Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к области автоматического управления динамическими объектами (ДО), обеспечивающего их точное движение вдоль заданной траектории, в частности летательными и/или подводными аппаратами.
Известен электропривод с автоматической подстройкой частоты входного гармонического сигнала, содержащий последовательно соединенные первый сумматор, корректирующее устройство, усилитель, двигатель, редуктор, датчик положения, выход которого соединен с первым входом первого сумматора, отличающийся тем, что в него дополнительно введены последовательно соединенные блок вычисления модуля, вход которого соединен с выходом первого сумматора, второй сумматор, релейный элемент, запоминающее устройство, информационный вход которого соединен с выходом блока вычисления модуля и через устройство задержки - со вторым входом второго сумматора, третий сумматор, второй вход которого соединен с выходом первого задатчика сигнала, первый интегратор, фильтр низких частот второго порядка, четвертый сумматор, второй вход которого соединен с выходом второго задатчика сигнала, второй интегратор, синусный функциональный преобразователь, блок умножения, второй вход которого соединен с третьим задатчиком сигнала, а выход - со вторым входом первого сумматора (пат. РФ №2399079, БИ №25, 2010 г.).
Недостатком данного устройства является то, что оно позволяет формировать только гармонический программный сигнал, обеспечивающий максимально возможную скорость движения ДО при сохранении допустимого значения динамической ошибки управления. Формирование другого вида программных сигналов в указанном устройстве невозможно. Кроме того, это устройство позволяет формировать программный сигнал только для одной степени свободы ДО, что не позволяет использовать его для управления движением этого ДО по пространственной траектории.
Также известно устройство для формирования программных сигналов управления пространственным движением динамических объектов, содержащее последовательно соединенные первый задатчик постоянного сигнала, первый сумматор, первый интегратор, отличающееся тем, что в него дополнительно вводятся последовательно соединенные первый функциональный преобразователь, вход которого соединен с выходом первого интегратора, блок умножения, второй вход которого соединен с выходом второго задатчика сигнала, блок деления, второй интегратор, второй сумматор, второй вход которого соединен с первым выходом навигационной системы, первый квадратор, третий сумматор, второй положительный вход которого через второй квадратор соединен с выходом четвертого сумматора, а его третий вход через третий квадратор соединен с выходом пятого сумматора, первый блок извлечения корня, выход которого соединен со вторым входом первого сумматора, последовательно соединенные второй функциональный преобразователь, вход которого соединен с выходом второго интегратора, входом третьего функционального преобразователя, входом первой следящей системы, через четвертый функциональный преобразователь - с первым входом четвертого сумматора, второй вход которого соединен со вторым выходом навигационной системы, и входом второй следящей системы, а через пятый функциональный преобразователь - с первым входом пятого сумматора, второй вход которого соединен с третьим выходом навигационной системы 10, и входом третей следящей системы, четвертый квадратор, шестой сумматор, второй вход которого через пятый квадратор соединен с выходом третьего функционального преобразователя, а третий вход - с выходом третьего задатчика постоянного сигнала, и третий блок извлечения корня, выход которого соединен со вторым входом блока деления (пат. РФ №2453894, БИ №17, 2012 г.).
Недостатком данного устройства является то, что оно обеспечивает заданную точность движения ДО вдоль пространственной траектории только за счет снижения скорости его движения.
Задачей, на решение которой направлено заявленное техническое решение, является обеспечение заданной динамической точности скоростного движения ДО на всех участках криволинейной пространственной траектории независимо от динамических свойств этого объекта и его системы управления.
Технический результат заявляемого решения выражается в формировании специального контура автоматической коррекции программных сигналов движения ДО, который на основе информации об отклонении этого ДО от траектории смещает целевую точку с указанной траектории таким образом, чтобы обеспечить заданную динамическую точность движения ДО без снижения скорости этого движения.
