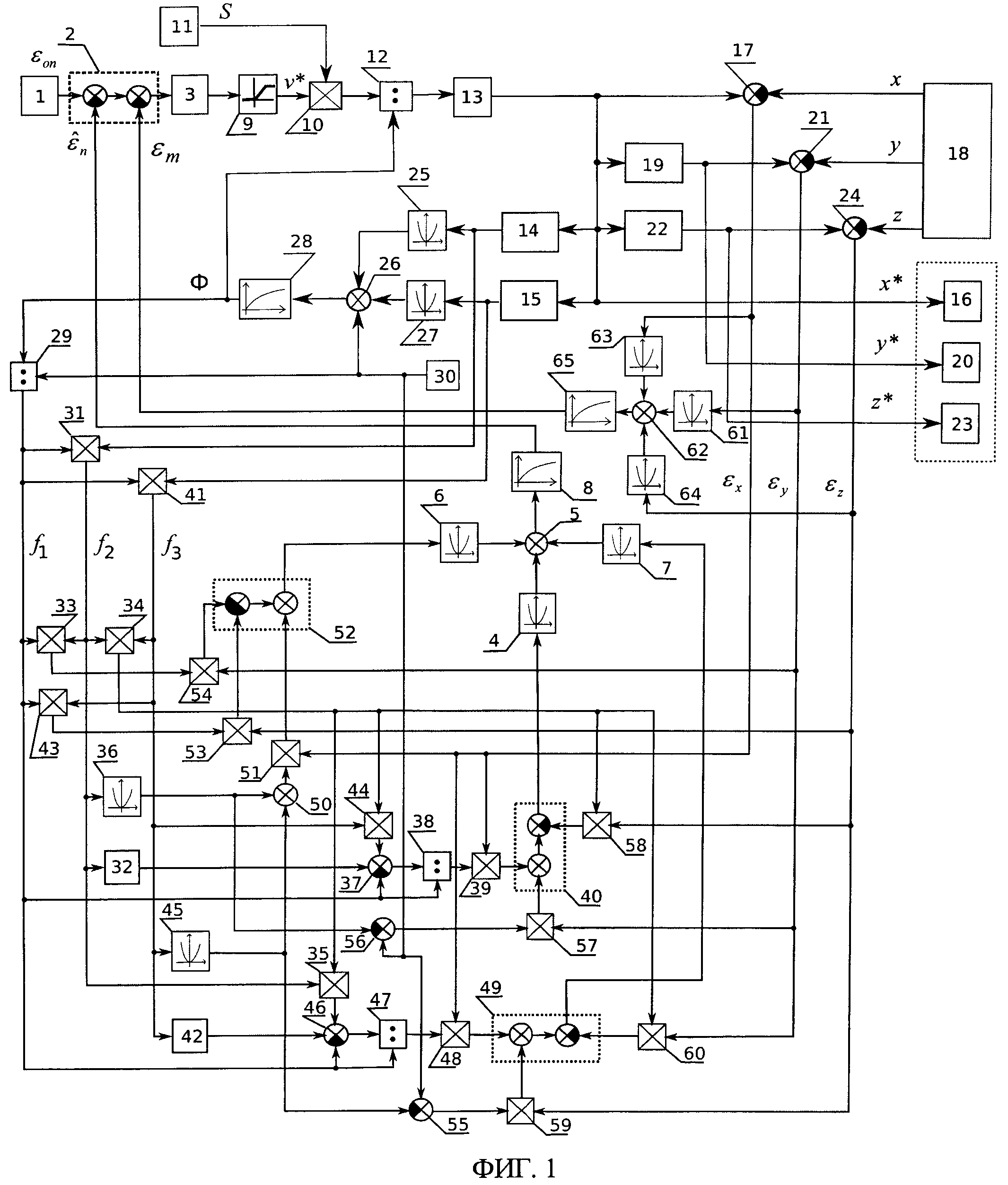
Устройство для очистки нефтесодержащих и сточных вод
Способ очистки нефтесодержащих сточных жидкостей
Электромашина
Способ управления подводным манипулятором в режиме зависания подводного аппарата
Электромашина
Электропривод манипулятора
Электрошпиндель
Ветроэнергетическая установка
Способ управления движением динамического объекта по пространственной траектории
Способ оценки усталости асфальтобетона при циклических динамических воздействиях
Устройство для очистки нефтесодержащих и сточных вод
Способ очистки нефтесодержащих сточных жидкостей
Электромашина
Способ управления подводным манипулятором в режиме зависания подводного аппарата
Электромашина
Электропривод манипулятора
Электрошпиндель
Нефтедобывающая подводная платформа
Ветроэнергетическая установка
Способ управления движением динамического объекта по пространственной траектории

