Результат интеллектуальной деятельности: РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПЕЛЕНГА ПОДВИЖНОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к радионавигации и может использоваться в навигационных системах для решения задач определения местоположения подвижных объектов.
Известна радионавигационная система [1, 2], которая содержит источник электромагнитных волн, расположенный в точке с известными координатами и расположенные на подвижном объекте последовательно соединенные антенну, приемник и индикатор.
Недостатком этой радионавигационной системы является низкая точность измерений пеленга подвижного объекта при наличии ограничений на габариты приемной антенны. Этот недостаток обусловлен тем, что точность измерений главным образом определяется шириной диаграммы направленности приемной антенны. В свою очередь, ширина диаграммы направленности однозначно определяется размерами антенны, чем больше диаметр антенны, тем уже диаграмма направленности и, соответственно, тем выше точность измерений пеленга подвижного объекта.
Известна радионавигационная система [3, 4], в которой пеленг подвижного объекта определяется на основе измерения разности фаз напряжений на выходе двух разнесенных в пространстве приемных антенн. Эта система содержит источник электромагнитных волн, расположенный в точке с известными координатами и расположенные на подвижном объекте две разнесенные в пространстве приемные антенны, каждая из которых последовательно соединена с соответствующим приемником, фазометр и счетно-решающее устройство, причем выходы приемников подключены к соответствующим двум входам фазометра, а его выход подключен к входу счетно-решающего устройства. Фазометр измеряет разность фаз напряжений на выходе приемников, а счетно-решающее устройство по измеренной разности фаз определяет пеленг подвижного объекта.
Недостаток этой радионавигационной системы заключается в низкой точности измерений пеленга подвижного объекта при наличии жестких ограничений на габариты приемных антенн. Этот недостаток обусловлен тем, что точность измерений пеленга подвижного объекта определяется пространственным разносом приемных антенн. Чем больше расстояние между антеннами, тем выше точность измерений и, наоборот, при уменьшении расстояния между приемными антеннами точность измерений пеленга подвижного объекта снижается.
Известна радионавигационная система для измерения пеленга подвижного объекта [5]. Она содержит радиомаяк, расположенный в точке с известными координатами и приемо-индикатор, расположенный на подвижном объекте. Радиомаяк содержит передатчик с подключенными к нему, через синхронный переключатель, трех передающих антенн. Приемо-индикатор содержит приемную антенну, выход которой соединен с входом приемника, а его выход через синхронный переключатель подключен к трем приемным каналам и фазометр, два входа которого с помощью переключателя подключены к выходам любой из пар приемных каналов. Работа системы основана на поочередном, во времени, излучении электромагнитных волн из двух (или трех) точек с известными координатами, расположенных в плоскости измерений на расстоянии d друг от друга. Причем длины и амплитуды излучаемых электромагнитных волн равны и начальные фазы совпадают. На подвижном объекте последовательно во времени принимаются электромагнитные волны от любой из пар передающих антенн и измеряется их разность фаз, после чего рассчитывается пеленг подвижного объекта.
Недостатком этой радионавигационной системы является низкое быстродействие измерений пеленга подвижного объекта, обусловленное временной селекцией передаваемых и, соответственно, принимаемых сигналов.
Известна радионавигационная система для измерения пеленга подвижного объекта (А.с. №1355955, М кл.4 G01S, 3/02, приоритет от 9.12.1985 [6]), в которой пеленг подвижного объекта определяется на основе измерения разности фаз Δφ между ортогонально линейно поляризованными электромагнитными волнами, одновременно излучаемыми с равными амплитудами, фазами и длинами волн из двух точек с известными координатами и расположенных в плоскости измерений на расстоянии d друг от друга. При этом пеленг α подвижного объекта определяется относительно равносигнального направления, совпадающего с нормалью к середине линии, соединяющей точки излучений ортогонально поляризованных электромагнитных волн по формуле [7]:

где:
λ - длина волны.
Навигационная система содержит передатчик с подключенными к нему двумя передающими антеннами с ортогональными линейными поляризациями. На подвижном объекте навигационная система содержит приемную всеполяризованную антенну, секцию круглого волновода с встроенной четвертьволновой фазовой пластиной, линейный поляризационный разделитель, амплитудный дискриминатор и вычислитель. При этом вход секции круглого волновода с встроенной четвертьволновой фазовой пластиной подключен к выходу приемной всеполяризованной антенны, а ее выход подключен к входу линейного поляризационного разделителя со стороны круглого волновода, два выхода которого со стороны прямоугольных волноводов подключены к соответствующим двум входам амплитудного дискриминатора, выход которого подключен к входу вычислителя. Причем четвертьволновая фазовая пластина ориентирована под углом 45° к одной из стенок прямоугольного волновода линейного поляризационного разделителя.
Навигационная система для определения пеленга работает следующим образом.
Передатчик через подключенные к нему две передающие антенны, расположенные в точке с известными координатами в плоскости измерений на расстоянии d друг от друга, излучает линейно ортогонально поляризованные электромагнитные волны с равными амплитудами, фазами и длинами волн.
На подвижном объекте суммарная электромагнитная волна полностью принимается всеполяризованной приемной антенной и поступает на последовательно соединенные секцию круглого волновода со встроенной четвертьволновой фазовой пластиной и линейный поляризационный разделитель. Причем фазовая пластина ориентирована под углом 45° к одной из стенок прямоугольного волновода линейного поляризационного разделителя. Сочетание секции круглого волновода со встроенной четвертьволновой фазовой пластиной и линейного поляризационного разделителя позволяет осуществить на подвижном объекте прием суммарной электромагнитной волны в круговом поляризационном базисе и, таким образом, разделить поступающую на вход суммарную электромагнитную волну на две ортогонально поляризованные по кругу волны. Последнее, как отмечается в [6], позволяет исключить влияние угла крена подвижного объекта на точность измерения его пеленга.
Затем сигналы с выходов плеч линейного поляризационного разделителя поступают на амплитудный дискриминатор, на выходе которого формируется напряжение, равное отношению амплитуд E1/E2 сигналов в виде [6]

Соотношение (2) является пеленгационной характеристикой угломерной навигационной системы. Причем напряжение на выходе амплитудного дискриминатора зависит только от разности фаз Δφ между ортогонально линейно поляризованными электромагнитными волнами, принимаемыми на подвижном объекте, и не завит от крена подвижного объекта [6].
Из (2) следует, что

где n=0, 1, 2, ….
Выходной сигнал амплитудного дискриминатора поступает на вычислитель, где по измеренному отношению амплитуд сигналов с выходов плеч линейного поляризационного разделителя, с учетом (3) и (1), рассчитывается пеленг подвижного объекта по формуле [6]

Этой навигационной системе присущ ряд недостатков. Во-первых, обладает низкой точностью измерения пеленга подвижного объекта на направлениях, близких к равносигнальному направлению, обусловленной небольшой крутизной пеленгационной характеристики (2) в указанных направлениях. Во-вторых, не возможно определить сторону отклонения подвижного объекта от равносигнального направления, поскольку отношение амплитуд E1/E2 на выходе амплитудного дискриминатора есть величина всегда положительная, то пеленгационная характеристика (2) имеет симметричный вид относительно равносигнального направления. B-третьих, соотношение (2) справедливо при соблюдении следующих двух условий: первое условие заключается в том, что фазовая пластина, расположенная внутри секции круглого волновода, должна быть строго четвертьволновой, а второе условие - фазовая пластина должна быть ориентирована строго под углом 45° к одной из стенок прямоугольного волновода линейного поляризационного разделителя. Не соблюдение хотя бы одного из перечисленных условий приведет неизбежно к тому, что поляризационный базис, в котором принимаются ортогонально поляризованные электромагнитные волны, становится, в общем случае, эллиптическим [8]. Тогда отношение амплитуд E1/E2 на выходе амплитудного дискриминатора будет зависеть не только от разности фаз Δφ двух принятых сигналов, но и от угла эллиптичности и угла ориентации собственных векторов эллиптического поляризационного базиса, в котором осуществляется прием электромагнитных волн. Последнее означает, что отношение амплитуд E1/E2 будет также зависеть и от угла крена подвижного объекта, что приведет к искажению пеленгационной характеристики (2) и, следовательно, приведет к ошибке в измерении пеленга α.
Наиболее близким по совокупности признаков к заявляемой радионавигационной системе является устройство для измерения пеленга подвижного объекта (патент СССР №1251003 М. кл.4 G01S, 3/02, приоритет от 29.01.85) [7]. Это устройство содержит передатчик с подключенными к нему двумя передающими антеннами с ортогональными собственными поляризациями и расположенными в точках с известными координатами в плоскости измерений на расстоянии d друг от друга и расположенных на подвижном объекте приемную всеполяризованную антенну, линейный поляризационный разделитель, амплитудно-фазовый дискриминатор и вычислитель, при этом выход приемной всеполяризованной антенны подключен к входу линейного поляризационного разделителя, а два его выхода подключены к двум входам амплитудно-фазового дискриминатора, а его выход подключен к входу вычислителя, причем линейный поляризационный разделитель ориентирован так, что орты его собственной системы координат совпадаю с осями плеч прямоугольных волноводов и ориентированы под углом θ=45° к плоскости измерений.
Работа устройства заключается в том, что передатчик через подключенные к нему двумя передающими антеннами одновременно из двух точек излучают ортогонально эллиптически поляризованные электромагнитные волны с равными амплитудами, фазами и длинами волн.
На подвижном объекте суммарная электромагнитная волна, вектор Джонса которой в декартовом поляризационном базисе имеет вид [7]