Поставленная задача решается тем, что в устройство для формирования программных сигналов управления пространственным движением динамических объектов, содержащее последовательно соединенные первый блок умножения, первый вход которого соединен с выходом первого задатчика сигнала, первый блок деления, интегратор, первый функциональный преобразователь, вход которого подключен также к входу второго функционального преобразователя, к первому входу первого сумматора, второй вход которого соединен с первым выходом навигационной системы, через третий функциональный преобразователь - к первому входу второго сумматора, второй вход которого соединен с вторым выходом навигационной системы, и через четвертый функциональный преобразователь - к первому входу третьего сумматора, второй вход которого подключен к третьему выходу навигационной системы, первый квадратор, четвертый сумматор, второй вход которого через второй квадратор подключен к выходу второго функционального преобразователя 6, а его третий вход - к выходу второго задатчика сигнала, и блок извлечения квадратного корня, выход которого подключен ко второму входу первого блока деления, дополнительно введены последовательно соединенные второй блок деления, первый вход которого подключен к выходу блока извлечения квадратного корня, а его второй вход - к выходу второго задатчика сигнала, второй блок умножения, второй вход которого подключен к выходу первого функционального преобразователя, пятый функциональный преобразователь, вход которого подключен также к первым входам третьего, четвертого и пятого блоков умножения, а также к входу третьего квадратора, пятый сумматор, третий блок деления, шестой блок умножения, шестой сумматор, второй вход которого подключен к выходу третьего функционального преобразователя, а выход - ко входу первой следящей системы, последовательно соединенные седьмой блок умножения, первый вход которого подключен к выходу второго функционального преобразователя 6, шестой функциональный преобразователь, вход которого подключен также ко второму входу четвертого блока умножения, к первым входам восьмого и девятого блоков умножения, а также к входу четвертого квадратора, седьмой сумматор, второй вход которого подключен к выходу пятого блока умножения, четвертый блок деления, второй вход которого подключен к третьему входу седьмого сумматора, к вторым входам пятого сумматора, третьего блока деления, третьего, седьмого и восьмого блоков умножения, а также к выходу второго блока деления, десятый блок умножения и восьмой сумматор, второй вход которого подключен к выходу четвертого функционального преобразователя, а выход - к входу второй следящей системы, последовательно соединенные девятый сумматор, одиннадцатый блок умножения, второй вход которого подключен к выходу первого сумматора, а также к вторым входам шестого и десятого блоков умножения, десятый сумматор, второй вход которого через двенадцатый блок умножения подключен к выходу восьмого блока умножения, его третий вход через тринадцатый блок умножения - к выходу третьего блока умножения, четвертый вход - к выходу интегратора, а выход - ко входу третьей следящей системы, последовательно соединенные одиннадцатый сумматор, первый вход которого подключен к выходу четвертого квадратора и первому входу девятого сумматора, а его второй вход - к выходу второго задатчика сигнала и к первому входу двенадцатого сумматора, подключенного вторым входом к выходу третьего квадратора и к второму входу девятого сумматора, а выходом - к первому входу четырнадцатого блока умножения, выход которого соединен с третьим входом шестого сумматора, четвертый вход которого через пятнадцатый блок умножения подключен к выходу третьего сумматора, ко второму входу двенадцатого блока умножения и к первому входу шестнадцатого блока умножения, второй вход которого соединен с выходом одиннадцатого сумматора, а выход - с третьим входом восьмого сумматора, четвертый вход которого через семнадцатый блок умножения подключен к вторым входам тринадцатого и четырнадцатого блоков умножения, а также к выходу второго сумматора, причем второй вход семнадцатого блока умножения соединен со вторыми входами пятого, девятого и пятнадцатого блоков умножения, а также с выходом четвертого блока умножения, при этом третий вход пятого сумматора подключен к выходу девятого блока умножения, а выход третьего задатчика сигнала соединен со вторым входом первого блока умножения.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствуют о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения позволяют обеспечить желаемую динамическую точность движения ДО по заданной пространственной траектории без снижения заданной скорости его движения.
Блок-схема предлагаемого устройства для формирования программных сигналов управления пространственным движением ДО представлена на фиг.1.
