Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА С ЗАЩИТОЙ ОТ КРАТКОВРЕМЕННЫХ СБОЕВ ИНФОРМАЦИИ ОБ УГЛОВОМ ПОЛОЖЕНИИ СОЛНЕЧНОЙ БАТАРЕИ
Вид РИД
Изобретение
Предлагаемый способ управления ориентацией солнечной батареи (СБ) космического аппарата (КА) с защитой от кратковременных сбоев информации об угловом положении солнечной батареи относится к системам электроснабжения КА и может быть применен при управлении ориентацией солнечных батарей спутников, космических станций и других типов КА.
Большинство современных КА могут функционировать на орбите Земли в течение нескольких лет. Для функционирования бортового оборудования КА в течение всего времени эксплуатации требуется обеспечивать его электроэнергией, которая, как правило, вырабатывается при помощи панелей солнечных батарей, с установленными на ней элементами, преобразующими излучение Солнца в электрический ток. Величина тока, вырабатываемого СБ, зависит от ориентации плоскости рабочей поверхности СБ относительно Солнца. Для автоматической ориентации СБ используют системы управления КА, в состав которых входят бортовые вычислительные машины, в которых, в свою очередь, реализуются алгоритмы управления бортовым оборудованием КА, в том числе управление ориентацией СБ. Система управления КА осуществляет управление устройством поворота СБ, состоящего из электронных блоков и электромеханического привода с жестко закрепленным на его выходном валу панелью СБ и датчиком угла. Электронные блоки устройства поворота СБ осуществляют прием, преобразование команд, формируемых из системы управления КА, в необходимую для управления электромеханическим приводом СБ форму, а также преобразование информации от датчика угла в форму, необходимую для передачи в систему управления КА.
При помощи алгоритмов системы управления движением, реализованных в системе управления КА, на основе информации, получаемой от соответствующих датчиков (например, астродатчиков или солнечных датчиков), определяют направление на Солнце и формируют заданный угол поворота СБ.
Алгоритмы управления ориентацией СБ принимают информацию о заданном угловом положении СБ, а также информацию о текущем угловом положении СБ с закрепленной на нем панелью СБ.
Как правило, панель СБ крепится на выходном валу электромеханического привода СБ таким образом, чтобы датчик угла формировал нулевое значение при положении нормали к рабочей поверхности СБ, совпадающей с одной из связанных с КА осей координат, например с осью рыскания, а ось вращения СБ - параллельна другой, например оси тангажа.
При достижении угла рассогласования между заданным углом и угловым положением СБ равному порогу срабатывания алгоритмы управления СБ инициируют выдачу команд на вращение СБ для уменьшения угла рассогласования, которые передаются из бортовой автоматической системы управления в устройство поворота СБ. При достижении угла рассогласования равном углу отпускания алгоритмы управления СБ инициируют команды на прекращение вращения СБ. Измерение углового положения СБ, как правило, осуществляется с точностью до дискретного сектора датчика угла. Время реакции алгоритмов управления ориентацией СБ, как правило, кратно машинному циклу бортовой вычислительной машины системы управления КА и составляет несколько десятков миллисекунд, например 100 мс [1].
Известно, что в результате накопления электростатических зарядов на внешней поверхности бортового оборудования КА, включая кабельную сеть, во время его функционирования периодически могут происходить короткие электростатические разряды, длительностью десятков наносекунд до нескольких микросекунд. Электростатические разряды приводят к излучению электромагнитной энергии и, таким образом, сопровождается генерацией электромагнитной помехи, влияющей на работу бортового оборудования КА. В частности, это может приводить к кратковременным сбоям информации, поступающей от датчика угла устройства поворота СБ.
Максимальная частота воздействия электростатического разряда не превышает 2 Гц [2] и соответствует периоду более 500 мс, что, в свою очередь, превышает упомянутый период 100 мс функционирования системы управления КА.
Наиболее близким техническим решением, принятым за прототип, является способ управления ориентацией СБ, заключающийся в том, что определяют заданный угол СБ как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к ее рабочей поверхности относительно связанных с КА осей координат, измеряют текущий угол СБ как угловое положение нормали к рабочей поверхности СБ в плоскости ее вращения с точностью до дискретного сектора датчика угла, вычисляют расчетный угол как произведение угловой скорости СБ на время ее вращения, определяют углы разбега и торможения, задают порог отпускания, менее которого прекращается рассогласование между заданным и расчетным углами СБ, как:
αОТП≈αТОРМ,
где αОТП - порог отпускания,
вращают солнечную батарею в направлении уменьшения рассогласования между расчетным и заданным углами и прекращают ее вращение при достижении порога отпускания [3].
Недостатком указанного способа является то, что в случае сбоев информации, поступающей от датчика угла СБ, может происходить коррекция расчетного угла по полученному ошибочному значению и, соответственно, неправильная ориентация СБ относительно направления на Солнце. Следствием этого является снижение тока, вырабатываемого СБ, что в конечном итоге приводит к снижению живучести КА и к невыполнению возложенных на него задач.
Технической задачей предлагаемого способа является расширение функциональных возможностей, повышение живучести и эффективности системы управления ориентацией СБ при кратковременных сбоях информации об угловом положении СБ, поступающей от датчика угла.
