Результат интеллектуальной деятельности: СИСТЕМА ИНДИКАЦИИ ВЫСОТЫ ЛЕТАТЕЛЬНОГО АППАРАТА (ЛА) НАД ПОРОГОМ ВЗЛЕТНО - ПОСАДОЧНОЙ ПОЛОСЫ (ВПП)
Вид РИД
Изобретение
Изобретение относится к светотехнике, в частности к светосигнальным системам посадки, предназначенным для визуальной индикации высоты пересечения порога ВПП в процессе совершения посадки летательного аппарата в ночное время, в сумерках и сложных метеоусловиях.
Известны требования Международного стандарта ИКАО к запасу высоты колес шасси над порогом ВПП [1] (Приложение 14 к Конвенции о международной гражданской авиации. Аэродромы. - Том I. - Проектирование и эксплуатация аэродромов. Издание четвертое. - М.: Авиаиздат, 2004. - 272 с. - Глава 5, Таблица 5-2, Стр.5-36), в которых, в зависимости от вертикального расстояния между уровнем глаз пилота и колесами шасси для конкретных типов ЛА, приведены значения желательного и минимального запасов высоты колес шасси над порогом ВПП при его пресечении.
Известна система визуальной посадки типа T-VASIS [2] (Басов Ю.Г. Светосигнальные устройства. - М.: Транспорт, 1993. - Стр.142), которая состоит из 20 глиссадных огней, симметрично расположенных относительно оси ВПП. Система обеспечивает (создает) при посадке дискретную ИНФОРМАЦИЮ (индикацию) о нахождении ЛА в одной из световых зон. При пресечении порога ВПП пилот ЛА может определить, в какой из четырех зон с высотой (13…17) м, (17…22) м, (22…28) м или (28…54) м над порогом ВПП находится ЛА ([1] Стр.5-29).
Недостатками данной системы являются: дискретность и невысокая точность индикации высоты пересечения порога ВПП, а также невысокая эргономичность системы из-за расположения огней сбоку от ВПП за пределами области резкого изображения (6-8°) зрительного анализатора человека [3] (Сомов Е.Е. Офтальмоэргономика операторской деятельности летного состава. - СПб.: Политехника, 1992. - Стр.51), а также конструктивная сложность системы.
Известна система визуальной посадки типа PAPI [2] (Басов Ю.Г. Светосигнальные устройства. - М.: Транспорт, 1993. - Стр.144), которая состоит из 4-х огней, расположенных с левой стороны от боковой границы ВПП перпендикулярно ее продольной оси, в виде огней фланговых горизонтов. Система PAPI формирует 3 световые зоны, отличающиеся цветом и количеством огней каждого цвета, по которым пилот определяет нахождение ЛА в определенной зоне с угловыми размерами 2°30'…2°50', 2°50'…3°10' и 3°10'…3°30'. При пересечении порога ВПП пилот ЛА получает визуальную индикацию о нахождении ЛА в одной из 3-х зон с высотой (13…15) м, (15…17) м или (17…19) м над порогом ВПП.
Недостатками известной системы визуальной посадки типа PAPI [2] являются дискретность информации о высоте ЛА над порогом ВПП и ограниченный диапазон индикации высоты пересечения порога ВПП, что не в полной мере согласуется с рекомендациями ИКАО для высоты пересечения порога ВПП различными типами ЛА. Кроме того, недостатком системы типа PAPI [2] является невысокая эргономичность обозначения высоты над порогом ВПП из-за расположения ее сбоку от ВПП за пределами области резкого изображения (6-8°) зрительного анализатора человека [3] (Сомов Е.Е. Офтальмоэргономика операторской деятельности летного состава. - СПб.: Политехника, 1992. - Стр.51), что отвлекает внимание пилота от визуальной ориентации вдоль оси ВПП, на которой расположена разметка и (или) световые индикаторы зоны приземления.
Целью изобретения является обеспечение визуальной информации о высоте летательного аппарата над порогом взлетно-посадочной полосы (ВПП) на завершающем этапе посадки, повышение точности и расширение диапазона индикации высоты пересечения порога ВПП, а также устранение дискретности индикации и повышение эргономичности визуальной системы.
Поставленная цель достигается применением известного технического решения, а именно системы ориентации движущегося объекта относительно оси взлетно-посадочной полосы (ВПП) [4] (патент РФ №2434791, кл. B64F 1/18, G08G 5/02, 2010), в которой два лазерных излучателя установлены в начале ВПП в "одной точке" на оси ВПП с одинаковым углом наклона лазерных лучей к плоскости ВПП, при этом лучи лазерных излучателей симметрично разведены относительно вертикальной плоскости, проходящей через ось ВПП под небольшими (до 5 градусов) равными углами.
Сущность изобретения на применение по новому назначению известного технического решения, а именно "Системы ориентации движущегося объекта относительно оси взлетно-посадочной полосы (ВПП)" (патент РФ №2434791, кл. B64F 1/18, G08G 5/02, 2010), для целей индикации высоты летательного аппарата (ЛА) над порогом взлетно-посадочной полосы (ВПП) в процессе посадки поясняет фиг.1, фиг.2 и фиг.3 (а, б, в).
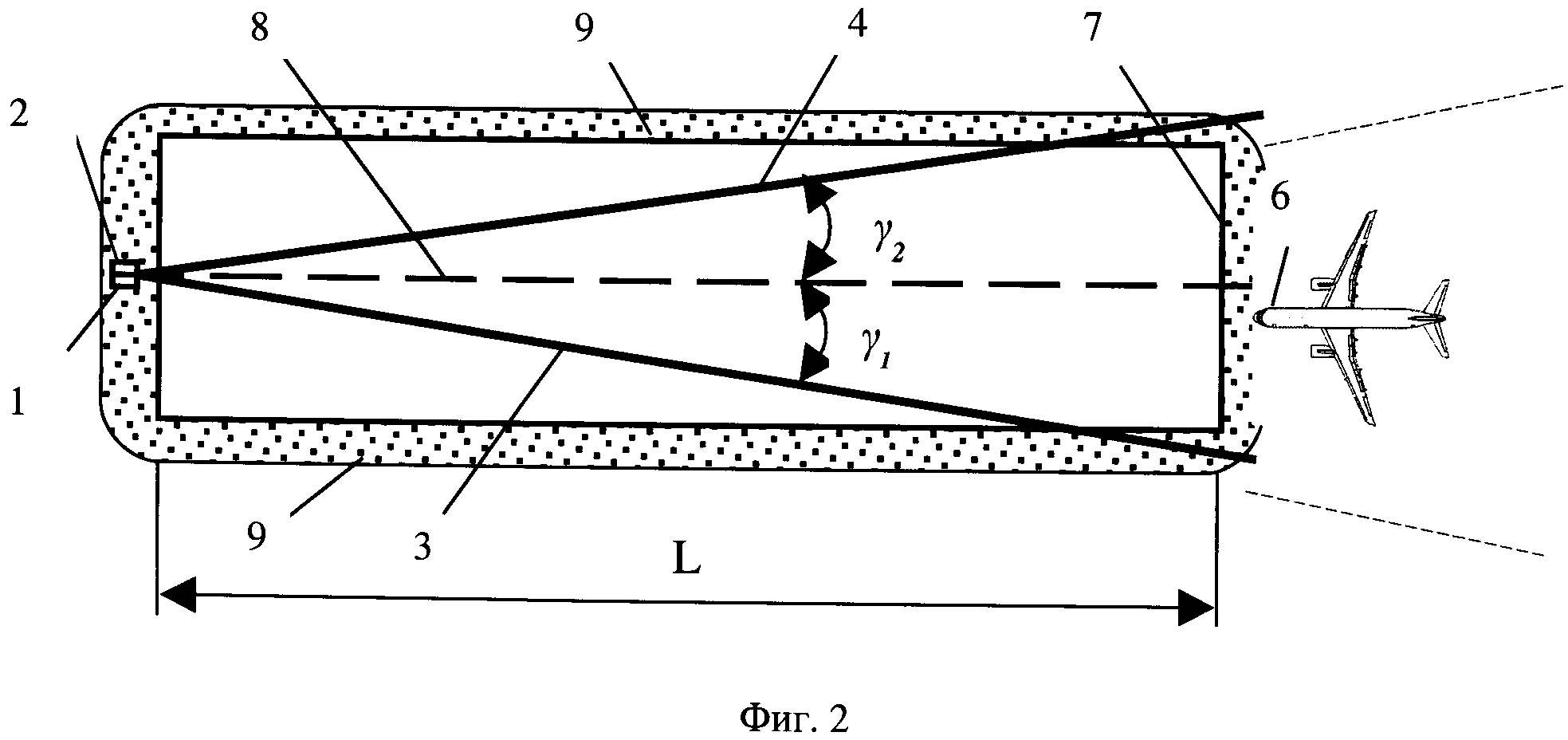
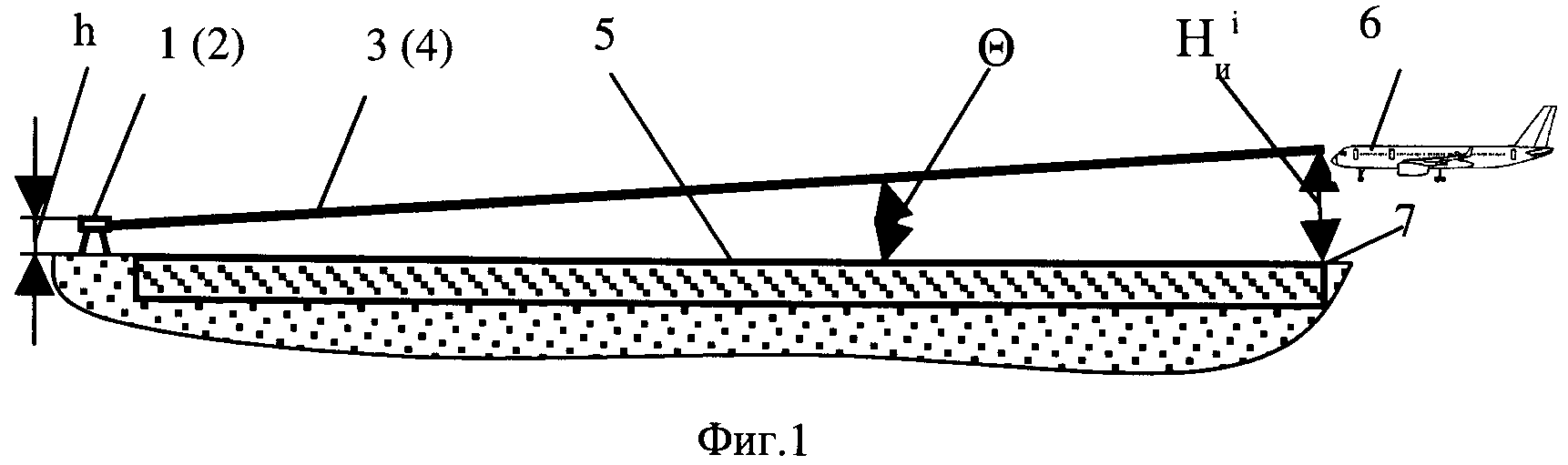
На фиг.1-2 приведена схема расположения лазерных излучателей относительно плоскости ВПП и направление лазерных лучей в пространстве. На фиг.3 (а, б, в) показаны проекции лазерных лучей на фронтальную плоскость, зрительно воспринимаемые пилотом при различных высотах ЛА в момент пересечения порога ВПП.
