Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ
Вид РИД
Изобретение
Способ относится к технике пространственного наведения и сопровождения подвижных точечных объектов и используется в автоматических системах с редкими посылками за период сканировании.
Известен способ формирования управления приводами
исполнительного устройства (патент RU №2310888, МПК G01S 17/66, G05D 3/12, дата приоритета 10.05.2006, дата опубликования 20.11.2007), включающий формирование кадров видеоизображения, вычисление координат центра сопровождаемого объекта на изображении, определение координат объекта в неподвижно ориентированной относительно поверхности Земли системе координат, а также в подвижной системе координат, формирование сигналов на электроприводы для отработки требуемых угловых положений рамок исполнительного устройства, в неподвижно ориентированной системе координат, с учетом возникающего при обработке изображений запаздывания межкадровое определение прогнозируемых координат объекта, прогнозирование координат объекта в случае пропадания информации о сопровождаемом объекте на изображении, формирование требуемых углов положения рамок исполнительного устройства с учетом компенсации вращения фоноцелевой обстановки на изображении.
Недостатком аналога является низкая надежность слежения привода за скоростными целями в случае малой кадровой частоты формирования изображения и, соответственно, редкого определения координат цели. Формирование межкадрового изображения с помощью прогнозаторов связано с вычислением скоростей и ускорений цели. Прогнозаторы предполагают включение в систему дифференцирующих устройств, которые повышают уровень высокочастотных помех, проникающих в систему и понижающих отношение сигнал/шум.
Наиболее близким по физической сущности и достигаемому техническому результату и выбран в качестве прототипа способ управления инерционным приводом антенны (патент RU №2216030, МПК G05D 3/12, дата приоритета 21.06.2001, дата опубликования 10.11.2003), состоящий в том, что формируют сигнал ошибки сопровождения по пеленгу цели вычитанием из значения оцененного сигнала пеленга цели значения оцененного сигнала угла поворота антенны и усиливают его с постоянным, зависящим от свойств привода антенны коэффициентом усиления, дополнительно формируют сигналы ошибок сопровождения по всем оцениваемым в фильтре угломера производным пеленга цели вычитанием из каждого значения оцененного сигнала производной пеленга цели значения оцененного сигнала производной угла поворота антенны, усиливают каждый из упомянутых сигналов ошибок сопровождения по производным пеленга цели, а также сигнал оценки пеленга цели и сигналы оценок каждой производной пеленга цели с различными постоянными, зависящими от свойств привода антенны коэффициентами усиления и складывают их с усиленным сигналом ошибки сопровождения по пеленгу цели, образуя сигнал управления приводом антенны.
Недостатком прототипа является низкая надежность захвата приводом скоростной цели в случае малой частоты посылок зондирующих импульсов, характерной для лазерных оптических систем. Например, при посылке 4-5 импульсов на период сканирования диаграммы направленности антенны возможны срывы и переход системы в режим поиска. Кроме того, в режиме слежения имеется установившаяся ошибка в силу пропорционально-дифференциального закона регулирования, используемого в прототипе.
Решается задача повышения надежности захвата цели в случае редких посылок зондирующих импульсов и точности слежения за быстро летящей точечной целью.
Указанный технический результат достигается тем, что в известном способе управления инерционным приводом антенны, состоящем в том, что формируют сигнал ошибки сопровождения по пеленгу цели вычитанием из значения оцененного сигнала пеленга цели значения оцененного сигнала угла поворота антенны и усиливают его с зависящим от свойств привода антенны коэффициентом усиления, формируют сигналы ошибок сопровождения по всем оцениваемым в фильтре угломера производным пеленга цели вычитанием из значения оцененного сигнала каждой производной пеленга цели значения оцененного сигнала каждой производной угла поворота антенны, усиливают каждый из упомянутых сигналов ошибок сопровождения по производным пеленга цели с различными, зависящими от свойств привода антенны коэффициентами усиления и складывают их с усиленным сигналом ошибки сопровождения по пеленгу цели, образуя сигнал управления приводом антенны, для образования сигнала управления приводом антенны на j-м зондирующем импульсе, коэффициенты усиления меняют синхронно с посылками зондирующих импульсов, где j - номер текущего зондирующего импульса.