Устройство для формирования программных сигналов управления пространственным движением динамических объектов содержит последовательно соединенные первый блок 1 умножения, первый вход которого соединен с выходом первого задатчика 2 сигнала, первый блок 3 деления, интегратор 4, первый функциональный преобразователь 5, вход которого подключен также к входу второго функционального преобразователя 6, к первому входу первого сумматора 7, второй вход которого соединен с первым выходом навигационной системы 8, через третий функциональный преобразователь 9 - к первому входу второго сумматора 10, второй вход которого соединен с вторым выходом навигационной системы 8, и через четвертый функциональный преобразователь 11 - к первому входу третьего сумматора 12, второй вход которого подключен к третьему выходу навигационной системы 8, первый квадратор 13, четвертый сумматор 14, второй вход которого через второй квадратор 15 подключен к выходу второго функционального преобразователя 6, а его третий вход - к выходу второго задатчика сигнала 16, и блок 17 извлечения квадратного корня, выход которого подключен ко второму входу первого блока 3 деления, последовательно соединенные второй блок 18 деления, первый вход которого подключен к выходу блока 17 извлечения квадратного корня, а его второй вход - к выходу второго задатчика 16 сигнала, второй блок 19 умножения, второй вход которого подключен к выходу первого функционального преобразователя 5, пятый функциональный преобразователь 20, вход которого подключен также к первым входам третьего 21, четвертого 22 и пятого 23 блоков умножения, а также к входу третьего квадратора 24, пятый сумматор 25, третий блок 26 деления, шестой блок 27 умножения, шестой сумматор 28, второй вход которого подключен к выходу третьего функционального преобразователя 9, а выход - ко входу первой следящей системы 29, последовательно соединенные седьмой блок 30 умножения, первый вход которого подключен к выходу второго функционального преобразователя 6, шестой функциональный преобразователь 31, вход которого подключен также ко второму входу четвертого блока 22 умножения, к первым входам восьмого 32 и девятого 33 блоков умножения, а также к входу четвертого квадратора 34, седьмой сумматор 35, второй вход которого подключен к выходу пятого блока 23 умножения, четвертый блок 36 деления, второй вход которого подключен к третьему входу седьмого сумматора 35, к вторым входам пятого сумматора 25, третьего блока 26 деления, третьего 21, седьмого 30 и восьмого 32 блоков умножения, а также к выходу второго блока 18 деления, десятый блок 37 умножения и восьмой сумматор 38, второй вход которого подключен к выходу четвертого функционального преобразователя 11, а выход - к входу второй следящей системы 39, последовательно соединенные девятый сумматор 40, одиннадцатый блок 41 умножения, второй вход которого подключен к выходу первого сумматора 7, а также к вторым входам шестого 27 и десятого 37 блоков умножения, десятый сумматор 42, второй вход которого через двенадцатый блок 43 умножения подключен к выходу восьмого блока 32 умножения, его третий вход через тринадцатый блок 44 умножения - к выходу третьего блока 21 умножения, четвертый вход - к выходу интегратора 4, а выход - ко входу третьей следящей системы 45, последовательно соединенные одиннадцатый сумматор 46, первый вход которого подключен к выходу четвертого квадратора 34 и первому входу девятого сумматора 40, а его второй вход - к выходу второго задатчика 16 сигнала и к первому входу двенадцатого сумматора 47, подключенного вторым входом к выходу третьего квадратора 24 и к второму входу девятого сумматора 40, а выходом - к первому входу четырнадцатого блока 48 умножения, выход которого соединен с третьим входом шестого сумматора 28, четвертый вход которого через пятнадцатый блок 49 умножения подключен к выходу третьего сумматора 12, ко второму входу двенадцатого блока 43 умножения и к первому входу шестнадцатого блока 50 умножения, второй вход которого соединен с выходом одиннадцатого сумматора 46, а выход - с третьим входом восьмого сумматора 38, четвертый вход которого через семнадцатый блок 51 умножения подключен к вторым входам тринадцатого 44 и четырнадцатого 48 блоков умножения, а также к выходу второго сумматора 10, причем второй вход семнадцатого блока 51 умножения соединен со вторыми входами пятого 23, девятого 33 и пятнадцатого 49 блоков умножения, а также с выходом четвертого блока 22 умножения, при этом третий вход пятого сумматора 25 подключен к выходу девятого блока 33 умножения, а выход третьего задатчика 52 сигнала соединен со вторым входом первого блока 1 умножения.