Указанный технический результат достигается тем, что в известном способе управления ориентацией солнечной батареи космического аппарата, заключающемся в том, что определяют заданный угол солнечной батареи как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к ее рабочей поверхности относительно связанных с космическим аппаратом осей координат, измеряют текущий угол солнечной батареи как угловое положение нормали к рабочей поверхности солнечной батареи в плоскости ее вращения с точностью до дискретного сектора датчика угла, вычисляют расчетный угол как произведение угловой скорости солнечной батареи на время ее вращения, определяют углы разбега и торможения, задают порог отпускания, менее которого прекращается рассогласование между заданным и расчетным углами солнечной батареи как:
αОТП≈αТОРМ,
где αОТП - порог отпускания,
вращают солнечную батарею в направлении уменьшения рассогласования между расчетным и заданным углами и прекращают ее вращение при достижении порога отпускания, дополнительно задают угловую скорость вращения солнечной батареи, превышающую на порядок и более угловую скорость вращения космического аппарата вокруг Земли, перед началом управления запоминают заданный угол и принимают начальное значение расчетного угла за достоверное значение текущего угла, задают порог рассогласования заданного и запомненного углов, как:
 ,
,
где αРАЗГ - угол разгона солнечной батареи;
αТОРМ - угол торможения солнечной батареи;
αПР - порог рассогласования заданного и запомненного углов;
IMIN - минимально допустимый ток, вырабатываемый солнечной
батареей;
IMAX - максимально возможный ток, вырабатываемый солнечной батареей,
разбивают круг датчика угла на равные дискретные сектора величиной:
(αРАЗГ+αТОРМ)<σ<αПР,
где σ - угловая величина одного дискретного сектора датчика угла, принимают положения биссектрис указанных дискретных секторов соответствующими измеряемым датчиком угла значениям, задают период определения достоверного значения текущего угла на порядок и более максимальной длительности сбоя информации, поступающей от датчика угла, и менее минимального интервала следования сбоев указанной информации, определяют достоверное значение текущего угла, при этом разбивают каждый из указанных периодов на четыре равных интервала времени, в конце первого, второго и третьего интервалов запоминают, соответственно, первое, второе и третье измеренные значения текущего угла, а в конце четвертого интервала считают достоверным значением текущего угла первое запомненное значение при совпадении его со вторым или третьим запомненными значениями, либо второе запомненное значение совпадении его с третьим, и формируют сигнал достоверности, сбрасывают сигнал достоверности, если указанных совпадений нет или два из трех запомненных значений не соответствуют угловым положениям биссектрис дискретных секторов датчика угла, если заданный угол отличается от запомненного заданного угла на момент окончания предыдущего вращения на величину более порога рассогласования между указанными углами, то присваивают расчетному углу значение достоверного текущего угла, если разность между расчетным и достоверным текущим углами превышает величину дискретного сектора датчика угла и сформирован сигнал достоверности, при этом вращают солнечную батарею, если рассогласование между расчетным и заданным углами более порога отпускания, а в момент достижения порога отпускания запоминают новое значение заданного угла.