Тот же результат достигается тем, что коэффициенты усиления меняют периодически с периодом сканирования диаграммы направленности антенны, а сканирование диаграммы направленности антенны синхронизируют с последовательностью посылок зондирующих импульсов.
Тот же результат достигается тем, что после уменьшения сигнала ошибки слежения по пеленгу цели до определенной заданной величины, зависящей от ширины диаграммы направленности антенны, сигнал цифрового интеграла от ошибки сопровождения по пеленгу цели на j-м зондирующем импульсе усиливают с интегральным коэффициентом усиления, зависящим от свойств привода антенны, и складывают с усиленным сигналом ошибки сопровождения по пеленгу цели на j-м зондирующем импульсе, с усиленным сигналом ошибки сопровождения по пеленгу цели на j-м зондирующем импульсе и с усиленными сигналами ошибок сопровождения по производным пеленга цели на j-м зондирующем импульсе, образуя сигнал управления приводом антенны на j-м зондирующем импульсе, а интегральный коэффициент усиления меняют синхронно с посылками зондирующих импульсов и периодически с периодом сканирования диаграммы направленности антенны.
По сравнению с прототипом изобретение имеет новую совокупность существенных признаков, т.е. отвечает критерию новизны.
Сущность изобретения заключается в том, что в режиме захвата и слежения за подвижной точечной целью для формирования сигнала управления в угломерном приводе используется информация о частоте посылок зондирующих импульсов. Особенно эта информация актуальна, когда посылки зондирующих импульсов сравнительно редки по сравнению с частотой сканирования луча, обусловленной динамикой исполнительных антенных устройств. Редкая частота посылок связана с особенностями работы лазерных генераторов оптического излучения, частота накачки которых ограничена. Фактически в промежутках времени между приемом отраженных от цели импульсов зондирующего излучения система слежения по углам оказывается разомкнутой. В этот момент и возможны срывы слежения. Поэтому для учета дискретности измерений предлагается дискретная модель угломерных каналов локатора с периодически изменяющимися коэффициентами:

где x - вектор состояния, x∈Rn; x(0) - вектор начальных состояний; y - вектор регулируемых величин, y∈Rl; m=0, 1, 2,… - дискретные моменты времени, задающие текущий номер периода сканирования; k - интервал периодичности, равный количеству посылок зондирующих импульсов за период сканирования; i=0, 1,…, (k-1) - номер временного шага внутри периода сканирования или номер зондирующего импульса внутри периода сканирования; Fi+1 - k-периодическая матрица описания замкнутой модели на (i+1)-м шаге внутри периода сканирования, размерностью n×n; Ci+1 - k-периодическая матрица выхода на (i+1)-м шаге внутри периода сканирования, размерностью l×n.
Координаты х вектора состояния представляют собой оценку пеленга, оценку угловой скорости пеленга, оценку углового ускорения пеленга и т.д. В общем случае модель (1) используется для описания обоих угломерных каналов, азимутального и угла места. Тогда размерность вектора состояния удваивается.
Сведем описание линейной нестационарной системы к стационарной, рассмотрев поведение траекторий движения системы (1) через период сканирования. Для этого запишем уравнения движения этой системы на каждом шаге внутри периода сканирования при двух значениях дискретных моментов времени m=0 и m=1
- момент времени m=0
- момент времени m=1
Анализ систем уравнений (2) и (3) показывает, что, в общем виде, через период сканирования уравнения движения системы (1) принимают вид:

где  - периодическая обобщенная матрица описания (i+1)-го уравнения движения замкнутой системы через период сканирования; x(i)- вектор обобщенных начальных состояний (i+1)-го уравнения движения замкнутой системы через период сканирования, который вычисляется следующим образом:
- периодическая обобщенная матрица описания (i+1)-го уравнения движения замкнутой системы через период сканирования; x(i)- вектор обобщенных начальных состояний (i+1)-го уравнения движения замкнутой системы через период сканирования, который вычисляется следующим образом:

Через период сканирования линейную дискретную систему с периодически изменяющимися коэффициентами можно рассматривать как линейную стационарную дискретную систему.
Линейная стационарная дискретная система будет устойчива, если корни матрицы замкнутой системы находятся внутри единичного круга. По аналогии следует, что система (4) будет устойчива, если собственные числа матриц  , будут находиться внутри единичного круга. Таким образом, для того чтобы дискретная система с периодически изменяющимися коэффициентами была устойчива, собственные числа всех k матриц уравнений движения замкнутой системы через период сканирования должны находиться в круге единичного радиуса.
