Результат интеллектуальной деятельности: СПОСОБ КОРРЕКЦИИ ОШИБОК ПРЕДСКАЗАНИЯ ЗНАЧЕНИЙ ИЗМЕНЯЮЩИХСЯ ВО ВРЕМЕНИ СИГНАЛОВ, ВОЗМУЩАЕМЫХ РАЗЛИЧНЫМИ НЕКОНТРОЛИРУЕМЫМИ СИСТЕМАТИЧЕСКИМИ ЯВЛЕНИЯМИ
Вид РИД
Изобретение
Настоящее изобретение касается способа коррекции предсказания значений изменяющихся во времени сигналов, возмущаемых различными не контролируемыми систематическими явлениями.
Навигационные сообщения, передаваемые глобальными навигационными спутниковыми системами (такими как Galileo, GPS, …) с их дополнительными системами, улучшающими целостность (EGNOS, WAAS, …), содержат также данные предсказания орбиты спутников и опорного времени. При помощи этих предсказаний пользователи этих навигационных услуг вычисляют свое положение на основании измерений псевдорасстояний.
Любая ошибка в этих предсказаниях влечет за собой ошибку в значении определяемого таким образом географического положения пользователя. В случае услуг, для которых безопасность является вопросом жизни, предусматривают сегмент контроля целостности пользователей через контроль достоверности предсказаний и передачу информации целостности (индикаторы целостности, такие как SISA/SISMA для Galileo или UDRE для EGNOS/WAAS, которая является европейским подслоем для системы GPS). Пользователи учитывают эти индикаторы, чтобы оценить риск превышения тревожного порога ошибкой, влияющей на указываемое положение. В настоящее время происходит стандартизация и сертификация этих индикаторов и алгоритмов для их применения.
Одной из основных проблем, отмечаемых всеми специалистами в области спутниковой навигации, является то, что при современных стандартах целостность измерений можно обеспечить только при обязательном математическом условии отсутствия учета систематических влияний, в частности, смещений, на распределение ошибок. В противном случае, даже если индивидуально контролировать ошибки каждого спутника через уровень мажорирования, передаваемый пользователям, результирующая ошибка на уровне пользователя может не поддаваться контролю.
Учитывая, что ширина полосы каналов передачи навигационных данных является строго ограниченной, невозможно передавать более одного параметра характеристики ошибки предсказания орбиты и синхронизатора.
Для решения этой проблемы была сделана попытка искусственного повышения индикаторов целостности, чтобы повысить уровень мажорирования распределения ошибок предсказания. Однако такое искусственное повышение существенно влияет на возможность получения сервиса целостности, так как оно влечет за собой увеличение числа ложных тревог. Поэтому возникла потребность в повышении качества коррекции данных орбиты и синхронизатора.
Ограничения, связанные с качеством предсказаний, не всегда четко определены. Причиной этого ограничения могут быть многие факторы. В частности, можно указать:
- неточность модели поля притяжения Земли,
- непринятие в расчет влияния приливов-отливов или влияния множественных тел (например, других планет солнечной системы),
- недостаточная надежность алгоритмов экстраполяции наблюдений при предсказаниях,
- нестабильность бортовых приборов генерирования навигационных сигналов,
- неточность моделирования влияния давления солнечного излучения,
- неточность данных о массе спутника, о положении его центра тяжести, …
- а также другие не идентифицированные в настоящее время факторы.
Большинство вышеперечисленных факторов либо характерны для ограничений известных решений (четыре первых), либо связаны с отклонением параметров в течение всего срока службы спутника (три последних). В настоящее время для уменьшения влияния этих факторов в основном применяют следующие решения:
- повышение точности геофизических данных, например, повышение качества моделей поля земного притяжения или приливов-отливов,
- повышение точности данных, связанных с текущим состоянием спутника,
- повышение эффективности вычислительных схем, чтобы они могли вычислять большее число данных с более высокой точностью дли итеративных процессов большей длины,
- повышение стабильности бортового оборудования (за счет температурного контроля, усовершенствования электронных схем, …).
Все эти известные решения имеют ограничения, в частности:
- точность геофизических данных можно повысить только при относительно медленном внедрении результатов научных исследований,
- точность данных, связанных с оборудованием и компонентами спутника, очень ограничена по причине очень ограниченной возможности их наблюдения после запуска спутника. Например, это касается параметров, таких как оптическая отражательная способность спутника в результате неизбежного ухудшения состояния его наружного отражающего покрытия, которое играет определяющую роль при влиянии давления солнечного излучения,
- эффективность вычислений невозможно повысить быстрее, чем характеристики интегральных схем, которые скоро достигнут своего предела, когда их миниатюризация дойдет до масштаба атома.
