Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области ракетной техники, а именно к способам измерения ориентации и угловой скорости космических аппаратов.
Известен способ измерения угловой скорости космического аппарата и устройство для его реализации, заключающийся в формировании гироскопического сигнала и астросигнала и использовании их для формирования управления, а также устройство его реализующее, содержащее сумматоры, гироскопы и телекамеру (астродатчик) [1].
К недостаткам известных способа и устройства относится низкая надежность измерения и значительная ошибка измерения угловой скорости.
Известен способ измерения вектора угловой скорости космического аппарата, заключающийся в том, что формируют сигнал гироизмерений вектора угловой скорости и используют его для формирования сигнала управления, и устройство для его реализации, содержащее последовательно соединенные космический аппарат, гироскопический измеритель вектора угловой скорости, формирователь сигнала гирокватерниона и первый сумматор, астродатчик, выход которого подключен через формирователь сигнала астрокватерниона ко второму входу первого сумматора и первому входу второго сумматора, модель космического аппарата, выход которого через формирователь кватерниона сигнала идентификации соединен со вторым входом второго сумматора [2] (прототип).
Низкая точность и надежность измерения вектора угловой скорости являются их недостатками.
С целью исключения указанных недостатков предложенное техническое решение задачи, в котором способ отличается тем, что после отказа первого гироскопа формируют сигнал среднего значения астроизмерений вектора угловой скорости, при отказе двух или более гироскопов формируют сигнал идентификации вектора угловой скорости, а для формирования управления используют сигнал среднего значения астроизмерений вектора угловой скорости,
при отказе астродатчика для формирования сигнала управления используют сигнал идентификации вектора угловой скорости,