, будут находиться внутри единичного круга. Таким образом, для того чтобы дискретная система с периодически изменяющимися коэффициентами была устойчива, собственные числа всех k матриц уравнений движения замкнутой системы через период сканирования должны находиться в круге единичного радиуса.
Матрицы Fi+1 представляются в виде Fi+1=Ai+1-Bi+1Ki+1, где Ai+1 - периодическая матрица описания разомкнутого привода на (i+1)-м шаге внутри периода сканирования, размерностью n×n; Bi+1 - периодическаяматрица входов разомкнутого привода по управляющему воздействию на (i+1)-м шаге внутри периода сканирования, размерностью n×l; Ki+1 - периодическая матрица линейных обратных связей (ЛОС) по состояниям разомкнутого привода на (i+1)-м шаге внутри периода сканирования размерностью l×n.
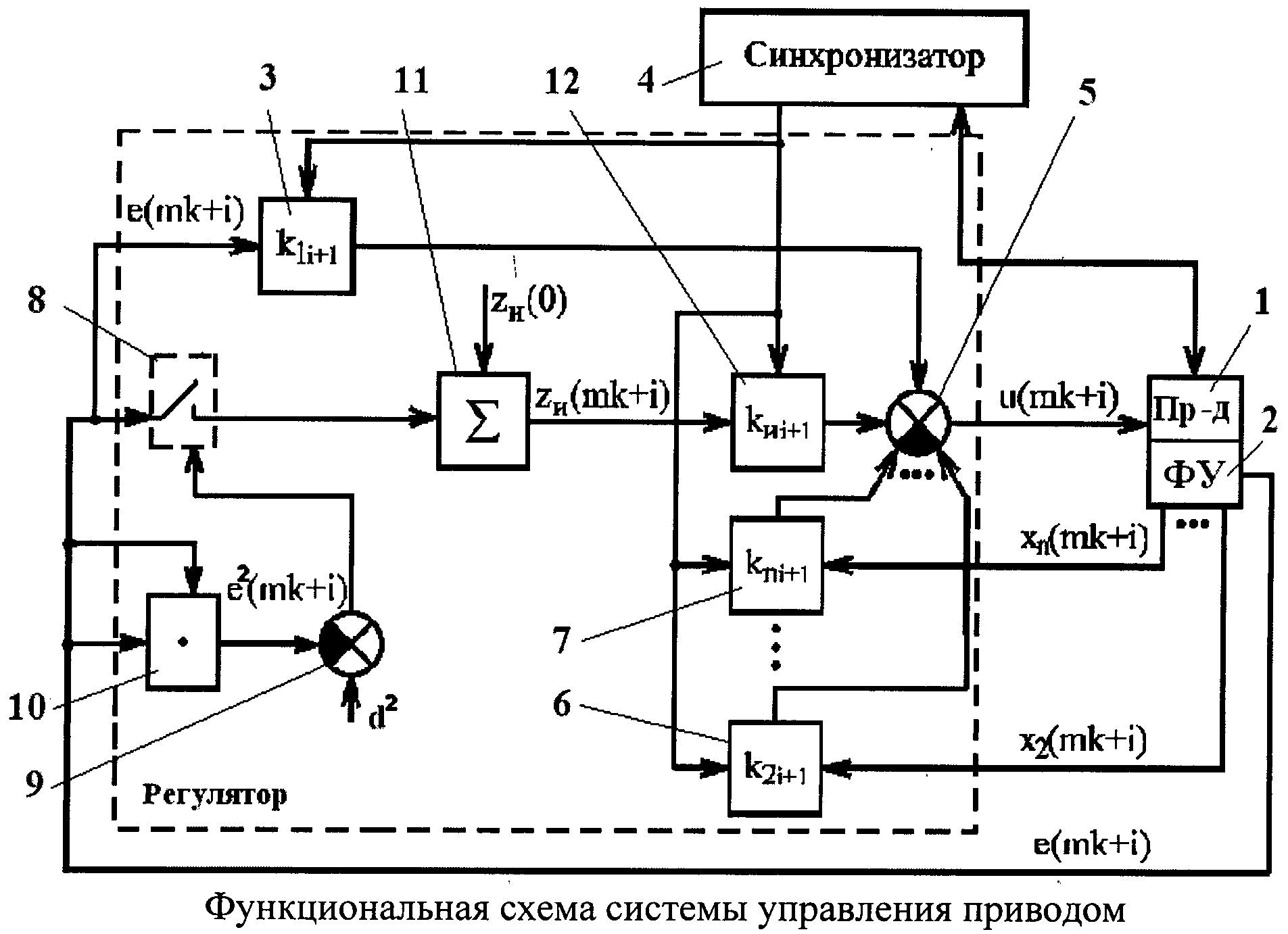
Сущность изобретения поясняется чертежом, на фиг.1 которого представлена функциональная схема системы управления приводом, в которой реализуется заявленный способ.