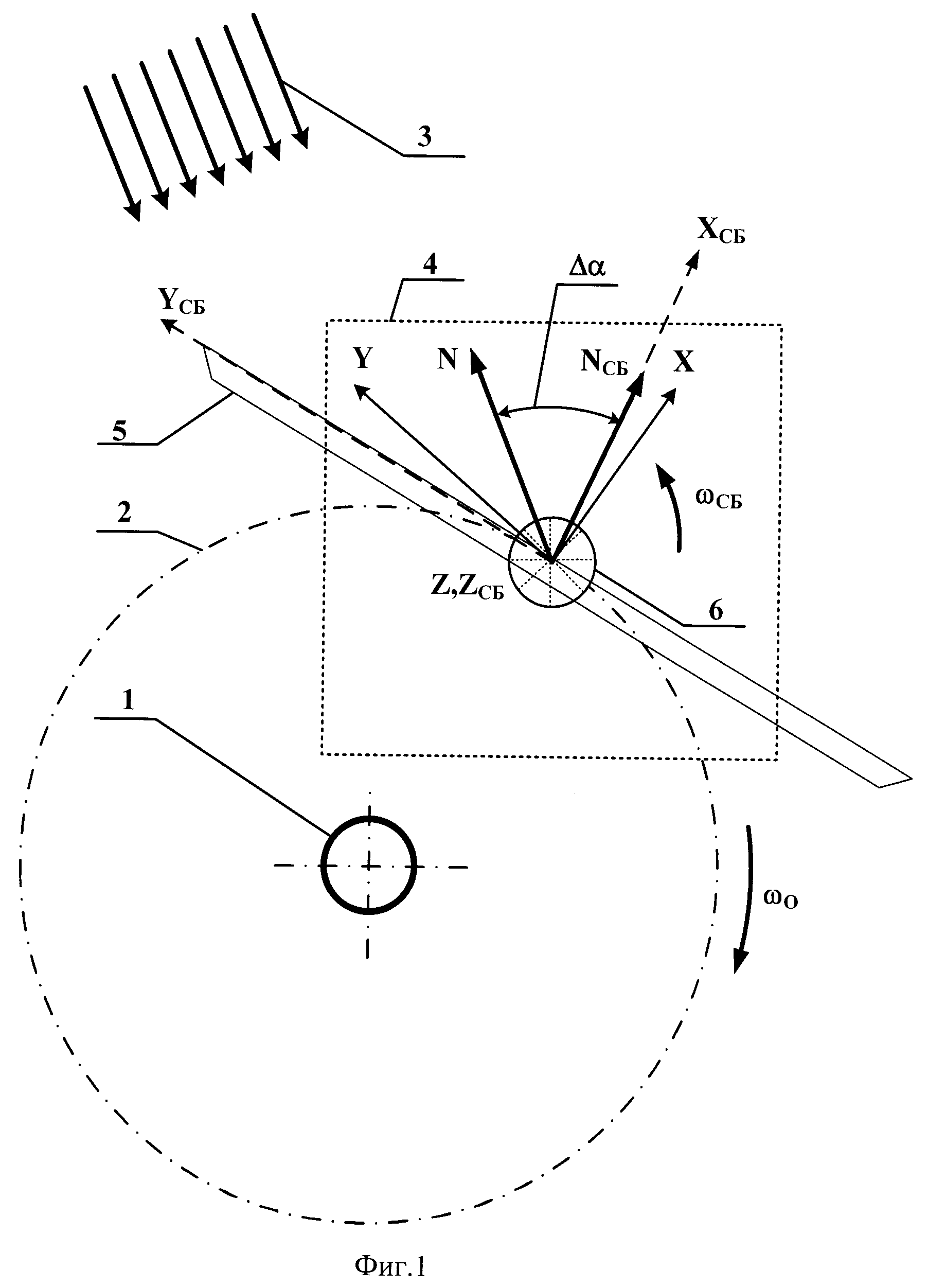
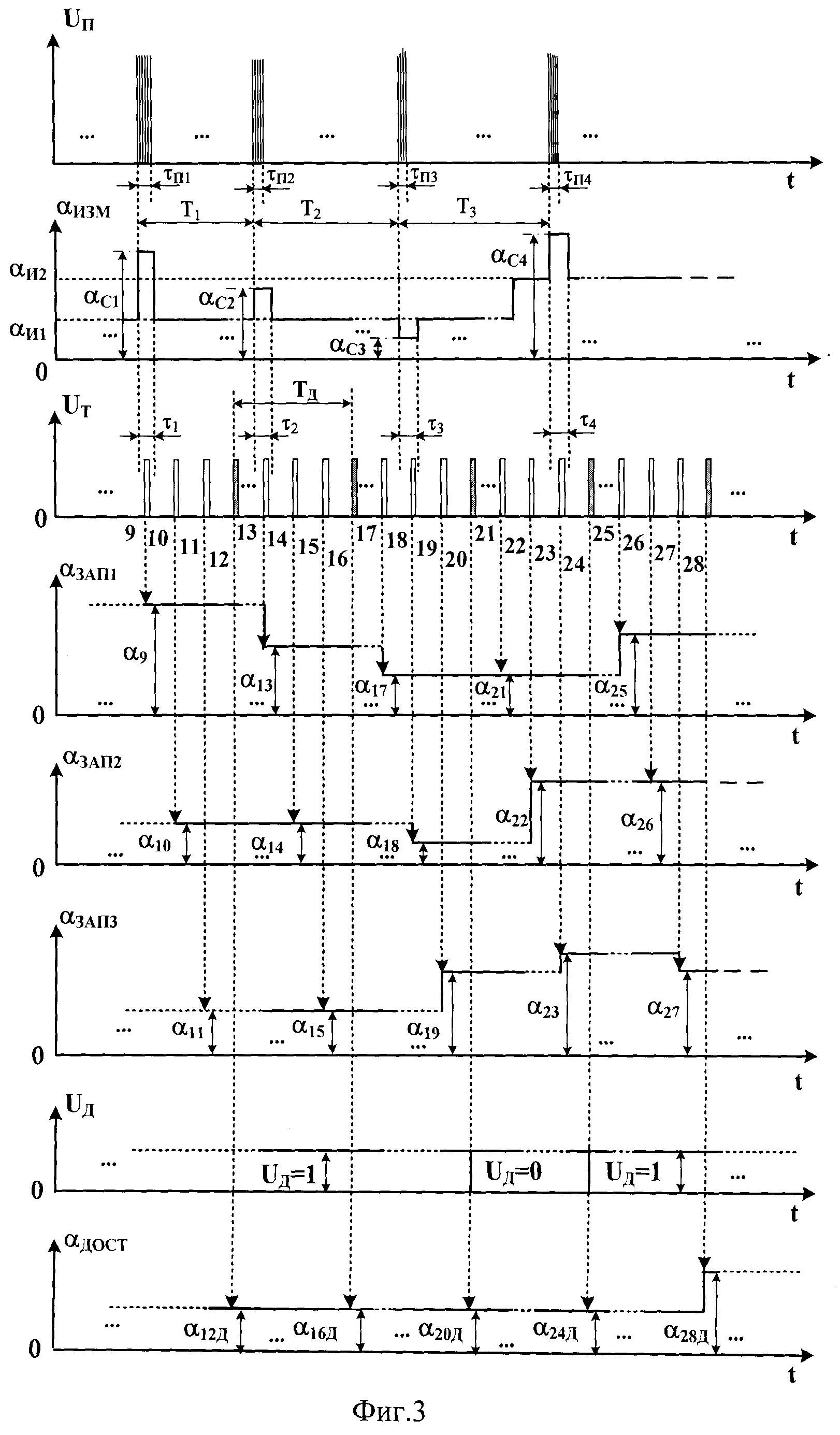
На фиг.1 представлен полет КА с СБ по орбите, на фиг.2 представлены положения проекции заданного направления на Солнце на плоскость, образованную кругом вращения нормали к рабочей поверхности СБ, а также положения указанной нормали, измеренные датчиком угла с точностью до дискретного сектора, на фиг.3 представлена циклограмма формирования достоверного значения датчика угла, на фиг.4 - циклограмма изменения заданного αЗАД, достоверного αДОСТ и расчетного αРАСЧ значений углов СБ.
Предлагаемый способ управления ориентацией солнечной батареи КА с защитой от кратковременных сбоев информации об угловом положении СБ реализуется следующим образом.
В процессе проектирования системы управления ориентацией СБ выбирают устройство поворота СБ с электромеханическим приводом, имеющим угловую скорость вращения выходного вала с закрепленной на нем СБ на порядок и более угловой скорости вращения КА вокруг Земли, то есть:

где ωСБ - постоянная угловая скорость вращения СБ;
ωКА - угловая скорость вращения КА вокруг Земли.
По паспортным данным, а также по результатам экспериментов на наземных стендах определяют угол разгона СБ как угловую величину отклонения нормали к рабочей поверхности СБ относительно связанных с КА осей координат с момента начала вращения СБ до достижения ею постоянной угловой скорости, а также угол торможения СБ как величину углового отклонения указанной нормали с момента прекращения рассогласования заданного и расчетного углов до момента окончания вращения. Кроме того, определяют минимально допустимый ток, необходимый для обеспечения работоспособности бортового оборудования КА, который должна формировать СБ, а также максимально возможный ток, который может формировать СБ.
Как известно, ток, формируемый СБ, зависит от величины угла отклонения нормали к рабочей поверхности СБ от направления на Солнце и может быть определен как:

где αР - угол рассогласования между направлением на Солнце и нормалью к рабочей поверхности СБ;
I - ток, вырабатываемый СБ;
IMAX - максимально возможный ток, который может вырабатывать СБ.
В процессе проектирования определяют максимально допустимое отклонение нормали к рабочей поверхности СБ от направления на Солнце во время полета КА по заданной орбите, при котором СБ вырабатывает указанный выше минимально допустимый ток, при этом задают порог рассогласования заданного и запомненного углов в диапазоне:

где αРАЗГ - угол разгона СБ;
αТОРМ - угол торможения СБ;
αПР - порог рассогласования заданного и запомненного углов;
IMIN - минимально допустимый ток, который вырабатывает СБ для обеспечения функционирования бортового оборудования КА;
IMAX - максимально возможный ток, который может вырабатывать СБ при полете КА по заданной орбите.
