Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ ОРБИТАЛЬНОГО ГИРОКОМПАСА
Вид РИД
Изобретение
Предлагаемое изобретение относится к области космической техники и может быть использовано для управления положением космического аппарата (КА) в пространстве с использованием орбитального гирокомпаса (ОГК). Наиболее близким аналогом может служить техническое решение, представленное в статье авторов Кэмпбел, Коффи «Цифровые системы отсчета углов». Журнал «Вопросы ракетной техники», 1971 г., №11, стр.63-88. В нем рассматривается устройство для управления положением космического аппарата (КА) в пространстве с использованием орбитального гирокомпаса (ОГК), в состав которого входит измеритель абсолютной угловой скорости (ГИУС), построитель местной вертикали (ПМВ) и вычислитель, реализующий алгоритм режима орбитального гирокомпасирования относительно орбитальной системы координат (ОСК).
Известно так же устройство управления положением КА с использованием ОГК, в состав которого входят гироприбор ориентации (ГПО) в кардановом подвесе, ПМВ, вычислитель и блок задания путевого угла (БЗП) КА по курсу («Системы управления космических комплексов на базе орбитальной станции «Алмаз»». Эскизный проект. Система ориентации, стр.6, 72, 188. НПО Машиностроения. 1990 г.). Данное устройство работает в режиме трехосного ОГК и в процессе построения приборной ОСК непрерывно управляет положением КА по курсу относительно ОСК. Недостаток устройства заключается в том, что при управлении положением КА по курсу угол курсового поворота КА ограничен. Сохраняя режим орбитального гирокомпасирования, КА возможно повернуть относительно ОСК на углы ≤3÷4°. При дальнейшем повороте КА быстро нарастают погрешности по всем трем каналам ориентации и при углах курсового поворота КА ≥10° ошибки ориентации становятся недопустимо большими, в то время как требуется управление пространственным положением КА на произвольный курсовой угол без потери точности ориентации относительно ОСК по всем каналам. Таким образом, при повороте КА на произвольный курсовой угол требуется выполнение условий:
ψ=ψП, γ=0, ϑ=0,
где ψ, γ, ϑ - углы ориентации КА относительно ОСК по курсу, крену и тангажу соответственно;
ψП - программное значение угла положения КА по курсу.
Для получения возможности такого управления необходимо, чтобы в процессе управления угловым положением КА по курсу непрерывно сохранялся режим ОГК. Такой возможности в известных устройствах управления пространственным положением КА с помощью ОГК нет.
Целью предлагаемого решения является устранение указанных недостатков, т.е. создание устройства для управления пространственным положением космического аппарата (КА) по курсу с сохранением режима орбитального гирокомпаса (ОГК) без потери точности ориентации.
Наиболее близким аналогом может служить техническое решение для управления положением космического аппарата (КА) в пространстве с использованием орбитального гирокомпаса (ОГК), в состав которого входит измеритель абсолютной угловой скорости (ГИУС), построитель местной вертикали (ПМВ), вычислитель, реализующий алгоритм режима ОГК, и блок задания положения (БЗП) КА по курсу.
Согласно изобретению, технический результат достигается тем, что в известное устройство, содержащее построитель местной вертикали (ПМВ), выход которого по каналу крена подключен к последовательно соединенным первому сумматору, первому усилительно-преобразовательному блоку (УПБ), второму сумматору, третьему сумматору, первому интегратору, выход которого образует выход ОГК по каналу крена. Выход первого же сумматора по каналу курса подключен к последовательно соединенным второму УПБ, четвертому сумматору, пятому сумматору, второму интегратору, выход которого образует выход ОГК по каналу курса. Выход ПМВ по каналу тангажа подключен к последовательно соединенным шестому сумматору, третьему УПБ, седьмому сумматору и третьему интегратору, выход которого образует выход ОГК по каналу тангажа. В состав известного устройства входят так же первый и второй блоки компенсации взаимовлияний каналов (БКВК), гироскопический измеритель угловой скорости (ГИУС) и блок задания путевого угла БЗП, при этом второй вход первого сумматора подключен к выходу первого интегратора, второй вход шестого сумматора подключен к выходу третьего интегратора, а вторые входы второго, четвертого и седьмого сумматоров подключены к выходам ГИУС соответственно по каналам крена, курса и тангажа, а вторые входы третьего и пятого сумматоров подключены соответственно к выходам первого и второго БКВК, входы которых соединены с выходами второго и первого интеграторов соответственно, а выход БЗП подключен к выходу второго интегратора.
Для реализации задачи пространственного поворота КА в известное устройство введены новые блоки и связи, а именно: четвертый УПБ, первый, второй и третий косинусные преобразователи углов (КПУ), первый, второй и третий синусные преобразователи углов (СПУ), восьмой и девятый сумматоры, третий и четвертый БКВК, а также блок управления положением (БУП) КА по курсу. При этом вход четвертого УПБ подключен к выходу шестого сумматора, а его выход и выход второго УПБ подключены соответственно к первым входам первого СПУ и первого КПУ, выходы которых подключены к первому и второму входам восьмого сумматора, выход которого подключен ко второму входу четвертого сумматора. Входы третьего и четвертого БКВК подключены к выходам третьего и второго интеграторов соответственно, а их выходы подключены соответственно к первым входам второго и третьего СПУ, выходы которых подключены к третьему входу пятого и второму входу девятого сумматоров соответственно. Первый, второй и третий выходы БУП подключены к третьим входам соответственного второго, четвертого и седьмого сумматоров, таким образом, что формируют на выходах сигналы углового положения КА в соответствии со следующими выражениями:
- в канале крена: -Ωп·sinψП,
- в канале курса: 
- в канале тангажа: +Ωп·cosψП,
где Ωп - программное значение орбитальной угловой скорости.
При этом вход БУП соединен с выходом БЗП, выход которого подключен так же ко вторым входам каждого СПУ и КПУ.
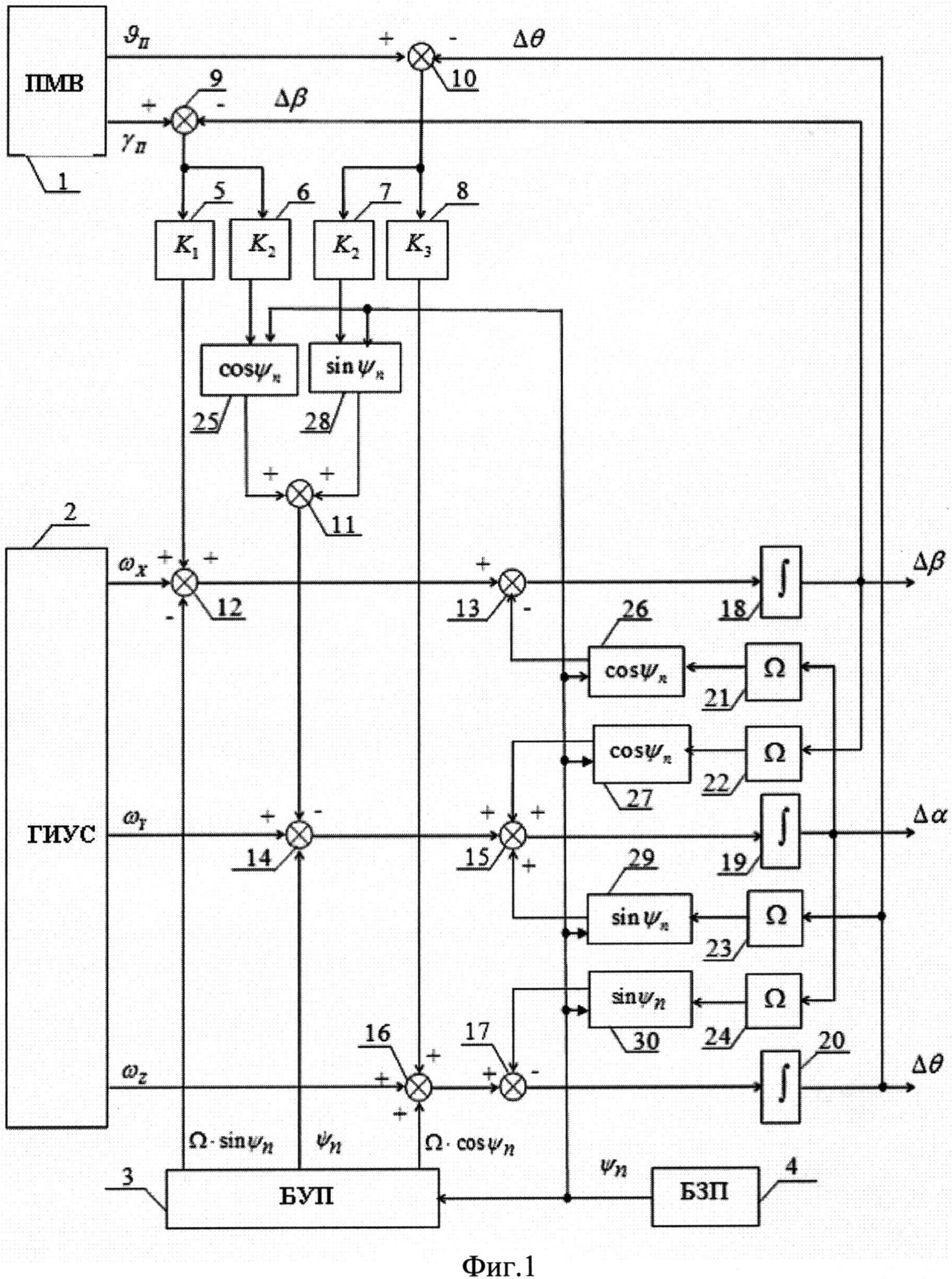
На фиг.1 показана структурно-функциональная схема устройства управления положением космического аппарата (КА) в пространстве с использованием орбитального гирокомпаса (ОГК).
На фиг.1 обозначено:
1 - построитель местной вертикали (ПМВ) с выходами по крену γПМВ и тангажу ϑПМВ соответственно;
2 - гироскопический измеритель угловых скоростей (ГИВУС); с
3 - БЗП;
4 - БУП;
5-8 - усилительно-преобразовательные блоки (УПБ);
9-17 - сумматоры;
18-20 - интеграторы;
21-24 - блоки компенсации взаимовлияний каналов (БКВК);
25-27 - КПУ;
28-30 - СПУ;
Δβ, Δα, Δθ - выходные углы ОГК по крену, курсу и тангажу соответственно;
ψП,  - программный угол и программная угловая скорость поворота КА по курсу;
- программный угол и программная угловая скорость поворота КА по курсу;
К1, К2,К3, K4 - коэффициенты коррекции;
ωX, ωY, ×Z - выходные сигналы ИАУС, соответствующие угловым скоростям КА по крену, курсу и тангажу;
Ω=const - орбитальная угловая скорость (рассматриваются околокруговые орбиты КА).
На фиг.2 показаны результаты моделирования полных уравнений движения КА при задании пространственного положения КА по курсу на 45°.
На фиг.2 обозначено:
ψП - заданное (программное) значение угла поворота КА;
γ, ψ, ϑ - углы ориентации КА относительно ОСК соответственно по крену, курсу и тангажу в процессе изменения положения КА по курсу;
ωX, ωY, ωZ - угловые скорости КА по курсу, крену и тангажу относительно ОСК.
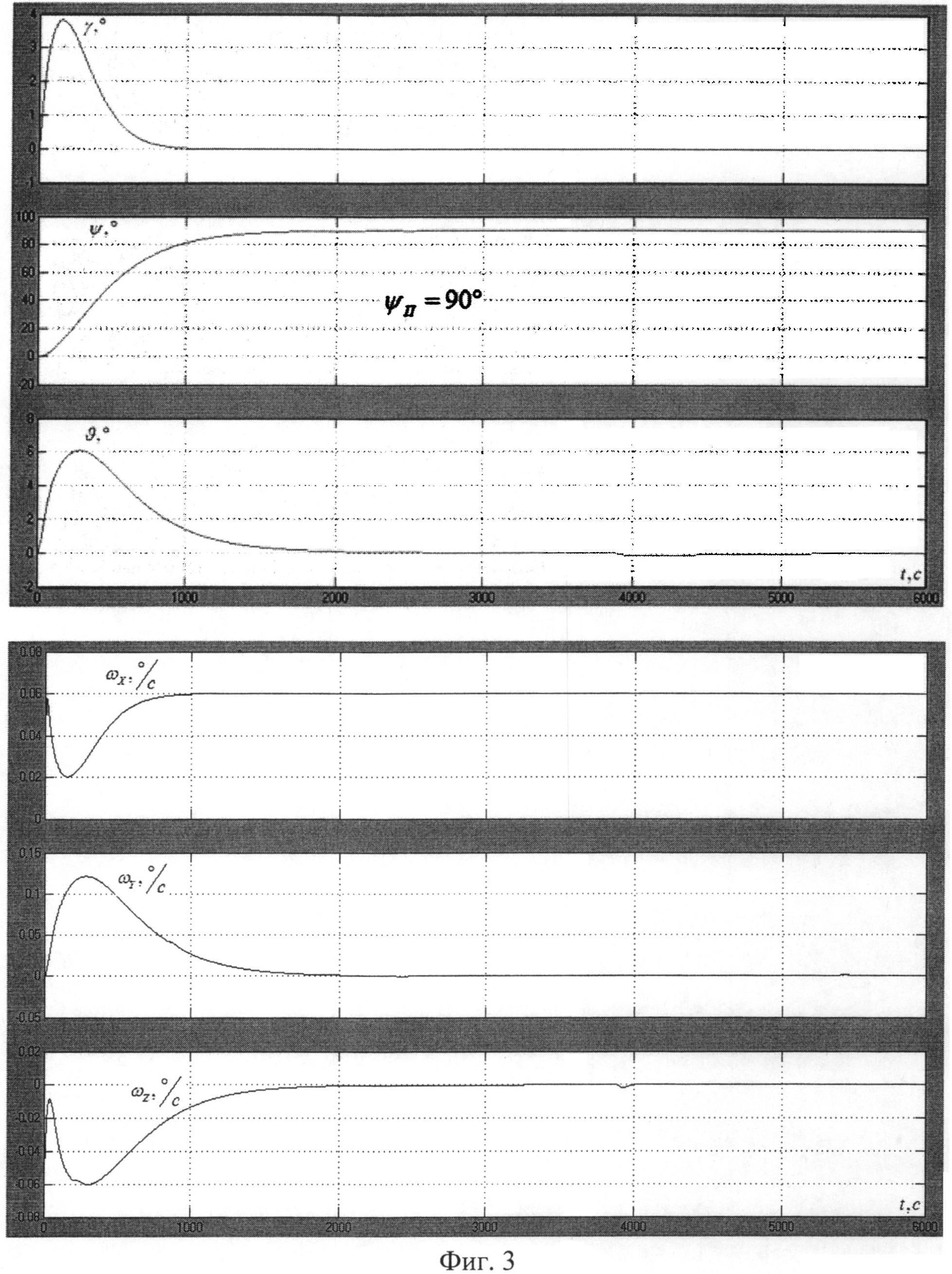
На фиг.3 показаны результаты моделирования полных уравнений движения КА при задании пространственного положения КА по курсу на 90°.
На фиг.3 обозначено:
ψП - заданное (программное) значение угла поворота КА;
γ, ψ, ϑ - углы ориентации КА относительно ОСК соответственно по крену, курсу и тангажу в процессе изменения положения КА по курсу;
ωX, ωY, ωZ - угловые скорости КА по курсу, крену и тангажу относительно ОСК.
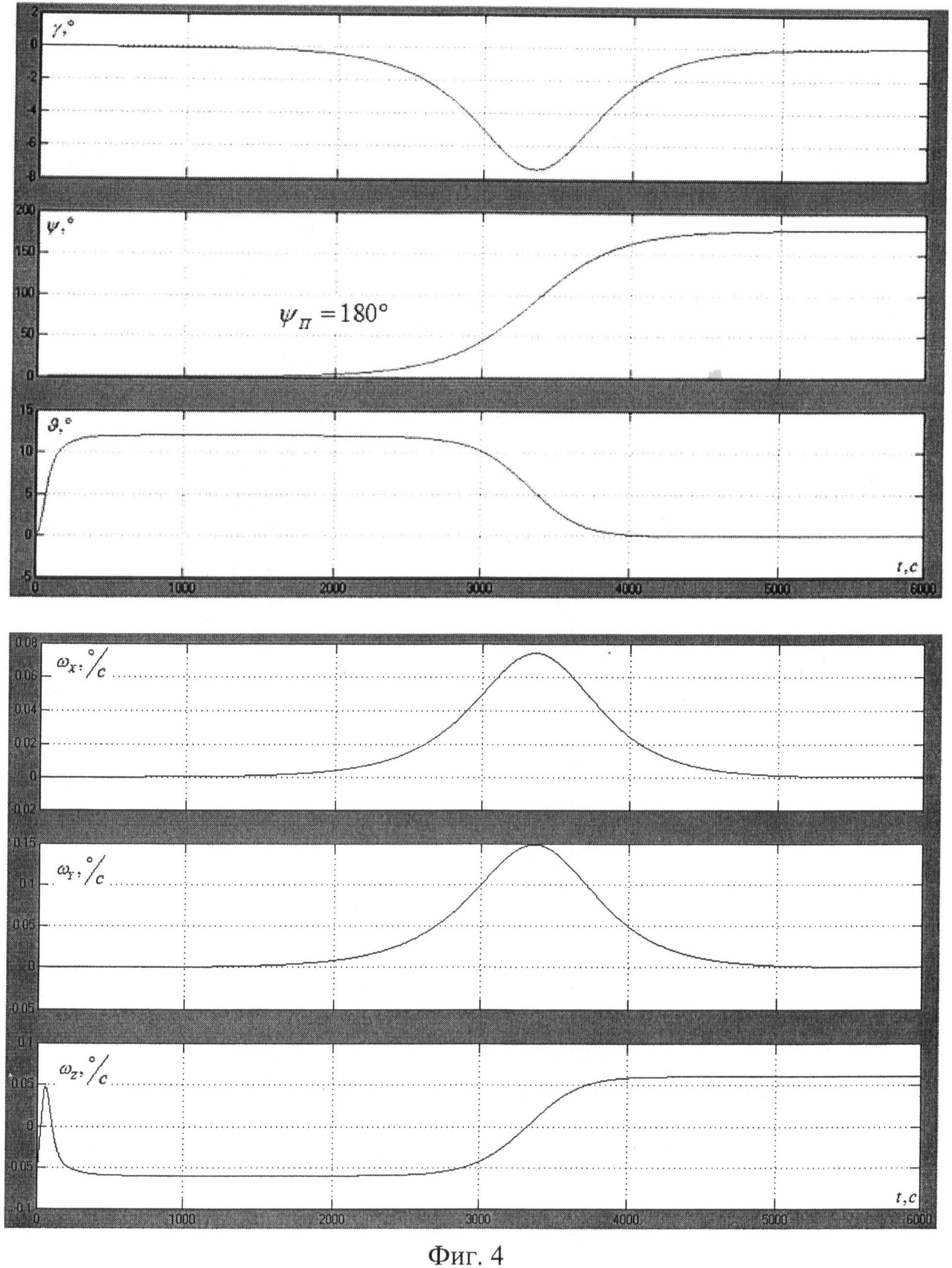
На фиг.4 показаны результаты моделирования полных уравнений движения КА при задании пространственного положения КА по курсу на 180°.
На фиг.4 обозначено:
ψП - заданное (программное) значение угла поворота КА;
γ, ψ, ϑ - углы ориентации КА относительно ОСК соответственно по крену, курсу и тангажу в процессе изменения положения КА по курсу;
ωX, ωY, ωZ - угловые скорости КА по курсу, крену и тангажу относительно ОСК.
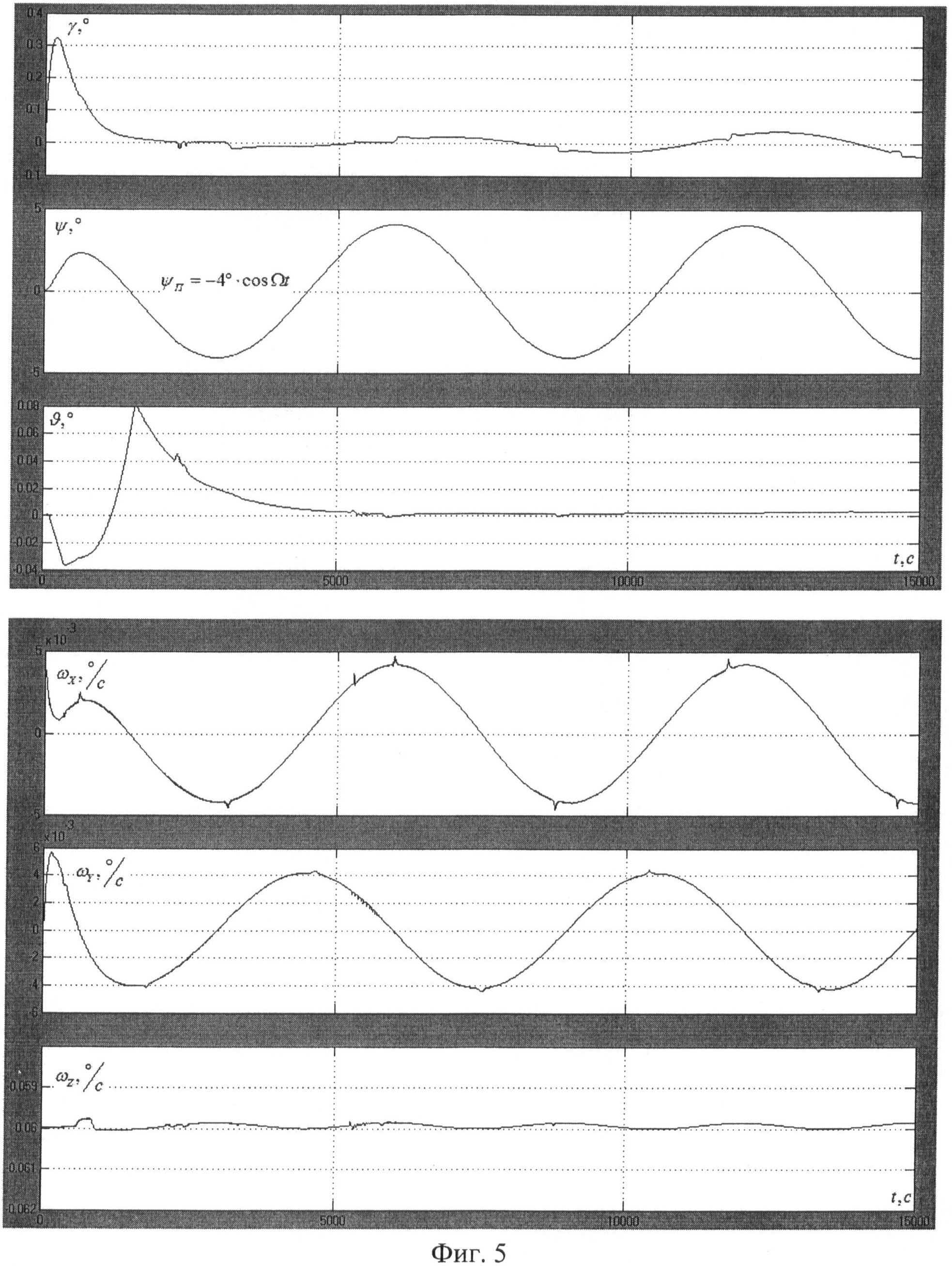
На фиг.5 показаны результаты моделирования полных уравнений движения КА при задании пространственного положения КА по курсу при отработке путевого угла: ψП=-4°sinΩt и  .
.
На фиг.5 обозначено:
ψП - заданное (программное) значение угла поворота КА;
Ω - орбитальная угловая скорость;
t - текущее время, отсчитываемое от момента прохождения восходящего узла орбиты;
γ, ψ, ϑ - углы ориентации КА относительно ОСК соответственно по крену, курсу и тангажу в процессе изменения положения КА по курсу;
ωX, ωY, ωZ - угловые скорости КА по курсу, крену и тангажу относительно ОСК.
Уравнения движения орбитального гирокомпаса в процессе управления угловым положением КА имеют вид (см. фиг.1):
 ;
;

 ;
;
ψ=α+Δα;
γ=β+Δβ;
ϑ=θ+Δθ,
где ψп - программное значение курсового положения КА относительно ОСК.
ψп, γп, ϑп - углы, определяющие положение программной системы координат (ПСК) углового положения КА относительно ОСК соответственно по курсу, крену и тангажу, в рассматриваемом изобретении γп=ϑп=0;
α, β, θ - углы ориентации приборных осей ОГК относительно ПСК соответственно по курсу, крену и тангажу.
Для более полного представления движения КА в процессе пространственного поворота приведены выражения для показаний ГИУС по крену ωX, курсу ωY и тангажу ωZ:
 ;
;
 ;
;

где γ,  , ψ,
, ψ,  , ϑ,
, ϑ,  - углы и угловые скорости КА относительно ПСК;
- углы и угловые скорости КА относительно ПСК;
Если ОГК строит ПСК без ошибок, т.е. α=ψп, θ=0, β=0, то угол курса ψ КА будет точно соответствовать программному углу курса ψП.
Работа устройства совершается следующим образом (см. фиг.1). В исходном положении устройство ориентирует КА в ОСК с использованием свойств ОГК при  . При этом сигналы ПМВ (1) по крену γПМВ и тангажу ϑПМВ сравниваются с соответствующими им выходными сигналами ОГК по крену Δβ и тангажу Δθ, усиливаются в УПБ (5, 6, 8) и поступают на сумматоры 12, 14, 16 для коррекции сигналов ГИВУС (2). Выходные сигналы сумматоров 12, 14, 16, после устранения перекрестных связей на сумматорах 13 и 14 с помощью БКВК 21 и 22, поступают на интеграторы 18, 19 и 20, выходы которых являются выходами ОГК соответственно по крену, курсу и тангажу. ОГК принимает известную структуру, соответствующую аналогу при cosψП=1, sinψП=0 и описываемую следующими уравнениями:
. При этом сигналы ПМВ (1) по крену γПМВ и тангажу ϑПМВ сравниваются с соответствующими им выходными сигналами ОГК по крену Δβ и тангажу Δθ, усиливаются в УПБ (5, 6, 8) и поступают на сумматоры 12, 14, 16 для коррекции сигналов ГИВУС (2). Выходные сигналы сумматоров 12, 14, 16, после устранения перекрестных связей на сумматорах 13 и 14 с помощью БКВК 21 и 22, поступают на интеграторы 18, 19 и 20, выходы которых являются выходами ОГК соответственно по крену, курсу и тангажу. ОГК принимает известную структуру, соответствующую аналогу при cosψП=1, sinψП=0 и описываемую следующими уравнениями:
 ;
;
 ;
;
 ;
;
ψ=α+Δα;
γ=β+Δβ;
ϑ=θ+Δθ,
где ψ, ϑ, γ - углы отклонения связанных осей КА относительно ОСК по курсу, тангажу и крену соответственно;
α, θ, β - углы приборных осей ОГК относительно ОСК по курсу, тангажу и крену соответственно.
Таким образом, в начальный период с помощью ОГК строится приборная ОСК, а КА с помощью исполнительных органов (ИО) отслеживает положение приборных осей ОГК, непрерывно устраняя относительно них ошибки стабилизации (αΔ→0, Δβ→0, Δθ→0) и, следовательно, так же ориентируется в ОСК.
Для управления пространственным положением КА по курсу из блока БЗП в блок БУП подается значение программного угла курса ψП. БУП формирует сигналы управления положением КА по курсу: -ΩsinψП,  , ΩcosψП, которые поступают на входы сумматоров соответственно 12, 14 и 16. Одновременно программный угол ψП подается на вторые входы КПУ (25-27) и СПУ (28-30) для компенсации дополнительных перекрестных связей межу каналами, возникающих при повороте КА.
, ΩcosψП, которые поступают на входы сумматоров соответственно 12, 14 и 16. Одновременно программный угол ψП подается на вторые входы КПУ (25-27) и СПУ (28-30) для компенсации дополнительных перекрестных связей межу каналами, возникающих при повороте КА.
При поступлении сигналов от БУП на выходы ГИУС (через третьи входы сумматоров 12, 14, 16) КА поворачивается по курсу на угол ψП. В процессе поворота КА начнут преобразовываться сигналы коррекции за счет введения УПБ (7), КПУ (25), СПУ (28) и сигналы компенсации перекрестных связей БКВК (21-24), а положение приборных осей ОГК относительно программной системы координат (ПСК) сохранится без изменения. В соответствии с фиг.1 уравнения ОГК примут вид:



ψ=α+Δα;
γ=β+Δβ;
ϑ=θ+Δθ,
где α, β, θ - углы ориентации приборных осей ОГК относительно программной системы координат (ПСК) соответственно по курсу, крену и тангажу.
Если ОГК строит приборную орбитальную систему координат (ПрОСК) относительно ПСК без ошибок, т.е. α=ψПР, θ=0, β=0, то угол курса КА ψ будет точно соответствовать программному значению угла курса ψП.
Примеры. Повороты КА на 45°, 90° и 180°
1. ψп=45° (фиг.2)
Уравнения движения принимают вид:



В установившемся режиме КА повернулся на 45°
2. ψп=90° (фиг.3)
Уравнения движения принимают вид:
 ;
;
 ;
;
 ;
;
таким образом, в установившемся режиме КА повернулся на 90°, ОГК сохранил ориентацию относительно ПСК, т.к. β=θ=0, α=ψПР=90°, при этом каналы крена и тангажа поменялись местами, в канале тангажа поменялся знак перед коэффициентом коррекции из-за изменения полярности сигнала ПМВ относительно ОСК при повороте КА.
3. ψп=±180° (фиг.4)
Уравнения движения принимают вид:
 ;
;
 ;
;
 ;
;
ψ=α+Δα;
γ=β+Δβ;
ϑ=θ+Δθ,
получаем ψКА=180°, в установившемся режиме β=θ=0, α=ψПР=180°, знаки перед коэффициентами коррекции поменялись из-за изменения полярности сигнала ПМВ относительно ОСК при повороте КА.
4. Ориентация КА в путевой системе координат (фиг.5)
ψПР=-A·cosΩt,  для А=4°,
для А=4°, 
Из представленных результатов видно, что путевой угол отрабатывается с высокой точностью, ошибки по крену и тангажу практически отсутствуют.
Таким образом, ОГК управляет пространственным положением КА по каналу курса в пределах 0°±360°, при этом сохраняется режим орбитального гирокомпасирования относительно программной системы координат без потери точности ориентации.
Устройство управления положением космического аппарата (КА) в пространстве с использованием орбитального гирокомпаса (ОГК), содержащее построитель местной вертикали (ПМВ), выход которого по каналу крена подключен к последовательно соединенным первому сумматору, первому усилительно-преобразовательному блоку (УПБ), второму сумматору, третьему сумматору, первому интегратору, выход которого образует выход ОГК по каналу крена, выход первого же сумматора по каналу курса подключен к последовательно соединенным второму УПБ, четвертому сумматору, пятому сумматору, второму интегратору, выход которого образует выход ОГК по каналу курса, выход ПМВ по каналу тангажа подключен к последовательно соединенным шестому сумматору, третьему УПБ, седьмому сумматору и третьему интегратору, выход которого образует выход ОГК по каналу тангажа, а также первый и второй блоки компенсации взаимовлияний каналов (БКВК) и гироскопический измеритель угловой скорости (ГИУС), при этом второй вход первого сумматора подключен к выходу первого интегратора, второй вход шестого сумматора подключен к выходу третьего интегратора, а вторые входы второго, четвертого и седьмого сумматоров подключены к выходам ГИВУС соответственно по крену, курсу и тангажу, а вторые входы третьего и пятого сумматоров подключены соответственно к выходам первого и второго БКВК, входы которых соединены с выходами второго и первого интеграторов соответственно, а также блок задания положения (БЗП) КА, отличающееся тем, что в него введены четвертый УПБ, первый, второй и третий косинусные преобразователи углов (КПУ), первый, второй и третий синусные преобразователи углов (СПУ), восьмой и девятый сумматоры, третий и четвертый БКВК, а так же блок управления положением (БУП) КА по курсу и блок задания положения (БЗП) КА по курсу, причем вход четвертого УПБ подключен к выходу шестого сумматора, а выход четвертого УПБ и выход второго УПБ подключены соответственно к первым входам первого СПУ и первого КПУ, выходы которых подключены к первому и второму входам восьмого сумматора, выход которого подключен ко второму входу четвертого сумматора, входы третьего и четвертого БКВК подключены к выходам третьего и второго интеграторов соответственно, а их выходы подключены соответственно к первым входам второго и третьего СПУ, выходы которых подключены к третьему входу пятого и второму входу девятого сумматоров соответственно, первый, второй и третий выходы БУП подключены к третьим входам соответственного второго, четвертого и седьмого сумматоров, а вход - к выходу БЗП, выход которого подключен так же ко вторым входам каждого СПУ и КПУ.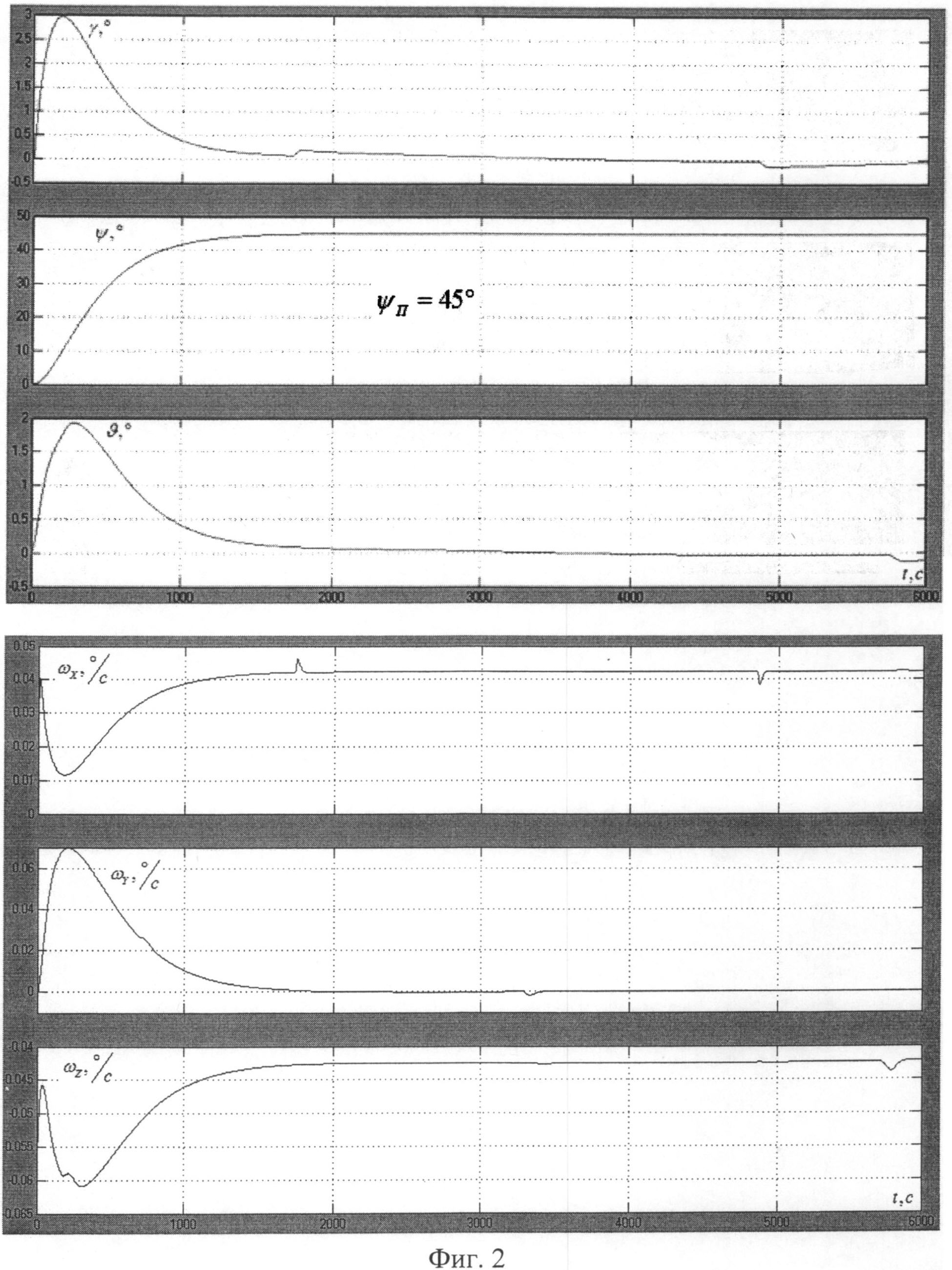
Способ обеспечения мягкой посадки летательного аппарата
Устройство для определения аэродинамических характеристик модели в сверхзвуковой аэродинамической трубе
Способ изменения режима полета воздушного судна в запретной зоне
Самоходная пусковая установка
Устройство для определения аэродинамических характеристик модели в сверхзвуковой аэродинамической трубе
Модульная многоместная корабельная пусковая установка вертикального пуска
Транспортный модуль боевой машины грунтового ракетного комплекса
Устройство для определения аэродинамических характеристик модели в сверхзвуковой аэродинамической трубе
Ракета с подводным стартом
Система восстановления курсовой ориентации космического аппарата с использованием орбитального гирокомпаса
Способ изменения режима полета воздушного судна в запретной зоне
Радиопрозрачный обтекатель бортовой антенной системы летательного аппарата
Многоразовый беспилотный летательный аппарат в транспортно-пусковом контейнере и способ старта многоразового беспилотного летательного аппарата из транспортно-пускового контейнера
Способ селекции морской цели оптико-электронной системой летательного аппарата
Способ самонаведения крылатой ракеты
Способ астроориентации орбитального космического аппарата (варианты)