На чертеже введены следующие обозначения: v* - желаемая скорость движения ДО вдоль заданной траектории; х, у, z - текущие значения пространственных координат ДО, формируемые его навигационной системой; х*, у*, z* - программные сигналы, задающие желаемое положение ДО на пространственной траектории;  ,
,  ,
,  - скорректированные программные сигналы для соответствующих следящих систем; εx=х*-х, εy=y*-y, εz=z*-z - сигналы ошибок движения ДО по соответствующим осям абсолютной системы координат (СК); S - командный сигнал начала или прекращения работы системы; Ф, f1, f2, f3 - промежуточные переменные.
- скорректированные программные сигналы для соответствующих следящих систем; εx=х*-х, εy=y*-y, εz=z*-z - сигналы ошибок движения ДО по соответствующим осям абсолютной системы координат (СК); S - командный сигнал начала или прекращения работы системы; Ф, f1, f2, f3 - промежуточные переменные.
Устройство работает следующим образом. Сигнал х* формируется на выходе интегратора 4. Желаемая траектория движения ДО в пространстве задается с помощью гладких функциональных зависимостей y*(t)=gy(х*(t)) и z*(t)=gz(х*(t)), которые реализуются функциональными преобразователями 9 и 11 соответственно. Функциональные преобразователи 5 и 6 реализуют функции  и
и  . В качестве блоков 5, 6, 9 и 11 используются диодные функциональные преобразователи, позволяющие осуществлять кусочно-линейную аппроксимацию гладких функций. При этом количество диодных ячеек, входящих в состав этих преобразователей, определяется требуемой точностью аппроксимации соответствующих функций. Настройка этих функциональных преобразователей производится при задании желаемой траектории движения ДО.
. В качестве блоков 5, 6, 9 и 11 используются диодные функциональные преобразователи, позволяющие осуществлять кусочно-линейную аппроксимацию гладких функций. При этом количество диодных ячеек, входящих в состав этих преобразователей, определяется требуемой точностью аппроксимации соответствующих функций. Настройка этих функциональных преобразователей производится при задании желаемой траектории движения ДО.
Все положительные входы сумматора 14 имеют единичные коэффициенты усиления. На выходе задатчика 16 формируется единичный сигнал. В результате на выходе блока 17 формируется сигнал  , а на выходе блока 3 - сигнал
, а на выходе блока 3 - сигнал  . При этом величина ν* задается на выходе задатчика 52. При этом сигналы x*(t), у*(t) и z*(t) задают координаты целевой точки, движущейся по заданной траектории с желаемой скоростью.
. При этом величина ν* задается на выходе задатчика 52. При этом сигналы x*(t), у*(t) и z*(t) задают координаты целевой точки, движущейся по заданной траектории с желаемой скоростью.
Отработка сигналов x*(t), y*(t) и z*(t) при использовании типовых следящих систем управления движением ДО на криволинейных участках траектории этого движения осуществляется с большими отклонениями от нее. Для уменьшения этого отклонения необходимо специально корректировать исходные значения сигналов х*, y*, z* так, чтобы ДО всегда находился вблизи предписанной ему траектории движения, даже если его следящие системы 29, 39 и 45 будут работать с большими динамическими ошибками.
Предлагаемое устройство обеспечивает коррекцию сигналов х*, y*, z* для обеспечения желаемой точности движения ДО вдоль заданной траектории. Указанная коррекция осуществляется автоматическим смещением целевой точки движения ДО с ее первоначальной траектории и формированием таких сигналов управления соответствующими следящими системами, которые уменьшат отклонение ДО от предписанной ему траектории движения.
На выходах блоков 18, 19 и 30, соответственно, формируются сигналы  ,
,  ,
,  , а на выходах сумматоров 7, 10 и 12, первые положительные (со стороны интегратора 7 и функциональных преобразователей 9 и 11, соответственно), а вторые отрицательные входы которых имеют единичные коэффициенты усиления, - сигналы εx=х*-х, εy=y*-y, εz=z*-z, соответственно.
, а на выходах сумматоров 7, 10 и 12, первые положительные (со стороны интегратора 7 и функциональных преобразователей 9 и 11, соответственно), а вторые отрицательные входы которых имеют единичные коэффициенты усиления, - сигналы εx=х*-х, εy=y*-y, εz=z*-z, соответственно.