Датчик угла, расположенный на выходном валу электромеханического привода устройства поворота СБ, представляет собой круг 360°, разбитый на равные дискретные сектора, то есть:
где σ - угловая величина дискретного сектора датчика угла;
n - количество дискретных угловых секторов.
Величина дискретного сектора датчика угла задается в диапазоне:

Как правило, порог рассогласования заданного и запомненного углов выбирают в диапазоне 5°-15°, а углы разгона и торможения не превышают величину 1°.
Датчик угла СБ закреплен на выходном валу электромеханического привода устройства поворота СБ таким образом, что угловое значение, формируемое им, соответствует положению нормали к рабочей поверхности СБ относительно связанных с КА осей координат. Во время поворота СБ датчик угла формирует угловое значение, соответствующее положению биссектрисы дискретного сектора, в границах которого находится эта нормаль.
Во время полета КА определяют заданный угол как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к ее рабочей поверхности относительно связанных с КА осей координат.
Вычисляют расчетный угол как произведение угловой скорости СБ на время ее вращения.
На этапе разработки задают порог отпускания, менее которого прекращается рассогласование между заданным и расчетным угловым положением нормали к рабочей поверхности СБ, как:
αОТП≈αТОРМ.
Принимают начальное значение расчетного угла за достоверное значение текущего угла. Определение достоверного значения датчика угла во время функционирования системы управления ориентацией СБ осуществляют в течение четырех равных интервалов времени, на которые разбивается период определения достоверного значения текущего угла, то есть:

где ТД - период определения достоверного значения текущего угла;
ТИ - интервал времени, равный четверти периода определения достоверного значения текущего угла.
Как правило, период определения достоверного значения текущего угла выбирают кратным машинному циклу бортовой вычислительной машины системы управления КА. Достоверное значение угла формируется, если два из трех измеренных значения датчика угла в одном периоде совпадают, при этом период определения достоверного значения текущего угла задается в диапазоне:

где τMAX - максимальная длительность сбойной информации, поступающей от датчика угла;
TMIN - минимальный интервал следования сбоев информации, поступающей от датчика угла.
Для определения достоверного значения текущего угла в конце первого, второго и третьего интервалов времени запоминают соответственно первое, второе и третье измеренное значение текущего угла, а в конце четвертого интервала присваивают достоверному значению текущего угла первое запомненное значение, если оно совпадает со вторым или третьим, либо второе, если оно совпадает с третьим запомненным значением, при этом формируют сигнал достоверности. В случае если указанных совпадений нет либо измеренное значение не соответствует угловому положению биссектрисы одного из дискретных секторов датчика угла, сбрасывают сигнал достоверности, то есть на каждом периоде:

где αИЗi(1), αИЗi(2), αИЗi(3) - текущие измеренные и запомненные значения датчиком угла по окончании первого, второго и третьего интервалов определения достоверности на i-м цикле вращения;
αДОСТi - достоверное значение датчика угла на i-м цикле вращения;
UДi - сигнал достоверности на i-том цикле вращения;
i - номер цикла вращения, i≥0.
При наличии кратковременной помехи, вызываемой, например, электростатическим разрядом, формируется сбойная информация, поступающая от датчика угла через электронные блоки СБ в систему управления КА. Длительность сбоя датчика угла соответствует длительности помехи.
Например, рассматриваемая система имеет угловую скорость вращения СБ ωСБ=0,6 градусов/с, величина дискретного сектора датчика угла СБ составляет σ=6°, максимальная длительность сбоя информации датчика угла СБ, вызываемая электростатическим разрядом, составляет τMAX=1,5 мкс, минимальный период следования сбоев ТMIN=1 с, что соответствует частоте 1 Гц.
Для рассматриваемого варианта в случае если цикл вычисления системы управления КА кратен машинному циклу системы управления КА 100 мс и соответствует интервалу измерения ТИ=200 мс [1], условия (6), (7) выполняются, так как:
10·τMAX=10·1,5 мкс=0,000015 с;
ТД=4·ТИ=4-200 мс=0,8 с;
TMIN=1 c.
Перед началом управления запоминают заданный угол и задают расчетному углу начальное значение, то есть:

где αЗАДi - текущее значение заданного угла на момент начала 1-го вращения;
αЗАД(i-1) - запомненное значение заданного угла на момент окончания (i-1)-го вращения;
α0 - начальное значение расчетного угла;
αРАСЧ(i) - расчетный угол на i-м цикле вращения.
Разрешают вращение СБ, если текущий заданный угол отличается от запомненного на момент окончания предыдущего вращения заданного угла на величину более порога рассогласования заданного и запомненного углов, то есть при:

при этом перед моментом начала вращения присваивают расчетному углу значение текущего достоверного угла, если разность между ними превышает величину дискретного сектора датчика угла и на момент получения разрешения на вращение сформирован сигнал достоверности, то есть:

Необходимо отметить, что в процессе управления рассогласование между расчетным и фактическим угловым положением СБ постепенно увеличивается, так как на реальную угловую скорость СБ оказывают влияние различные факторы: люфты в механизме электромеханического привода, изменение сил трения подвижных частей в условиях невесомости, вакуума и под воздействием космических и солнечных излучений, температурные воздействия, колебания панели СБ в моменты начала и окончания вращения, изменения сил инерции при разворотах КА и другие. Из-за указанных факторов наблюдается постепенное расхождение фактического углового положения СБ от расчетного.
