Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ
Вид РИД
Изобретение
Изобретение относится к ракетной технике и предназначено для использования в системах наведения управляемых ракет.
Известен способ формирования сигналов управления вращающейся вокруг продольной оси двухканальной ракетой (Н.Т.Кузовков. Системы стабилизации летательных аппаратов. - М.: Высшая школа, 1976, стр.236-238), включающий формирование команд управления ракетой в каналах курса и тангажа, пропорциональных линейным отклонениям ракеты относительно линии наведения соответственно в горизонтальной и вертикальной плоскостях наведения, формирование периодических по углу крена ракеты сигналов несущей частоты, пропорциональных синусу и косинусу текущего угла крена ракеты, формирование сигналов управления рулевыми приводами в каналах курса и тангажа путем амплитудной модуляции сигналов несущей частоты соответственно командами управления ракетой в каналах курса и тангажа и последующего их суммирования в соответствии с соотношениями
где Upz, Upy - сигналы управления рулевыми приводами в каналах курса и тангажа соответственно;
Uz, Uy - команды управления ракетой в каналах курса и тангажа, пропорциональные линейным отклонениям ракеты относительно линии наведения соответственно в горизонтальной и вертикальной плоскостях наведения;
γ - текущий угол крена ракеты.
Недостатком известного способа формирования сигналов управления вращающейся по крену ракетой является возникновение фазовой связи (расфазировки) между каналами управления ракетой, обусловленной инерционностью рулевых приводов ракеты. Это приводит к тому, что вектор управляющего воздействия на ракету и вектор отклонения ракеты от линии наведения будут развернуты относительно друг друга на угол, равный фазовому запаздыванию сигналов управления в рулевых приводах на частоте вращения ракеты по крену. Наличие расфазировки каналов управления увеличивает время переходного процесса вывода ракеты на линию наведения, снижает устойчивость и точность системы управления и может привести к срыву наведения ракеты.
Наиболее близким к предлагаемому является способ формирования сигналов управления вращающейся вокруг продольной оси двухканальной ракетой (патент РФ №2282816), включающий формирование команд управления ракетой в каналах курса и тангажа, пропорциональных линейным отклонениям ракеты относительно линии наведения соответственно в горизонтальной и вертикальной плоскостях наведения, формирование периодических сигналов несущей частоты, пропорциональных синусу и косинусу текущего угла крена ракеты, формирование сигналов, пропорциональных углам отклонения рулей рулевыми приводами ракеты в каналах курса и тангажа, демодуляцию этих сигналов путем умножения на сигналы несущей частоты с последующим соответствующим их суммированием, формирование сигналов рассогласования между командами управления ракетой в каналах курса и тангажа, пропорциональными соответствующим линейным отклонениям ракеты относительно линии наведения, и соответствующими демодулированными сигналами, пропорциональными углам отклонения рулей рулевыми приводами ракеты в каналах курса и тангажа, в соответствии с соотношениями

где UΣz, UΣy - сигналы рассогласования между соответствующими командами управления ракетой и демодулированными сигналами, пропорциональными углам отклонения рулей в каналах курса и тангажа соответственно;
ky - коэффициент усиления;
Uδz, Uδγ - сигналы, пропорциональные углам отклонения рулей ракеты в каналах курса и тангажа соответственно,
и формирование сигналов управления Upz, Upy рулевыми приводами в каналах курса и тангажа путем амплитудной модуляции сигналов несущей частоты полученными соответствующими сигналами рассогласования в каналах курса и тангажа с последующим их соответствующим суммированием в соответствии с соотношениями
Известный способ формирования сигналов управления вращающейся по крену ракетой при определенных обстоятельствах, а именно в установившемся режиме, при достаточно большом значении коэффициента усиления kу в цепи рассогласования (2) и при относительно большом, по сравнению с моментом шарнирной нагрузки на рули, развиваемом моменте рулевого привода, позволяет устранить фазовую связь каналов управления, вызванную инерционностью рулевых приводов. Однако на практике задание требуемого большого значения коэффициента усиления ky не всегда возможно, так как его величина ограничивается необходимостью обеспечения запасов устойчивости контура регулирования, образованного отрицательной обратной связью по демодулированному сигналу, пропорциональному углу отклонения рулей, охватывающей рулевой привод ракеты в каждом канале управления. В то же время эти контуры регулирования входных сигналов рулевых приводов по выходным координатам (углам отклонения рулей) по отношению к входным сигналам меняющихся команд управления ракетой как динамические системы являются статическими системами, т.е. имеют статические ошибки отработки входных команд управления ракетой. При командах управления ракетой, требующих реализации всей располагаемой перегрузки ракеты, что особенно характерно при перехвате цели в граничных точках зоны поражения, когда рули ракеты отклоняются на предельные максимальные углы, величины сигналов рассогласования между командами управления ракетой и соответствующими демодулированными сигналами, пропорциональными углам отклонения рулей, могут превысить линейную зону трактов рулевых приводов. В таком случае коэффициент передачи рулевых приводов будет падать и точность отработки ими команд управления ракетой и, соответственно, точность фазирования и точность наведения ракеты снизятся. Далее, в управляемом полете ракеты угловые отклонения рулей определяются не только управляющими сигналами рулевых приводов, но также и аэродинамической шарнирной нагрузкой, действующей на рули (А.А.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: "Машиностроение", 1965, стр.164-166, 179-183). Шарнирная нагрузка на рулях определяется эффективным углом атаки и может изменяться как по величине, так и по знаку (от нагрузки пружинной (стабилизирующей) до нагрузки перекомпенсации (опрокидывающей) и наоборот), что особенно характерно для скоростных ракет. В связи с тем что мощность и развиваемый момент рулевого привода всегда ограниченны, точность фазирования каналов управления при таком способе будет также существенно зависеть от углов атаки ракеты (т.е. от шарнирной нагрузки на рулях), особенно в переходных процессах. Поэтому известный способ при широком диапазоне изменения условий наведения ракеты не обеспечивает требуемую точность фазирования каналов управления ракеты.
Задачей настоящего изобретения является повышение точности наведения ракеты за счет устранения, в том числе и в переходных процессах, фазовой связи каналов управления ракетой, вызванной инерционностью ее рулевых приводов.
Поставленная задача решается тем, что в способе формирования сигналов управления вращающейся вокруг продольной оси двухканальной ракетой, включающем формирование команд управления ракетой в каналах курса и тангажа, пропорциональных линейным отклонениям ракеты относительно линии наведения соответственно в горизонтальной и вертикальной плоскостях наведения, формирование периодических сигналов несущей частоты, пропорциональных синусу и косинусу текущего угла крена ракеты, формирование сигналов, пропорциональных углам отклонения рулей рулевыми приводами ракеты в каналах курса и тангажа, демодуляцию этих сигналов путем умножения на сигналы несущей частоты с последующим соответствующим их суммированием, формирование сигналов рассогласования между командами управления ракетой в каналах курса и тангажа, пропорциональными соответствующим линейным отклонениям ракеты относительно линии наведения, и соответствующими демодулированными сигналами, пропорциональными углам отклонения рулей рулевыми приводами ракеты в каналах курса и тангажа, и формирование сигналов управления рулевыми приводами в каналах курса и тангажа путем амплитудной модуляции сигналов несущей частоты сигналами управления в каналах курса и тангажа с последующим их соответствующим суммированием, новым является то, что сигналы рассогласования между командами управления ракетой в каналах курса и тангажа, пропорциональными линейным отклонениям ракеты относительно линии наведения, и соответствующими демодулированными сигналами, пропорциональными углам отклонения рулей рулевыми приводами, в каждом канале управления усиливают, интегрируют, ограничивают по уровню и полученными сигналами осуществляют амплитудную модуляцию сигналов несущей частоты при формировании сигналов управления рулевыми приводами соответственно в каналах курса и тангажа, а также измеряют угловые скорости движения ракеты относительно ее поперечных осей в соответствующих плоскостях, формируют в каналах курса и тангажа корректирующие сигналы, пропорциональные угловым скоростям движения ракеты относительно соответствующих ее поперечных осей, и организуют по этим сигналам цепи отрицательной обратной связи, охватывающие в каждом канале управления динамические звенья, предназначенные для формирования сигналов управления ракетой соответственно в каналах курса и тангажа.
В предлагаемом способе формирования сигналов управления вращающейся вокруг продольной оси двухканальной ракетой корректирующие сигналы в каналах курса и тангажа, пропорциональные угловым скоростям движения ракеты относительно ее соответствующих поперечных осей, формируют по соотношениям

где U1yk, U1zk - корректирующие сигналы в каналах курса и тангажа соответственно;
k1ДУС - коэффициент усиления, значение которого выбирают из условия обеспечения необходимых запасов устойчивости по амплитуде и фазе замкнутых контуров демпфирования, образованных рулевым приводом, планером ракеты и датчиком угловой скорости ракеты, в каналах курса и тангажа;
Uωy, Uωz - сигналы, пропорциональные угловым скоростям движения ракеты относительно соответствующих поперечных осей;
Δ - программное значение фазового запаздывания рулевого привода на номинальной частоте вращения ракеты по крену, а цепи отрицательной обратной связи по корректирующим сигналам в каждом канале управления организуют по отношению к соответствующим сигналам управления рулевыми приводами в каналах курса и тангажа.
В предлагаемом способе формирования сигналов управления вращающейся вокруг продольной оси двухканальной ракетой корректирующие сигналы в каналах курса и тангажа, пропорциональные угловым скоростям движения ракеты относительно ее соответствующих поперечных осей, формируют демодуляцией сигналов, пропорциональных угловым скоростям движения ракеты относительно ее соответствующих поперечных осей, путем умножения их на сигналы несущей частоты с последующим соответствующим суммированием и далее преобразованием полученных демодулированных сигналов в каждом канале управления дифференцирующим фильтром нижних частот, а цепи отрицательной обратной связи по корректирующим сигналам в каждом канале управления организуют по отношению к соответствующим командам управления ракетой в каналах курса и тангажа.
В предлагаемом способе формирования сигналов управления вращающейся вокруг продольной оси двухканальной ракетой сигналы рассогласования между командами управления ракетой в каналах курса и тангажа, пропорциональными линейным отклонениям ракеты относительно линии наведения, и соответствующими демодулированными сигналами, пропорциональными углам отклонения рулей рулевыми приводами, в каждом канале управления после усиления и интегрирования ограничивают по уровню, пропорциональному значению максимального угла отклонения рулей рулевым приводом.
Введенная в способе формирования сигналов управления ракетой операция интегрирования сигналов рассогласования (2) между командами управления ракетой, пропорциональными линейным отклонениям ракеты относительно линии наведения, и соответствующими демодулированными сигналами, пропорциональными углам отклонения рулей рулевыми приводами, т.е. преобразование сигналов рассогласования посредством интегрального управления, делает контуры регулирования входных сигналов рулевых приводов по выходным координатам (углам отклонения рулей) по отношению к входным сигналам команд управления ракетой астатическими системами управления. В таких системах за счет формирования управляющего воздействия, пропорционального интегралу от сигнала рассогласования, устраняется вынужденная ошибка системы регулирования входного сигнала рулевого привода, т.е. обеспечивается повышение точности фазирования каналов управления. Введенное интегральное управление реализуется включением в цепь сигнала рассогласования интегратора, описываемого передаточной функцией вида (Я.З.Цыпкин. Основы теории автоматических систем. - М: Наука, 1977, стр.103, стр.125-126).
где p - комплексная переменная преобразования Лапласа;
КИ - коэффициент усиления.
Значение коэффициента усиления КИ в соотношении (5) выбирают таким, чтобы обеспечить достаточные запасы устойчивости замкнутых отрицательной обратной связью по соответствующему демодулированному сигналу, пропорциональному углу отклонения рулей, контуров регулирования (фазирования) входных сигналов рулевых приводов в каждом канале управления.
Последующее ограничение сигналов управления, пропорциональных интегралу от соответствующих рассогласований, перед формированием сигналов управления рулевыми приводами обеспечивает функционирование рулевых приводов в линейной зоне отработки входных сигналов (без насыщения рулевых трактов), что приводит к минимальным амплитудным и фазовым искажениям сигналов управления в рулевых приводах, т.е., таким образом, повышается точность отработки команд управления ракетой и, соответственно, точность фазирования каналов управления. Указанное ограничение сигналов в каждом канале управления осуществляют в соответствии с соотношением

где UΣO - выходной сигнал после ограничения;
UИ - входной сигнал до ограничения;
Uδmax - сигнал, соответствующий максимальному углу отклонения руля рулевым приводом;
kδ - коэффициент пропорциональности, величина которого устанавливается из диапазона значений коэффициента передачи рулевого привода по первой гармонике при отработке входного сигнала, превышающего уровень, соответствующий максимальному углу отклонения руля. Величина коэффициента kδ лежит в диапазоне 1-1.41.
Далее формируют сигналы управления рулевыми приводами в каналах курса и тангажа путем амплитудной модуляции сигналов несущей частоты полученными сигналами управления (т.е. сигналами рассогласования после интегрирования и ограничения) в соответствии с соотношениями

где Upzε, Uруε - соответственно сигналы управления рулевыми приводами в каналах курса и тангажа, пропорциональные сигналам рассогласования между командами управления ракетой, пропорциональными линейным отклонениям ракеты относительно линии наведения, и соответствующими демодулированными сигналами, пропорциональными углам отклонения рулей, с учетом их интегрирования и ограничения.
В предлагаемом способе также измеряют текущие угловые скорости движения ракеты относительно ее поперечных (связанных) осей в соответствующих плоскостях (например, с помощью датчиков угловых скоростей) и формируют в каналах курса и тангажа корректирующие сигналы, пропорциональные этим угловым скоростям, которые посредством организованных цепей отрицательной обратной связи учитываются при формировании управляющих сигналов ракетой. Замыкание обратной связи по угловой скорости корпуса ракеты приводит к повышению демпфирования ракеты (снижению колебательности корпуса ракеты), снижению колебательной составляющей углов атаки, снижению шарнирной нагрузки на рули (особенно в переходных процессах), уменьшению углов отклонения рулей, обусловленных влиянием шарнирного момента, и, соответственно, к повышению точности фазирования каналов управления ракетой.
В первом варианте способа организации обратной связи корректирующие сигналы, пропорциональные угловым скоростям ракеты относительно ее продольных осей, формируют в соответствии с соотношениями (4), а цепи отрицательной обратной связи по соответствующим корректирующим сигналам в каждом канале управления замыкают по отношению к сформированным сигналам управления Upzε, Upyε вида (7) рулевыми приводами, т.е. входные сигналы управления (7) рулевыми приводами в каналах курса и тангажа корректируют в соответствии с соотношениями

Формирование сигналов управления в соответствии с соотношениями (4) обеспечивает компенсацию начального фазового запаздывания сигналов, пропорциональных угловым скоростям ракеты относительно ее продольных осей, при дальнейшей отработке их рулевыми приводами, т.е., таким образом, осуществляют упреждение этих сигналов на угол Δ, равный ожидаемому номинальному (среднему) фазовому запаздыванию их в рулевых приводах. Программное значение угла фазового запаздывания Δ определяется заранее расчетным или опытным путем для номинальной (средней) частоты вращения ракеты по крену при номинальных параметрах рулевого привода и усредненных условиях применения ракеты.
Значение коэффициента усиления k1ДУС выбирают из условия обеспечения необходимых запасов устойчивости по амплитуде и фазе замкнутого обратной связью контура демпфирования, включающего рулевой привод, планер ракеты и датчик угловой скорости ракеты относительно соответствующей продольной ее оси.
Во втором варианте способа организации обратной связи корректирующие сигналы, пропорциональные соответствующим угловым скоростям ракеты относительно продольных осей, формируют следующим образом:
- проводят демодуляцию сигналов, пропорциональных измеренным угловым скоростям движения ракеты относительно ее соответствующих поперечных осей, путем умножения их на сигналы несущей частоты с последующим соответствующим суммированием по соотношениям
- преобразуют в каждом канале управления полученные демодулированные сигналы вида (9) дифференцирующим фильтром нижних частот с последующим усилением в соответствии с соотношениями

где U2yk, U2zk - корректирующие сигналы в каналах курса и тангажа соответственно;
k2ДУС - коэффициент усиления;
WДФ(p) - передаточная функция дифференцирующего фильтра нижних частот вида WДФ(p)=(1+Tlр)/(1+T2), здесь T1, T2 - постоянные времени, Т1>Т2,
а цепи отрицательной обратной связи по корректирующим сигналам (10) в каждом канале управления замыкают соответственно по отношению к командам управления ракетой Uz, Uy в каналах курса и тангажа, т.е. в этом случае сигналы рассогласования между командами управления ракетой в каналах курса и тангажа, пропорциональными соответствующим линейным отклонениям ракеты относительно линии наведения, и соответствующими демодулированными сигналами, пропорциональными углам отклонения рулей ракеты в каналах курса и тангажа, формируют с учетом корректирующих сигналов (10) в соответствии с соотношениями

Преобразование сигналов, пропорциональных угловым скоростям рыскания и тангажа ракеты, полученных по соотношениям (9), дифференцирующими фильтрами в соответствии с соотношениями (10) обеспечивает требуемые быстродействие и устойчивость замкнутых контуров демпфирования, включающих в каждом канале интегратор, рулевой привод, планер ракеты и датчик угловой скорости ракеты. Значения коэффициента усиления k2ДУС и постоянных времени фильтра T1, Т2 выбирают из условия обеспечения необходимых запасов устойчивости по амплитуде и фазе указанных контуров демпфирования.
Таким образом, введение в способ формирования сигналов управления ракетой новых операций и связей обеспечивает демпфирование собственных колебаний ракеты, повышение точности формирования сигналов управления ракетой, устранения фазовой связи каналов управления ракетой, вызванной инерционностью ее рулевых приводов, и, соответственно, повышение точности наведения ракеты.
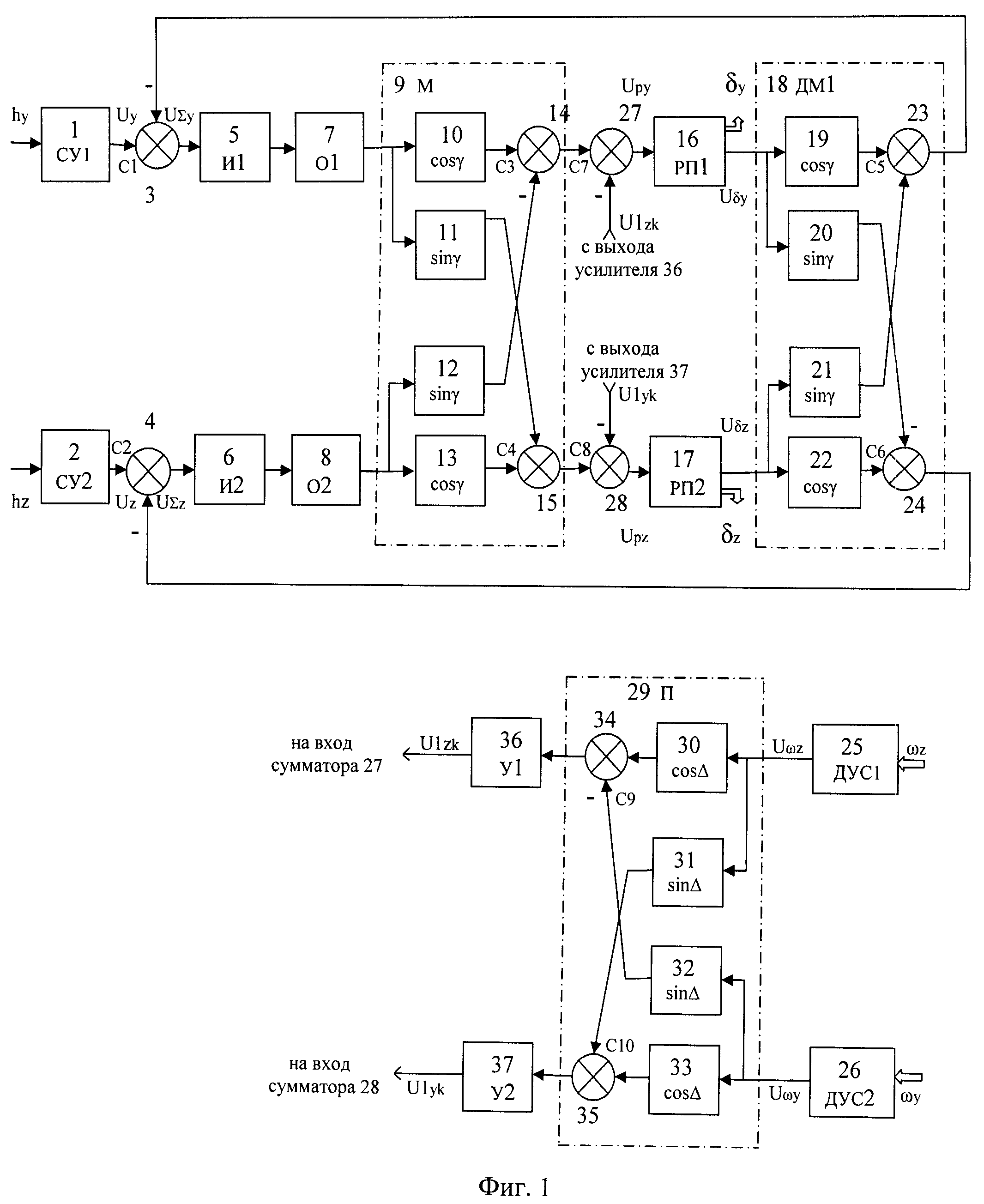
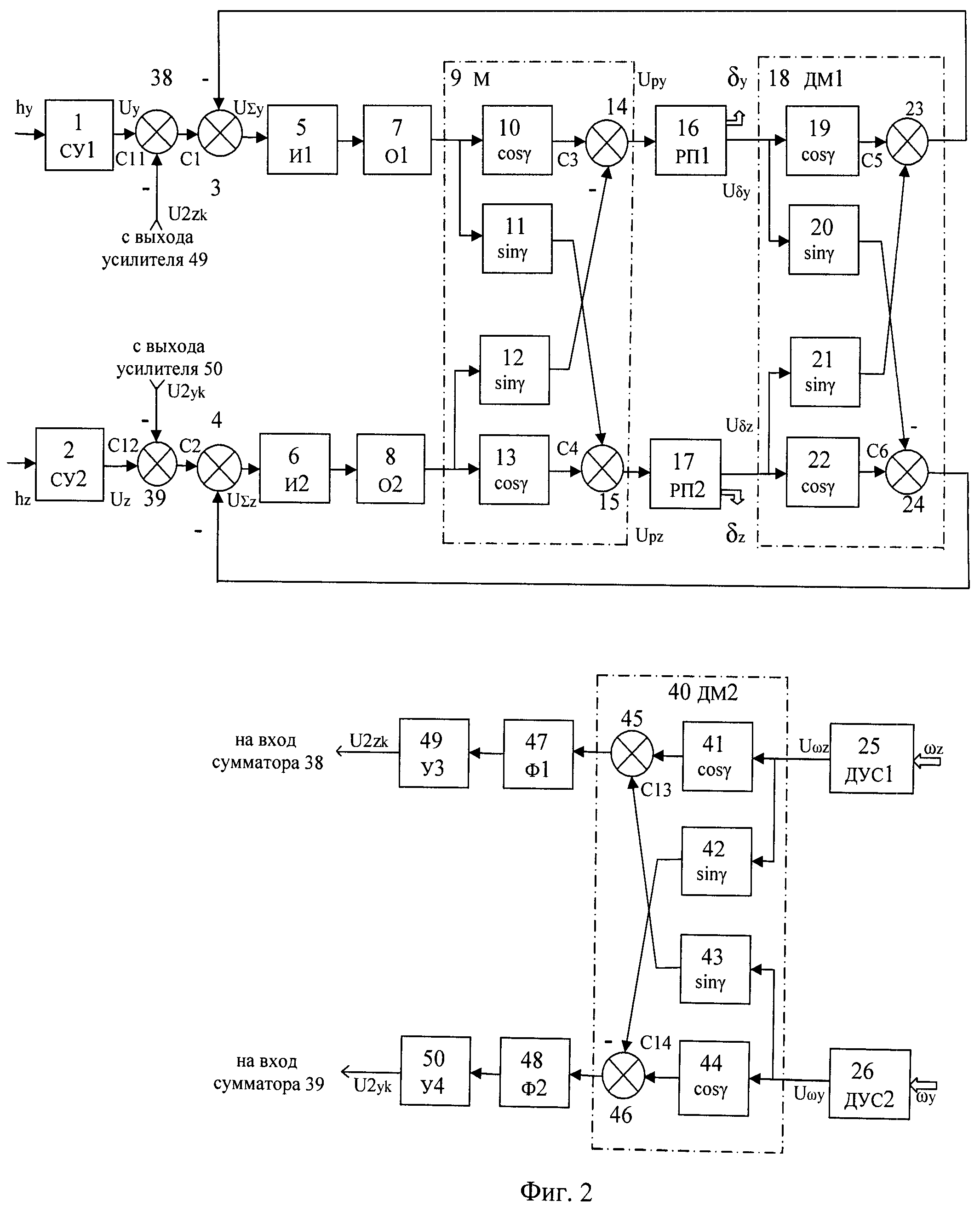
Предлагаемый способ и его реализация поясняются схемами, представленными на фиг.1 для первого варианта организации корректирующей обратной связи и на фиг.2 для второго варианта организации корректирующей обратной связи. На фиг.1 и 2 обозначено:
hz, hy - линейные отклонения ракеты относительно линии наведения соответственно в горизонтальной и вертикальной плоскостях наведения;
Uz, Uy - команды управления ракетой в каналах курса и тангажа, пропорциональные соответствующим линейным отклонениям ракеты относительно линии наведения;
UΣz, UΣy - сигналы рассогласования между соответствующими командами управления ракетой и демодулированными сигналами, пропорциональными углам отклонения рулей в каналах курса и тангажа соответственно;
Upz, Upy - сигналы управления рулевыми приводами соответственно в каналах курса и тангажа;
δz, δy - углы отклонения рулей ракеты соответственно в каналах курса и тангажа;
Uδz, Uδy - сигналы, пропорциональные углам отклонения рулей ракеты соответственно в каналах курса и тангажа;