Положительные входы сумматора 40 имеют единичные коэффициенты усиления. Поэтому на выходах блоков 41, 43, 44, соответственно, формируются сигналы  , f1f3εy и f1f2εy, a на выходе сумматора 42, первый (со стороны блока 41) положительный, второй и третий отрицательный входы которого имеют коэффициенты усиления knε, a четвертый положительный - единичный коэффициент усиления, формируется сигнал
, f1f3εy и f1f2εy, a на выходе сумматора 42, первый (со стороны блока 41) положительный, второй и третий отрицательный входы которого имеют коэффициенты усиления knε, a четвертый положительный - единичный коэффициент усиления, формируется сигнал  , где
, где  - проекция на ось х абсолютной СК вектора отклонения ДО от заданной траектории.
- проекция на ось х абсолютной СК вектора отклонения ДО от заданной траектории.
Функциональный преобразователь 20 реализует кубическую зависимость, поэтому на его выходе формируется сигнал  . Первый и третий положительные, а второй (со стороны блока 18) отрицательный входы сумматора 25 имеют единичные коэффициенты усиления. Поэтому на его выходе формируется сигнал
. Первый и третий положительные, а второй (со стороны блока 18) отрицательный входы сумматора 25 имеют единичные коэффициенты усиления. Поэтому на его выходе формируется сигнал  . Первый положительный и второй отрицательный (со стороны квадратора 24) входы сумматора 47 имеют единичные коэффициенты усиления. Поэтому на его выходе формируется сигнал
. Первый положительный и второй отрицательный (со стороны квадратора 24) входы сумматора 47 имеют единичные коэффициенты усиления. Поэтому на его выходе формируется сигнал  , а на выходе сумматора 28, первый и третий (со стороны блоков 27 и 48, соответственно) положительные и четвертый (со стороны блока 49) отрицательный входы которого имеют коэффициенты усиления knε, а второй положительный - единичный коэффициент усиления, формируется сигнал
, а на выходе сумматора 28, первый и третий (со стороны блоков 27 и 48, соответственно) положительные и четвертый (со стороны блока 49) отрицательный входы которого имеют коэффициенты усиления knε, а второй положительный - единичный коэффициент усиления, формируется сигнал  , где
, где  - проекция на ось у абсолютной СК вектора отклонения ДО от его траектории. Функциональный преобразователь 31 реализует кубическую зависимость, поэтому на его выходе формируется сигнал
- проекция на ось у абсолютной СК вектора отклонения ДО от его траектории. Функциональный преобразователь 31 реализует кубическую зависимость, поэтому на его выходе формируется сигнал  . Первый и второй положительные, а третий (со стороны блока 18) отрицательный входы сумматора 35 имеют единичные коэффициенты усиления. Поэтому на его выходе формируется сигнал
. Первый и второй положительные, а третий (со стороны блока 18) отрицательный входы сумматора 35 имеют единичные коэффициенты усиления. Поэтому на его выходе формируется сигнал  . Первый положительный и второй отрицательный (со стороны квадратора 34) входы сумматора 46 имеют единичные коэффициенты усиления. В результате на его выходе формируется сигнал
. Первый положительный и второй отрицательный (со стороны квадратора 34) входы сумматора 46 имеют единичные коэффициенты усиления. В результате на его выходе формируется сигнал  . Первый и третий положительные (со стороны блоков 37 и 50), четвертый (со стороны блока 51) отрицательный входы сумматора 38 имеют коэффициенты усиления knε, а второй положительный - единичный коэффициент усиления. Поэтому на выходе этого сумматора формируется сигнал
. Первый и третий положительные (со стороны блоков 37 и 50), четвертый (со стороны блока 51) отрицательный входы сумматора 38 имеют коэффициенты усиления knε, а второй положительный - единичный коэффициент усиления. Поэтому на выходе этого сумматора формируется сигнал
 ,
,  - проекция на ось z абсолютной СК вектора отклонения ДО от его траектории.
- проекция на ось z абсолютной СК вектора отклонения ДО от его траектории.
При использовании предлагаемого устройства удается автоматически формировать такие программные сигналы, поступающие на входы следящих систем 48, 30 и 41 ДО, которые независимо от вида и сложности этих следящих систем обеспечивают его движение вдоль указанной траектории с желаемой динамической точностью без уменьшения скорости этого движения.