Начинают вращение СБ, если текущий заданный угол и запомненный заданный угол отличаются на величину более порога рассогласования между указанными углами, и если рассогласование между расчетным и заданным углами более порога отпускания, то есть при:

Во время вращения СБ вычисляют расчетный угол, как:

где αРАСЧi - расчетное значение углового положения СБ на момент начала вращения;
tСБi - время вращения СБ. Прекращают вращение СБ при достижении порога отпускания:

при этом запоминают значение текущего заданного угла:

На фиг.1 представлен полет КА с СБ по орбите, где:
1 - Земля;
2 - орбита КА;
3 - направление излучения от Солнца;
4 - корпус КА;
5 - панель СБ;
6 - датчик угла СБ;
N - заданное направление ориентации СБ как проекция единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ;
NСБ - нормаль к рабочей поверхности СБ;
X, Y, Z - оси связанной с КА системы координат, причем ось Z направлена перпендикулярно плоскости чертежа вверх;
XСБ, YСБ, ZСБ - оси связанной с СБ системы координат, ось ZСБ совпадает с осью Z и направлена также перпендикулярно плоскости чертежа вверх;
Δα - угловое рассогласование между направлением на Солнце и нормалью к рабочей поверхности СБ;
ωO - угловая скорость вращения КА вокруг Земли;
ωСБ - угловая скорость вращения СБ вокруг оси ZСБ.
На фиг.1 вокруг Земли 1 по орбите 2 с угловой скоростью ωO вращается КА. По направлению излучения Солнца 3 относительно корпуса КА 4 осуществляется ориентация панели СБ 5. Угловое положение проекции нормали к рабочей поверхности СБ NСБ относительно единичного вектора направления на Солнце N измеряется при помощи датчика угла 6. С корпусом 4 КА жестко связаны оси X, Y, Z системы координат. В свою очередь, оси XСБ, YСБ, ZСБ образуют связанную с СБ систему координат. СБ вращается вокруг оси ZСБ, направленной перпендикулярно вверх к плоскости чертежа, причем направления осей ZСБ и Z совпадают, а плоскость, образованная осями XСБ и YСБ, параллельна плоскости, образованной осями Х и Y. Направление нормали к рабочей поверхности СБ NСБ совпадает с направлением оси XСБ.
Датчик угла СБ 6 формирует нулевое значение при совпадении направлений осей XСБ и X. В соответствии с направлением излучения Солнца 3 определяют направление проекции единичного вектора направления на Солнце N на плоскость, образованную осями XСБ и YСБ.
В процессе полета КА по орбите 2 с угловой скоростью ωO панель СБ 5 разворачивают таким образом, чтобы обеспечить минимальный угол рассогласования Δα между направлением проекции единичного вектора направления на Солнце N на плоскость вращения нормали к рабочей поверхности СБ, образованную осями XСБ и YСБ и указанной нормалью NСБ, в результате чего обеспечивается формирование максимально возможного тока.
При управлении рассматриваемым способом, если угол рассогласования между текущим заданным углом, т.е. положением проекции N, и запомненным заданным углом по окончании предыдущего вращения СБ более порога рассогласования заданного и запомненного углов, а также рассогласование между расчетным углом, т.е. положением нормали NСБ, и заданным углом, т.е. проекцией N, более порога отпускания, то панель СБ 5 разворачивают с угловой скоростью ωСБ до совмещения положения нормали NСБ с положением проекции N.
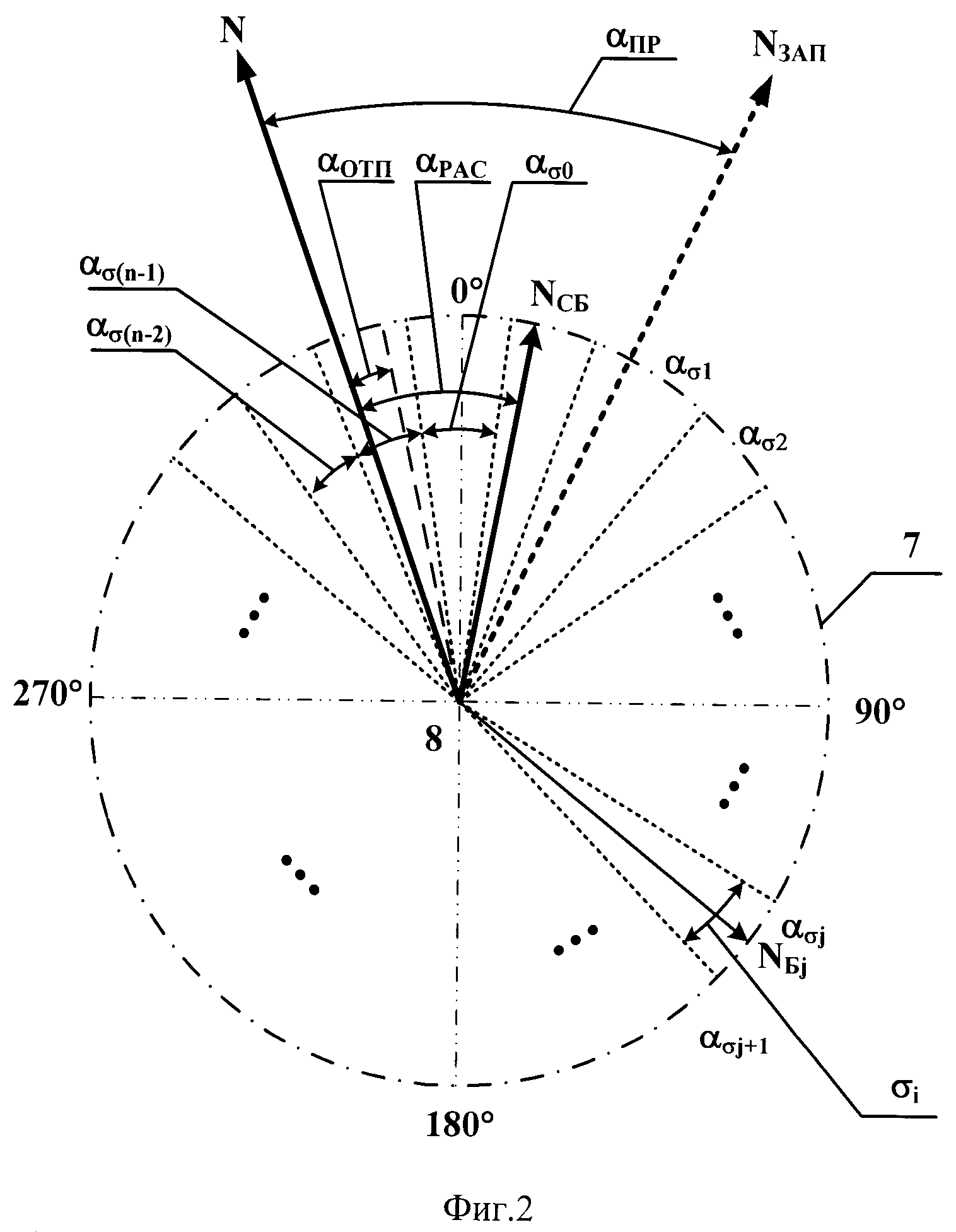
На фиг.2 представлен круг вращения нормали к рабочей поверхности СБ, положение которой измеряется датчиком угла, где:
7 - круг вращения нормали к рабочей поверхности СБ;
8 - центр круга вращения нормали к рабочей поверхности СБ;
N - заданное направление ориентации СБ как проекция единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ;
NСБ - нормаль к рабочей поверхности СБ;
ασ0, ασ1, ασ2,…,ασj, α(j+1)… ασ(n-2), ασ(n-1) - дискретные сектора датчика угла;
NБj - биссектриса дискретного сектора ασj
αПР - порог рассогласования заданного и запомненного углов;
σ - угловая величина дискретного сектора датчика угла.
αРАС - угол рассогласования между текущим заданным направлением и положением нормали к рабочей поверхности СБ;
αОТП - порог отпускания.
На фиг.2 датчик угла СБ выполнен в виде круга вращения нормали к рабочей поверхности СБ 7 с центром 8. Круг 360° разбит на n равных дискретных секторов ασ0, ασ1, ασ2,…,ασj, α(j+1)… ασ(n-2), ασ(n-1). Указанный датчик устанавливается на корпусе КА таким образом, чтобы нулевое положение совпадало с осью X, связанной с КА системы координат. Таким образом, измерение углового положения нормали к рабочей поверхности СБ NСБ осуществляется с точностью до дискретного сектора величиной σ, причем датчик угла формирует значения, соответствующие положениям биссектрис каждого из секторов ασ0,…ασ(n-1).
При управлении рассматриваемым способом панель СБ начинает вращение при рассогласовании углов между текущим N и запомненным по окончании предыдущего вращения заданным направлением на Солнце NЗАП более порога рассогласования заданного и запомненного углов αПР, и если положение нормали к рабочей поверхности СБ NСБ отличается от текущего заданного направления N на угол αP более порога отпускания αОТП.
На фиг.3 представлена циклограмма формирования достоверного значения датчика угла, где:
UП - сигналы помехи;
τП1, τП2,, τП3, τП4 - длительности помех, вызывающих сбои датчика угла;
τ1, τ2, τ3, τ4 - длительности сбоев датчика угла;
Т1, Т2, Т3 - интервалы следования сбоев датчика угла;
αИЗМ - измеренный угол СБ;
UT - такты запоминания измеренных значений углов датчиком угла СБ;
ТД - период определения достоверного значения измеренного угла;
αЗАП1 - измеренные и запомненные значения датчика угла по окончании первых интервалов определения достоверности;
αЗАП2 - измеренные и запомненные значения датчика угла по окончании вторых интервалов определения достоверности;
αЗАП3 - измеренные и запомненные значения датчика угла по окончании третьих интервалов определения достоверности;
UД - сигнал достоверности измеренного значения датчика угла;
αДОСТ - значения достоверного угла СБ;
αИ1, αИ2 - измеренные датчиком угла угловые значения, соответствующие фактическим угловым положениям СБ;
αC1, αC2, αC3, αC4 - измеренные датчиком угла угловые значения, соответствующие искаженным угловым положениям СБ;
9, 13, 17, 21, 25 - моменты запоминания значений датчика угла по окончании первых интервалов определения достоверности;
α9, α13, α17, α21, α25 - запомненные значения датчика угла по окончании первых интервалов определения достоверности;
10, 14, 18, 22, 26 - моменты запоминания значений датчика угла по окончании вторых интервалов определения достоверности;
α10, α14, α18, α22, α26 - запомненные значения датчика угла по окончании вторых интервалов определения достоверности;
11. 15, 19, 23, 27 - моменты запоминания значений датчика угла по окончании третьих интервалов определения достоверности;
α11, α15, α19, α23, α27 - запомненные значения датчика угла по окончании третьих интервалов определения достоверности;
12. 16, 20, 24, 28 - моменты определения достоверности по окончании четвертых интервалов определения достоверности;
α12Д, α16Д, α20Д, α24Д, α28Д - запомненные достоверные значения датчика угла по окончании четвертых интервалов определения достоверности.
На фиг.3. формирование достоверного значения датчика угла αДОСТ осуществляется по тактам UT с периодом равным ТД, при этом каждый период ТД, разделен на 4 равные части.
В моменты 9, 13, 17, 21, 25 осуществляется запоминание первых αЗАП1 в моменты 10, 14, 18, 22, 26 вторых αзап2, а в моменты 11, 15, 19, 23, 27 третьих αЗАП3 угловых положений СБ измеренных датчиком угла.
В моменты 12, 16, 20, 24, 28 осуществляется сравнение первых, вторых и третьих измеренных значений датчика угла и формирование достоверного угла αДОСТ.
Угловые значения αИ1, αИ2 соответствуют фактическим угловым положениям СБ.
С интервалами T1, T2, Т3 наблюдаются сбои датчика угла длительностью τ1, τ2, τ3, τ4, вызванные помехами, соответственно длительностью τП1, τП2, τП3, τП4, различной амплитуды UП, при этом:
-τП1<<τ1<ТД, τП2<<τ2<ТД, τП3<<τ3<ТД, τП4<<τ4<ТД;
-в моменты 9, 13, 18 и 23 соответственно запоминаются сбойные значения αC1, αC2, αC3, αC4, формируемые датчиком угла;
В момент 12 формируется достоверное значение датчика угла α12Д=αИ1, так как α10=α11=αИ1, UД=1, при этом сбойное значение α9=αC1 игнорируется.
В момент 16 формируется достоверное значение датчика угла α16Д=αИ1, так как α10=α11=αИ1, UД=1, при этом сбойное значение α13=αС2 игнорируется.
В момент 20 формируется достоверное значение датчика угла α0=αИ1, так как α17=α19=αИ1, UД=1, при этом сбойное значение α18=αC3 игнорируется.
В момент 24 достоверное значение датчика угла сохраняется с предыдущего цикла α24Д=αИ1, так как α21=αИ1 α22=αИ2, α23=αС4, то есть α21≠022, α21≠α23, α22≠α23, при этом UД=0.
В момент 28 формируется достоверное значение датчика угла α28Д=αИ2, так как α26=α25=αИ2, UД=1.
На фиг.4 представлен график управления положением СБ предлагаемым способом с коррекцией расчетного угла и соответствующий ему график формирования сигнала достоверности измеренного значения датчика угла, где:
UД - сигнал достоверности измеренного значения датчика угла;
αЗАД - заданный угол СБ;
αДОСТ - достоверный измеренный угол СБ;
αРАСЧ - расчетный угол СБ;
αЗАД1, αЗАД3 - заданные углы на моменты окончания вращения СБ;
αЗАД2, αЗАД4 - заданные углы на моменты начала вращения СБ;
αДОСТ1, αДОСТ2 - достоверные измеренные углы на моменты окончания вращения СБ;
αРАСЧ1, αРАСЧ2 - расчетные углы на моменты окончания вращения СБ;
σ - угловая величина одного дискретного сектора датчика угла;
29, 33 - моменты прекращения вращения СБ;
30, 34 - моменты начала вращения СБ;
31 - моменты прекращения формирования сигнала достоверности;
32 - момент возобновления формирования сигнала достоверности;
αПР - порог рассогласования заданного и запомненного углов;
αОТП - угол отпускания;
Δ1, Δ2 - углы рассогласования между расчетными и достоверными значениями углов.
На приведенной на фиг.4 циклограмме показаны изменения заданного αЗАД, достоверного измеренного αДОСТ и расчетного αРАСЧ значений углов СБ.
В момент 29 достижения рассогласования между расчетным αРАСЧ=αРАСЧ1 и заданным αЗАД=αЗАД1 углами менее порога отпускания αОТП, то есть выполняется условия (14), вращение СБ прекращается.
В момент 30 рассогласование между заданным углом αЗАД=αЗАД2 и запомненным заданным углом αЗАД3=αЗАД1 превышает порог рассогласования заданного и запомненного углов αПР, то есть выполняется условие (10), при этом рассогласование между расчетным αРАСЧ=αРАСЧ1 и заданным αЗАД=αЗАД2 углами более порога отпускания αОТП, то есть выполняется условие (12). Кроме того, в момент 30 сформирован сигнал достоверности UД=1 и рассогласование Δ1 между расчетным αРАСЧ=αРАСЧ1 и достоверным αДОСТ=αДОСТ1 углами более величины дискретного сектора датчика угла σ, то есть выполняется условие (11). Учитывая сформированные условия в момент 30, осуществляется коррекция расчетного угла, при этом корректируется расчетный угол по сформированному достоверному значению, то есть αРАСЧ=αДОСТ1. Далее осуществляется вращение СБ, во время которого производится вычисление расчетного угла по уравнению (13).
В момент 33 достижения рассогласования между расчетным αРАСЧ=αРАСЧ2 и заданным αЗАД3=αЗАД3 углами менее порога отпускания αОТП, то есть выполняется условия (14), вычисление расчетного угла и вращение СБ прекращается. Отсутствие достоверного значения измеренного угла от момента 31 до момента 32 не влияет на значение расчетного угла.
В момент 34 величина рассогласования между текущим заданным углом αЗАД=αЗАД4 и запомненным заданным углом αЗАДЗ=αЗАД3 превышает порог рассогласования заданного и запомненного углов αОТП, то есть выполняется условие (10), при этом рассогласование между расчетным αРАСЧ=αРАСЧ2 и заданным αЗАД=αЗАД4 углами значительно более порога отпускания αОТП, то есть выполняется условие (12). Кроме того, в момент 33 сформирован сигнал достоверности UД=1 и рассогласование Δ1 между расчетным αРАСЧ=αРАСЧ2 и достоверным αДОСТ=αДОСТ2 углами менее величины дискретного сектора датчика угла σ, то есть условие (11) не выполняется. Учитывая сформированные условия в момент 33, коррекция расчетного угла не производится. Далее осуществляется вращение СБ, во время которого производится вычисление расчетного угла по уравнению (13).
Предлагаемый способ управления позволяет обеспечить правильную ориентацию СБ при кратковременных сбоях информации от датчика угла, вызываемыми, например, статическими разрядами, за счет сравнительного анализа информации об угловом положении СБ, получаемой в различные моменты времени, а также за счет уменьшения влияния сбойных значений, формируемых датчиком угла СБ на расчетный угол в связи с увеличением интервалов коррекции расчетного угла СБ по фактическому значению, и, таким образом, обеспечить величину тока, достаточную для функционирования бортового оборудования, что повышает живучесть КА в целом.
Источники информации
1. Бортовые системы управления космическими аппаратами. Под ред. д.т.н, проф. А.С.Сырова. М., изд-во МАИ-ПРИНТ, 2010, с.219, 243.
2. Электростатические разряды на поверхности космических аппаратов и их воздействие на бортовую кабельную сеть. А.Н.Дорофеев. Диссертация на соискание ученой степени кандидата технических наук. М., 2007, с.25. www.dslib.net/kondensat/jelektrostaticheskie-razrjady-na-poverhnosti-kosmicheskih-apparatov-i-ih-vozdejstvie.html.
3. Патент РФ 2356788, В64С 1/00, 28.12.2007 г.
Способ управления ориентацией солнечной батареи космического аппарата с защитой от кратковременных сбоев информации об угловом положении солнечной батареи, заключающийся в том, что определяют заданный угол солнечной батареи как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к ее рабочей поверхности относительно связанных с космическим аппаратом осей координат, измеряют текущий угол солнечной батареи как угловое положение нормали к рабочей поверхности солнечной батареи в плоскости ее вращения с точностью до дискретного сектора датчика угла, вычисляют расчетный угол как произведение угловой скорости солнечной батареи на время ее вращения, определяют углы разбега и торможения, задают порог отпускания, менее которого прекращается рассогласование между заданным и расчетным углами солнечной батареи, как:α≈ α,где α - порог отпускания,вращают солнечную батарею в направлении уменьшения рассогласования между расчетным и заданным углами и прекращают ее вращение при достижении порога отпускания, отличающийся тем, что задают угловую скорость вращения солнечной батареи, превышающую на порядок и более угловую скорость вращения космического аппарата вокруг Земли, перед началом управления запоминают заданный угол и принимают начальное значение расчетного угла за достоверное значение текущего угла, задают порог рассогласования заданного и запомненного углов как: ,где α - угол разгона солнечной батареи;α - угол торможения солнечной батареи;α - порог рассогласования заданного и запомненного углов;I - минимально допустимый ток, вырабатываемый солнечной батареей;I - максимально возможный ток, вырабатываемый солнечной батареей,разбивают круг датчика угла на равные дискретные сектора величиной:(α+ α)< σ < α,где σ - угловая величина одного дискретного сектора датчика угла, принимают положения биссектрис указанных дискретных секторов соответствующими измеряемым датчиком угла значениям, задают период определения достоверного значения текущего угла на порядок и более максимальной длительности сбоя информации, поступающей от датчика угла, и менее минимального интервала следования сбоев указанной информации, определяют достоверное значение текущего угла, при этом разбивают каждый из указанных периодов на четыре равных интервала времени, в конце первого, второго и третьего интервалов запоминают, соответственно, первое, второе и третье измеренные значения текущего угла, а в конце четвертого интервала считают достоверным значением текущего угла первое запомненное значение при совпадении его со вторым или третьим запомненными значениями, либо второе запомненное значение при совпадении его с третьим, и формируют сигнал достоверности, сбрасывают сигнал достоверности, если указанных совпадений нет или два из трех запомненных значений не соответствуют угловым положениям биссектрис дискретных секторов датчика угла, если заданный угол отличается от запомненного заданного угла на момент окончания предыдущего вращения на величину более порога рассогласования между указанными углами, то присваивают расчетному углу значение достоверного текущего угла, если разность между расчетным и достоверным текущим углами превышает величину дискретного сектора датчика угла и сформирован сигнал достоверности, при этом вращают солнечную батарею, если рассогласование между расчетным и заданным углами более порога отпускания, а в момент достижения порога отпускания запоминают новое значение заданного угла.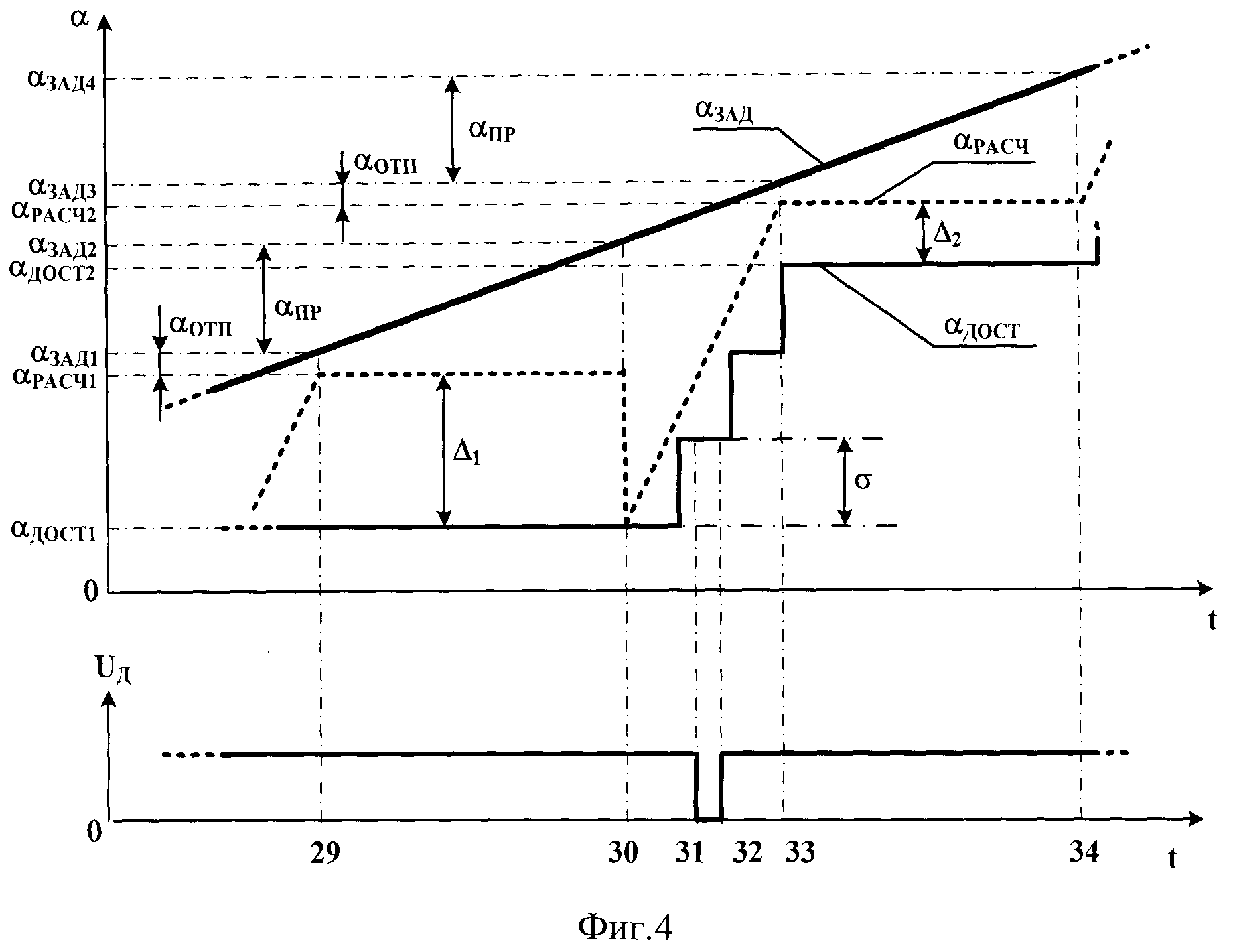
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации

