Результат интеллектуальной деятельности: ПОЛЯРИЗАЦИОННО-ФАЗОВЫЙ СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА ПОДВИЖНОГО ОБЪЕКТА И РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к радионавигации и может использоваться, например, в пилотажно-навигационных системах ориентации летательного аппарата (ЛА) при заходе на посадку по приборам.
Известные способы и устройства измерения угла крена подвижного объекта основаны на использовании инерциальных систем навигации, в частности гироскопических систем ориентации [1-4]. Применительно к ЛА таким инерциальным системам навигации присущ ряд недостатков. Во-первых, с течением времени происходит постоянное накапливание ошибки измерений и за один час полета она составляет величину единицы градусов [2, 3]. Во-вторых, если ЛА развивает значительные перегрузки, то происходит увеличение собственной скорости прецессии гироскопа, что в ряде случаев может привести к полной потере его работоспособности [2].
Поскольку известные инерциальные средства измерения угла крена подвижного объекта основаны на другом физическом принципе, по сравнению с заявляемым, то они не могут рассматриваться в качестве аналогов, так как не имеют общих признаков.
Известны способ измерения пеленга подвижного объекта и устройство для его реализации (патент SU №1251003, М. кл.4 G01S, 3/02, приоритет от 29.01.85) [5].
Способ измерения пеленга подвижного объекта заключается в том, что из двух точек с известными координатами, расположенных в плоскости измерений на расстоянии d друг от друга, одновременно излучают ортогонально поляризованные электромагнитные волны с равными амплитудами, фазами и длинами волн. На подвижном объекте одновременно принимают ортогонально поляризованные электромагнитные волны и измеряют разность фаз Δφ между ними, после чего определяют пеленг β подвижного объекта относительно нормали к середине базы d, соединяющей точки излучений электромагнитных волн, по формуле:

где λ - длина волны излучаемых ортогонально поляризованных электромагнитных волн.
Недостатком этого способа является ограниченные функциональные возможности, заключающиеся в измерении только одного навигационного элемента - пеленга подвижного объекта, и невозможно измерить его угол крена.
Устройство для измерения пеленга подвижного объекта содержит передатчик с подключенными к нему двумя передающими антеннами с ортогональными линейными поляризациями, расположенными в точках с известными координатами в плоскости измерений на расстоянии d друг от друга и расположенных на подвижном объекте, приемную всеполяризованную антенну, линейный поляризационный разделитель, амплитудно-фазовый дискриминатор и вычислитель. При этом вход линейного поляризационного разделителя подключен к выходу приемной всеполяризованной антенны, два его выхода подключены к двум входам амплитудно-фазового дискриминатора, а его выход подключен к входу вычислителя. Причем линейный поляризационный разделитель ориентирован так, что его орты собственной системы координат совпадают с осями плеч ортогонально расположенных по отношению друг к другу прямоугольных волноводов и составляют угол 45° с плоскостью измерений. Работа устройства заключается в том, что передатчик через подключенные к нему две передающие антенны излучает ортогонально линейно поляризованные электромагнитные волны. На подвижном объекте суммарная электромагнитная волна принимается всеполяризованной антенной и затем поступает на вход линейного поляризационного разделителя, выполненного в виде волновода круглого сечения с переходом на два ортогонально расположенных волновода прямоугольного сечения. Выбранная ориентация линейного поляризационного разделителя позволяет осуществить прием суммарной электромагнитной волны в линейном ортогональном поляризационном базисе, единичные орты которого совпадают с ортами собственной системы координат линейного поляризационного разделителя, ориентированными под углом 45° к плоскости измерений. Таким образом в линейном поляризационном разделителе происходит разделение поступающей на его вход со стороны круглого волновода суммарной электромагнитной волны на две линейные ортогональные по поляризации электромагнитные волны, после чего выходные сигналы линейного поляризационного разделителя со стороны прямоугольных волноводов поступают на входы амплитудно-фазового дискриминатора, где происходит измерение амплитуд ортогонально линейно поляризованных сигналов, формируется их отношение и по найденному отношению измеряется разность фаз Δφ и в соответствии с формулой (1) рассчитывается вычислителем пеленг подвижного объекта.
Недостатком этого устройства является ограниченные функциональные возможности, обусловленные тем, что измеряется только пеленг подвижного объекта и невозможно измерить его угол крена.
Наиболее близким по совокупности признаков к заявляемому поляризационно-фазовому способу измерения угла крена подвижного объекта и радионавигационной системе для его реализации является навигационная система для измерения пеленга подвижного объекта, реализующая поляризационно-амплитудный способ измерения (авт.св. №1355955, М. кл.4 G01S, 3/02, приоритет от 9.12.85) [6], в которой устраняется влияние угла крена подвижного объекта на точность измерения его пеленга.
Суть поляризационно-амплитудного способа измерения пеленга подвижного объекта заключается в том, что из двух точек с известными координатами, расположенных в плоскости измерений на расстоянии d друг от друга, одновременно излучают ортогонально линейно поляризованные электромагнитные волны с равными амплитудами, фазами и длинами волн. Тогда суммарная электромагнитная волна может быть представлена в векторной форме в исправлении β, с учетом (1), в виде [6]:

где  - вектор Джонса горизонтально линейно поляризованной излучаемой электромагнитной волны, представленный в линейном ортогональном поляризационном базисе и совпадающий с осью ОХ неподвижной опорной прямоугольной системы координат YOX;
- вектор Джонса горизонтально линейно поляризованной излучаемой электромагнитной волны, представленный в линейном ортогональном поляризационном базисе и совпадающий с осью ОХ неподвижной опорной прямоугольной системы координат YOX;
 - вектор Джонса вертикально линейно поляризованной излучаемой электромагнитной волны, представленный в линейном ортогональном поляризационном базисе и совпадающий с осью OY неподвижной опорной прямоугольной системы координат YOX;
- вектор Джонса вертикально линейно поляризованной излучаемой электромагнитной волны, представленный в линейном ортогональном поляризационном базисе и совпадающий с осью OY неподвижной опорной прямоугольной системы координат YOX;
 - фазовый сдвиг между излучаемыми ортогонально линейно поляризованными электромагнитными волнами в точке приема в направлении β;
- фазовый сдвиг между излучаемыми ортогонально линейно поляризованными электромагнитными волнами в точке приема в направлении β;
 - вектор Джонса суммарной электромагнитной волны, представленный в линейном ортогональном поляризационном базисе, единичные орты которого совпадают с горизонтальной плоскостью и перпендикуляром к этой плоскости соответственно.
- вектор Джонса суммарной электромагнитной волны, представленный в линейном ортогональном поляризационном базисе, единичные орты которого совпадают с горизонтальной плоскостью и перпендикуляром к этой плоскости соответственно.
На борту подвижного объекта принимают суммарную электромагнитную волну (2) в собственном синфазном круговом поляризационном базисе, единичные орты которого соответствуют волнам с левой и правой круговой поляризациями, электрические векторы которых в начальный момент времени t=0 совпадают с вектором напряженности электрического поля излучаемой горизонтально линейно поляризованной электромагнитной волны, разделяют принятую суммарную электромагнитную волну (2) на две ортогонально поляризованные по кругу составляющие левого  и правого
и правого  направления вращения вектора напряженности электрического поля, измеряют их амплитуды EL и ER соответственно и рассчитывают пеленг подвижного объекта по формуле [6]:
направления вращения вектора напряженности электрического поля, измеряют их амплитуды EL и ER соответственно и рассчитывают пеленг подвижного объекта по формуле [6]:

Отмечается [6], что отношение амплитуд  , равное:
, равное:

не зависит от угла крена подвижного объекта и зависит только от разности фаз Δφ между излучаемыми ортогонально линейно поляризованными электромагнитными волнами в точке приема на подвижном объекте.
Недостатком данного поляризационно-амплитудного способа измерения является ограниченные функциональные возможности, заключающиеся в том, что измеряется только один навигационный элемент - пеленг подвижного объекта - и невозможно измерить его угол крена.
Навигационная система для измерения пеленга подвижного объекта [6] содержит передатчик с подключенными к нему двумя передающими антеннами с ортогональными собственными линейными поляризациями и расположенными в точках с известными координатами в плоскости измерений на расстоянии d друг от друга и расположенные на подвижном объекте приемную всеполяризованную антенну, секцию круглого волновода с встроенной четвертьволновой фазовой пластиной, линейный поляризационный разделитель, амплитудный дискриминатор и вычислитель, при этом вход секции круглого волновода с встроенной четвертьволновой фазовой пластиной соединен с выходом приемной всеполяризованной антенны, а выход секции подключен к входу линейного поляризационного разделителя со стороны круглого волновода, а два его выхода со стороны прямоугольных волноводов подключены к соответствующим двум входам амплитудного дискриминатора, а его выход подключен к входу вычислителя, причем четвертьволновая фазовая пластина ориентирована под углом 45° к широкой стенке прямоугольного волновода одного из плеч линейного поляризационного разделителя.
Работа навигационной системы заключается в следующем.
Передатчик, через подключенные к нему две передающие антенны с ортогональными собственными линейными поляризациями, излучает ортогонально линейно поляризованные электромагнитные волны с равными амплитудами, фазами и длинами волн. На подвижном объекте суммарная электромагнитная волна (2) принимается всеполяризованной приемной антенной и поступает на последовательно соединенные секцию круглого волновода со встроенной четвертьволновой фазовой пластиной и линейный поляризационный разделитель, выполненный в виде круглого волновода с переходом на два ортогонально расположенных по отношению друг к другу прямоугольных волноводов. Сочетание секции круглого волновода со встроенной четвертьволновой фазовой пластиной и линейного поляризационного разделителя позволяет разделить поступающую на вход суммарную электромагнитную волну (2) на две ортогонально поляризованные по кругу волны с левым  и правым
и правым  направлением вращения вектора электрического поля, после чего сигналы с выходов плеч линейного поляризационного разделителя поступают на соответствующие входы амплитудного дискриминатора, на выходе которого формируется напряжение, равное отношению амплитуд EL/ER в виде (4). Затем вычислитель, по найденному отношению (4) в соответствии с (3), рассчитывает пеленг подвижного объекта.
направлением вращения вектора электрического поля, после чего сигналы с выходов плеч линейного поляризационного разделителя поступают на соответствующие входы амплитудного дискриминатора, на выходе которого формируется напряжение, равное отношению амплитуд EL/ER в виде (4). Затем вычислитель, по найденному отношению (4) в соответствии с (3), рассчитывает пеленг подвижного объекта.
К недостаткам данной навигационной системы [6] относятся ограниченные функциональные возможности, проявляющиеся в том, что измеряется только пеленг подвижного объекта и невозможно измерить его угол крена.
Поляризационно-фазовый способ измерения угла крена подвижного объекта заключается в том, что из двух точек с известными координатами, расположенных в плоскости измерений на расстоянии d друг от друга, одновременно излучают ортогонально линейно поляризованные электромагнитные волны с равными амплитудами, фазами и длинами волн, на борту подвижного объекта принимают суммарную электромагнитную волну в собственном круговом ортогональном поляризационном базисе, единичные орты которого соответствуют волнам с правой и левой круговой поляризациями, разделяют принятую суммарную электромагнитную волну на две ортогонально поляризованные по кругу составляющие правого  и левого
и левого  направления вращения вектора напряженности электрического поля, отличается от прототипа тем, что измеряют разность фаз между ними ΔφRL=φR-φL и по измеренной разности фаз ΔφRL рассчитывают угол крена γ между поперечной осью подвижного объекта и горизонтальной плоскостью, при этом точки излучения электромагнитных волн находятся в горизонтальной плоскости, излучаемые электромагнитные волны имеют линейные горизонтальную и вертикальную ориентации плоскости поляризации, совпадающие с горизонтальной плоскостью и перпендикуляром к этой плоскости соответственно, а прием суммарной электромагнитной волны осуществляется в собственном несинфазном круговом поляризационном базисе, в котором единичные орты соответствуют волнам с левой и правой круговой поляризациями, электрические векторы которых в начальный момент времени t=0 совпадают с горизонтальной и вертикальной ориентацией плоскости поляризации излучаемых электромагнитных волн и совпадают также с поперечной и вертикальной осями подвижного объекта соответственно, при этом абсолютные временные фазы волн между правой и левой круговыми поляризациями, образующими единичные орты кругового поляризационного базиса, отличаются на величину 90°.
направления вращения вектора напряженности электрического поля, отличается от прототипа тем, что измеряют разность фаз между ними ΔφRL=φR-φL и по измеренной разности фаз ΔφRL рассчитывают угол крена γ между поперечной осью подвижного объекта и горизонтальной плоскостью, при этом точки излучения электромагнитных волн находятся в горизонтальной плоскости, излучаемые электромагнитные волны имеют линейные горизонтальную и вертикальную ориентации плоскости поляризации, совпадающие с горизонтальной плоскостью и перпендикуляром к этой плоскости соответственно, а прием суммарной электромагнитной волны осуществляется в собственном несинфазном круговом поляризационном базисе, в котором единичные орты соответствуют волнам с левой и правой круговой поляризациями, электрические векторы которых в начальный момент времени t=0 совпадают с горизонтальной и вертикальной ориентацией плоскости поляризации излучаемых электромагнитных волн и совпадают также с поперечной и вертикальной осями подвижного объекта соответственно, при этом абсолютные временные фазы волн между правой и левой круговыми поляризациями, образующими единичные орты кругового поляризационного базиса, отличаются на величину 90°.
Установим связь разности фаз ΔφRL между ортогонально поляризованными по кругу составляющими правого  и левого
и левого  направления вращения вектора напряженности электрического поля с углом крена γ подвижного объекта, используя известный формализм векторов и матриц Джонса [7, 8]. Очевидно, чтобы установить искомую связь, необходимо представить суммарную электромагнитную волну
направления вращения вектора напряженности электрического поля с углом крена γ подвижного объекта, используя известный формализм векторов и матриц Джонса [7, 8]. Очевидно, чтобы установить искомую связь, необходимо представить суммарную электромагнитную волну  , заданную своими проекциями в линейном ортогональном поляризационном базисе в виде (2), в круговом ортогональном поляризационном базисе как линейную суперпозицию в виде:
, заданную своими проекциями в линейном ортогональном поляризационном базисе в виде (2), в круговом ортогональном поляризационном базисе как линейную суперпозицию в виде:

где базисные векторы  и
и  определяются как [7, 8]
определяются как [7, 8]
 и
и 
и соответствуют единичным волнам с левой и правой круговой поляризациями, заданными своими проекциями в линейном ортогональном поляризационном базисе.
Тогда суммарная электромагнитная волна  с произвольным состоянием поляризации, заданная своими проекциями в линейном ортогональном поляризационном базисе в виде (2), может быть определена на борту подвижного объекта, имеющего, в общем случае, крен ±γ, при переходе в круговой несинфазный ортогональный поляризационный базис, опустив временную зависимость сигналов, на входе приемника в виде:
с произвольным состоянием поляризации, заданная своими проекциями в линейном ортогональном поляризационном базисе в виде (2), может быть определена на борту подвижного объекта, имеющего, в общем случае, крен ±γ, при переходе в круговой несинфазный ортогональный поляризационный базис, опустив временную зависимость сигналов, на входе приемника в виде:

где  - нормированный, для удобства, вектор Джонса суммарной электромагнитной волны, заданный своими проекциями в линейном ортогональном поляризационном базисе, единичные орты
- нормированный, для удобства, вектор Джонса суммарной электромагнитной волны, заданный своими проекциями в линейном ортогональном поляризационном базисе, единичные орты  которого совпадают с осями ОХ и OY прямоугольной системы координат YOX;
которого совпадают с осями ОХ и OY прямоугольной системы координат YOX;
 - оператор поворота на произвольный угол крена ±γ,
- оператор поворота на произвольный угол крена ±γ,
 - оператор перехода из линейного ортогонального поляризационного базиса в круговой несинфазный ортогональный поляризационный базис [9], в котором в начальный момент времени t=0 абсолютные временные фазы волн правой и левой круговых поляризаций, образующих единичные орты кругового поляризационного базиса (6), отличаются на величину 90°.
- оператор перехода из линейного ортогонального поляризационного базиса в круговой несинфазный ортогональный поляризационный базис [9], в котором в начальный момент времени t=0 абсолютные временные фазы волн правой и левой круговых поляризаций, образующих единичные орты кругового поляризационного базиса (6), отличаются на величину 90°.
Подставляя в (7) значения +γ и осуществив необходимые матричные вычисления, получим аналитические выражения для ортогонально поляризованных по кругу составляющих левого  и правого
и правого  направления вращения на входе приемника в виде:
направления вращения на входе приемника в виде:

и

Используя известные соотношения [9], амплитуды AL и AR, а также фазы φL и φR сигналов (8) и (9) имеют вид:
 и
и 
 и
и 
Соответственно отношение амплитуд AL/AR и разность фаз ΔφRL ортогонально поляризованных по кругу составляющих  и
и  после преобразований для положительных углов крена +γ имеют вид:
после преобразований для положительных углов крена +γ имеют вид:


откуда следует, что:

Аналогично, подставляя в (7) значения -γ, получим аналитические выражения для ортогонально поляризованных по кругу составляющих левого  и правого
и правого  направления вращения на входе приемника в виде:
направления вращения на входе приемника в виде:


Соответственно амплитуды AL и AR, а также фазы φL и φR сигналов (17) и (18) имеют вид:
 и
и 
 и
и 
Выполнив необходимые преобразования, отношение амплитуд AL/AR и разность фаз ΔφRL=φR-φL ортогонально поляризованных по кругу составляющих  и
и  для отрицательных углов крена -γ имеют вид:
для отрицательных углов крена -γ имеют вид:

и

откуда следует, что

Из анализа (14) и (23) следует, что отношение амплитуд AL/AR ортогонально поляризованных по кругу составляющих  и
и  зависит только от разности фаз Δφ между излучаемыми ортогонально линейно поляризованными электромагнитными волнами в точке приема на подвижном объекте, т.е. зависит только от угловых координат подвижного объекта и не зависит от угла крена γ подвижного объекта. В то же время из анализа (15) и (24) видно, что разность фаз ΔφRL между ортогонально поляризованными по кругу составляющими
зависит только от разности фаз Δφ между излучаемыми ортогонально линейно поляризованными электромагнитными волнами в точке приема на подвижном объекте, т.е. зависит только от угловых координат подвижного объекта и не зависит от угла крена γ подвижного объекта. В то же время из анализа (15) и (24) видно, что разность фаз ΔφRL между ортогонально поляризованными по кругу составляющими  и
и  , наоборот, определяется только углом крена γ подвижного объекта и не зависит от его угловых координат. Сравнивая (16) и (25), окончательно имеем выражение для определения угла крена γ подвижного объекта в виде:
, наоборот, определяется только углом крена γ подвижного объекта и не зависит от его угловых координат. Сравнивая (16) и (25), окончательно имеем выражение для определения угла крена γ подвижного объекта в виде:

где «+» - соответствует положительному углу крена γ, когда правая, по ходу движения, поперечная ось подвижного объекта находится ниже горизонтальной плоскости,
«-» - соответствует отрицательному углу крена γ, когда правая, по ходу движения, поперечная ось подвижного объекта находится выше горизонтальной плоскости,
ΔφRL=φR-φL - разность фаз между ортогонально поляризованными по кругу составляющими правого  и левого
и левого  направления вращения на входе приемника [град.].
направления вращения на входе приемника [град.].
В случае, если из двух точек, расположенных в горизонтальной плоскости на расстоянии d друг от друга, излучать в равносигнальном направлении, совпадающем с перпендикуляром к середине базы d, соединяющей эти точки, ортогонально линейно поляризованные электромагнитные волны с равными амплитудами и длинами волн, но с начальной разностью фаз Δφ0=90°, то соотношения (14) и (23) преобразуются к виду:

что полностью согласуется с выражением (4), полученным в прототипе [6].
Таким образом, проводя сравнительный анализ полученных выражений (15) и (24), видим, что при появлении крена подвижного объекта одновременно возникает фазовый сдвиг между ортогонально поляризованными по кругу составляющими  и
и  суммарной электромагнитной волны
суммарной электромагнитной волны  , принятой на подвижном объекте в круговом поляризационном базисе, обусловленный, в общем случае, изменением угла ориентации эллипса поляризации (или плоскости поляризации) принятой суммарной электромагнитной волны. Последнее определяет физическую основу определения крена подвижного объекта по измеренной разности фаз ΔφRL между ортогонально поляризованными по кругу составляющими
, принятой на подвижном объекте в круговом поляризационном базисе, обусловленный, в общем случае, изменением угла ориентации эллипса поляризации (или плоскости поляризации) принятой суммарной электромагнитной волны. Последнее определяет физическую основу определения крена подвижного объекта по измеренной разности фаз ΔφRL между ортогонально поляризованными по кругу составляющими  и
и  .
.
Использование заявляемой совокупности признаков для измерения угла крена подвижного объекта в известных решениях автором не обнаружено.
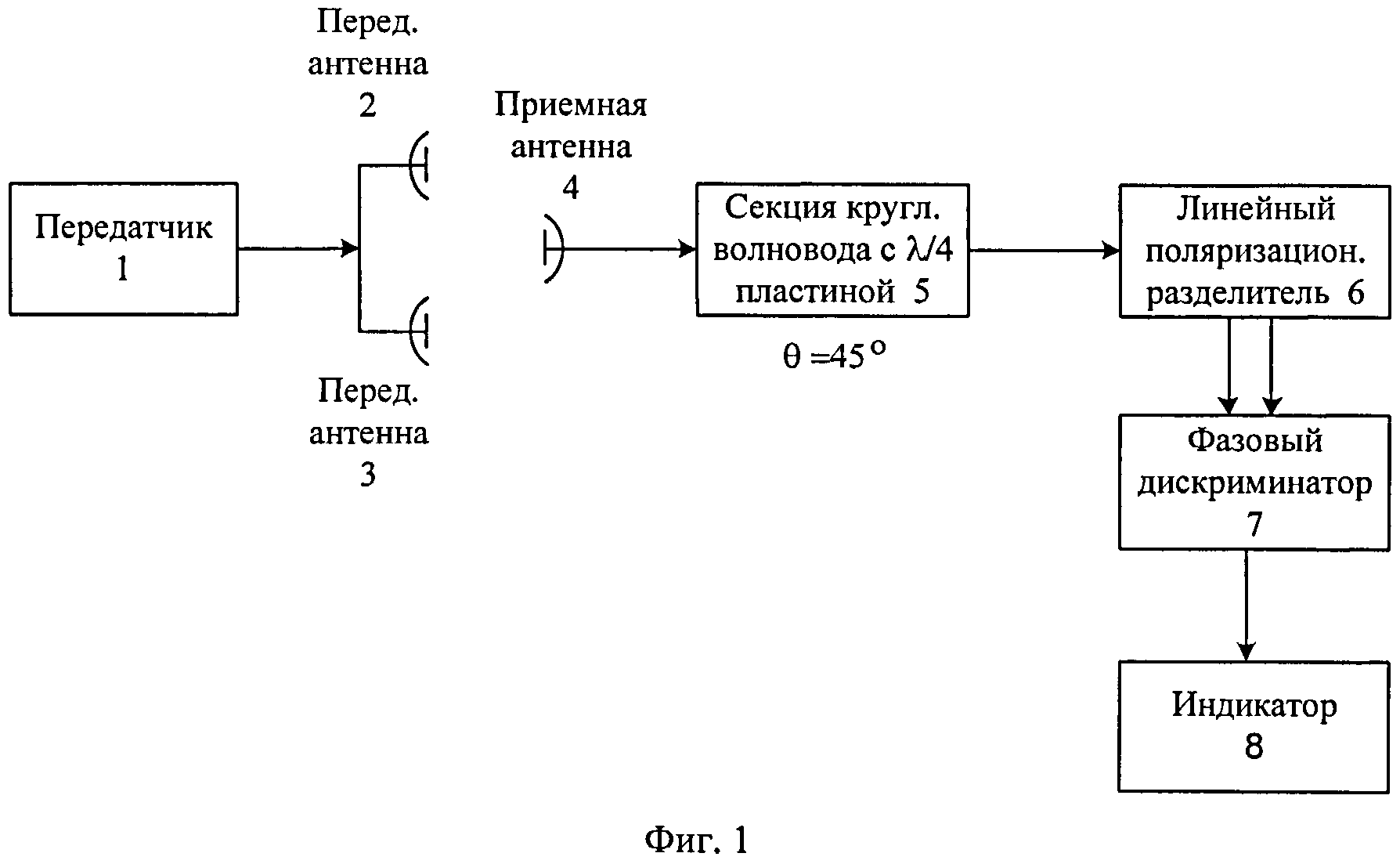
На фиг.1 представлена структурная электрическая схема радионавигационной системы, реализующей предложенный поляризационно-фазовый способ измерения угла крена подвижного объекта.
Радионавигационная система содержит передатчик 1, передающие антенны 2 и 3, расположенные в точках с известными координатами и разнесенные в горизонтальной плоскости на расстоянии d друг от друга, на борту подвижного объекта радионавигационная система содержит приемную всеполяризованную антенну 4, секцию круглого с встроенной внутрь четвертьволновой фазовой пластиной 5, линейный поляризационный разделитель 6, фазовый дискриминатор 7 и индикатор 8.
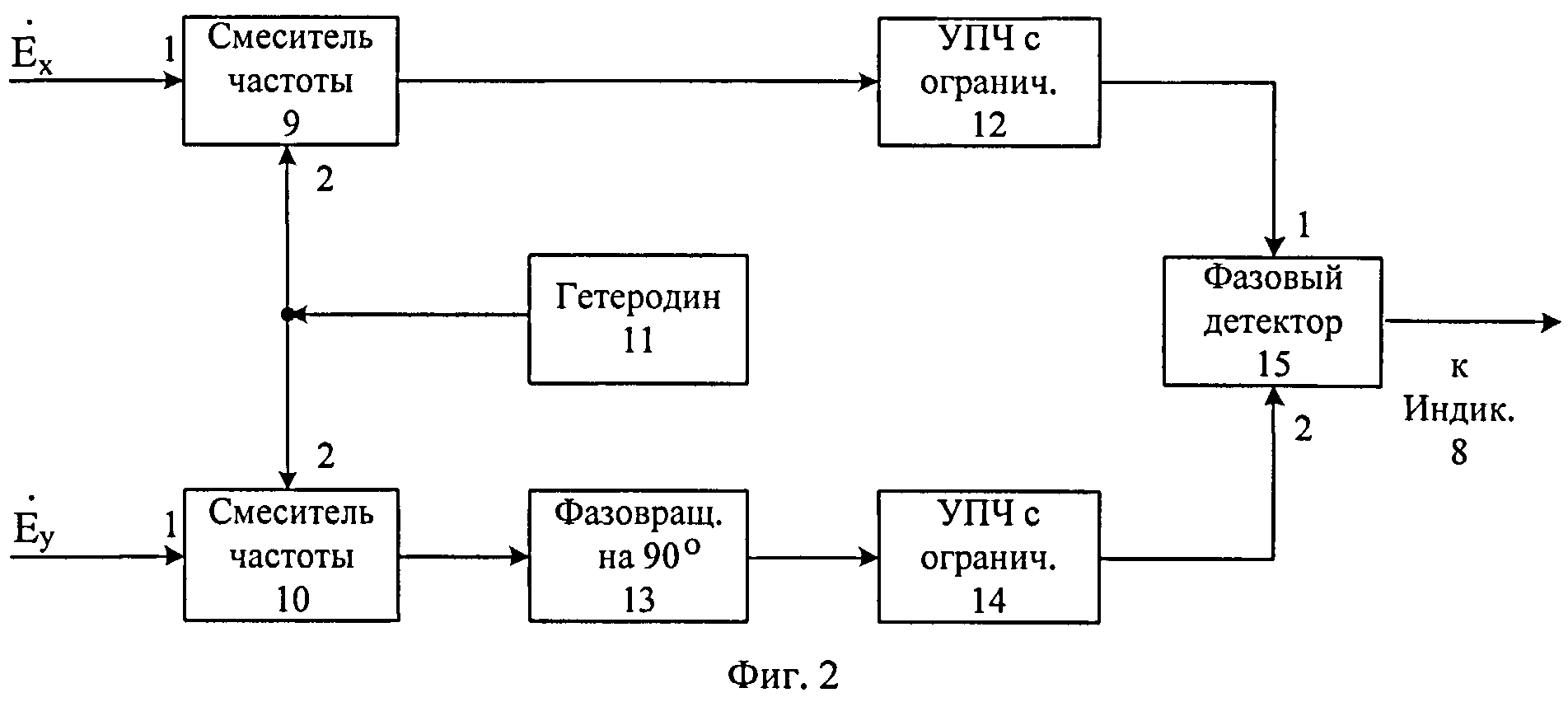
На фиг.2 представлена структурная электрическая схема фазового дискриминатора 7, включающего в себя первый и второй смесители частоты 9 и 10, гетеродин 11, первый усилитель промежуточной частоты (УПЧ) с ограничением по амплитуде 12, фазовращатель на 90° 13, второй УПЧ с ограничением по амплитуде 14, фазовый детектор 15.
Радионавигационная система работает следующим образом.
Передатчик 1 через подключенные к нему две передающие антенны 2 и 3 с ортогональными собственными линейными поляризациями излучает в направлении подвижного объекта ортогонально линейно поляризованные электромагнитные волны с горизонтальной и вертикальной ориентацией плоскости поляризации с равными амплитудами, фазами и длинами волн.
На подвижном объекте, имеющем, в общем случае, положительный +γ либо отрицательный -γ угол крена, суммарная электромагнитная волна  , вектор Джонса которой в направлении β, имеет вид (2) и задан своими проекциями в линейном ортогональном поляризационном базисе, единичные орты
, вектор Джонса которой в направлении β, имеет вид (2) и задан своими проекциями в линейном ортогональном поляризационном базисе, единичные орты  которого совпадают с осями ОХ и OY неподвижной опорной прямоугольной системы координат YOX соответственно, полностью принимается всеполяризованной приемной антенны 4. С выхода всеполяризованной приемной антенной 4 сигнал поступает на последовательно соединенные секцию круглого волновода с встроенной четвертьволновой фазовой пластиной 5 и линейный поляризационный разделитель 6, выполненный в виде перехода с круглого волновода на два ортогонально расположенных по отношению друг к другу прямоугольных волновода, орты собственной системы координат которого совпадают с осями плеч прямоугольных волноводов и совпадают также с вертикальной и поперечной осями подвижного объекта соответственно. При этом четвертьволновая фазовая пластина ориентирована под углом θ=45° к широкой стенке прямоугольного волновода одного из плеч линейного поляризационного разделителя 6. Сочетание секции круглого волновода с встроенной четвертьволновой фазой пластиной 5 и линейного поляризационного разделителя 6, позволяет, как известно [7-11], осуществить на борту подвижного объекта прием электромагнитных волн в круговом поляризационном базисе и, таким образом, разделить поступающую на вход секции круглого волновода с встроенной четвертьволновой фазовой пластиной 5 суммарную, в общем случае, эллиптически поляризованную, электромагнитную волну, вектор Джонса которой задан в виде (2), на две ортогонально поляризованные по кругу составляющие левого
которого совпадают с осями ОХ и OY неподвижной опорной прямоугольной системы координат YOX соответственно, полностью принимается всеполяризованной приемной антенны 4. С выхода всеполяризованной приемной антенной 4 сигнал поступает на последовательно соединенные секцию круглого волновода с встроенной четвертьволновой фазовой пластиной 5 и линейный поляризационный разделитель 6, выполненный в виде перехода с круглого волновода на два ортогонально расположенных по отношению друг к другу прямоугольных волновода, орты собственной системы координат которого совпадают с осями плеч прямоугольных волноводов и совпадают также с вертикальной и поперечной осями подвижного объекта соответственно. При этом четвертьволновая фазовая пластина ориентирована под углом θ=45° к широкой стенке прямоугольного волновода одного из плеч линейного поляризационного разделителя 6. Сочетание секции круглого волновода с встроенной четвертьволновой фазой пластиной 5 и линейного поляризационного разделителя 6, позволяет, как известно [7-11], осуществить на борту подвижного объекта прием электромагнитных волн в круговом поляризационном базисе и, таким образом, разделить поступающую на вход секции круглого волновода с встроенной четвертьволновой фазовой пластиной 5 суммарную, в общем случае, эллиптически поляризованную, электромагнитную волну, вектор Джонса которой задан в виде (2), на две ортогонально поляризованные по кругу составляющие левого  и правого
и правого  направления вращения вектора электрического поля. Причем, как известно [9-11], на выходе линейного поляризационного разделителя 6, со стороны ортогонально расположенных прямоугольных волноводов, ортогонально поляризованные по кругу составляющие
направления вращения вектора электрического поля. Причем, как известно [9-11], на выходе линейного поляризационного разделителя 6, со стороны ортогонально расположенных прямоугольных волноводов, ортогонально поляризованные по кругу составляющие  и
и  преобразуются в линейно ортогонально поляризованные электромагнитные волны
преобразуются в линейно ортогонально поляризованные электромагнитные волны  и
и  горизонтальной и вертикальной поляризациями соответственно. Причем, как известно [10-11], амплитуды Ax и Ay, а также фазы φx и φy этих ортогонально линейно поляризованных составляющих
горизонтальной и вертикальной поляризациями соответственно. Причем, как известно [10-11], амплитуды Ax и Ay, а также фазы φx и φy этих ортогонально линейно поляризованных составляющих  и
и  будут характеризовать собой амплитуды AL и AR, а также фазы φL и φR ортогонально поляризованных по кругу составляющих
будут характеризовать собой амплитуды AL и AR, а также фазы φL и φR ортогонально поляризованных по кругу составляющих  и
и  соответственно. В этом случае сигналы на выходах плеч линейного поляризационного разделителя 6, опустив временную зависимость сигналов, можно определить с помощью преобразований вида:
соответственно. В этом случае сигналы на выходах плеч линейного поляризационного разделителя 6, опустив временную зависимость сигналов, можно определить с помощью преобразований вида:


где  - нормированный, для удобства, вектор Джонса суммарной электромагнитной волны, заданный своими проекциями в линейном ортогональном поляризационном базисе, единичные орты
- нормированный, для удобства, вектор Джонса суммарной электромагнитной волны, заданный своими проекциями в линейном ортогональном поляризационном базисе, единичные орты  которого совпадают с осями ОХ и OY опорной прямоугольной системы координат YOX соответственно,
которого совпадают с осями ОХ и OY опорной прямоугольной системы координат YOX соответственно,
 - оператор поворота на произвольный угол крена ±γ соответственно,
- оператор поворота на произвольный угол крена ±γ соответственно,
 - оператор прямого перехода из опорной прямоугольной системы координат YOX в собственную систему координат четвертьволновой фазовой пластины λ/4, ориентированной под углом θ (λ - длина волны),
- оператор прямого перехода из опорной прямоугольной системы координат YOX в собственную систему координат четвертьволновой фазовой пластины λ/4, ориентированной под углом θ (λ - длина волны),
 - оператор Джонса четвертьволновой фазовой пластины λ/4, определенный в собственной системе координат, в которой он имеет диагональный вид,
- оператор Джонса четвертьволновой фазовой пластины λ/4, определенный в собственной системе координат, в которой он имеет диагональный вид,
 - оператор обратного перехода из собственной системы координат четвертьволновой фазовой пластины λ/4 в опорную прямоугольную систему координат YOX,
- оператор обратного перехода из собственной системы координат четвертьволновой фазовой пластины λ/4 в опорную прямоугольную систему координат YOX,
 - оператор первого плеча линейного поляризационного разделителя с горизонтальной собственной поляризацией, совпадающей с поперечной осью подвижного объекта,
- оператор первого плеча линейного поляризационного разделителя с горизонтальной собственной поляризацией, совпадающей с поперечной осью подвижного объекта,
 - оператор второго плеча линейного поляризационного разделителя с вертикальной собственной поляризацией, совпадающей вертикальной осью подвижного объекта.
- оператор второго плеча линейного поляризационного разделителя с вертикальной собственной поляризацией, совпадающей вертикальной осью подвижного объекта.
Подставляя в (28) и (29) значения +γ и θ=45° и проделав необходимые матричные вычисления, получим аналитические выражения для ортогонально линейно поляризованных сигналов  и
и  на выходах линейного поляризационного разделителя 6 вида:
на выходах линейного поляризационного разделителя 6 вида:


Используя известные соотношения [10, 11], найдем амплитуды Ax и Ay, а также фазы φx и φy сигналов  и
и  на выходе линейного поляризационного разделителя 6:
на выходе линейного поляризационного разделителя 6:



Найдем отношение амплитуд Ax/Ay и разность фаз Δφyx=φy-φx сигналов  и
и  на выходе линейного поляризационного разделителя 6:
на выходе линейного поляризационного разделителя 6:
 и
и 
откуда следует что:

Аналогично, подставляя в (28) и (29) значения -γ и θ=45° и проделав необходимые матричные вычисления, получим аналитические выражения для ортогонально линейно поляризованных сигналов  и
и  на выходах линейного поляризационного разделителя 6 вида:
на выходах линейного поляризационного разделителя 6 вида:


Соответственно, амплитуды Ax и Ay, а также фазы φx и φy сигналов (39) и (40) на выходах линейного поляризационного разделителя 6 имеют вид:


Найдем отношение амплитуд Ax/Ay и разность фаз Δφyx=φy-φx сигналов  и
и  на выходе линейного поляризационного разделителя 6, для отрицательных углов крена -γ:
на выходе линейного поляризационного разделителя 6, для отрицательных углов крена -γ:
 и
и 
откуда следует что:

Из анализа (36) и (45) следует, что отношение амплитуд Ax/Ay выходных сигналов  и
и  линейного поляризационного разделителя 6 зависит только от разности фаз Δφ между излучаемыми ортогонально линейно поляризованными электромагнитными волнами в точке приема на подвижном объекте, т.е. зависит только от угловых координат подвижного объекта и не зависит от его угла крена γ. В то же время из анализа (37) и (46) видно, что разность фаз Δφyx=φy-φx между выходными сигналами
линейного поляризационного разделителя 6 зависит только от разности фаз Δφ между излучаемыми ортогонально линейно поляризованными электромагнитными волнами в точке приема на подвижном объекте, т.е. зависит только от угловых координат подвижного объекта и не зависит от его угла крена γ. В то же время из анализа (37) и (46) видно, что разность фаз Δφyx=φy-φx между выходными сигналами  и
и  линейного поляризационного разделителя 6, наоборот, определяется только углом крена γ подвижного объекта и не зависит от его угловых координат. Сравнивая (38) и (47), окончательно имеем выражение для определения угла крена у подвижного объекта в виде:
линейного поляризационного разделителя 6, наоборот, определяется только углом крена γ подвижного объекта и не зависит от его угловых координат. Сравнивая (38) и (47), окончательно имеем выражение для определения угла крена у подвижного объекта в виде:

где «+» соответствует положительному углу крена γ, когда правая, по ходу движения, поперечная ось подвижного объекта находится ниже горизонтальной плоскости,
«-» соответствует отрицательному углу крена γ, когда правая, по ходу движения, поперечная ось подвижного объекта находится выше горизонтальной плоскости,
Δφyx=φy-φx - разность фаз между ортогонально линейно поляризованными сигналами  и
и  на выходе линейного поляризационного разделителя.
на выходе линейного поляризационного разделителя.
В случае если из двух точек, расположенных в горизонтальной плоскости на расстоянии d друг от друга, передающие антенны 2 и 3 излучают в равносигнальном направлении, совпадающем с перпендикуляром к середине базы d, ортогонально линейно поляризованные электромагнитные волны с равными амплитудами и длинами волн, но с начальной разностью фаз Δφ0=90°, то соотношения (36) и (45) преобразуются к виду:

что полностью согласуется с выражением (4), полученным в прототипе [6].
С выходов плеч линейного поляризационного разделителя 6 ортогонально линейно поляризованные сигналы  и
и  поступают на входы фазового дискриминатора 7 (см. фиг.2), т.е. поступают соответственно на первые входы смесителей 9 и 10, а на их вторые входы поступает сигнал с выхода гетеродина 11, после чего сигнал
поступают на входы фазового дискриминатора 7 (см. фиг.2), т.е. поступают соответственно на первые входы смесителей 9 и 10, а на их вторые входы поступает сигнал с выхода гетеродина 11, после чего сигнал  с выхода первого смесителя частоты 9 поступает на вход первого УПЧ с ограничением по амплитуде 12, а сигнал
с выхода первого смесителя частоты 9 поступает на вход первого УПЧ с ограничением по амплитуде 12, а сигнал  с выхода второго смесителя частоты 10 через фазосдвигающую цепь на 90° 13 поступает на вход второго УПЧ с ограничением по амплитуде 14. В УПЧ 12 и 14, имеющих идентичные амплитудно-фазочастотные характеристики, осуществляется усиление сигналов промежуточной частоты, а также производится их нормировка за счет амплитудного ограничения усиливаемых сигналов промежуточной частоты с порогом ограничения U0. Затем выходной сигнал УПЧ 12 поступает на первый вход фазового детектора 15, а выходной сигнал УПЧ 14 поступает на второй вход фазового детектора 15. На выходе фазового детектора 15 формируется сигнал, пропорциональный синусу разности фаз Δφyx=φy-φx входных сигналов и имеет вид:
с выхода второго смесителя частоты 10 через фазосдвигающую цепь на 90° 13 поступает на вход второго УПЧ с ограничением по амплитуде 14. В УПЧ 12 и 14, имеющих идентичные амплитудно-фазочастотные характеристики, осуществляется усиление сигналов промежуточной частоты, а также производится их нормировка за счет амплитудного ограничения усиливаемых сигналов промежуточной частоты с порогом ограничения U0. Затем выходной сигнал УПЧ 12 поступает на первый вход фазового детектора 15, а выходной сигнал УПЧ 14 поступает на второй вход фазового детектора 15. На выходе фазового детектора 15 формируется сигнал, пропорциональный синусу разности фаз Δφyx=φy-φx входных сигналов и имеет вид:
 или с учетом (48)
или с учетом (48)

где U0=const.
С выхода фазового детектора 15 сигнал поступает на вход индикатора 8, шкала которого проградуирована, с учетом (51), в градусах угла крена у подвижного объекта.
В 3-сантиметровом диапазоне волн заявляемая радионавигационная система измерения угла крена подвижного объекта может быть выполнена следующим образом.
В качестве передатчика 1 может использоваться, например, стандартный генератор высокочастотных колебаний типа ГЧ-83.
В качестве передающих антенн 2 и 3 может быть использована рупорная антенна [12] с горизонтальной и вертикальной собственными поляризациями.
Приемная антенна 4 может быть выполнена в виде круглого рупора [13].
Линейный поляризационный разделитель 6 выполнен в виде волновода круглого сечения с переходом на два ортогонально расположенных волновода прямоугольного сечения [10].
Фазовый дискриминатор 7 может быть выполнен по известной [14] схеме фазо-фазовой моноимпульсной системы.
Индикатор 8 может быть выполнен в виде стрелочного прибора, шкала которого прокалибрована в градусах угла крена подвижного объекта.
Заявляемые поляризационно-фазовый способ и радионавигационная система измерения угла крена подвижного объекта позволяют расширить функциональные возможности радионавигационной системы определения пеленга подвижного объекта за счет измерения дополнительного навигационного элемента - угла крена подвижного объекта. При этом, по сравнению с широко используемыми средствами измерения крена подвижного объекта, основанными на применении гироскопических систем ориентации, заявляемые поляризационно-фазовый способ и радионавигационная система измерения крена подвижного объекта позволяют избежать постоянного накапливания с течением времени ошибки измерения.
Источники информации
1. Александров А.С., Арно Г.Р. и др. Современное состояние и тенденции развития зарубежных средств и систем навигации подвижных объектов военного и гражданского назначения. - Санкт-Петербург, 1994. - 119 с.
2. Пельпор Д.С., Ягодкин В.В. Гироскопические системы. - М., Высшая школа, 1977. - 216 с.
3. Агаджапов П.А., Воробьев В.Г. и др. Автоматизация самолетовождения и управления воздушным движением. - М.: Транспорт, 1980. - 357 с.
4. Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь, 1985. - 344 с.
5. Бадулин Н.Н., Гулько В.Л. Способ измерения пеленга подвижного объекта и устройство для его осуществления. - Патент SU №1251003, М. кл.4, G01S 3/02, приоритет от 29.01.1985.
6. Бадулин Н.Н., Гулько В.Л. Навигационная система для определения пеленга. - Авт.св. СССР №1355955, М. кл.4, G01S 3/02, приоритет от 9.12.1985.
7. Шерклифор У. Поляризованный свет. - М.: Мир, 1965. - 264 с.
8. Азам Р., Башара П. Эллипсометрия и поляризованный свет. - М.: Мир, 1981. - 588 с.
9. Богородский В.В., Канарейкин Д.Б., Козлов А.И. Поляризация рассеянного и собственного радиоизлучения земных покровов. - Л.: Гидрометеоиздат, 1981. - 280 с.
10. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация радиолокационных сигналов. - М.: «Советское радио», 1966. - 440 с.
11. Канарейкин Д.Б., Потехин В.А., Шишкин Н.Ф. Морская поляриметрия. - Л.: Судостроение, 1968. - 327 с.
12. Драбкин А.Л. и др. Антенно-фидерные устройства. - М.: «Советское радио», 1974. - 535 с.
13. Жук М.С., Молочков Ю.Б. Проектирование антенно-фидерных устройств. - М.: «Энергия», 1966.




Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ приготовления бетонной смеси
Способ измерения угла крена подвижного объекта и устройство для его реализации
Способ контроля и ремонта изоляции проводов
Радионавигационная система для измерения пеленга подвижного объекта
Радионавигационная система для измерения пеленга подвижного объекта
Способ изготовления трубчатого соединения алюмооксидной керамики с металлом
Способ спекания изделий диэлектрической керамики
Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ приготовления бетонной смеси
Способ измерения угла крена подвижного объекта и устройство для его реализации
Способ контроля и ремонта изоляции проводов
Радионавигационная система для измерения пеленга подвижного объекта
Радионавигационная система для измерения пеленга подвижного объекта
Способ изготовления трубчатого соединения алюмооксидной керамики с металлом
Способ спекания изделий диэлектрической керамики
Способ измерения угла крена летательного аппарата и устройство для его реализации

