Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области ракетной техники, а именно к системам ориентации космического аппарата.
Известен способ ориентации космического аппарата, заключающийся в измерении сигнала угла и сигнала угловой скорости, формировании сигнала задания и формировании сигнала управления космическим аппаратом.
Недостатком известного способа является низкая точность и надежность ориентации космического аппарата в случае отказа датчика угла и датчика угловой скорости вращения космического аппарата.
Известна система ориентации космического аппарата [1], содержащая последовательно соединенные первый сумматор, первый усилитель, второй сумматор, двигатель-маховик, третий сумматор, космический аппарат, датчик угловой скорости и датчик угла, а выход второго усилителя соединен с первым входом первого усилителя.
Низкая точность и надежность системы ориентации космического аппарата - недостаток известной системы.
С целью исключения указанных недостатков способ ориентации космического аппарата отличается тем, что формируют сигнал оценки угла и сигнал оценки угловой скорости вращения космического аппарата, формируют сигнал оценки управления, определяют сигнал разности сигнала угла и сигнала оценки угла, определяют сигнал разности сигнала угловой скорости и сигнала оценки угловой скорости, определяют сигнал разности сигнала управления и сигнала оценки управления и определяют скорректированный сигнал оценки угла, скорректированный сигнал оценки угловой скорости и сигнал оценки внешней помехи по формулам соответственно


где  - скорректированный сигнал оценки сигнала оценки угла
- скорректированный сигнал оценки сигнала оценки угла  - скорректированный сигнал оценки сигнала оценки угловой скорости
- скорректированный сигнал оценки сигнала оценки угловой скорости  - соответственно угол и угловая скорость, Km -коэффициент усиления двигателя-маховика, ΔU(t) - сигнал разности сигнала управления и сигнала оценки управления,
- соответственно угол и угловая скорость, Km -коэффициент усиления двигателя-маховика, ΔU(t) - сигнал разности сигнала управления и сигнала оценки управления,
и формируют сигнал управления с использованием скорректированного сигнала оценки угла, скорректированного сигнала оценки угловой скорости и сигнала оценки внешней помехи.
Устройство для реализации способа ориентации космического аппарата отличается тем, что оно содержит пять нормально замкнутых переключателей, два нормально разомкнутых переключателя, семь сумматоров, модель двигателя-маховика, два усилителя, пять интеграторов, выход четвертого сумматора через последовательно соединенные усилитель, пятый сумматор, шестой сумматор, модель двигателя-маховика, первый интегратор, седьмой сумматор, второй интегратор, восьмой сумматор, девятый сумматор, первый нормально замкнутый переключатель и третий интегратор соединен со вторым входом восьмого сумматора, выход которого соединен с первым входом четвертого сумматора, а через первый нормально разомкнутый переключатель - с первым входом первого сумматора, выход седьмого сумматора через четвертый усилитель соединен со вторым входом пятого сумматора, через второй нормально разомкнутый переключатель - со входом второго усилителя и через последовательно соединенные десятый сумматор, второй нормально замкнутый переключатель и четвертый интегратор - со вторым входом седьмого сумматора, выход шестого сумматора через последовательно соединенные одиннадцатый сумматор, третий нормально замкнутый переключатель и пятый интегратор соединен со вторым входом шестого сумматора, выход датчика угла соединен со вторым входом девятого сумматора и через четвертый нормально замкнутый переключатель - со вторым входом первого сумматора, выход датчика угловой скорости соединен со вторым входом десятого сумматора, а через пятый нормально замкнутый переключатель - со входом второго усилителя, выход второго сумматора подключен ко второму входу одиннадцатого сумматора, второй вход четвертого сумматора соединен с третьим входом первого сумматора.
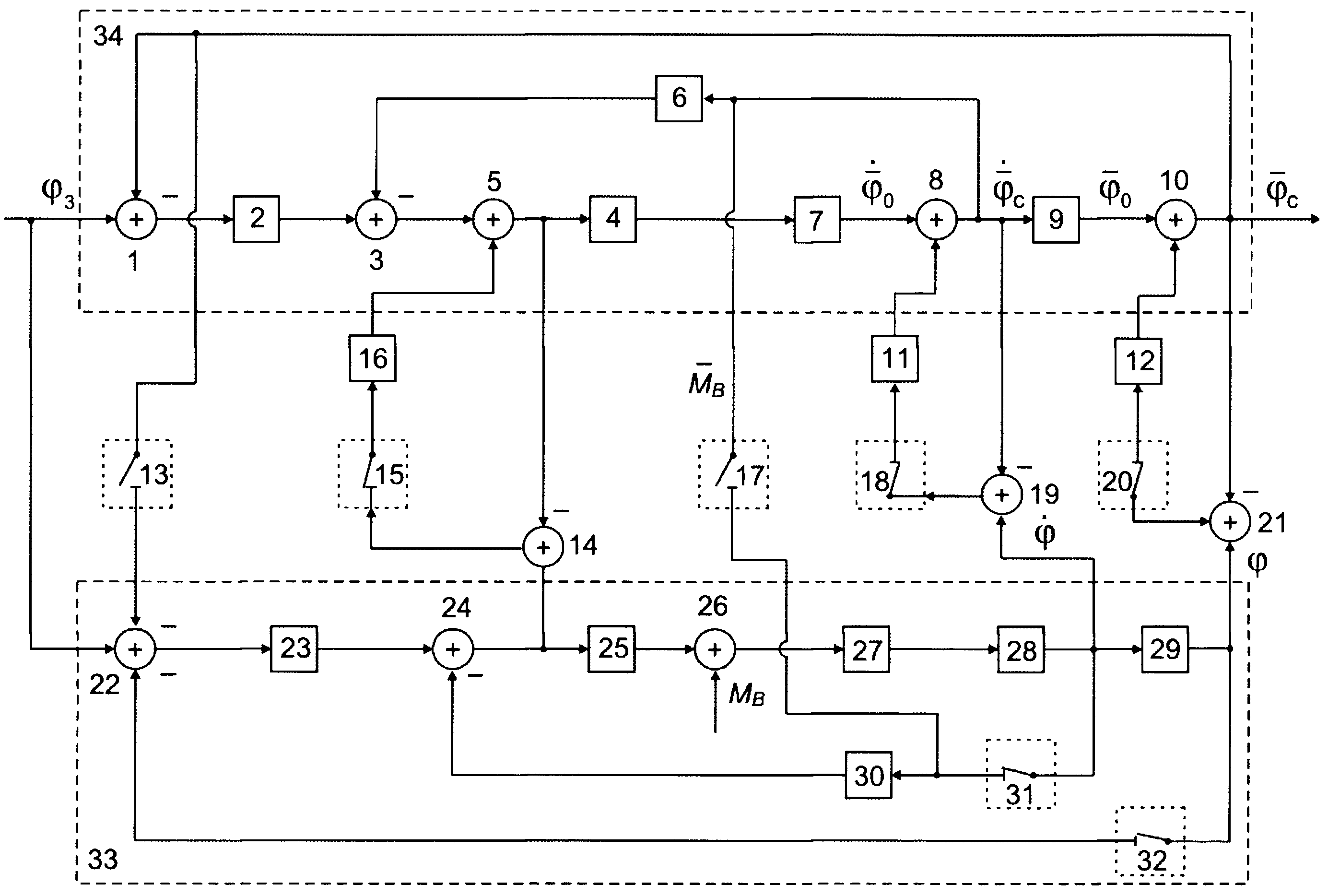
Функционирование устройства ориентации космического аппарата, реализующего предложенный способ, представлено на чертеже.
На чертеже приняты следующие обозначения:
1 - четвертый сумматор,
2 - третий усилитель,
3 - пятый сумматор,
4 - модель двигателя-маховика,
5 - шестой сумматор,
6 - четвертый усилитель,
7 - первый интегратор,
8 - седьмой сумматор,
9 - второй интегратор,
10 - восьмой сумматор,
11 - четвертый интегратор,
12 - третий интегратор,
13 - первый нормально разомкнутый переключатель,
14 - одиннадцатый сумматор,
15 - третий нормально замкнутый переключатель,
16 - пятый интегратор,
17 - второй нормально разомкнутый переключатель,
18 - второй нормально замкнутый переключатель,
19 - десятый сумматор,
20 - первый нормально замкнутый переключатель,
21 - девятый сумматор,
22 - первый сумматор,
23 - первый усилитель,
24 - второй сумматор,
25 - двигатель-маховик,
26 - третий сумматор,
27 - космический аппарат,
28 - датчик угловой скорости,
29 - датчик угла,
30 - второй усилитель,
31 - пятый нормально замкнутый переключатель,
32 - четвертый нормально замкнутый переключатель,
33 - основной контур ориентации (ОКО),
34 - модель ОКО.
Функционирует устройство для реализации способа ориентации следующим образом.
На входы первого сумматора 22 и четвертого сумматора 1 поступает сигнал задания φ3 угла ориентации.
Считаем, что в начале функционирования устройства датчики угла 29 и угловой скорости 28 исправны.
Основной контур ориентации 33 состоит в этом случае из последовательно соединенных первого сумматора 22, первого усилителя 23, второго сумматора 24, двигателя-маховика 25, третьего сумматора 26, космического аппарата 27, датчика угловой скорости 28 и датчика угла 29. Выход датчика угла 29 через четвертый нормально замкнутый переключатель 32 соединен со входом первого сумматора 22, а выход датчика угловой скорости 28 через последовательно соединенные пятый нормально замкнутый переключатель и второй усилитель соединен со входом второго сумматора 24.
В это же время функционирует параллельно и математическая модель основного контура управления. В математическую модель 34 основного контура управления входят четвертый сумматор 1, третий усилитель 2, пятый сумматор 3, модель двигателя-маховика 4, шестой сумматор 5, первый интегратор 7, седьмой сумматор 8, второй интегратор 9, восьмой сумматор 10 и четвертый усилитель 6.
Как видно из чертежа, на вход космического аппарата поступает внешняя помеха Мв, которая приводит к дополнительному повороту космического аппарата. В результате управление U(t) на выходе второго сумматора 24 будет отличаться от оценки управления Ū(t) на выходе пятого сумматора 3 математической модели 34, т.к. помеха Мв на математическую модель 34 не действует. Кроме того, момент инерции J(t) космического аппарата меняется во времени и точно его установить в математической модели 34 не удается. Указанные обстоятельства приведут к тому, что начальные оценки угловой скорости  на выходе первого интегратора 7 и начальная оценка угла
на выходе первого интегратора 7 и начальная оценка угла
 на выходе второго интегратора 9 будут далеки от точно измеренных
на выходе второго интегратора 9 будут далеки от точно измеренных  - датчиком угловой скорости 28 и φ - датчиком угла 29.
- датчиком угловой скорости 28 и φ - датчиком угла 29.
Управление U(t) в основном контуре ориентации 33 на выходе второго сумматора 24 будет отличаться от управления Um(t) в модели 34 ОКО, т.к. управление U (t) будет сформировано для компенсации действия внешней помехи Мв и вариации параметра J(t) - момента инерции космического аппарата.
Очевидно, что для обеспечения идентичности работы ОКО 33 и модели ОКО 34 необходимо оценить внешнюю помеху  и подать ее на вход шестого сумматора 5 подобно действию внешней помехи Мв на входе третьего сумматора 26 и скорректировать значения
и подать ее на вход шестого сумматора 5 подобно действию внешней помехи Мв на входе третьего сумматора 26 и скорректировать значения  и
и  .
.
С этой целью определим ΔU(t)=U(t) - Um(t), тогда можно оценить Мв в виде

Для того чтобы обеспечить равенство

на выходе девятого сумматора 21 определяется разность сигналов  и
и  и через последовательно соединенные первый нормально замкнутый переключатель 20 и третий интегратор 12 подается в качестве сигнала смещения на второй вход восьмого сумматора 10.
и через последовательно соединенные первый нормально замкнутый переключатель 20 и третий интегратор 12 подается в качестве сигнала смещения на второй вход восьмого сумматора 10.
Аналогично поддерживается равенство

с помощью соединения десятого сумматора 19, второго нормально замкнутого переключателя 18 и четвертого интегратора 11.
В результате получается, что выполняются равенства (1), (2) и (3). Другими словами, модель ОКО 34 функционирует идентично ОКО 33.
С этого момента модель ОКО можно использовать в качестве датчика угла 29 и датчика угловой скорости 28. Для этого достаточно одновременно переключатели 13 и 17 перевести в замкнутое состояние, а переключатели 15, 18, 20, 31 и 32 в разомкнутое состояние.
Далее по истечении некоторого времени в результате изменения MB(t) и J(t) требуется вернуть устройство реализации способа ориентации космическим аппаратом в первоначальное состояние и получить новые значения выходов пятого интегратора 16, четвертого интегратора 11 и третьего интегратора 12, которые соответствуют новым значениям U(t), Мв(t) и J(t) в ОКО 33.
Использование в качестве измерителя φ(t) и  модели ОКО 34 позволит достичь технического результата, который заключается в повышении надежности устройства и точности его функционирования.
модели ОКО 34 позволит достичь технического результата, который заключается в повышении надежности устройства и точности его функционирования.
Изобретательский уровень предложенного технического решения подтверждается отличительными частями формулы изобретения по пп.1 и 2.
Литература
1. Системы ориентации космических аппаратов/ В.Н. Васильев. - М.: ФГУП «НЛП ВНИИЭМ», 2009.



Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ формирования сигнала управления газогидравлическим рулевым приводом и устройство для его реализации
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ формирования сигнала управления газогидравлическим рулевым приводом и устройство для его реализации