а реализующее его устройство отличается тем, что оно содержит два нелинейных блока, два формирователя сигнала переключения, четыре нормально-разомкнутых переключателя, два нормально-замкнутых переключателя и третий сумматор, первый вход первого сумматора через первый нормально-замкнутый переключатель соединен с первым входом третьего сумматора, выход первого сумматора через последовательно соединенные первый нелинейный блок, первый формирователь сигнала переключения, первый нормально-разомкнутый переключатель и второй нормально-замкнутый переключатель соединен со вторым входом третьего сумматора, выход первого формирователя сигнала переключения соединен со вторым входом первого нормально-замкнутого переключателя, второй вход первого сумматора соединен со вторым входом первого нормально-разомкнутого переключателя, второй выход космического летательного аппарата через второй нормально-разомкнутый переключатель соединен со входом астродатчика, а вход - через третий нормально-разомкнутый переключатель соединен со входом модели космического аппарата, выход второго сумматора через последовательно соединенные второй нелинейный блок и второй формирователь сигнала переключения соединен со вторым входом второго нормально-замкнутого переключателя, а выход формирователя сигнала кватерниона соединен через третий нормально-разомкнутый переключатель с третьим входом третьего сумматора.
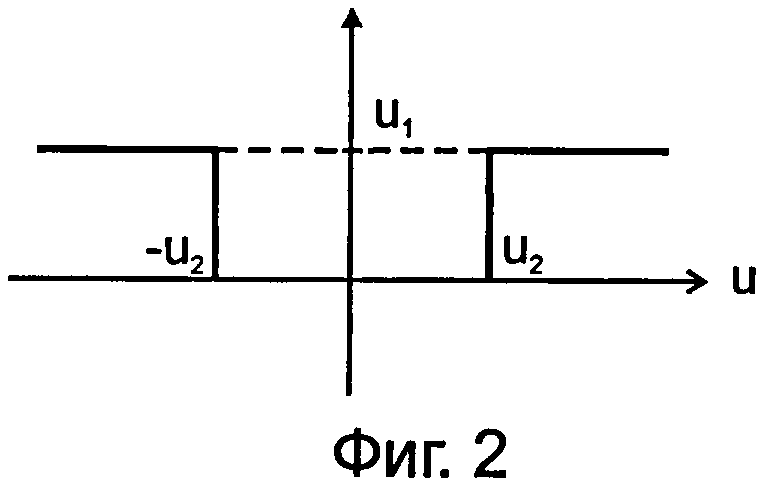
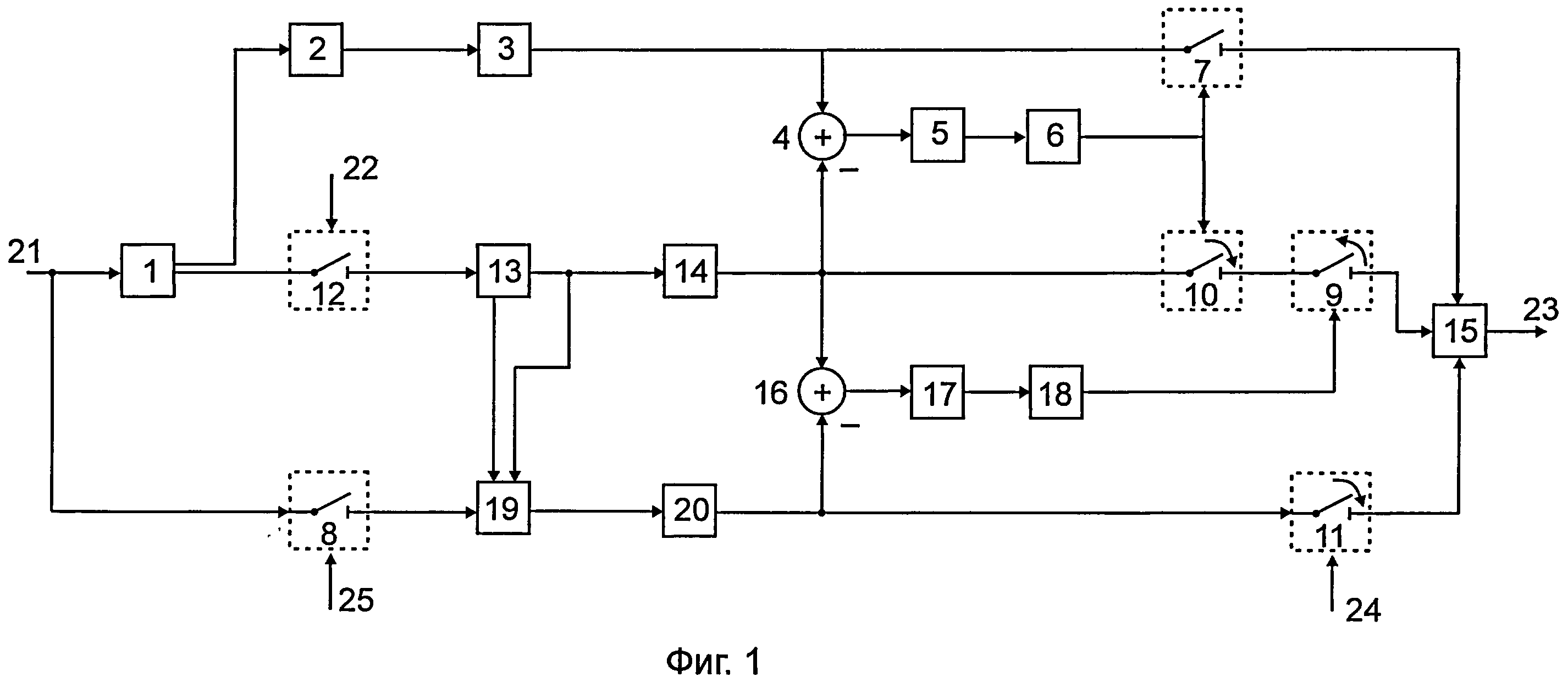
Изобретение поясняется фиг.1, на которой изображено устройство для реализации способа измерения вектора угловой скорости космического аппарата, фиг.2, на которой представлена характеристика нелинейных блоков, и фиг.3 с изображением математической модели космического аппарата. При этом под космическим аппаратом понимается соединение исполнительного элемента и собственно космического аппарата.