Настоящее изобретение призвано предложить способ коррекции предсказания значений изменяющихся во времени сигналов, возмущаемых различными не контролируемыми систематическими явлениями, который не связан вышеуказанными ограничениями и является простым в применении.
Способ в соответствии с настоящим изобретением отличается тем, что содержит следующие этапы для коррекции предсказаний параметра, включенного в принимаемый и изменяющийся во времени сигнал:
- составление хронологии ошибки предсказания на основании первого набора значений, оцениваемых апостериори в течение определенного промежутка времени с достаточной точностью (которые в дальнейшем будут называться «воспроизведенными значениями»), сравнивая эти воспроизведенные значения с набором ранее предсказанных значений для этого же определенного промежутка времени,
- анализ предсказанных временных рядов ошибок предсказания при помощи способа обработки сигнала и выделения долей систематических влияний,
- экстраполяция на новый промежуток времени предсказания поведения долей систематических влияний в течение рассматриваемого промежутка времени и коррекция предсказаний при помощи экстраполированных таких образом значений.
Настоящее изобретение будет более очевидно из нижеследующего описания варианта выполнения, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
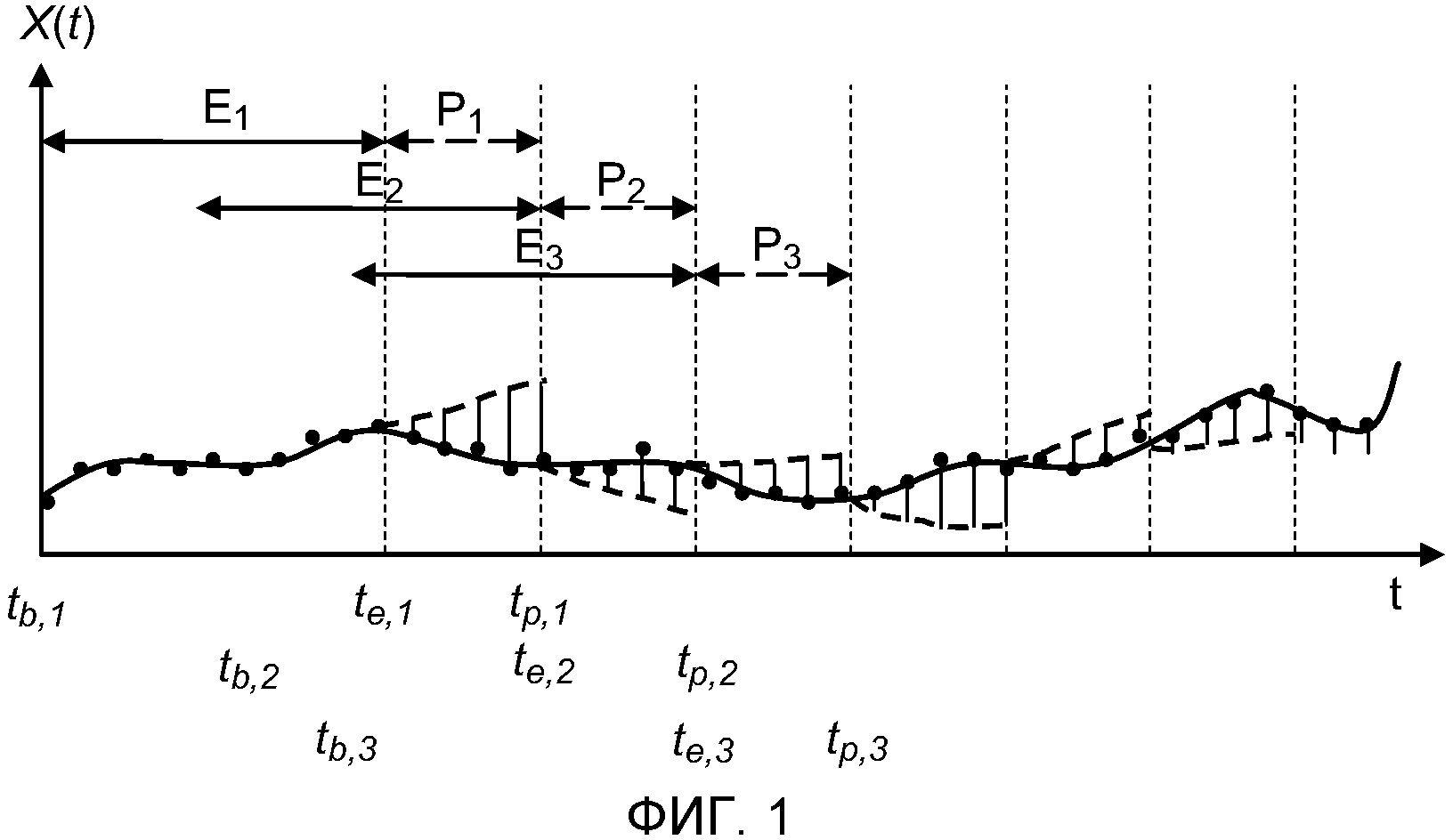
Фиг. 1 - временная диаграмма, иллюстрирующая упрощенный пример набора значений, полученных на основании принятых измерений, и соответствующих предсказанных значений, согласно заявленному способу.