Устройство для формирования программных сигналов управления пространственным движением динамических объектов, содержащее последовательно соединенные первый блок умножения, первый вход которого соединен с выходом первого задатчика сигнала, первый блок деления, интегратор, первый функциональный преобразователь, вход которого подключен также к входу второго функционального преобразователя, к первому входу первого сумматора, второй вход которого соединен с первым выходом навигационной системы, через третий функциональный преобразователь - к первому входу второго сумматора, второй вход которого соединен с вторым выходом навигационной системы, и через четвертый функциональный преобразователь - к первому входу третьего сумматора, второй вход которого подключен к третьему выходу навигационной системы, первый квадратор, четвертый сумматор, второй вход которого через второй квадратор подключен к выходу второго функционального преобразователя, а его третий вход - к выходу второго задатчика сигнала, и блок извлечения квадратного корня, выход которого подключен ко второму входу первого блока деления, отличающееся тем, что в него дополнительно введены последовательно соединенные второй блок деления, первый вход которого подключен к выходу блока извлечения квадратного корня, а его второй вход - к выходу второго задатчика сигнала, второй блок умножения, второй вход которого подключен к выходу первого функционального преобразователя, пятый функциональный преобразователь, вход которого подключен также к первым входам третьего, четвертого и пятого блоков умножения, а также к входу третьего квадратора, пятый сумматор, третий блок деления, шестой блок умножения, шестой сумматор, второй вход которого подключен к выходу третьего функционального преобразователя, а выход - ко входу первой следящей системы, последовательно соединенные седьмой блок умножения, первый вход которого подключен к выходу второго функционального преобразователя, шестой функциональный преобразователь, вход которого подключен также ко второму входу четвертого блока умножения, к первым входам восьмого и девятого блоков умножения, а также к входу четвертого квадратора, седьмой сумматор, второй вход которого подключен к выходу пятого блока умножения, четвертый блок деления, второй вход которого подключен к третьему входу седьмого сумматора, к вторым входам пятого сумматора, третьего блока деления, третьего, седьмого и восьмого блоков умножения, а также к выходу второго блока деления, десятый блок умножения и восьмой сумматор, второй вход которого подключен к выходу четвертого функционального преобразователя, а