где ε - угол эллиптичности излучаемых ортогонально поляризованных электромагнитных волн,. 2nd.,
 - фазовый сдвиг между ортогонально эллиптически поляризованными электромагнитными волнами в точке приема в направлении α, (λ - длина волны),
- фазовый сдвиг между ортогонально эллиптически поляризованными электромагнитными волнами в точке приема в направлении α, (λ - длина волны),
полностью принимается всеполяризованной приемной антенной, после чего сигнал поступает на вход линейного поляризационного разделителя, орты собственной системы координат которого совпадают с осями плеч прямоугольных волноводов и ориентированы под углом θ=45° к плоскости измерений. Линейный поляризационный разделитель разделяет поступающую на его вход суммарную электромагнитную волну, на две линейные ортогональные по поляризации электромагнитные волны. В этом случае сигналы на выходах плеч линейного поляризационного разделителя, опуская временную зависимость сигналов, определяются с помощью преобразований [7]


где  - оператор перехода из декартового поляризационного оазиса, в котором записаны векторы Джонса излучаемых волн, в систему координат поляризационного разделителя;
- оператор перехода из декартового поляризационного оазиса, в котором записаны векторы Джонса излучаемых волн, в систему координат поляризационного разделителя;
 - оператор поляризатора первого плеча линейного поляризационного разделителя;
- оператор поляризатора первого плеча линейного поляризационного разделителя;
 - оператор поляризатора второго плеча линейного поляризационного разделителя.
- оператор поляризатора второго плеча линейного поляризационного разделителя.
После преобразований получим аналитические выражения для сигналов  и
и  на выходе линейного поляризационного разделителя вида:
на выходе линейного поляризационного разделителя вида:


С выходов плеч линейного поляризационного разделителя сигналы, описываемые аналитическими выражениями (6) и (7), поступают на входы амплитудно-фазового дискриминатора. Причем сигнал
поступает на вход разностного канала, а сигнал
поступает на вход суммарного канала амплитудно-фазового дискриминатора. Амплитуды A1 и A2 сигналов
и
на входе амплитудно-фазового дискриминатора имеют вид [7]


Из анализа (8) и (9) видно, что амплитуды A1 и A2 сигналов
и
на входе амплитудно-фазового дискриминатора зависят не только от измеряемого параметра разности фаз Δφ, но и от угла эллиптичности ε излучаемых электромагнитных волн и от угла ориентации θ собственной системы координат линейного поляризационного разделителя относительно плоскости измерений. При θ=45° амплитуды A1 и A2, а также фазы ψ1 и ψ2 сигналов
и
на входе амплитудно-фазового дискриминатора имеют вид [7]


а их разность фаз имеет вид

Таким образом, при θ=45° амплитуды A1 и A2 зависят только от измеряемого параметра разности фаз Δφ между принимаемыми на подвижном объекте ортогонально эллиптически поляризованными электромагнитными волнами от первой и второй передающих антенн и не зависят от угла эллиптичности е этих волн. В то же время разность фаз Δψ между сигналами
и
на входе амплитудно-фазового дискриминатора постоянна и, наоборот, определяется только углом эллиптичности ε излучаемых ортогонально поляризованных электромагнитных волн и не зависит от измеряемого параметра разности фаз Δφ.
Для обеспечения нормальной работы амплитудно-фазового дискриминатора необходимо, как отмечается в [7], чтобы разность фаз между сигналами, поступающими на его вход, была равна 90°, а амплитуды A1 и A2 сигналов
и
определялись выражениями (10) и (11). Из анализа (14) видно, что для передающих антенн, излучающих линейно ортогонально поляризованные электромагнитные волны с углом эллиптичности ε=0°, это условие выполняется. В случае, если передающие антенны излучают в общем случае ортогонально эллиптические поляризованные электромагнитные волны с углом эллиптичности s, то, как следует из (14), их разность фаз отличается от 90° на величину, равную удвоенному углу эллиптичности ε излучаемых электромагнитных волн. В этом случае необходимо излучать электромагнитные волны с равной амплитудой и длиной волны, но с начальной разностью фаз, равной удвоенному углу эллиптичности ε [7].
В амплитудно-фазовом дискриминаторе происходит преобразование по частоте и усиление с учетом работы автоматической регулировки усиления, осуществляющей на промежуточной частоте нормировку сигналов
и
относительно сигнала
. В результате на выходе амплитудно-фазового дискриминатора формируется выходное напряжение, знак которого учитывает знак разности фаз Δφ сравниваемых сигналов
и
, пропорциональное отношению вида [7]

где α - угол между перпендикуляром к середине базы d, образованной передающими антеннами и направлением на подвижный объект,
k - коэффициент пропорциональности, зависящий от идентичности амплитудно-частотных и фазо-частотных характеристик приемных каналов.
Полагая k=1 из (15) следует, что

где n=0, 1, 2, ….
С выхода амплитудно-фазового дискриминатора сигнал поступает на вычислитель, где с учетом (16) и (1) производится операция расчета пеленга а подвижного объекта по формуле

Зависимость измеряемого отношения A1/A2 (15) от угловой координаты α подвижного объекта, по сути является пеленгационной характеристикой угломерного устройства. Пользуясь соотношением (15), с учетом (5), можно показать, что крутизна пеленгационной характеристики в точке α=0 определяется соотношением

Из (18) следует, что для обеспечения высокой точности измерений пеленга α необходимо иметь возможно бóльшую крутизну пеленгационной характеристики, которая в свою очередь, определяется ростом отношения d/λ.
Недостатком этого устройства является низкая точность измерений пеленга подвижного объекта.
Во-первых, этот недостаток обусловлен низкой крутизной пеленгационной характеристики (15) угломерного устройства на равносигнальном направлении и на направлениях близких к равносигнальному.
Во-вторых, при определении пеленга подвижного объекта необходимо строго соблюдать требование к ориентации линейного поляризационного разделителя под углом θ=45° относительно плоскости измерений. Только при этом необходимом и достаточном условии, как следует из (15), отношение амплитуд A1/A2 сигналов
и
с выходов плеч линейного поляризационного разделителя зависит только от искомой угловой координаты α подвижного объекта. Однако, приемная антенна и линейный поляризационный разделитель располагаются на подвижном и при возникновении крена подвижного объекта необходимое требование к ориентации линейного поляризационного разделителя под углом 45° к плоскости измерений не соблюдается и, в общем случае, θ≠45°. Причем, даже при принятии специальных мер по гиростабилизации приемной антенны и линейного поляризационного разделителя, с целью компенсации крена путем использования известных гироскопических систем ориентации [9-11], то все равно происходит постепенное накапливание ошибки компенсации крена с течением времени.
Так, например, применительно к летательным аппаратам, за один час полета ошибка составляет величину единицы градусов [10, 11], что, в нашем случае, на прямую приведет к ошибкам в определении пеленга подвижного объекта.
Для доказательства проведем теоретический анализ точности измерений пеленга α подвижного объекта от угла ориентации θ собственной системы координат линейного поляризационного разделителя относительно плоскости измерений.
Чтобы исключить влияние угла эллиптичности ε излучаемых электромагнитных волн на точность измерения пеленга α подвижного объекта, анализ проведем для случая, когда передающие антенны излучают ортогонально линейно поляризованные электромагнитные волны, угол эллиптичности которых ε=0°.
Тогда подставляя в (8) и (9) значение ε=0° получим