На фигурах приняты следующие обозначения:
1 - космический аппарат (КА);
2 - гироскопический измеритель вектора угловой скорости (ГИВУС);
3 - формирователь сигнала гирокватерниона;
4 - первый сумматор;
5 - первый нелинейный блок;
6 - первый формирователь сигнала переключения;
7 - первый нормально-замкнутый переключатель;
8 - третий нормально-разомкнутый переключатель;
9 - второй нормально-замкнутый переключатель;
10 - первый нормально-разомкнутый переключатель;
11 - четвертый нормально-разомкнутый переключатель;
12 - второй нормально-разомкнутый переключатель;
13 - астродатчик;
14 - формирователь сигнала астрокватерниона;
15 - третий сумматор;
16 - второй сумматор;
17 - второй нелинейный блок;
18 - второй формирователь сигнала переключения;
19 - (математическая) модель космического аппарата;
20 - формирователь кватерниона сигнала идентификации;
21 - сигнал управления;
22 - первый сигнал переключения;
23 - сигнал кватерниона вектора угловой скорости для формирования сигнала управления 21;
24 - второй сигнал переключения;
25 - третий сигнал переключения;
26 - исполнительное устройство (в частном случае комплекс управляемых двигателей-маховиков);
27 - третий сумматор;
28 - первый интегратор;
29 - четвертый сумматор;
30 - второй интегратор;
31 - третий нормально-замкнутый переключатель;
32 - первый усилитель;
33 - пятый сумматор;
34 - четвертый нормально-замкнутый переключатель;
35 - второй усилитель;
36 - шестой сумматор;
37 - четвертый сигнал переключения;
38 - пятый сигнал переключения;
39 - пятый нормально-разомкнутый переключатель.
Рассматривается система измерения вектора угловой скорости в бесплатформенной инерциальной навигационной системе.
Гироскопические измерители вектора угловой скорости (ГИВУС) 2 космического аппарата (КА) обладают тем достоинством, которое обеспечивает их автономность - без связи с Землей. Гироскопические датчики угловой скорости устанавливаются непосредственно на борту космического аппарата и связаны с бортовой вычислительной машиной, которая непрерывно производит расчет курса, крена и тангажа или иных параметров, определяющих ориентацию космического аппарата относительно базовой системы координат.
Вследствие уходов гироскопов их точность со временем падает, что можно считать недостатком гироскопических измерителей.
При этом вычислительная машина может производить и фильтрацию обрабатываемых сигналов.
Отказы чувствительных элементов ГИВУС 2 могут приводить к невыполнению задачи системы управления ориентацией КА [2].
Отдельное использование астродатчиков 13 приводит к наличию шумов при измерении угловой скорости КА, т.е. к зависимости измерений от внешних условий, а также к пропаданию сигналов измерения.
В случае известности дифференциального уравнения движения КА можно использовать математическую модель КА 19 для идентификации параметров и состояния КА (при условии, что параметры КА мало меняются во времени).
При этом показания астродатчиков 13 используются для поправки показаний вектора угловой скорости при гироизмерениях [2]. В некоторых режимах можно использовать показания только астродатчиков.
Использование четырех параметров (Родрига-Гамильтона, Кейли-Клейна) для описания конечного поворота твердого тела (КА) или с использованием кватернионов расширяют число подходов к построению бесплатформенной инерциальной системы [2].
В предложенном техническом решении для описания конечного поворота КА используются параметры Родрига-Гамильтона и математический аппарат кватернионов.
ГИВУС использует в своем составе четыре гироскопа согласно устройству для реализации способа измерения вектора угловой скорости (фиг.1). При исправных гироскопах сигнал вектора угловой скорости с выхода ГИВУС 2 поступает на формирователь гирокватерниона 3. Полученный на выходе сигнал поступает через первый нормально-замкнутый контакт 7 на вход третьего сумматора 15, выходной сигнал 23 которого используется для формирования управления 21.
После поступления сигнала неисправности одного из четырех гироскопов, входящих в состав ГИВУС 2, формируется сигнал 22, который подключает астродатчик 13 через второй нормально-разомкнутый переключатель 12. Сигнал астрокватерниона с выхода формирователя астрокватерниона 14 сравнивается с выходом сигнала гирокватерниона с выхода формирователя гирокватерниона 3.
Если разность сигналов гирокватерниона и астрокватерниона не превосходит по модулю |u| заданного значения, то контакт первого нормально-замкнутого переключателя 7 не размыкается. И для формирования управления 21 используется значение выхода формирователя гирокватерниона 3.