ωy, ωz - угловые скорости ракеты относительно ее связанных поперечных осей;
Uωу, Uωz - сигналы, пропорциональные угловым скоростям ракеты относительно ее соответствующих поперечных осей;
U1yk, U1zk - корректирующие сигналы в каналах курса и тангажа, пропорциональные соответствующим угловым скоростям движения ракеты относительно соответствующих ее поперечных осей (в первом варианте организации обратной связи);
U2yk, U2zk - корректирующие сигналы в каналах курса и тангажа, пропорциональные соответствующим угловым скоростям движения ракеты относительно соответствующих ее поперечных осей (во втором варианте организации обратной связи);
1, 2 - устройства формирования команд управления ракетой в каналах курса и тангажа, пропорциональные соответствующим линейным отклонениям ракеты (СУ1, СУ2);
5, 6 - интеграторы с коэффициентами усиления (И1, И2);
7, 8 - ограничители сигналов по уровню (O1, O2);
9 - устройство модуляции сигналов (М), включающее блоки модуляторов 10, 11, 12, 13 и сумматоры 14, 15;
16, 17 - рулевые приводы (РП1, РП2);
18, 40 - устройства демодуляции сигналов (ДМ1, ДМ2), включающие блоки модуляторов 19, 20, 21, 22, 41, 42, 43, 44 и сумматоры 23, 24, 45, 46 соответственно;
25, 26 - датчики угловых скоростей ракеты относительно ее соответствующих поперечных осей (ДУС1, ДУС2);
29 - устройство преобразования сигналов (П), включающее блоки коэффициентов 30, 31, 32, 33 и сумматоры 34, 35;
36, 37, 49, 50 - усилители сигналов (У1, У2, У3, У4);
47, 48 - дифференцирующие фильтры (Ф1, Ф2);
3, 4, 27, 28, 38, 30 - сумматоры (С1, С2, С7, С8, С11, С12).
Корректирующие сигналы в каналах курса и тангажа, пропорциональные соответствующим угловым скоростям движения ракеты относительно ее поперечных осей, в первом варианте организации обратной связи поступают соответственно с выходов усилителей 36 и 37 на соответствующие входы сумматоров 27 и 28 (сигналы U1yk, U1zk), во втором варианте организации обратной связи - соответственно с выходов усилителей 49 и 50 на соответствующие входы сумматоров 38 и 39 (сигналы U2yk, U2zk).
Способ формирования сигналов управления реализуется известными устройствами (патент РФ №2282816). Введенные элементы - ДУС 11 и 12 являются штатными устройствами систем управления ракет, интеграторы 3 и 4, ограничители 5 и 6, дифференцирующие фильтры 17 и 18 и усилители 14, 15, 19 и 20 могут быть выполнены, например, на базе операционных усилителей (И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987).
Таким образом, предлагаемое техническое решение обеспечивает устранение фазовой связи каналов управления ракетой, вызванной инерционностью ее рулевых приводов, и повышение точности наведения ракеты, что выгодно отличает его от известных.


Вакуумный стенд для огневых испытаний жидкостного ракетного двигателя космического назначения
Способ оценки параметров траектории объекта
Способ вывода ракеты в зону захвата цели головкой самонаведения и устройство для его осуществления
Способ наведения телеуправляемой ракеты
Способ прямого наведения вооружения на движущуюся цель
Способ телеуправления ракетой
Способ прямого наведения вооружения на цель (варианты) и устройство ориентирования пусковой установки вооружения
Способ ориентирования орудия
Способ запуска двухступенчатой управляемой ракеты с воздушного носителя
Способ телеуправления ракетой
Боевое отделение
Пистолетный бронебойный патрон
Способ управления ракетой и система наведения ракеты
Способ наведения управляемой ракеты и система наведения для его реализации
Броневая башня с защитными элементами
Способ формирования команд управления на ракете, вращающейся по углу крена, система управления ракетой, способ преобразования импульсов на ракете, вращающейся по углу крена, и синус-косинусный преобразователь системы управления ракетой
Способ наведения ракеты и оптико-электронная командная система наведения
Система наведения высокоточного оружия дальней зоны