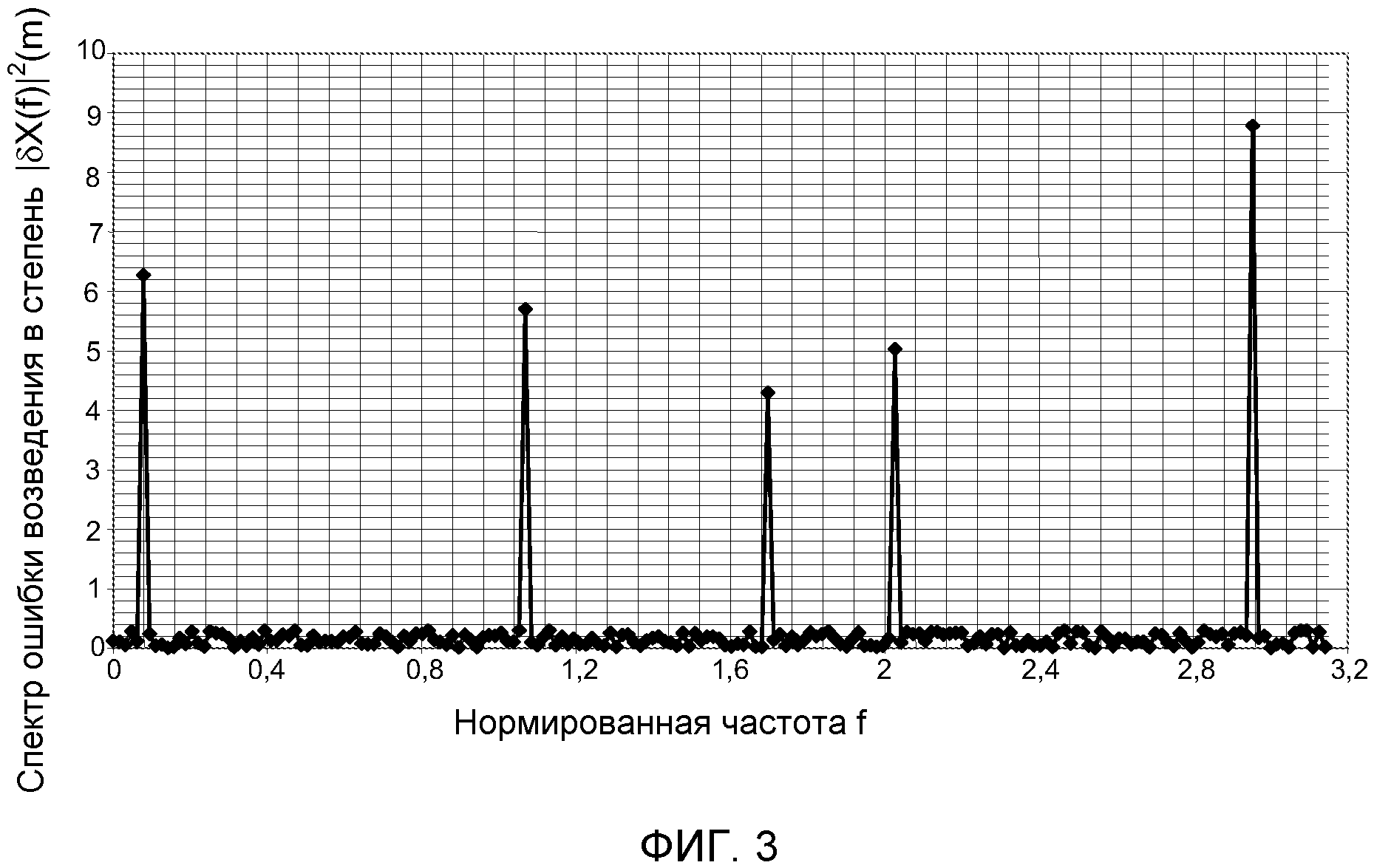
Фиг. 2 - временная диаграмма изменения ошибок предсказания на предсказанных значениях, показанных на фиг. 1.