В противном случае контакт первого нормально-замкнутого переключателя 7 размыкается, а контакт первого нормально-разомкнутого переключателя 10 замыкается по команде с выхода первого формирователя сигнала переключения 6. В этом случае на выход третьего сумматора 15 проходит сигнал с выхода формирователя сигнала астрокватерниона 14 через переключатели 10 и 9.
Одновременно с замыканием нормально-разомкнутого контакта переключателя 10 формируется сигнал 25 на подключение модели 19 космического аппарата через третий нормально-разомкнутый переключатель 8 к сигналу управления 21.
Далее после выхода из строя астродатчика 13 сигнал на выходе нелинейного блока 17 превысит допуск, установленный его нелинейной характеристикой (фиг.2), второй формирователь сигнала переключения 18, второй нормально-замкнутый переключатель 9 отсоединит выход сигнала астрокватерниона 14 от входа третьего сумматора 15, а по команде сигнала переключения 24 выход формирователя кватерниона 20 будет подключен ко входу третьего сумматора 15.
На фиг.1 указаны векторные связи, кроме связей элементов схемы 3-4-5-6, 14-4, 14-16, 17-18 и 20-16.
Среднее значение угловой скорости формируется на выходе астродатчика 13 путем дифференцирования среднего значения угла. Среднее значение угла определяется на выходе апериодического звена, входящего в состав астроследящей системы [6].
Дифференциатор входит в состав астродатчика 13 вместе с астроследящей системой - на фиг.1 астродатчик имеет два выхода. Обозначение  является средним значением угловой скорости по углу крена φ(t), т.е. это полная производная по времени t угла крена
является средним значением угловой скорости по углу крена φ(t), т.е. это полная производная по времени t угла крена
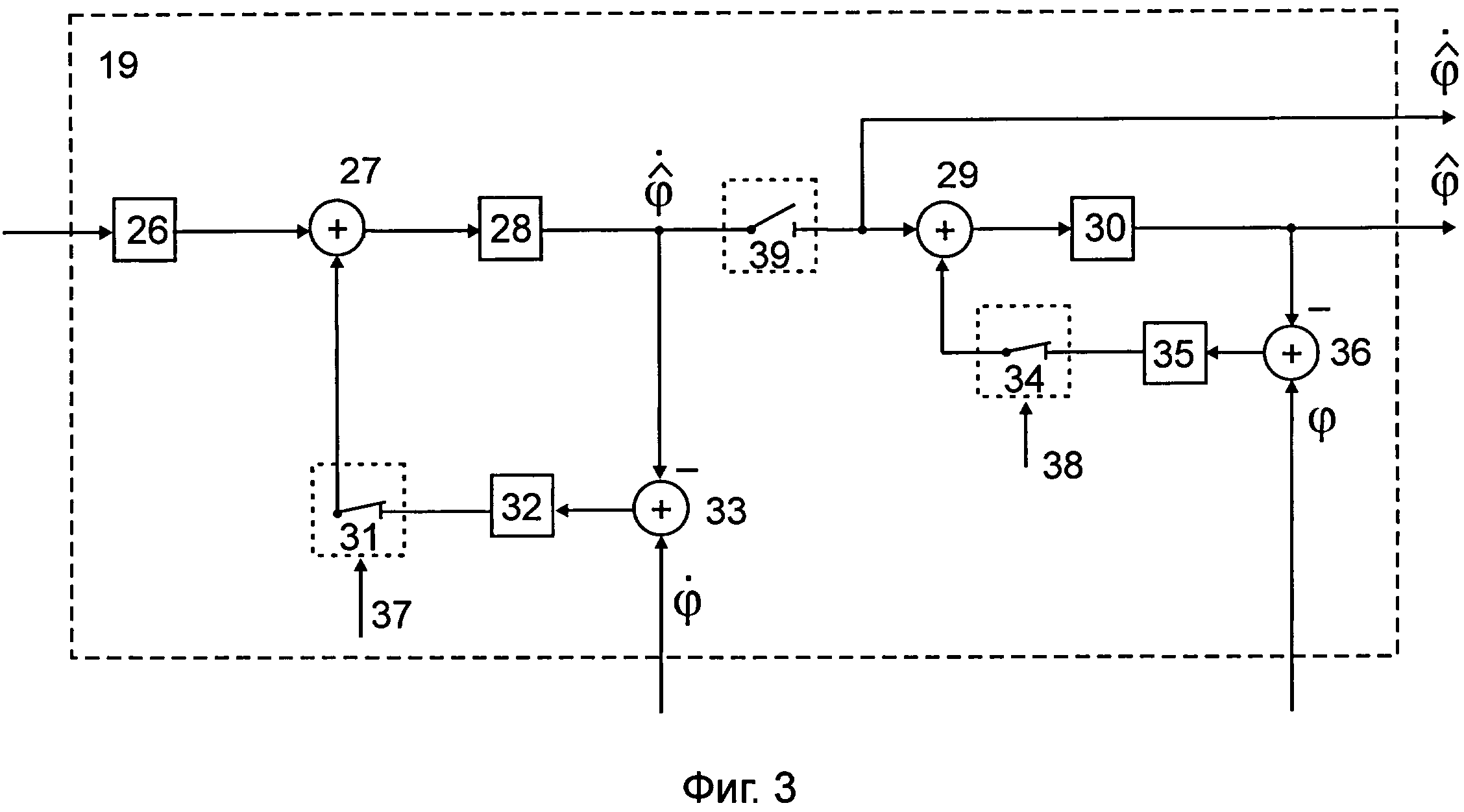
Значение  поступает по схеме фиг.1 на вход формирователя сигнала астрокватерниона 14 и совместно с углом крена φ(t) на один из входов математической модели 19. На фиг.3 изображена структурная схема математической модели только по углу крена φ(t), на которой приведены добавленные элементы: 27, 31, 32 и 33 - для установки начальных условий на выходе первого интегратора 28, и добавленные элементы: 29, 34, 35 и 36 - для установки начальных условий на выходе второго интегратора 30.