На чертеже введены следующие обозначения: 1 - привод антенны, 2 - фильтр угломера, 3 - первый усилитель, 4 - синхронизатор, 5 - первый сумматор, 6 - второй усилитель, 7- n-й усилитель, 8 - ключ, 9 - второй сумматор, 10 - умножитель, 11-цифровой интегратор, 12 - усилитель интегрального сигнала, где привод 1 антенны подключен к синхронизатору 4, выход которого подключен к синхронизирующим входам первого усилителя 3, второго усилителя 6, n-го усилителя 7, усилителя интегрального сигнала 12, выход привода 1 антенны подключен ко входу фильтра 2 угломера, первый выход которого подключен к информационному входу первого усилителя 3, к первому и второму входам умножителя 11 и к информационному входу ключа 8, второй выход подключен к информационному входу второго усилителя 6, n-й выход подключен к информационному входу n-го усилителя 7, выход умножителя 10 подключен к инвертирующему входу второго сумматора 9, выход которого подключен к управляющему входу ключа 6, выход которого через последовательно соединенный цифровой интегратор 11 подключен к информационному входу усилителя интегрального сигнала 12, выход которого подключен к одному входу первого сумматора 5, к другим входам которого подключены соответственно выходы первого усилителя 3, второго усилителя 6, n-го усилителя 7, а выход первого сумматора 5 подключен ко входу привода 1 антенны.
Сигнал управления u(mk+i) приводом 1 антенны формируется следующим образом. В момент захвата цели, определяемого дальномерным каналом (на фиг.1 не показан), с входа фильтра угломера 2 формируют сигнал ошибки сопровождения по пеленгу цели e(mk+i), имеющий дискретный характер. Например, для k=5 (i=1, 2, 3, 4), т.е. для пяти посылок зондирующих импульсов на период сканирования, в нулевой период сканирования (m=0) формируют последовательно 5 импульсов сигнала ошибки: e(0), e(1), e(2), e(3), e(4). Каждый из этих сигналов усиливают в первом усилителе 3 с коэффициентами усиления K11, K12, K13, K14, K15 соответственно. Коэффициенты рассчитаны заранее в результате синтеза управления и заложены в память усилителя 3. Смена коэффициента происходит от импульсного сигнала, поступающего на синхронизирующий вход первого усилителя 3 с синхронизатора 4. Усиленный сигнал ошибки сопровождения по пеленгу цели с выхода первого усилителя 3 подают на первый вход первого сумматора 5, на другие входы которого подают сигналы ошибок сопровождения по первой производной пеленга цели x2(mk+i), и т.д., по n-й производной пеленга цели xn(mk+i), предварительно усиленные соответственно во втором усилителе 6, и т.д., и (n+1)-м усилителе 7. Коэффициенты усиления второго усилителя 6, и т.д., (n+1)-го усилителя 7 рассчитаны заранее и заложены в память усилителей. Для примера k=5 значения сигналов ошибки сопровождения по первой производной пеленга цели будут x2(0), x2(1),x2(2),x2(3),x2(4), а переменные коэффициенты усиления второго усилителя 6 K21, K22, K23, K24, K25 устанавливаются по сигналам синхронизатора 4 в момент посылки соответствующего зондирующего импульса.
Аналогично в следующий период сканирования (m=1, i=1, 2, 3, 4) для формирования сигнала управления используют импульсные сигналы ошибки сопровождения по пеленгу e(5), e(6), e(1), e(8), e(9) и импульсные сигналы ошибок сопровождения по производным пеленга цели x2(5), x2(6), x2(7), x2(8), x2(9)…xn(5), xn(6), xn(7), xn(8), xn(9). Набор переменных коэффициентов усилителей 3, 6, 7 на следующем периоде сканирования сохраняется.
Таким образом, сигнал управления приводом 1 антенны формируют в виде суммы u(mk+i)=K1i+1·е((mk+i)+K2i+1·х2((mk+i)+…+Kni+1·xn((mk+i), в которой коэффициенты усиления меняют в дискретные моменты времени j=mk+i посылки зондирующих импульсов и периодически, через k-штук зондирующих импульсов. Синхронность сканирования и последовательности посылок зондирующих импульсов обеспечивается синхронизирующим импульсным сигналом между синхронизатором 4 и приводом 1 антенны.
В переходном процессе от момента захвата до слежения за целью сигнал ошибки сопровождения по пеленгу цели e(mk+i) снижается. Когда норма этого сигнала достигает некоторой определенной величины, зависящей от ширины диаграммы направленности (апертуры) антенны, в сигнал управления u(mk+i) приводом добавляется сигнал z(mk+i) с выхода цифрового интегратора 11 сигнала ошибки сопровождения по пеленгу цели. Тем самым порядок астатизма следящей системы повышается на единицу.
Подключение цифрового интегратора 11 осуществляется ключом 8, на один вход которого подается сигнал ошибки сопровождения по пеленгу цели e(mk+i), а на другой, управляющий, вход, подается сигнал со второго сумматора 9. Второй сумматор 9 подает сигнал на замыкание ключа 8, когда норма, например евклидова, сигнала ошибки сопровождения по пеленгу цели становится меньше некоторой заранее установленной величины d, например 5-10% от сигнала максимальной ошибки сопровождения по пеленгу цели. Максимальную ошибку углового сопровождения можно определить по ширине диаграммы направленности антенны как половину апертуры. В случае сопровождения цели двухканальным приводом по двум взаимно перпендикулярным координатам норма ошибки определятся корнем квадратным из суммы квадратов угловых ошибок по каждой из координат.
Для упрощения сигнал на выходе сумматора 9 формируется как разность d2-e2(mk+i). Когда разность становится больше нуля, подается сигнал на замыкание ключа 8. Квадрат сигнала ошибки сопровождения по пеленгу цели формируют при помощи умножителя 10.
Цифровое интегрирование сигнала ошибки e(mk+i) сопровождения по пеленгу цели производится в цифровом сумматоре 11, выходной сигнал которого в момент посылки j-го зондирующего импульса определяется выражением z(mk+i)=z(mk+i-1)+e(mk+i-1) или, с учетом обозначения j=mk+i, z(j)=z(j-l)+e(j-1). При следующем (j+1)-м зондирующем импульсе интеграл от сигнала ошибки сопровождения по пеленгу цели будет равен z(j+1)=z(j-1)+е(j-1)+e(j). При следующем (j+2)-м зондирующем импульсе интеграл от сигнала ошибки будет равен z(j+2)=z(j-1)+e(j-1)+e(j)+e(j+1) и так далее. Таким образом, происходит суммирование или накопление сигнала ошибки сопровождения по пеленгу цели по мере посылки зондирующих импульсов и формирования сигнала управления приводом 1 антенны. Начальное значение z(j-1)=z(mk+i-1) выхода сигнала выхода цифрового интегратора 11 может быть выбрано нулевым.
Цифровой интеграл z(mk+i) от сигнала ошибки усиливается в усилителе интегрального сигнала 12 с интегральным коэффициентом усиления Kui+1, который меняется синхронно с частотой посылок зондирующих импульсов, и периодично с периодом сканирования, что обеспечивается синхронизирующим сигналом с синхронизатора 4.
Способ хаотического обзора пространства в оптической локационной системе
Способ оперативной оценки спектральных характеристик чувствительности цифровых фотокамер
Способ хаотического обзора пространства в оптической локационной системе
Способ оперативной оценки спектральных характеристик чувствительности цифровых фотокамер
Способ оперативной точной оценки спектральных характеристик чувствительности цифровых фотокамер
Способ измерения интенсивности ультразвукового поля в жидкости