Из анализа (19) и (20) следует, что амплитуды A1 и A2 сигналов
и
с выходов плеч линейного поляризационного разделителя зависят не только от измеряемого параметра разности фаз Δφ между принимаемыми, на борту подвижного объекта, ортогонально линейно поляризованными электромагнитными волнами от первой и второй передающих антенн, но и от угла ориентации θ линейного поляризационного разделителя относительно плоскости измерений.
Подставляя (19) и (20) в (17) получим выражение для расчета пеленга α подвижного объекта вида:

Из анализа (21) следует, что в общем случае, когда θ≠45° пеленг α подвижного объекта зависит не только от искомого измеряемого параметра разности фаз Δφ, но и от ориентации θ линейного поляризационного разделителя относительно плоскости измерений. Последнее приведет к искажению пеленгационной характеристики (15) и, следовательно, приведет к ошибке определения пеленга α подвижного объекта.
Используя (21), исследуем зависимость ошибки измерения пеленга δα подвижного объекта от угла ориентации θ линейного поляризационного разделителя относительно плоскости измерений.
По определению [12], ошибка измерения пеленга δα определяется как разность между измеренным значением αизм и истинным значением αист угловой координаты подвижного объекта и определяется как

При этом истинная угловая координата αист определяется в соответствии с (1) и устанавливает связь между истинным значением αист и истинной разностью фаз Δφ между ортогонально линейно поляризованными электромагнитными волнами в точке приема на входе приемной всеполяризованной антенны (или на входе линейного поляризационного разделителя).
В свою очередь, измеренная угловая координата подвижного объекта αизм рассчитывается в соответствии с полученным выражением (21) и устанавливает связь между измеренным значением угловой координаты αизм и измеренной, с учетом (16), разностью фаз Δφизм по отношению амплитуд A1/A2 сигналов
и
с выходов плеч линейного поляризационного разделителя, ориентированного под углом θ относительно плоскости измерений. Из анализа (21) видно, что установленная связь между αизм и Δφизм неоднозначна. Ширина зоны однозначного отсчета Δα в районе направлений, близких к нулевому, может быть определена из соотношения (21) подстановкой n=0 и A1/A2=∞, т.е.

При этом однозначное измерение разности фаз Δφизм, с учетом (15),; возможно в пределах (-π÷π) радиан. Тогда, подставляя (21) и (1) в (22) и полагая n=0, получим выражение для расчета ошибки измерения пеленга подвижного объекта δα в виде

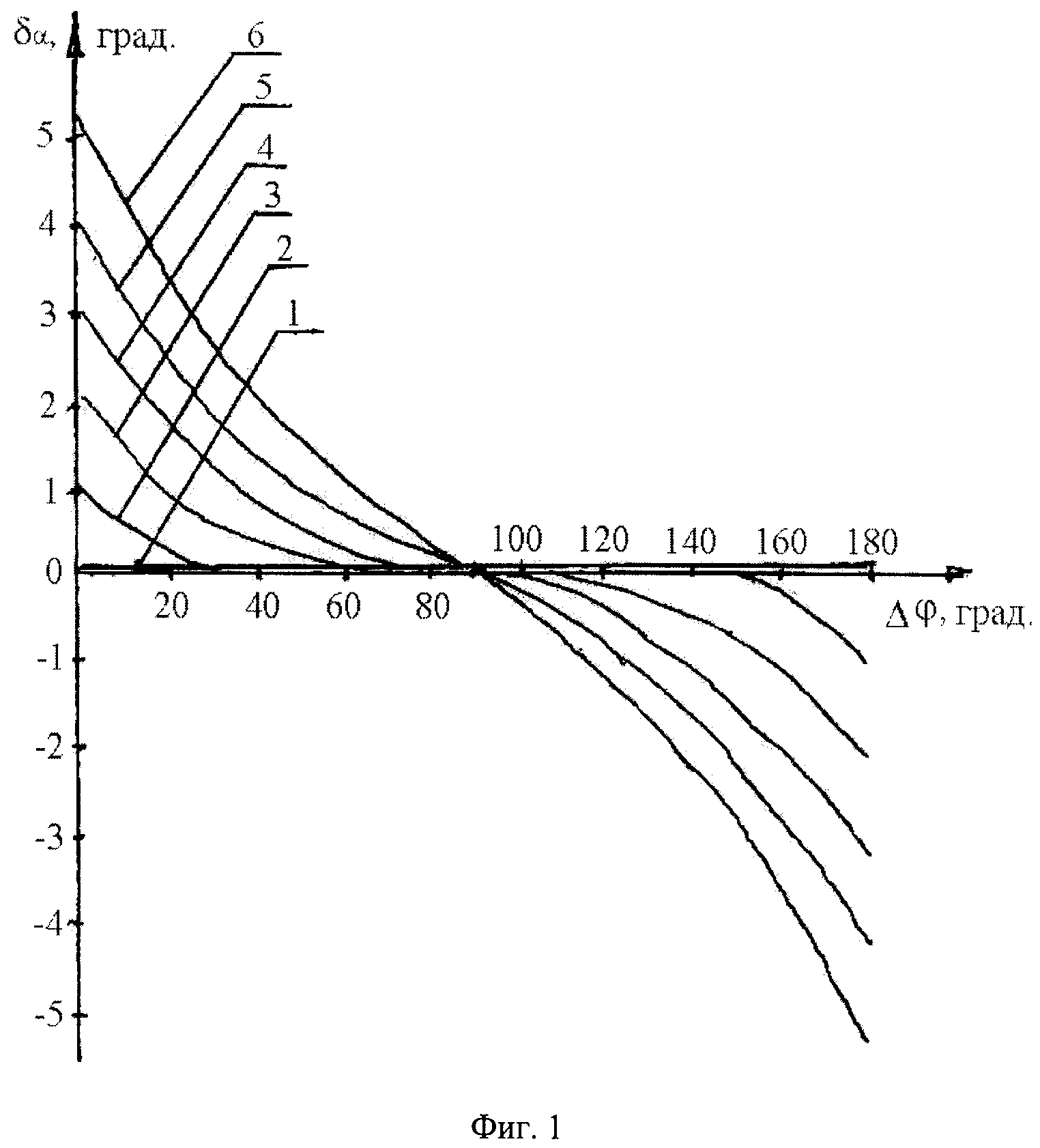
На фиг.1 представлена расчетная, в соответствии с (24), зависимость ошибки измерения пеленга δα подвижного объекта от истинной разности фаз Δφ в диапазоне изменения (0÷180°), для различных значений угла ориентации θ линейного поляризационного разделителя относительно плоскости измерений. Кривые 1-6 соответствуют значениям θ=45°, 50°, 55°, 60°, 65°, 70° и рассчитаны для отношения  . При изменении истинной разности фаз Δφ в диапазоне (0÷-180°), кривые 1-6 отображаются зеркально и на фиг.1 не показаны, поскольку на оценку точности измерений это не повлияет. Угол θ отсчитывается от горизонтальной плоскости против движения часовой стрелки.
. При изменении истинной разности фаз Δφ в диапазоне (0÷-180°), кривые 1-6 отображаются зеркально и на фиг.1 не показаны, поскольку на оценку точности измерений это не повлияет. Угол θ отсчитывается от горизонтальной плоскости против движения часовой стрелки.
Из анализа фиг.1 следует, что только при ориентации линейного поляризационного разделителя строго под углом θ=45° к плоскости измерений αизм=αист и, соответственно, ошибка измерения пеленга δα=0° при любом угловом положении подвижного объекта (зависимость 1).
В случаях, когда в θ≠45° возникают ошибки в измерении пеленга подвижного объекта и δα≠0°. При этом величина ошибки δα зависит, в общем случае, как от разности фаз Δφ, т.е. от истинного углового положения подвижного объекта αист, так и от угла ориентации θ линейного поляризационного разделителя относительно плоскости измерений и достигает своего наибольшего, по абсолютной величине, значения |δα|=max при Δφ=0° и Δφ=±180°, а своего наименьшего значения δα=0° достигает при Δφ=±90° (кривые 2-6). Причем, когда Δφ=0° или ±180°, что соответствует, с учетом (1), угловому положению подвижного объекта αист соответственно 0° или ±19.47°, наибóльшее, по абсолютной величине, значение ошибки |δα|=max определяется только фактической ориентацией θ линейного поляризационного разделителя относительно его истинной ориентации равной θ0=45°, когда ошибка δα=0°. Причем наибольшее значение ошибки |δα|=max растет с ростом, по абсолютной величине, угла рассогласования |Δθ| между фактической ориентацией θ линейного поляризационного разделителя и его истинной (требуемой) ориентацией равной θ0=45°, т.е. с ростом

В то же время, когда Δφ=±90°, т.е. истинное угловое положение объекта соответствует величине αист=±9.59°, ошибка измерения пеленга δα=0° и не зависит от угла ориентации линейного поляризационного разделителя. Последнее обстоятельство обусловлено тем, что суммарная электромагнитная волна, вектор Джонса которой имеет вид (5), с учетом ε=0° и Δφ=±90°, в точке приема на входе всеполяризованной приемной антенны поляризована по кругу. Поэтому отношение амплитуд A1/A2 выходных сигналов
и
линейного поляризационного разделителя всегда равно единице, т.е. A1/A2=1 и не зависит от его угла ориентации θ относительно плоскости измерений. В этой связи, с учетом (24), всегда выполняется равенство αизм=αист, что обуславливает нулевую ошибку δα=0° измерения пеленга подвижного объекта.
Что касается других угловых положений подвижного объекта, когда Δφ=0° или Δφ=±180°, то в первом и во втором случаях суммарная электромагнитная волна в точке приема на входе всеполяризованной приемной антенны, с учетом (5), при условии ε=0°, поляризованы линейно. Причем в первом случае, когда Δφ=0°, плоскость поляризации суммарной электромагнитной волны ориентирована под углом 45° к горизонтальной плоскости измерений, а во втором - под углом 135°. Поэтому отношение амплитуд A1/A2 сигналов
и
с выходов плеч линейного поляризационного разделителя, в обоих случаях, при одном и том же угловом положении подвижного объекта на прямую зависит от угла ориентации линейного поляризационного разделителя, что непосредственно приводит к ошибкам измерения пеленга подвижного объекта (кривые 2-6).
На фиг.2 представлена структурная электрическая схема радионавигационной системы для измерения пеленга подвижного объекта.
Радионавигационная система содержит передатчик 1, передающие антенны 2 и 3, расположенные в точках с известными координатами и разнесенные, например, в горизонтальной плоскости на расстоянии d друг от друга, на борту подвижного объекта радионавигационная система содержит приемную всеполяризованную антенну 4, линейный поляризационный разделитель 5, фазовый угловой дискриминатор 6, вычислитель 7.
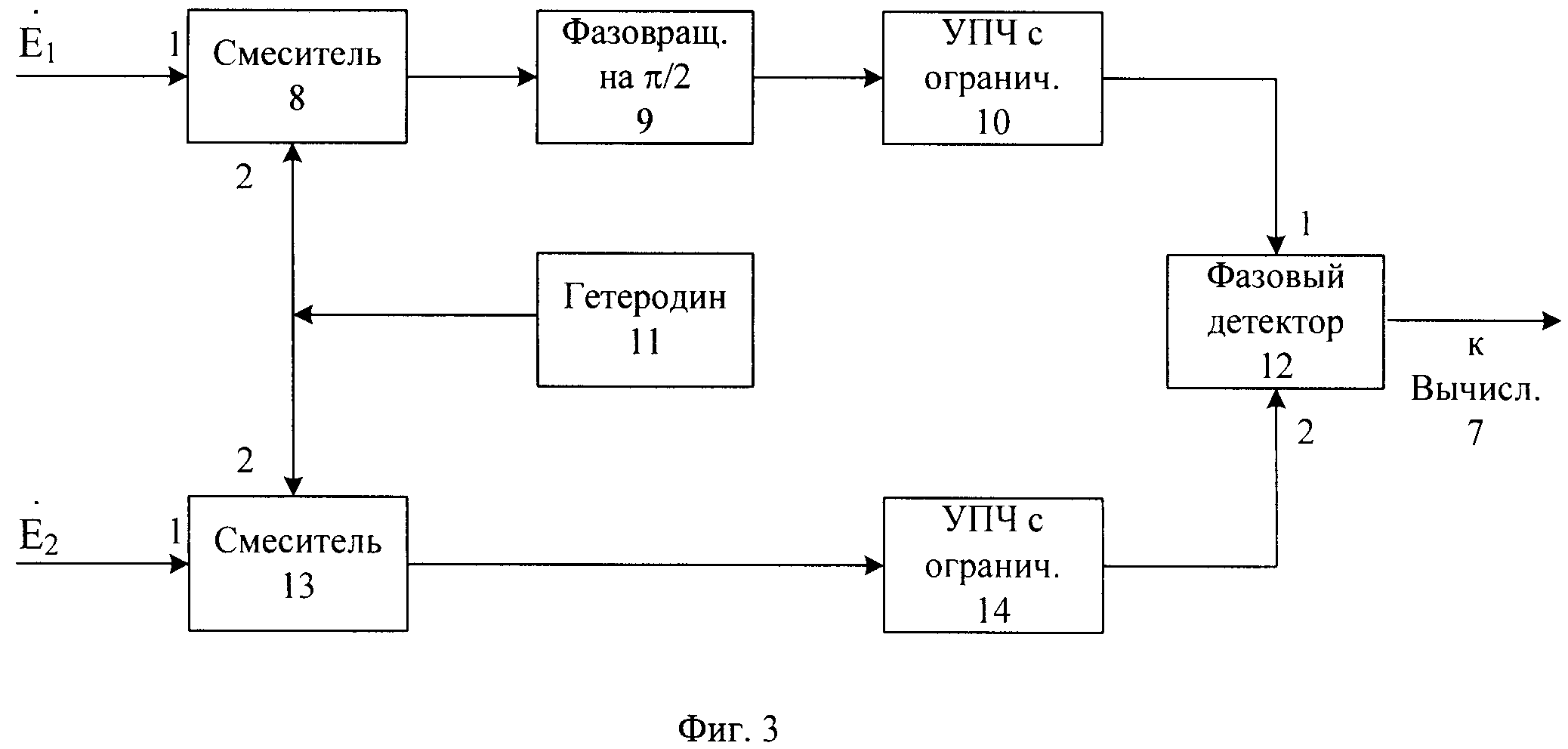
На фиг.3 представлена структурная электрическая схема фазового углового дискриминатора 6, включающего в себя первый смеситель частоты 8, фазовращатель на 90° 9, первый усилитель промежуточной частоты (УПЧ) с ограничением по амплитуде 10, гетеродин 11, фазовый детектор 12, второй смеситель частоты 13, второй УПЧ с ограничением по амплитуде 14.
Радионавигационная система работает следующим образом.
Передатчик 1, через подключенные к нему двумя передающими антеннами 2 и 3 с ортогональными собственными линейными поляризациями излучает в направлении подвижного объекта, ортогонально линейно поляризованные электромагнитные волны соответственно с горизонтальной и вертикальной ориентацией плоскости поляризации с равными амплитудами, фазами и длинами волн.
На подвижном объекте суммарная электромагнитная волна, вектор Джонса которой в направлении α в декартовом поляризационном базисе, с учетом (5), при условии ε=0°, имеет вид:

полностью принимается всеполяризованной приемной антенной 4. С выхода приемной антенны 4 сигнал поступает на вход линейного поляризационного разделителя 5, орты собственной системы координат которого совпадают с осями плеч прямоугольных волноводов и совпадают также с вертикальной и горизонтальной собственными поляризациями передающих антенн, соответственно, и ориенированы под углом θ=0° к плоскости измерений. Линейный поляризационный разделитель 5 разделяет поступающую на его вход суммарную электромагнитную волну (31) на две линейные ортогональные по поляризации электромагнитные волны, поляризации которых совпадают с вертикальной и горизонтальной поляризациями излучаемых электромагнитных волн, соответственно. С выходов плеч линейного поляризационного разделителя 5, ортогонально линейно поляризованные сигналы
и
, описываемые, с учетом временной зависимости аналитическими выражениями вида


где ω - круговая частота,
t - время,
поступают на входы фазового углового дискриминатора 6. При этом амплитуды A1 и A2, а также разность фаз Δψ=ψ2-ψ1 сигналов
и
, с учетом подстановки θ=0° и ε=0° в выражения (8), (9) и в (6), (7), на входе фазового углового дискриминатора 6 имеют вид

и
где n=0, 1, 2, …,
или после преобразований, с учетом n=0

Из анализа (34) и (35) следует, что амплитуды A1 и A2 выходных сигналов
и
, линейного поляризационного разделителя 5, ориентированного под углом θ=0° к плоскости измерений, постоянны и равны между собой (34) и не зависят от углового положения подвижного объекта. В то же время разность фаз Δψ сигналов
и
на входе фазового углового дискриминатора 6, наоборот, определяется только угловым положением подвижного объекта и совпадает с измеряемой разностью фаз Δφ между принимаемыми ортогонально линейно поляризованными электромагнитными волнами на входе всеполяризованной приемной антенны 4 и связаны между собой соотношением (35).
Затем, выходные сигналы
и
линейного поляризационного разделителя 5 с параметрами (34) (35) поступают на входы фазового углового дискриминатора 6 (фиг.3), т.е. поступают на первые входы смесителей частоты 8 и 13 соответственно, а на их вторые входы поступает сигнал с выхода гетеродина 11. После чего, сигнал с выхода первого смесителя частоты 8 через фазовращатель на 90° 9 поступает на вход первого УПЧ с ограничением по амплитуде 10, а сигнал с выхода второго смесителя частоты 13 поступает на вход второго УПЧ с ограничением по амплитуде 14. В УПЧ 10 и 14, имеющих идентичные амплитудно- и фазочастотные характеристики, осуществляется усиление сигналов промежуточной частоты, а также производится их нормировка за счет амплитудного ограничения усиливаемых сигналов промежуточной частоты с порогом ограничения U0. Затем выходной сигнал УПЧ 10 поступает на первый вход фазового детектора 12, а выходной сигнал УПЧ 14 поступает на второй вход фазового детектора 12. На выходе фазового детектора 12 формируется сигнал пропорциональный синусу разности фаз Δψ входных сигналов и имеет вид пеленгационной характеристики

или с учетом (35)

Подставляя из (5) значение Δφ в (37), окончательно получим:

где U0=const.
При малых значения α, полагая U0=1, (38) имеет приближенно линейный характер:

Таким образом, по сигналу на выходе фазового детектора 12 можно определить величину и знак угла отклонения α подвижного объекта от перпендикуляра, восстановленного к середине базы d, образованной передающими антеннами.
Найдя производную нормированного выходного сигнала фазового детектора S(α)/U0 в точке α=0, получим выражение для крутизны пеленгационной характеристики вида:

Таким образом, крутизна пеленгационной характеристики, а, следовательно, и точность пеленгования растут с увеличением отношения d/λ.
С выхода фазового детектора 12 сигнал поступает на вычислитель 7, где по измеренной разности фаз Δψ выходных сигналов
и
линейного поляризационного разделителя, с учетом (1) и (35), производится операция расчета пеленга а подвижного объекта по формуле:

где n=0, 1, 2, ….
Соотношение (41) справедливо в том случае, если линейный поляризационный разделитель ориентирован под углом θ=0° к плоскости измерений. Однако, как было изложено выше, сохранить требуемую ориентацию линейного поляризационного разделителя относительно плоскости измерений на подвижном объекте крайне затруднительно и, в общем случае, θ≠0°, что приведет, также как и в устройстве прототипе, к ошибкам измерения пеленга α подвижного объекта. Поэтому необходимо для заявляемой радионавигационной системы исследовать зависимость ошибки измерения пеленга α от угла ориентации θ линейного поляризационного разделителя относительно плоскости измерений и провести сравнительный анализ точности измерений пеленга α с устройством прототипом.
С этой целью установим связь фаз ψ1 и ψ2 сигналов
и
с выходов плеч линейного поляризационного разделителя, ориентированного в общем случае под углом θ относительно плоскости измерений, с измеряемым параметром разностью фаз Δφ между ортогонально поляризованными электромагнитными волнами, принимаемыми на подвижном объекте всеполяризованной приемной антенной. Анализ проведем, как и для устройства прототипа, для случая, когда передающие антенны излучают ортогонально линейно поляризованные электромагнитные волны, угол эллиптичности которых ε=0°.
Тогда подставляя значение ε=0° в (6) и (7), получим аналитические выражения для сигналов
и
на выходе линейного поляризационного разделителя ориентированного под углом θ относительно плоскости измерений вида:


В этом случае амплитуды A1 и A2 сигналов
и
определяются с помощью выражений (19) и (20), а их фазы ψ1 и ψ2, с учетом (42) и (43), определяются с помощью соотношений вида:

и

соответственно разность фаз Δψ, с учетом известных [13] преобразований, имеет вид:

где n=0, 1, 2, ….
Соотношение (46) устанавливает связь разности фаз Δψ между сигналами
и
на выходе линейного поляризационного разделителя, ориентированного под углом θ относительно плоскости измерений, с истинной разностью фаз Δφ между принимаемыми ортогонально линейно поляризованными сигналами на его входе. Из анализа (46) следует, что когда линейный поляризационный разделитель ориентирован под углом θ=0° к плоскости измерений, то измеряемая разность фаз Δψ выходных сигналов
и
линейного поляризационного разделителя совпадает с истинной разностью фаз Δφ, т.е. Δψ=Δφ и, соответственно, выражение (46) преобразуется к виду (35). В общем случае, когда θ≠0°, то разность фаз Δψ сигналов
и
с выходов плеч линейного поляризационного разделителя зависит не только от искомого измеряемого параметра Δφ, но и от угла ориентации θ линейного поляризационного разделителя. Последнее приводит к искажению пеленгационной характеристики (36) и обуславливает наличие ошибок в измерении пеленга α подвижного объекта.
Для расчета зависимости ошибки измерения пеленга δα подвижного объекта от угла ориентации θ линейного поляризационного разделителя используем соотношение (22). При этом истинная угловая координата подвижного объекта определяется также как и в прототипе в соответствии с выражением (1) или (41), а измеренная угловая координата αизм, по аналогии с (1), определяется, с учетом подстановки (46) в (41), по формуле:

Выражение (47) устанавливает связь между измеренным значением угловой координаты αизм подвижного объекта и измеренной разностью фаз Δψизм между сигналами
и
на выходе линейного поляризационного разделителя, ориентированного под углом θ относительно плоскости измерений. Из анализа (47) видно, что установленная связь между αизм и Δψизм неоднозначна. Однозначное измерение угловой координаты αизм можно осуществить лишь в некотором угловом секторе шириной ±α0, в пределах которого изменение разности фаз Δφ не превышает интервала однозначности характеристики фазового детектора (36). Как следует из (36), однозначное измерение разности фаз Δψ возможно в пределах  , то из (41) получим, что
, то из (41) получим, что

Подставляя (1) и (47) в (22) и полагая n=0, получим выражение для расчета ошибки измерения пеленга δα подвижного объекта в виде:

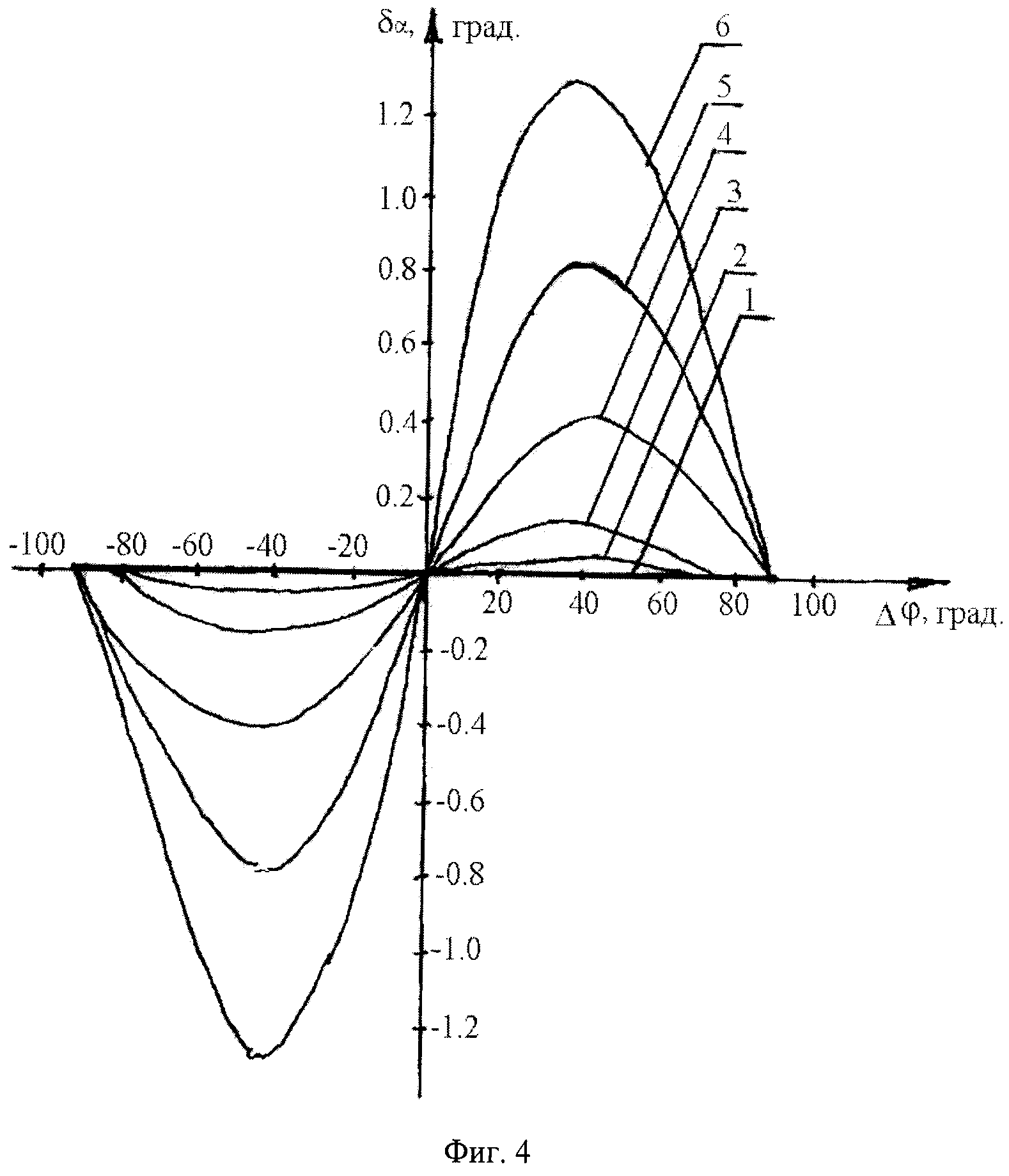
На фиг.4 представлена расчетная, в соответствии с (49), зависимость ошибки измерения пеленга δα от истинной разности фаз Δφ между принимаемыми ортогонально линейно поляризованными электромагнитными волнами на входе приемной всеполяризованной антенны (или на входе линейного поляризационного разделителя), для различных значений угла ориентации θ линейного поляризационного разделителя относительно плоскости измерения. Кривые 1-6 соответствуют значениям θ=0°, 5°, 10°, 15°, 20°, 25° и рассчитаны при отношении  . Угол θ отсчитывается от горизонтальной плоскости против часовой стрелки.
. Угол θ отсчитывается от горизонтальной плоскости против часовой стрелки.
Из анализа фиг.4 следует, что только при ориентации линейного поляризационного под углом θ=0° к плоскости измерений, αизм=αист и, соответственно ошибка измерения пеленга δα=0° при любом угловом положении подвижного объекта (зависимость 1). В случаях, когда θ≠0° возникают ошибки в измерении пеленга α и δα≠0°. При этом величина ошибки δα зависит, в общем случае, как от разности фаз Δφ, т.е. от углового положения подвижного объекта, так и от ориентации θ линейного поляризационного разделителя (кривые 2-6). Причем наибольшего, по абсолютной величине, значения |δα|=max ошибка достигает при Δφ=±45°, а своего наименьшего значения δα=0° достигает при Δφ=0° и Δφ=±90°. Когда Δφ=±45°, что соответствует, с учетом (1), угловому положению подвижного объекта соответственно ±4.78°, наибольшее, по абсолютной величине значение ошибки |δα|=max, при указанных угловых положениях подвижного объекта, определяется только ориентацией линейного поляризационного разделителя. Причем, как следует из анализа кривых (2-6), наибольшее значение ошибки |δα| растет с ростом, по абсолютной величине, угла рассогласования |Δθ| между фактической ориентацией θ линейного поляризационного разделителя и его требуемой ориентацией, равной θ0=0°, т.е. с ростом:

В то же время, как следует из анализа кривых 2-6 фиг.4, когда Δφ=0° и Δφ=±90°, ошибка измерения пеленга δα=0° и не зависит от ориентации линейного поляризационного разделителя. Причем, в случаях, когда Δφ=±90°, что соответствует истинному угловому положению подвижного объекта αист=±9.59°, нулевая ошибка измерения пеленга δα=0° обусловлена тем, что суммарная электромагнитная волна на этих направлениях, с учетом (5) при ε=0°, в точке приема на входе всеполяризованной приемной антенны поляризована по кругу с правым, либо с левым направлением вращения вектора электрического поля. Поэтому, отношение амплитуд A1/A2 сигналов
и
, и их разность фаз Δψ с выходов плеч линейного поляризационного разделителя не зависят от его ориентации и определяются только угловым положением подвижного объекта.
Особый интерес представляет случай, когда Δφ=0°, т.е. подвижный объект находится на равносигнальном направлении, совпадающем с перпендикуляром к середине базы d, образованной передающими антеннами. Тогда, как следует из анализа кривых 2-6 фиг.4, αизм=αист и ошибка измерения пеленга δα, обусловленная не точностью ориентации линейного поляризационного разделителя относительно плоскости измерений, всегда равна δα=0° и не зависит от его ориентации. Последнее обусловлено тем, что суммарная электромагнитная волна, с учетом (5) при ε=0°, на равносигнальном направлении на входе всеполяризованной приемной антенны подвижного объекта (или на входе линейного поляризационного разделителя) поляризована линейно. При этом ориентация плоскости поляризации суммарной электромагнитной волны составляет угол 45° к горизонтальной плоскости измерений. Поэтому изменение ориентации линейного поляризационного разделителя на подвижном объекте влияет только на амплитудное отношение A1/A2 выходных сигналов
и
линейного поляризационного разделителя и не влияет на их разность фаз Δψ, в которой содержится угловая информация о подвижном объекте.
Проведем сравнительный анализ точности измерений пеленга α подвижного объекта между устройством прототипом и заявляемой радионавигационной системой, для чего сопоставим результаты расчетов, представленные на фиг.1 и фиг.4.
Из сравнительного анализа следует, что если в устройстве прототипе линейный поляризационный разделитель ориентирован под углом θ=45° к плоскости измерений, а в заявляемой радионавигационной системе ориентирован под углом θ=0°, то ошибки измерения пеленга δα=0° и не зависят от углового положения подвижного объекта (кривые 1 на фиг.1 и фиг.4).
В случаях, когда в устройстве прототипе θ≠45°, а в заявляемой радионавигационной системе соответственно θ≠0°, то в том и другом случаях возникают ошибки в измерении пеленга α. При этом величина ошибки δα зависит, в общем случае, как от разности фаз Δφ, т.е. от истинного углового положения подвижного объекта, так и от угла ориентации θ линейного поляризационного разделителя относительно плоскости измерений (кривые 2-6 фиг.1 и фиг.4). Рассмотрим характерные направления, где ошибки измерения пеленга δα достигают своих экстремальных значений и сравним их между собой.
Рассмотрим случай, когда подвижный объект находится на равносигнальном направлении, совпадающем с нормалью к середине базы d, образованной передающими антеннами. Тогда разность фаз Δφ между излучаемыми ортогонально линейно поляризованными электромагнитными волнами на входе приемной всеполяризованной антенны подвижного объекта равна нулю, т.е. Δφ=0°.
Если обратиться к устройству прототипу, то из анализа кривых 2-6 фиг.1, видим, что на равносигнальном направлении, когда Δφ=0°, а также направлении, соответствующем разности фаз Δφ=±180°, ошибки измерения пеленга δα, обусловленные неточностью ориентации линейного поляризационного разделителя относительно плоскости измерений, достигают своих максимальных значений и напрямую связаны с ориентацией линейного поляризационного разделителя. Так, например, при угле рассогласования Δθ=5°, ошибка составляет величину δα=1°, а при Δθ=10°, ошибка составляет уже величину δα=2° и далее с ростом угла рассогласования Δθ ошибка δα также растет.
В то же время, для заявляемой радионавигационной системы, как следует из анализа кривых 2-6 фиг.4, на равносигнальном направлении ошибка измерения пеленга δα, обусловленная неточностью ориентации линейного поляризационного разделителя относительно плоскости измерений, всегда равна δα=0° и не зависит от его ориентации, чем и обеспечивается более высокая точность измерений пеленга α.
Кроме того, у заявляемой радионавигационной системы, на направлениях, близких к равносигнальному направлению, т.е. при малых углах отклонения α, как следует из сравнения соотношений (18) и (40), крутизна пеленгационной характеристики µ в два раза больше, чем у устройства прототипа, что, как известно [14], при одном и том же отношении сигнал/шум на входе приемных каналов, снижает ошибку пеленгования δα соответственно в два раза, и тем самым обеспечивает более высокую точность измерений пеленга α.
Рассмотрим случаи, когда отклонения подвижного объекта увеличиваются от равносигнального направления.
Из анализа кривых 2-6 фиг.1 следует, что с увеличением отклонения ошибка измерения пеленга δα для устройства прототипа уменьшается и равна нулю δα=0° при угловом положении объекта, когда Δφ=±90°. В то же время, для заявляемой радионавигационной системы, как следует из анализа кривых 2-6 фиг.4, ошибка измерения δα, наоборот увеличивается и достигает своего максимального значения по абсолютной величине |δα|=max при угловых положениях подвижного объекта, когда Δφ=±45°, а затем уменьшается и равна нулю δα=0°, также как и в прототипе при Δφ=±90°. Однако, из сравнительного анализа кривых 2-6 фиг.1 и фиг.4 следует, что даже в наихудшем, для заявляемой радионавигационной системы случае, когда Δφ=±45°, ошибка измерения пеленга δα, обусловленная не точностью ориентации линейного поляризационного разделителя, меньше или сравнима с устройством прототипом при одном и том же угловом положении подвижного объекта. Так, например, при одинаковом угле рассогласования Δθ=10°, для заявляемой навигационной системы ошибка пеленгования составляет величину δα≈0.16°, а для устройства прототипа величину δα≈0.36°, а при Δθ=15°, ошибка пеленгования составляет соответственно величины 0.4° и 0.6°.
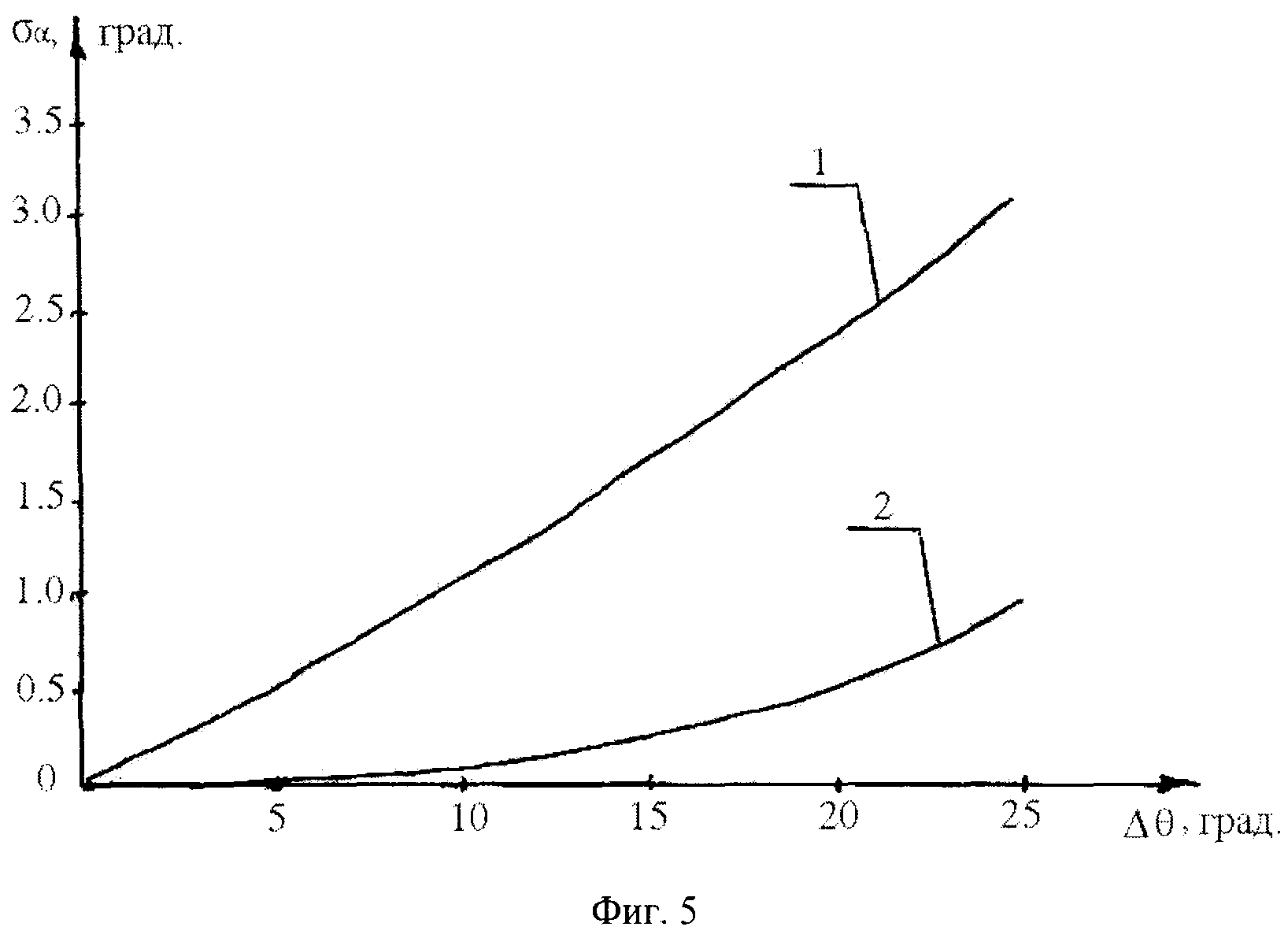
На фиг.5, для сравнения, представлена расчетная зависимость среднеквадратичной ошибки пеленгования σα от угла рассогласования Δθ между фактической ориентацией линейного поляризационного разделителя и его истинной (требуемой) ориентацией относительно плоскости измерений. Где 1 - расчетная зависимость для устройства прототипа, 2 - та же зависимость для заявляемой радионавигационной системы.
Среднеквадратичная ошибка σα определялась как корень квадратный из средней величины квадратов отдельных ошибок между измеренным значением αизм и истинным значением αист [12] в рабочем диапазоне изменения Δφ=(-180°÷180°) для устройства прототипа и в диапазоне (-90°÷90°) для заявляемой радионавигационной системы.
Из сравнительного анализа следует, что даже уже при небольших углах отклонения ориентации линейного поляризационного разделителя от требуемой ориентации, например, при Δθ=5°, среднеквадратичная ошибка пеленга σα для устройства прототипа составляет величину  , в то время как для заявляемой навигационной системы она практически близка к нулю и составляет величину
, в то время как для заявляемой навигационной системы она практически близка к нулю и составляет величину  , а при угле рассогласования Δθ=10° среднеквадратичная ошибка составляет соответственно величины
, а при угле рассогласования Δθ=10° среднеквадратичная ошибка составляет соответственно величины  и
и  , что, безусловно, свидетельствует о более высокой точности измерения пеленга α заявляемой радионавигационной системой при одном и том же угле рассогласования Δθ.
, что, безусловно, свидетельствует о более высокой точности измерения пеленга α заявляемой радионавигационной системой при одном и том же угле рассогласования Δθ.
В 3-см диапазоне волн заявляемая радионавигационная система может быть реализована следующим образом.
В качестве передатчика 1 может использоваться, например, генератор высокочастотных колебаний типа ГЧ-83, к выходу которого подключен делитель мощности, выполненный в виде двойного волноводного Т-образного разветвителя [15]. Причем первый выход разветвителя подключен к передающей антенны 2, а его второй выход подключен через отрезок скрученного на 90° прямоугольного волновода к передающей антенне 3.
В качестве передающих антенн 2 и 3 может быть использована рупорная антенна [16].
Приемная всеполяризованная антенна 4 может быть выполнена в виде круглого рупора [15].
Линейный поляризационный разделитель 5 может быть выполнен в виде волновода круглого сечения с переходом на два ортогонально расположенных волноводов прямоугольного сечения [8].
Фазовый угловой дискриминатор 6 может быть выполнен по известной [17] схеме фазо-фазовой моноимпульсной системы.
Вычислитель 7 может быть выполнен на базе бортового компьютера подвижного объекта.
Заявляемая радионавигационная система позволяет повысить точность измерений пеленга подвижного объекта за счет того, что, во-первых, на равносигнальном направлении и на направлениях близких к равносигнальному полностью устраняются ошибки измерений пеленга, обусловленные креном подвижного объекта, во-вторых, на указанных направлениях заявляемая радионавигационная система имеет бóльшую (в два раза) крутизну пеленгационной характеристики и, наконец, в - третьих, точность пеленгования у заявляемой системы менее чувствительна к изменениям крена подвижного объекта, практически, при любом его угловом положении. В совокупности, эти преимущества позволяют повысить эффективность практического применения радионавигационных средств на подвижных объектах.
Источники информации, использованные при составлении описания изобретения:
1. Белавин О.В. Основы радионавигации. - М: «Советское радио», 1977. - 377 с.
2. Папагриев В.Е., Сосновский А.А., Хаймович И.А. Параметры радионавигационных средств обеспечения полетов и их измерение. - М.: «Транспорт», 1973.
3. Ширман Я.Д. Теоретические основы радиолокации. - М.: «Советское радио», 1970. - 559 с.
4. Ярлыков М.С. Статистическая теория радионавигации. - М.: «Радио и связь», 1985. - 343 с.
5. Астафьев Т.П., Шебшаевич B.C., Юрков Ю.А. Радиотехнические средства навигации летательных аппаратов. - М.: «Советское радио», 1962. - 963 с.
6. Бадулин Н.Н., Гулько В.Л. Навигационная система для определения пеленга. - А.С. №1355955, М. кл.4, G01S 3/02, приоритет от 9.12.1985.
7. Бадулин Н.Н., Гулько В.Л. Способ измерения пеленга подвижного объекта и устройство для его осуществления. - Патент СССР №1251003, М. кл.4, G01S 3/02, приоритет от 29.01.1985.
8. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация радиолокационных сигналов. - М: «Советское радио», 1966. - 440 с.
9. А.С. Александров, Г.Р. Арно и др. Современное состояние и тенденции развития зарубежных средств и систем навигации подвижных объектов военного и гражданского назначения. - Санкт-Петербург, 1994. - 119 с.
10. Д.С. Пельпор, В.В. Ягодкин. Гироскопические системы. - М: «Высшая школа», 1977. - 216 с.
11. Агаджапов П.А., Воробьев В.Г. и др. Автоматизация самолетовождения и управления воздушным движением. - М.: «Транспорт», 1980. - 357 с.
12. Бартон Д., Вард Г. Справочник по радиолокационным измерениям. - М.: «Советское радио», 1976. - 371 с.
13. Выгодский М.Я. Справочник по высшей математике. - М.: «Век», 1997. - 863 с.
14. Гришин Ю.П., Ипатов В.П., Казаринов Ю.М. Радиотехнические системы. - М.: «Высшая школа», 1990. - 496 с.
15. Жук М.С, Молочков Ю.Б. Проектирование линзовых сканирующих широкодиапазонных антенн и фидерных устройств. - М.: «Энергия», 1973. - 401 с.
16. Драбкин А.Л. и др. Антенно-фидерные устройства. - М.: «Советское радио», 1974.
17. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: «Радио и связь», 1984. - 309 с.
Радионавигационная система для измерения пеленга подвижного объекта, содержащая передатчик, выход которого соединен с входами двух разнесенных передающих антенн с ортогональными собственными поляризациями, расположенных в точках с известными координатами в плоскости измерений на расстоянии d друг от друга, и расположенные на подвижном объекте приемную всеполяризованную антенну, выход которой соединен с входом линейного поляризационного разделителя, и вычислитель, отличающаяся тем, что введен фазовый угловой дискриминатор, два входа которого соединены с двумя выходами линейного поляризационного разделителя, а его выход соединен с входом вычислителя, причем передающие антенны имеют горизонтальную и вертикальную линейные собственные поляризации и совпадают с плоскостью измерений и перпендикуляром к этой плоскости соответственно, а орты собственной системы координат линейного поляризационного разделителя совпадают с осями плеч ортогонально расположенных прямоугольных волноводов и ориентированы так, что плоскости поляризации волн, на которые он разделяет принятую суммарную электромагнитную волну, совпадают соответственно с горизонтальной и вертикальной линейными собственными поляризациями передающих антенн и составляют угол 0° с плоскостью измерений.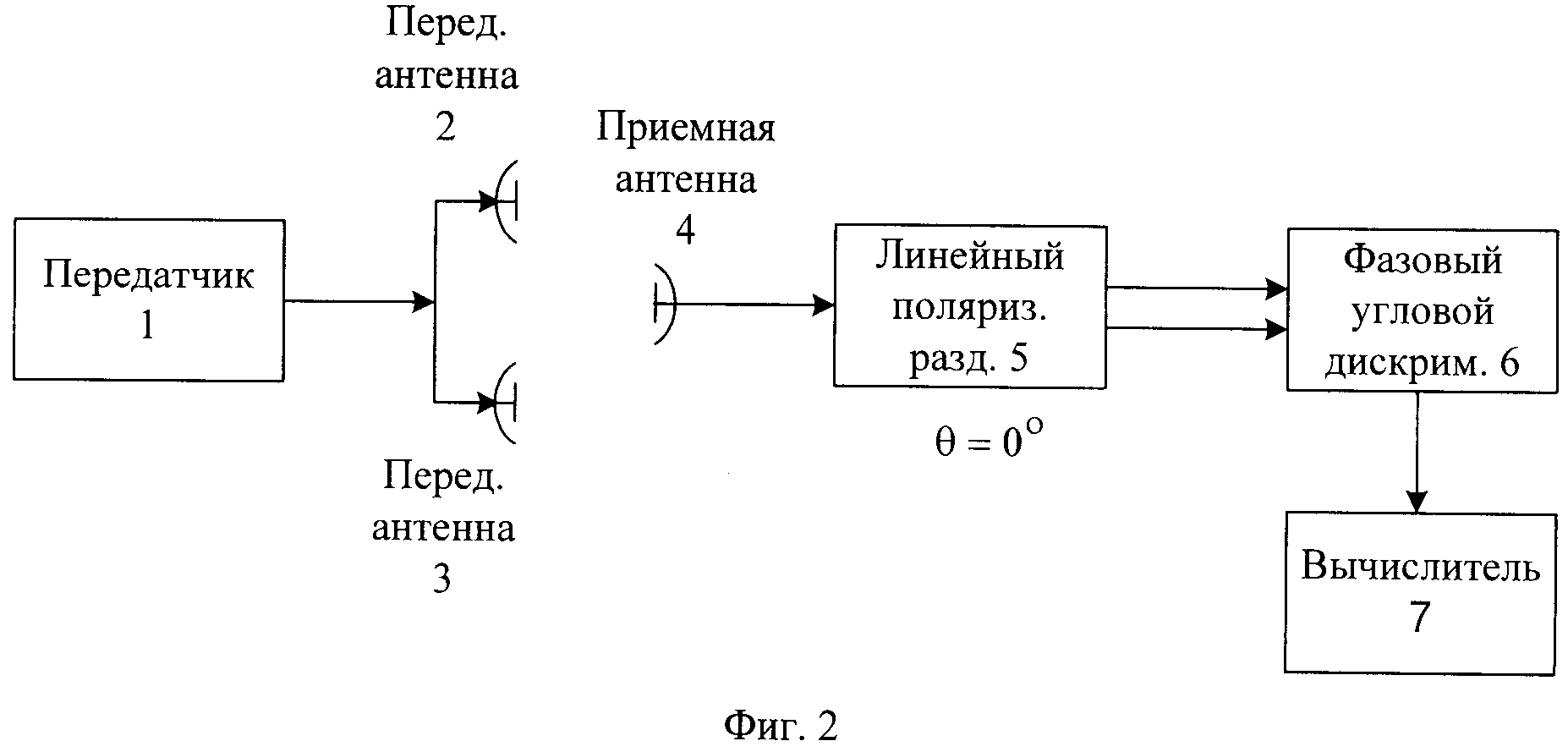
Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ измерения угла крена летательного аппарата и устройство для его реализации
Радиометр для измерения глубинных температур объекта (радиотермометр)
Способ измерения угла крена подвижного объекта и устройство для его реализации
Устройство управления амплитудой мощных периодических сигналов
Радионавигационная система для измерения пеленга подвижного объекта
Способ измерения угла крена летательного аппарата и устройство для его реализации
Источник питания для электротехнологических установок
Способ измерения угла тангажа летательного аппарата и устройство для его реализации
Поляризационно-фазовый способ измерения угла крена подвижного объекта и радионавигационная система для его реализации
Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ измерения угла крена летательного аппарата и устройство для его реализации
Радиометр для измерения глубинных температур объекта (радиотермометр)
Способ измерения угла крена подвижного объекта и устройство для его реализации
Устройство управления амплитудой мощных периодических сигналов
Радионавигационная система для измерения пеленга подвижного объекта
Способ измерения угла крена летательного аппарата и устройство для его реализации
Источник питания для электротехнологических установок
Способ измерения угла тангажа летательного аппарата и устройство для его реализации
Поляризационно-фазовый способ измерения угла крена подвижного объекта и радионавигационная система для его реализации