выход - к входу второй следящей системы, последовательно соединенные девятый сумматор, одиннадцатый блок умножения, второй вход которого подключен к выходу первого сумматора, а также к вторым входам шестого и десятого блоков умножения, десятый сумматор, второй вход которого через двенадцатый блок умножения подключен к выходу восьмого блока умножения, его третий вход через тринадцатый блок умножения - к выходу третьего блока умножения, четвертый вход - к выходу интегратора, а выход - ко входу третьей следящей системы, последовательно соединенные одиннадцатый сумматор, первый вход которого подключен к выходу четвертого квадратора и первому входу девятого сумматора, а его второй вход - к выходу второго задатчика сигнала и к первому входу двенадцатого сумматора, подключенного вторым входом к выходу третьего квадратора и к второму входу девятого сумматора, а выходом - к первому входу четырнадцатого блока умножения, выход которого соединен с третьим входом шестого сумматора, четвертый вход которого через пятнадцатый блок умножения подключен к выходу третьего сумматора, ко второму входу двенадцатого блока умножения и к первому входу шестнадцатого блока умножения, второй вход которого соединен с выходом одиннадцатого сумматора, а выход - с третьим входом восьмого сумматора, четвертый вход которого через семнадцатый блок умножения подключен к вторым входам тринадцатого и четырнадцатого блоков умножения, а также к выходу второго сумматора, причем второй вход семнадцатого блока умножения соединен со вторыми входами пятого, девятого и пятнадцатого блоков умножения, а также с выходом четвертого блока умножения, при этом третий вход пятого сумматора подключен к выходу девятого блока умножения, а выход третьего задатчика сигнала соединен со вторым входом первого блока умножения.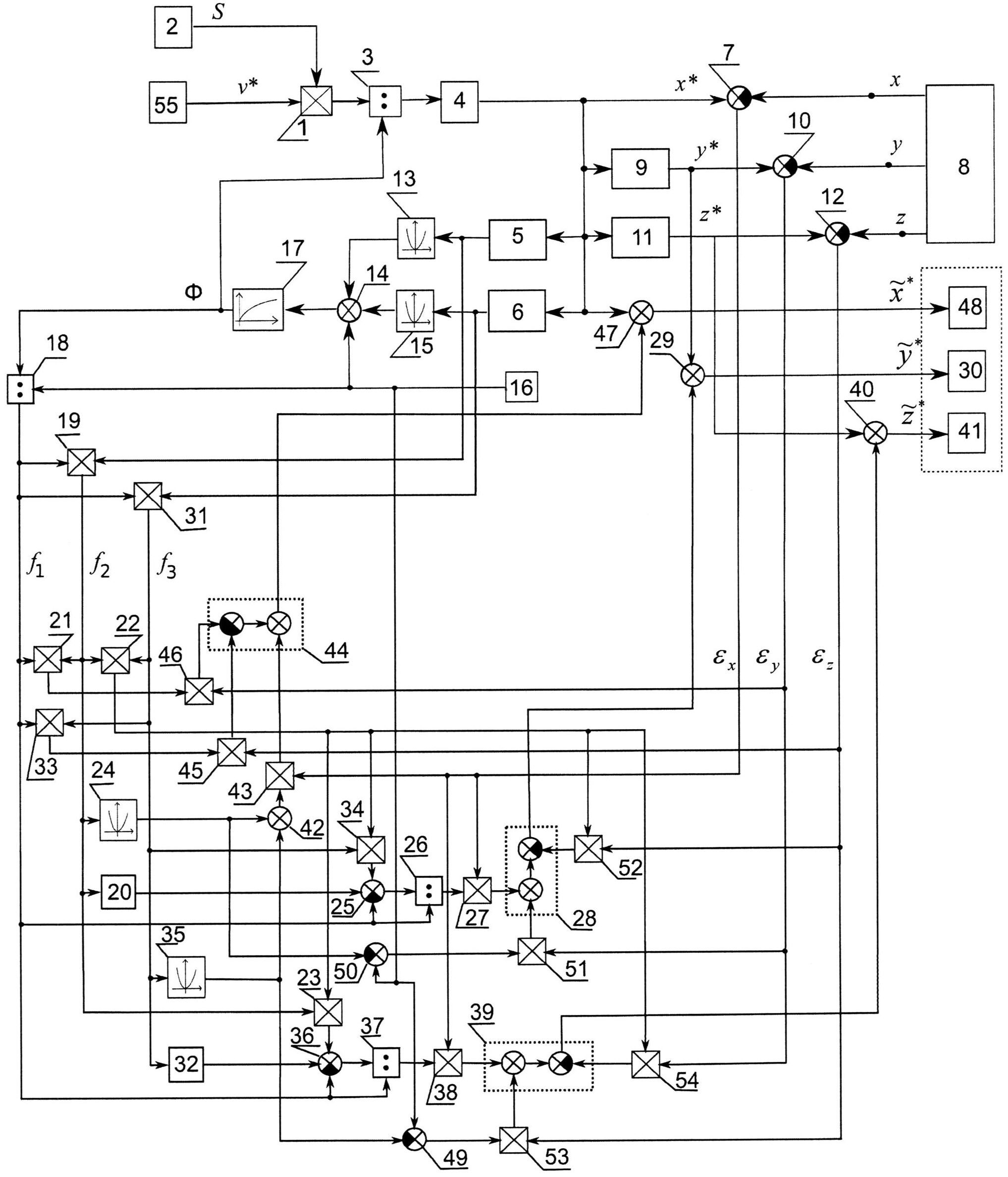
Опорный подшипниковый узел
Способ подводного массажа
Способ производства йогурта
Самонастраивающийся электропривод манипулятора
Способ работы системы теплоснабжения
Котел водогрейный прямоугольного поперечного сечения
Топка водогрейного котла
Судовое рулевое устройство
Полуфабрикат мясорастительный рубленый
Состав для производства шоколада
Состав для приготовления хлеба из пшеничной муки
Самонастраивающийся электропривод
Самонастраивающийся электропривод
Способ дезактивации радиоактивных отходов
Способ получения октагалактуронида
Способ получения гептагалактуронида
Водогрейный котел
Конвективный блок водогрейного котла
Котел водогрейный прямоугольного поперечного сечения
Способ оценки здоровья морских двустворчатых моллюсков и состояния среды их обитания