На фиг.1, фиг.2 и фиг.3 (а, б, в) приняты следующие обозначения: 1 - первый лазерный излучатель; 2 - второй лазерный излучатель; h - высота установки лазерных излучателей; 3 - луч первого излучателя; 4 - луч второго излучателя; 5 - плоскость ВПП; Θ - угол наклона плоскости расположения лазерных лучей к плоскости ВПП; 6 - летательный аппарат; 7 - порог ВПП; Hи i - заданная высота пересечения порога ВПП для ЛА i-типа; 8 - геометрическая продольная ось ВПП; 9 - продольные границы ВПП; γ1, γ2 - углы лазерных лучей относительно осевой вертикальной плоскости; L - длина ВПП.
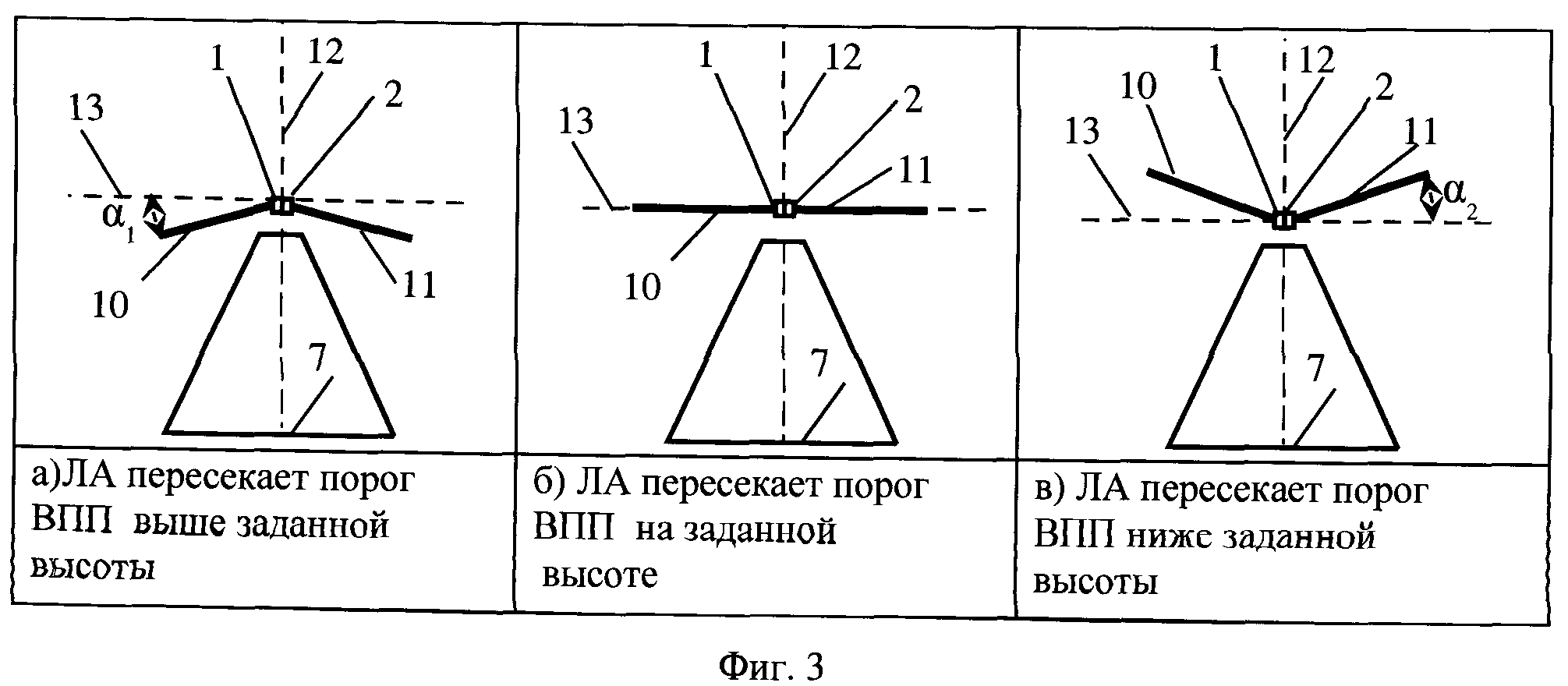
Кроме того, на фиг.3 (а, б, в) дополнительно имеются следующие обозначения: 10 - проекция на плоскость визирования первого (левого) лазерного луча, зрительно воспринимаемая пилотом ЛА; 11 - проекция на плоскость визирования второго (правого) лазерного луча, зрительно воспринимаемая пилотом ЛА; 12 - вертикаль, проходящая через точку установки лазерных излучателей; 13 - горизонталь, проходящая через точку установки лазерных излучателей; α1 - угол между проекцией левого лазерного луча на фронтальную плоскость и горизонталью 13; α2 - угол между проекцией правого лазерного луча на фронтальную плоскость и горизонталью 13;
Как видно из фиг.1-2, лазерные излучатели 1 и 2 установлены вблизи конца ВПП за ее пределами на высоте h (h не более 0.5 м). Лучи лазерных излучателей 1 и 2 направлены под углом Θ к плоскости ВПП 5 и разведены симметрично относительно осевой вертикальной плоскости на равные углы γ1 и γ2 (γ1=γ2).
Угол наклона лазерных лучей к плоскости ВПП Θ в соответствии с известным техническим решением (патент РФ №2434791, кл. B64F 1/18, G08G 5/02, 2010) должен быть меньше угла траектории снижения ЛА, то есть меньше 2,5…3 градусов.
Для индикации высоты пересечения порога ВПП по предлагаемому техническому решению необходимо, чтобы лучи 3 и 4 пересекали порог ВПП либо на стандартной высоте (15 м), либо перед посадкой ЛА устанавливались на высоте, соответствующей нормам ИКАО или иным стандартами и технической характеристике ЛА, выполняющего посадку. Нетрудно посчитать, что данное условие не ограничивает применение предлагаемого технического решения (патент РФ №2434791, кл. B64F 1/18, G08G 5/02, 2010), даже при минимальной длине ВПП, равной 800 м, и высоте пересечения порога ВПП - 15 м, угол для индикации высоты летательного аппарата (ЛА) над порогом ВПП Θ будет около одного градуса.
Для точной посадки конкретных типов ЛА угол наклона плоскости расположения лазерных лучей к плоскости ВПП Θ выбирается из расчета заданной высоты пересечения порога ВПП для конкретного типа ЛА (Ни i) с учетом длины (L) ВПП из очевидного соотношения:
Θ=arctg Ни i/L.
Такое расположение лучей позволяет пилоту ЛА ночью, в сумерках и сложных метеоусловиях при совершении посадки в момент пересечения порога ВПП видеть проекции лазерных лучей на фронтальную плоскость в виде линейных ориентиров 10 и 11 (фиг.3 а, б, в).
На фиг.3 (а, б, в) схематично показаны три варианта проекций лазерных лучей на плоскость визирования, зрительно воспринимаемых пилотом ЛА в момент пересечения порога ВПП:
а - ЛА пересекает порог ВПП выше заданной высоты;
б - ЛА пересекает порог ВПП на заданной высоте;
в - ЛА пересекает порог ВПП ниже заданной высоты.
По виду линейных ориентиров 10 и 11 (фиг.3 а, б, в), образованных лучами 3 и 4, пилот определяет положение ЛА в момент пересечения порога ВПП, то есть пересечение порога прошло на заданной высоте (фиг.3б), выше (фиг.3а) расчетной высоты или ниже (фиг.3б) расчетной высоты пересечения порога ВПП. По величине углов α1 и α2 пилот оценивает высоту, на которую отклонился ЛА. Возможность управления направлением лазерных лучей в пространстве позволяет устанавливать лазерные излучатели для любой ВПП на высоте, соответствующей техническим характеристикам ЛА, выполняющего посадку и рекомендациям стандартов. Управление оптическими и пространственными параметрами лучей выполняется по заранее заданному алгоритму с помощью функционально связанного контроллера и блока управления.
Возможность управления оптическими и пространственными параметрами лучей по заранее заданному алгоритму с помощью функционально связанного контроллера и блока управления позволяет адаптировать видимость правого и левого лучей при изменении фона, метеоусловий, времени года, внешних засветок и т.п, а также передавать информацию об изменении алгоритма посадки в случае возникновения нештатной ситуации.
Возможность управления направлением лазерных лучей в пространстве позволяет для конкретных категорий ВПП и типов ЛА оптимизировать величину углов разведения (γ1 и γ2) лазерных лучей относительно осевой вертикальной плоскости с целью улучшения видимости лучей при изменении метеовидимости.
Возможность амплитудной модуляции мощности излучения позволяет улучшать видимость лучей при изменении погодных условий или освещенности путем увеличения мощности излучателей и (или) путем импульсной модуляции, параметры которой могут нести дополнительную информацию с указанием о необходимости изменения режима посадки.
Возможность изменения спектрального состава (цвета) излучения, например, в область более коротких длин волн позволяет улучшить видимость лучей в условиях особо высокой метеовидимости при малом количестве рассеивающих частиц в атмосфере, а изменения спектрального состава в область более длинных длин волн - в условиях плохой метеовидимости (высокой степени рассеивания оптического излучения).
Практическая проверка обоснованности применения известной "Системы ориентации движущегося объекта относительно оси взлетно-посадочной полосы (ВПП)" по новому назначению - в качестве визуальной системы индикации высоты ЛА над порогом взлетно-посадочной полосы (ВПП) дала положительные результаты. При испытании системы подтверждена информационность известного устройства в части индикации высоты ЛА над порогом взлетно-посадочной полосы (ВПП).
Литература
1. Приложение 14 к Конвенции о международной гражданской авиации. Аэродромы. - Том I. - Проектирование и эксплуатация аэродромов. Издание четвертое. - М.: Авиаиздат, 2004. - 272 с.
2. Басов Ю.Г. Светосигнальные устройства. - М.: Транспорт, 1993. - 309 с.
3. Сомов Е.Е. Офтальмоэргономика операторской деятельности летного состава. - СПб.: Политехника, 1992. - 151 с.
4. Патент РФ №2434791, кл. B64F 1/18, G08G 5/02, 2010.
Система посадки летательных аппаратов
Лазерная система посадки летательных аппаратов (ла) на малоразмерные взлетно-посадочные площадки (впп)
Аэродромное световое устройство (варианты)
Способ и система защиты воздушных судов от ракет переносных зенитных ракетных комплексов
Система визуальной посадки летательных аппаратов (ла)
Способ визуальной посадки летательных аппаратов (ла)
Лазерная система посадки летательных аппаратов (ла) на малоразмерные взлетно-посадочные площадки (впп)
Лазерная система посадки воздушных судов
Лазерная система посадки летательных аппаратов (ла)
Способ противодействия управляемым боеприпасам
Система посадки летательных аппаратов
Лазерная система посадки летательных аппаратов (ла) на малоразмерные взлетно-посадочные площадки (впп)
Аэродромное световое устройство (варианты)
Способ и система защиты воздушных судов от ракет переносных зенитных ракетных комплексов
Система визуальной посадки летательных аппаратов (ла)
Способ визуальной посадки летательных аппаратов (ла)
Лазерная система посадки летательных аппаратов (ла) на малоразмерные взлетно-посадочные площадки (впп)
Лазерная система посадки воздушных судов
Лазерная система посадки летательных аппаратов (ла)
Способ противодействия управляемым боеприпасам