поступает по схеме фиг.1 на вход формирователя сигнала астрокватерниона 14 и совместно с углом крена φ(t) на один из входов математической модели 19. На фиг.3 изображена структурная схема математической модели только по углу крена φ(t), на которой приведены добавленные элементы: 27, 31, 32 и 33 - для установки начальных условий на выходе первого интегратора 28, и добавленные элементы: 29, 34, 35 и 36 - для установки начальных условий на выходе второго интегратора 30.
Установка начальных условий на выходах первого 28 и второго 30 интеграторов необходима для плавного перехода с измерений астродатчиком 13 на измерения с помощью математической модели 19.
Среднее значение поступает на вход пятого сумматора 33, на второй вход которого поступает сигнал  с выхода первого интегратора 28. На выходе пятого сумматора 33 разностный сигнал
с выхода первого интегратора 28. На выходе пятого сумматора 33 разностный сигнал  , который через последовательно соединенные первый усилитель 32, третий нормально-замкнутый переключатель 31 и третий сумматор 27 поступает на вход первого интегратора 28. На выходе первого интегратора 28 сигнал изменяется до тех пор, пока не станет выполняться равенство
, который через последовательно соединенные первый усилитель 32, третий нормально-замкнутый переключатель 31 и третий сумматор 27 поступает на вход первого интегратора 28. На выходе первого интегратора 28 сигнал изменяется до тех пор, пока не станет выполняться равенство  .
.
Аналогично устанавливаются начальные условия  на выходе второго интегратора 30 с помощью элементов схемы фиг.3: 29, 34, 35 и 36.
на выходе второго интегратора 30 с помощью элементов схемы фиг.3: 29, 34, 35 и 36.
В момент перехода измерений с выхода астродатчика 13 на выход математической модели 19 нормально-замкнутые переключатели 31 и 34 размыкаются, а нормально-разомкнутый переключатель 39 замыкается. Значение  поступает на вход формирователя кватерниона сигнала идентификации 20.
поступает на вход формирователя кватерниона сигнала идентификации 20.
Структуры математической модели 19 по углам тангажа ν(t) и рыскания ψ(t) имеют аналогичное изображение, полностью совпадающее со структурой угла крена по фиг.3.
Формирователи сигнала гирокватерниона 3, астрокватерниона 14 и кватерниона сигнала идентификации являются обычными кватернионами и отличаются только входными сигналами - на вход первого поступает сигнал с выхода ГИВУС, на вход второго - с выхода астродатчика, а на вход третьего - с выхода математической модели 19. На выходах формирователей кватернионов 3, 14 и 20 формируется векторный сигнал, состоящий из пяти сигналов: коэффициентов λ0, λ1, λ2, λ3 и ||Λ||2 по обозначениям, приведенным в [3], и которые определяют кватернион Λ в четырехмерном пространстве H в виде точки Λ=λ0+λ1i+λ2j+λ3K, или в виде точки  .
.
Составляющие с выхода формирователя сигнала гирокватерниона 3 λ0, λ1, λ2, λ3 через четыре параллельных нормально-замкнутых контакта переключателя 7 соответственно поступают на один из входов третьего сумматора 15.
Сигналы  и
и  с выходов формирователя сигнала гирокватерниона 3 и формирователя сигнала астрокватерниона 14 соответственно сравниваются.
с выходов формирователя сигнала гирокватерниона 3 и формирователя сигнала астрокватерниона 14 соответственно сравниваются.
Если разностный сигнал  больше допустимого U2, установленного в первом нелинейном блоке 5, срабатывает первый формирователь сигнала переключения 6, который размыкает четыре нормально-замкнутых контакта первого переключателя 7 и замыкает четыре контакта первого нормально-разомкнутого переключателя 10. При этом на второй вход третьего сумматора 15 поступают уже значения λ0, λ1, λ2, λ3 с выхода формирователя сигнала астрокватерниона 14. Сигнал на входе первого нелинейного блока 5 превысит пороговое значение U2 при значительных «уходах» гироскопов, в том числе и при выходе из строя одного или двух гироскопов.
больше допустимого U2, установленного в первом нелинейном блоке 5, срабатывает первый формирователь сигнала переключения 6, который размыкает четыре нормально-замкнутых контакта первого переключателя 7 и замыкает четыре контакта первого нормально-разомкнутого переключателя 10. При этом на второй вход третьего сумматора 15 поступают уже значения λ0, λ1, λ2, λ3 с выхода формирователя сигнала астрокватерниона 14. Сигнал на входе первого нелинейного блока 5 превысит пороговое значение U2 при значительных «уходах» гироскопов, в том числе и при выходе из строя одного или двух гироскопов.
Функционирование второго сумматора 16, второго нелинейного блока 17, формирователя сигнала переключения 18 и второго нормально-замкнутого переключателя 9 аналогично функционированию первого сумматора 4, первого нелинейного блока 5, первого формирователя сигнала переключения 6 и первого нормально-замкнутого переключателя 7.
Изображение многомерных матричных блоков и схем общеизвестно в системах управления [4] при моделировании [5].
Таким образом, гироскопы ГИВУС′а 2, астродатчик 13 и модель КА 19 будут подключаться по очереди: в начале работы КА 1 будут использованы для формирователя управления 21 гироскопы, после отказа гироскопов астродатчик 13, а затем после отказа астродатчика 13 - модель КА 19.
Технический результат от применения предложенного технического решения (способа и устройства для его реализации) заключается в повышении надежности измерения вектора угловой скорости КА.
Изобретательский уровень предложенного технического решения задачи подтверждается отличительной частью формулы изобретения на способ измерения вектора состояния и устройства для его реализации.
Литература
1. Б.Я. Лурье, П.Дж. Энрайт, Классические методы автоматического управления. - Санкт-Петербург: Изд-во БХВ-Петербург, 2004. - С.158-159.
2. Уханов Е.В. Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата. Дипломная работа. - Харьков, 2005. - НТУ «Харьковский политехнический ин-т». С.35-85 и 15-34 (соответственно «способ» и «устройство). Прототип.
3. Применение кватернионов в задачах ориентации твердого тела. В.Н. Бранец, И.П. Шмыглевский. - М.: Наука, 1973. - С.11-12.
4. В.В. Семенов, А.В. Пантелеев, А.С. Бортаковский. Математическая теория управления в примерах и задачах. - М.: Изд-во МАИ, 1997. - С.13-14, 26-27.
5. И.В. Черных. Simulink: Среда создания инженерных приложений. - М.: Диалог - МИФИ, 2003. - С.32-294.
6. Астроследящие системы. Под редакцией Б.К. Чемоданова. - М.: Машиностроение, 1973. - С.155, 151, 159.
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации