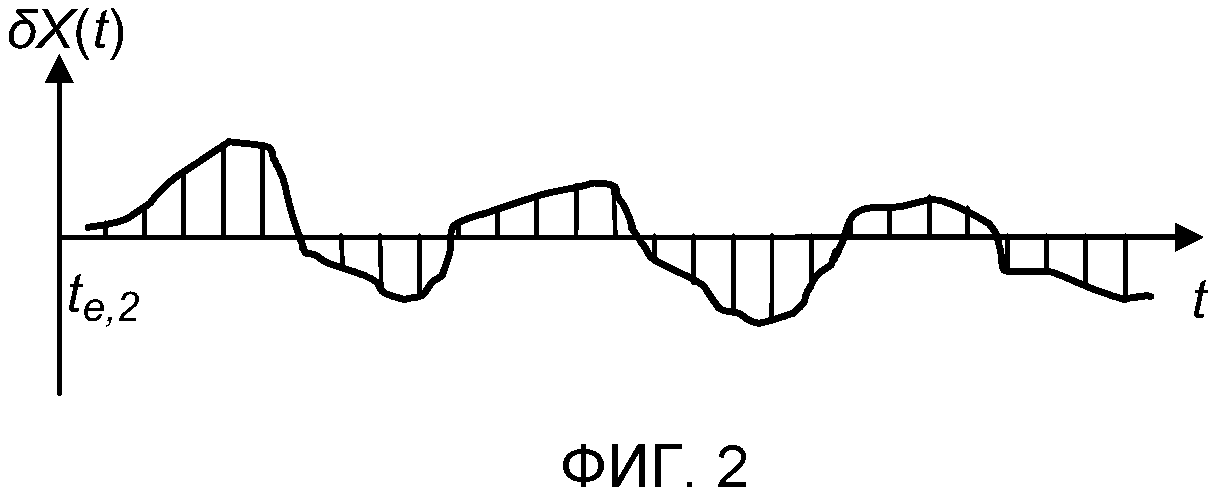
Фиг. 3 - диаграмма в плоскости Фурье, иллюстрирующая систематические влияния, приводящие к ошибкам предсказания.
Описание настоящего изобретения касается сигналов, принимаемых от радионавигационного спутника, однако, разумеется, оно не ограничивается только этим применением и может применяться для других применений, в которых принимают сигналы, которые должны изменяться во времени, по меньшей мере, частично не случайным образом и могут искажаться под влиянием различных систематических причин, и для которых располагают хронологией изменения этих искажающих сигналов.
Настоящее изобретение основано на том, что точный алгоритм предсказания орбиты работает в режиме обработки наборами (обработка большого числа последовательных значений, содержащихся в промежутке времени или «дуга»), при этом его первый этап обязательно является точной оценкой параметров положения и орбиты спутника вдоль дуги оценки, относящейся к прошлому периоду. Затем оцененные положения экстраполируют для периода предсказания, чтобы получить предсказания параметров орбиты.
В настоящем случае периоды, используемые для определения предсказаний, всегда перекрываются с одной или несколькими дугами оценки, используемыми в последних дугах обработки предсказания. Кроме того, точность воспроизведенных значений является более высокой, чем точность предсказанных значений. Сравнение (то есть их различие) этих двух видов значений является существенным для выявления ошибок предсказательного метода. Известные способы обработки сигнала можно применять для временных рядов этих различий с целью экстраполяции поведения ошибок и их коррекции, пока они не начали оказывать влияние.
Способ в соответствии с настоящим изобретением позволяет значительно уменьшить потенциальные систематические влияния (типа перечисленных выше), благодаря их наблюдению в прошлом, что приводит к распределению ошибок предсказания, намного более соответствующему требованиям норм вычисления целостности.
Способ в соответствии с настоящим изобретением применяют следующим образом.
Обозначим X(t) какой-либо параметр, зависящий от времени, который может относиться к синхронизатору или к орбите спутника. Этот параметр Х может быть либо точкой орбиты этого спутника при Х=x, y или z, которые является пространственными координатами Х, либо может быть определен как X=δt, то есть сдвиг синхронизатора спутника. Способ в соответствии с настоящим изобретением содержит следующие три основных этапа:
- оценка ошибки предсказания,
- анализ факторов, систематически влияющих на ошибку предсказания,
- коррекция предсказаний.
Далее следует более подробное описание этих этапов. Сначала производят оценку ошибки предсказания на основании двух наборов значений предсказания.
А-первый набор значений предсказания
Вычисление орбиты спутника начинается со снятия измерений на относительно длинной (чаще всего от нескольких дней до нескольких недель) дуге оценки E1=[tb,1,te,1]. Эту дугу оценки используют для оценки воспроизведенных значений, таких как значения, воспроизведенные классическими вычислительными схемами приборов построения орбиты и синхронизации параметра Х. Обозначим Xr1(t) функцию, позволяющую получать воспроизведенные значения этого параметра за промежуток времени t∈E1. Детали способа воспроизведения не являются существенными для настоящего изобретения, и необходимо только иметь Xr1(t) в течение продолжительности дуги E1. Эти воспроизведенные значения могут, кстати, быть получены из источника, отличного от схемы вычисления предсказания.
Воспроизведенные значения связаны с оценкой некоторых параметров (параметры орбиты, параметры вращения Земли, модель отражательной способности спутника, …), которые можно использовать для вычисления значений Х в моменты после te,1 (te,1 является началом Р1). Примем за Xp1(t) значения, полученные таким образом для:
t∈P1=[te,1, tp,1]
В этом выражении tp,1 является последним моментом предсказания. Эти значения Xp1(t) дают первое предсказание рассматриваемого параметра. Следует также отметить, что для изобретения детали осуществления способа предсказания не являются существенными, необходимо только иметь Xp1(t) в течение продолжительности дуги Р1.
На фиг. 1 показано изменение во времени дуг оценки (E1, E2, E3, …) и соответствующих дуг предсказания (Р1, Р2, Р3, …). На этой временной диаграмме сплошной кривой показаны воспроизведенные значения Х, тогда как сегменты пунктирных кривых относятся к предсказанным значениям Х. На фиг. 2 точки, образующие сплошную кривую, соответствуют ошибкам предсказания Х, полученным как разность между предсказанными значениями и воспроизведенными значениями Х в одни и те же моменты.
В-второй набор значений предсказания
Для следующего набора значений предсказания орбиты повторяют предыдущие операции для второй дуги оценки E2=[tb,1, te,2] при te,2≤tp,1. Кроме того, в большинстве случае tb,2≤te,1, потому что дуги оценки должны быть длиннее, чем дуги предсказания, чтобы обеспечить лучшее качество предсказания, и тогда получаем Р1⊂Е2. Как правило, но не ограничительно в настоящем применении эти дуги оценки могут длиться от 1 часа до 48 часов. Измерения, производимые во время промежутка времени Е2, позволяют получить набор воспроизведенных значений параметров орбиты или синхронизации Xr,2(t), соответствующих этому периоду Е2, которые можно распространить в течение периода Р2=[te,2, tp,2] и получить для этого периода предсказания орбиты или синхронизатора Xp,2(t).
Следует отметить, что для промежутка времени Р1 имеются в наличии два значения Х, поскольку Р1⊂Е2, то есть Xp,1(t) и Xr,2(t) для [te,1, tp,1]. Учитывая, что оба значения Xp,1 и Xr,2 являются приближениями одного и того же параметра орбиты или синхронизатора в одни и те же моменты, но с более высокой точностью для Xr,2, чем для Xp,1, получают приближение ошибки предсказания для промежутка времени Р1 при помощи:
δX(t)=Xp,1(t)-Xr,2(t) для [te,1, tp,1] (1)
(1)
Для следующих наборов предсказания так же, как получили δX(t), сравнивая предсказание Х в первом наборе с его воспроизведением во втором наборе, можно получить оценку ошибки предсказания для набора n, сравнив предсказание Xp,n(t) для этого набора n с воспроизведением Xr,n+1(t):
δX(t)=Xp,n(t)-Xr,n+1(t) для [te,n, tp,n]
(2)
Эта последовательность наборов оценки и предсказания, а также функция оценки ошибки предсказания δX(t) показаны на фиг. 2.
Таким образом, первый основной этап способа в соответствии с настоящим изобретением состоит, для набора n+1 значений предсказания, в построении временного ряда δX(t) ошибок предсказания для каждого параметра Х орбиты или синхронизатора путем сравнения воспроизведенных значений имеющихся в наличии наборов с предсказанными значениями предыдущего(их) набора(ов).
Следующий этап способа в соответствии с настоящим изобретением состоит в выделении систематических влияний в ошибке предсказания. Временные ряды ошибок предсказания, полученные при помощи функции δX(t) и упрощенно показанные на фиг. 2, содержат всю информацию, касающуюся ошибки предсказания. Если бы эта ошибка предсказания появилась только в результате ошибок измерения, кривая, характеризующая δX(t), претерпевала бы случайное изменение. В большинстве случаев это не соответствует реальности, и, например, путем вейвлетного анализа или при помощи анализа Фурье временных рядов ошибок предсказания, как показано на фиг. 3, выявляют характеристики этих временных рядов ошибок, которые ясно показывают, что речь не идет о чисто случайном изменении. Эти характеристики соответствуют систематическим ошибкам, влияющим на процесс предсказания, и они связаны с присутствием ошибок в модели, используемой для предсказания самой орбиты, или с ограничениями процесса предсказания.
На фиг. 3 показана диаграмма примера анализа Фурье, на которой представлен спектр ошибки при возведении в степень |δX(t)|2 в зависимости от нормированной частоты f. В этом примере составляющие спектра, значение которых намного больше среднего значения спектра (на диаграмме показаны пять узких импульсов), можно отнести к систематическим влияниям. В случае анализа Фурье эти составляющие соответствуют долям δXS,i(t)=A(i)jωi(t) для разных существенных значений ω(i) в рассматриваемом спектре.
Таким образом, второй основной этап способа в соответствии с настоящим изобретением состоит в анализе временных рядов ошибок предсказания при помощи соответствующего метода обработки сигнала (анализ Фурье, вейвлетный анализ или другие методы обработки сигнала) и в выделении долей систематических влияний δXS,t(t).
Следующий этап состоит в осуществлении предсказания и коррекции систематических ошибок предсказания. После идентификации долей δXS,t(t) систематических влияний можно относительно просто экстраполировать их временное поведение на будущий промежуток времени предсказания Pn+1. Таким образом, эти доли можно использовать для коррекции предсказаний в наборе предсказания n+1 путем вычитания различных долей из значений функции δXS,t(t).
Таким образом, третий основной этап способа в соответствии с настоящим изобретением состоит в экстраполяции поведения долей систематических влияний δXS,t(t) в рассматриваемом интервале предсказания и в коррекции предсказаний между этими значениями долей.
Следует отметить, что способ в соответствии с настоящим изобретением можно осуществлять для скорректированных или не скорректированных предсказаний. С другой стороны, дуги предсказания (соответствующие промежуткам времени Р1, Р2, Р3, показанным на фиг. 1) предпочтительно перекрывают друг друга, хотя это и не обязательно.
Устройство развертывания и свертывания гибкой конструкции, гибкая развертываемая конструкция и спутник, оборудованные таким устройством
Способ и устройство определения потребности для системы автоматического пилотирования летательного аппарата
Способы передачи и приема данных между терминалом и шлюзом, в частности посредством спутниковой связи
Спутниковое приемно-передающее устройство с высоким коэффициентом ослабления многонаправленности, ретранслятор и спутник, оборудованные таким устройством
Система и способ для определения ошибки местоположения приемного устройства спутниковой локализации
Устройство и способ для содействия реконфигурации летательного аппарата, летательный аппарат, включающий в себя такое устройство
Устройство и способ усиления сигналов радиосвязи
Способ определения закона наведения для уклонения от препятствия летательным аппаратом, электронная система и летательный аппарат
Блок из двух антенн с двойными рефлекторами, установленных на общей опоре, и спутник, содержащий такой блок
Модульное электронное устройство для работы в суровых условиях
Дальнометрия малоразмерных целей с большой дальностью действия
Устройство развертывания и свертывания гибкой конструкции, гибкая развертываемая конструкция и спутник, оборудованные таким устройством
Система и способ для определения ошибки местоположения приемного устройства спутниковой локализации

