Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОШИБКИ МЕСТОПОЛОЖЕНИЯ ПРИЕМНОГО УСТРОЙСТВА СПУТНИКОВОЙ ЛОКАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области спутниковой локализации. В частности, оно относится к определению ошибки позиционирования, что делает приемник, используя систему спутниковой локализации. Эти системы, например, применяются в системах повышения точности определения местоположения, предоставляемого GPS (английский акроним от «Global Positionning System» или systиme de localisation mondial на французском). Эти системы также известны как системы повышения качества определения местоположения. Они также известны под английской аббревиатурой SBAS от «Satellite-Based Augmentation Systems». Также известна система, известная под английской аббревиатурой EGNOS, от «European Geostationary Navigation Overlay Service» или Европейская геостационарная служба навигационного покрытия, как система для улучшения функционирования GPS.
Знание этой ошибки позиционирования приемника позволяет определить объем, для которого вероятность присутствия приемника больше порогового значения, установленного стандартом. Таким образом, знание этого объема позволяет, например, определить минимальное расстояние, на котором два самолета не должны сближаться. Знание этой информации особенно необходимо для служб целостности. Службой целостности называется способность системы предоставить предупреждение пилоту, когда навигационная система не может использоваться с требуемой эффективностью с точки зрения риска для пользователя.
Эти системы определения ошибок можно использовать, например, в летательных аппаратах, но также и в наземных транспортных средствах или кораблях.
В предшествующем уровне техники известны системы, в которых репрезентативная информация, местоположений спутников и время пересечения ионосферы, а также как репрезентативная информация ошибки этих местоположений и время прохождения, передается различным приемникам. Знание этой информации позволяет определить ошибку местоположения приемника, также говорят о целостности местоположения объекта, локализованного приемником.
Известно в данной области, что репрезентативная информация ошибок является допустимым типичным отклонением (σi) распределений допущенных ошибок. Таким образом, распределение ошибок моделируется по центрированному закону Гаусса, вида N (0, σi2). Тем не менее, моделирование распределения ошибок в виде центрированного закона Гаусса является слишком грубым и приводит к необходимости взятия запаса надежности, который в некоторых случаях является слишком большим. Это, в частности, случай, когда совокупность допустимых типовых отклонений (σi), ошибки местоположения каждого используемого спутника, должна быть низкой, чтобы позволить достаточную точность для осуществления маневров, подлежащих исполнению. В таких случаях допуск, взятый для покрытия отсутствия адаптации модели, основанной на центрированных гауссовых функциях, очень часто делает службу непригодной для использования. Кроме того, было показано, что использование центрированных гауссовых функций не корректно с математической точки зрения, если можно предположить, что ошибки распределены одномодально и симметрично, что в целом ничего не гарантирует.
Настоящее изобретение направлено на устранение этих проблем путем предложения системы для определения ошибки местоположения приемника, точность которого увеличена по отношению к точности систем, основывающихся на обмене допустимыми типовыми отклонениями распределения ошибки местоположения спутников.
Предлагается в соответствии с аспектом настоящего изобретения система для определения распределения погрешности местоположения приемника сигналов локализации. Сигналы посылаются по меньшей мере одним спутником. Система включает в себя:
- приемник, местоположение которого называется первым местоположением и подвержено влиянию ошибки, называемой первой ошибкой, имеющей распределение, называемое первым распределением;
- первое устройство определения по меньшей мере одного местоположения спутника либо каждого спутника, либо по меньшей мере одного спутника, называемого вторым местоположением;
- устройство передачи указанного или каждого или по меньшей мере одного второго местоположения первого устройства определения к приемнику.
Система отличается тем, что
- первое распределение определяется по меньшей мере первым полуинвариантом порядка более чем 2,
- первое устройство дополнительно выполнено с возможностью определения по меньшей мере одного второго полуинварианта порядка выше чем 2, представляющего второе распределение второй ошибки на втором местоположении,
- устройство передачи дополнительно приспособлено для передачи второго полуинварианта, либо каждого второго полуинварианта, либо по меньшей мере одного второго полуинварианта первого устройства определения к приемнику,
и тем, что приемник включает в себя:
- второе устройство определения полуинварианта или каждого полуинварианта, или по меньшей мере одного первого полуинварианта, на основании второго местоположения, второго полуинварианта и модели определения первого местоположения приемника на основании расстояний между приемником и спутником или спутниками и
- третье устройство определения первого распределения, на основании указанного первого полуинварианта.
Первые и вторые полуинварианты более высокого порядка чем два, можно назвать выражением «серия полуинвариантов или совокупность полуинвариантов».
Полуинварианты кn случайной переменной X определяются с помощью производящей функции полуинвариантов g(t):
В этом уравнении  представляет математическое ожидание случайной переменной X и кn полуинвариант порядка n.
представляет математическое ожидание случайной переменной X и кn полуинвариант порядка n.
Таким образом, система позволяет передачу приемникам спутниковых сигналов информации, представляющей распределение ошибки местоположения спутника. Кроме того, использование этой информации позволяет определить ошибку позиционирования, что делает приемник с использованием системы спутниковой локализации.
Кроме того, использование полуинвариантов позволяет передать пользователям информацию, представляющую распределение ошибки местоположения спутника, которая является более точной, чем в случае систем, известных из предшествующего уровня техники. Использование этих полуинвариантов избавляет от необходимости принятия стольких допусков местоположения и это по двум причинам:
- оно позволяет описать более точно распределения ошибки позиционирования/синхронизации источников сигналов позиционирования, и, таким образом, позволяет повысить точность информации локализации, вычисленной приемным устройством. Допустимая зона для риска целостности может быть меньше, чем в существующих решениях;
- оно позволяет не иметь дела с гипотезой, математическая основа которой является ложной и которая состоит в моделировании совершенных ошибок для местоположения каждого спутника с помощью сочетания центрированных N(0, σi2) гауссовых функций, тогда как распределение не является одномодальным или симметричным.
Другими словами, форма распределения, допускаемая изобретением, является гораздо более точной, чем центрированное гауссовское распределение. Тем не менее, эта общая форма может быть описана всего несколькими параметрами, полуинвариантами. Поэтому можно передать гораздо более подробную информацию о распределении вероятностей вторых ошибок позиционирования спутников.
Эта точная информация затем позволяет смоделировать первые ошибки местоположения приемника наиболее точным образом. Таким образом, нет необходимости принимать крупные допуски безопасности для обеспечения надежности, а также можно использовать систему локализации для осуществления операций, в которых требование к точности значительно.
В соответствии с технической характеристикой второе устройство определения выполнено с возможностью применения модели ко второму полуинварианту или вторым полуинвариантам.
В соответствии с технической характеристикой первое устройство определения дополнительно выполнено с возможностью определения вторых полуинвариантов порядка от 1 до 5, и в котором второе устройство определения дополнительно выполнено с возможностью определения первых полуинвариантов порядка от 1 до 5.
Чем больше полуинвариантов, тем точнее будет моделирование, но они являются более сложными, для экспериментального измерения.
В соответствии с технической особенностью третье устройство дополнительно выполнено с возможностью использования разложения Эджворта.
Настоящее изобретение также относится к способу определения распределения ошибки местоположения приемника сигналов локализации, сигналы посылаются по меньшей мере одним спутником. Способ включает в себя:
- этап приема, приемником, сигналов спутниковой локализации, местоположение приемника, названное первым местоположением и подверженное влиянию ошибки, называемой первой ошибкой, представляющей распределение, называемое первым распределением,
- первый этап определения, посредством первого устройства определения по меньшей мере одного местоположения спутника или каждого спутника, или по меньшей мере одного спутника, называемого вторым местоположением,
- этап передачи передающим устройством второго местоположения, или каждого второго местоположения, или по меньшей мере одного второго местоположения первого устройства определения к приемнику,
Способ отличается тем, что
- первое распределение определяют по меньшей мере первым полуинвариантом порядка более чем 2,
- первый этап определения дополнительно приспособлен для определения по меньшей мере второго полуинварианта, порядка более чем 2, представляющего второе распределение второй ошибки на втором местоположении,
- этап передачи дополнительно приспособлен для передачи второго полуинварианта или каждого второго полуинварианта или по меньшей мере одного второго полуинварианта, связанного с указанным вторым местоположением первого устройства определения, к приемнику,
способ дополнительно включает в себя:
- второй этап определения, посредством второго устройства определения указанного приемника, первого полуинварианта или каждого первого полуинварианта или по меньшей мере одного первого полуинварианта, на основании второго местоположения, второго полуинварианта и модели определения первого местоположения приемника, на основании расстояний между приемником и спутником или спутниками, и
- третий этап определения, с помощью третьего устройства определения приемника, первого распределения, на основании первого полуинварианта.
Согласно технической характеристике второй этап определения приспособлен для применения модели ко второму или вторым полуинвариантам.
В соответствии с технической характеристикой первый этап определения дополнительно приспособлен для определения вторых полуинвариантов порядка от 1 до 5, и в котором второй этап определения дополнительно приспособлен для определения первых полуинвариантов порядка от 1 до 5,
Согласно технической характеристике третий этап определения дополнительно приспособлен для использования разложения Эджворта.
Изобретение будет более понятным, и другие преимущества станут очевидными при прочтении подробного описания, приведенного в качестве неограничивающего примера. Это подробное описание сделано при помощи фиг. 1, на которой показан первый вариант осуществления системы, представленной в данном изобретении.
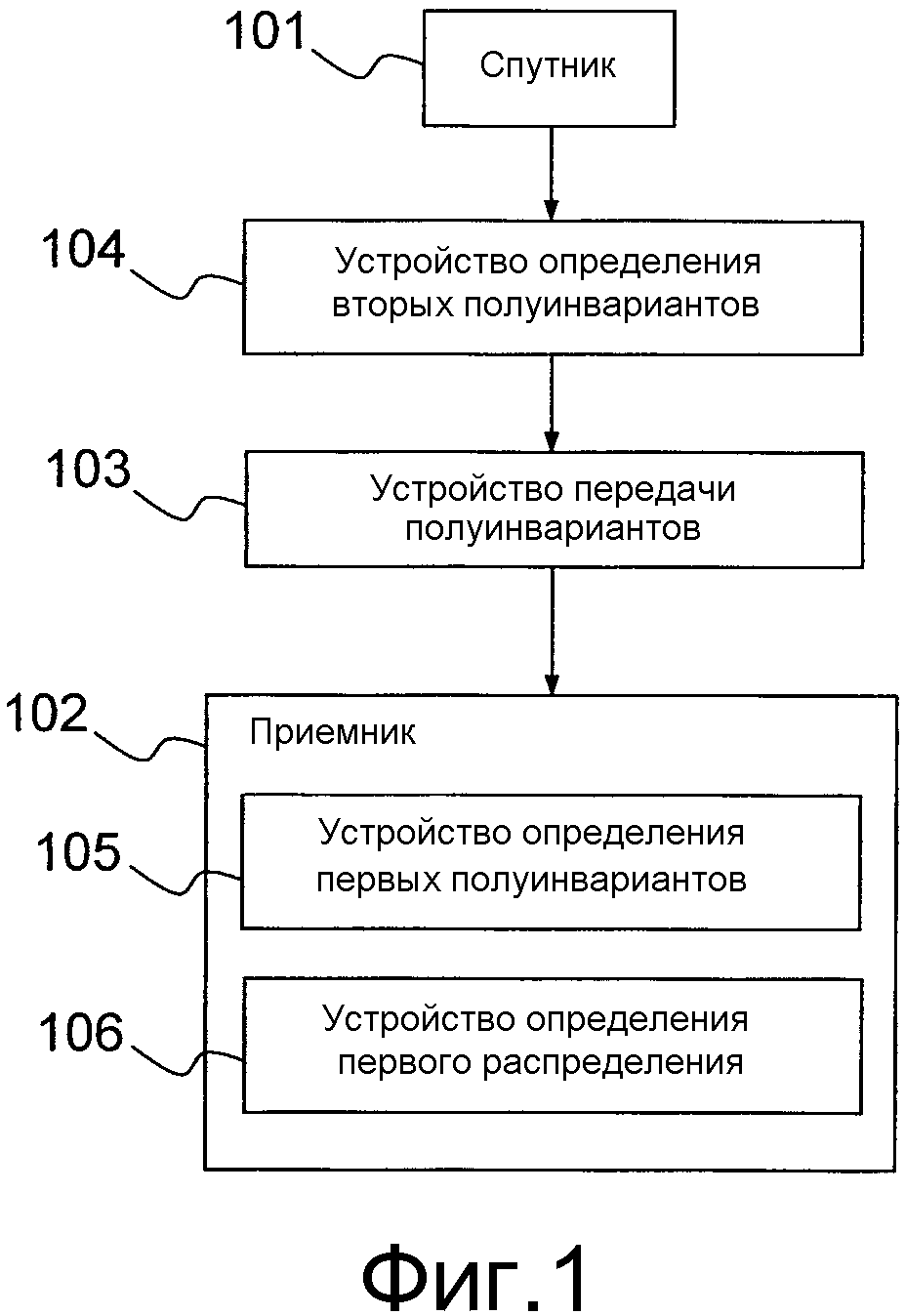
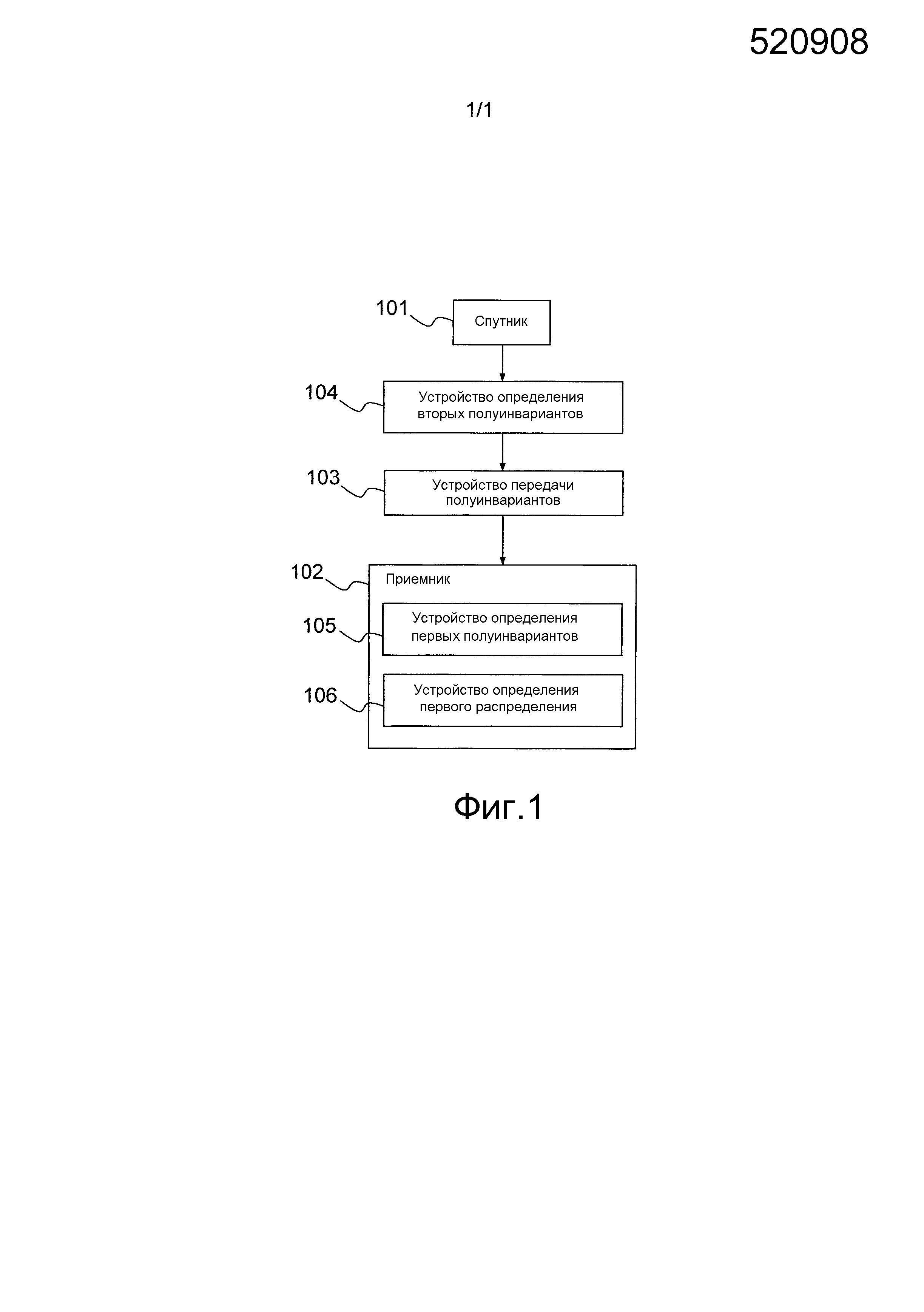
Фиг. 1 представляет систему, содержащую спутник 101 и приемник 102 спутниковых сигналов. Система позволяет приемнику определить распределение первой ошибки, связанной с первым местоположением приемника. Это первое распределение первой ошибки моделируется с помощью по меньшей мере первой совокупности полуинвариантов порядка более чем два.
Система позволяет, чтобы осуществлять это определение, передачу (через передающее устройство 103) вторых полуинвариантов, которые представляют второе распределение, представляющее вторую ошибку, связанную со вторым местоположением спутника. Определение этих элементов выполняется посредством первого устройства 104 определения.
Первые полуинварианты определяются приемником с помощью второго устройства 105 определения.
Наконец, третье устройство 106 позволяет определение первого распределения, на основании первых полуинвариантов.
Это моделирование основано на использовании разложения Эджворта плотности вероятности ошибки, связанной с местоположением спутника.
Полуинварианты случайной переменной X, распределенной по плотности вероятности f (примечание X~f) , определены путем введения функции 
- е представляет экспоненциальную функцию;
-  представляет среднее значений X;
представляет среднее значений X;
- i - мнимая единица (i2=-1).
Отметим, что разложением этой функции, в зависимости от степени экспоненты, является ряд, который включает в себя моменты порядка n,  .
.
Кроме того, можно выполнить разложение функции  , тогда получим набор коэффициентов
, тогда получим набор коэффициентов  , что определяют следующим образом:
, что определяют следующим образом:
Каждый так определенный является полуинвариантом порядка n распределения f. Первые два полуинварианта представляют собой среднее и дисперсию распределения.
Более того, если X и Y являются двумя случайными переменными, распределенными в зависимости от f и g соответственно, и чьи полуинварианты порядка n являются соответственно кn[f] и кn[g], тогда полуинварианты порядка n распределения h, связанного со случайной переменной Z=pX+qY, задаются следующим образом:

Кроме того, известно, что любое распределение, которое является результатом сочетания m случайных переменных, может быть представлено в виде разложения, известного под названием разложения Эджворта и имеющего следующий вид:
В этом уравнении следующие переменные:
- Ψ(x) является опорной функцией на выбор (например, функцией Гаусса);
- кр является полуинвариантом, порядка p, распределения ошибок орбиты и/или часов;
- Pj является многочленом порядка 3j от x, который включает в себя j первых кр в его коэффициентах и выражение которого зависит от выбора Ψ(x);
- n представляет количество переменных, объединенных для получения x.
Кроме того, известно, что это разложение сходится при n стремящемся к∞.
Опираясь на вышеописанные математические понятия, изобретение обеспечивает определение первой ошибки местоположения приемника следующим образом:
- передающее устройство 103 предоставляет информацию о распределении ошибок местоположения и синхронизации спутников в виде полуинвариантов порядка выше чем два этого распределения. Эта передача осуществляется для каждого из Ns источников сигнала позиционирования (например, спутников, передающих сигнал в соответствии со стандартом GPS);
- приемник определяет свое местоположение и опорное время, используя линейную комбинацию измерений (псевдо-)расстояний ρj между его антенной и Ns источниками сигнала, используемыми для позиционирования;
- приемник определяет m первых полуинвариантов (Kn) первого распределения ошибки, связанной с его позицией, на основании переданных полуинвариантов Ki,j, используя следующее уравнение:
где n=1, …, m представляет порядок полуинварианта, j - спутник, Mp,j - коэффициент p,j матрицы, которая позволяет определить второе местоположение приемника на основании расстояний между приемником и спутниками, p представляет направление (x, y или z), для которого определен полуинвариант.
В одном варианте осуществления можно использовать метод наименьших квадратов для определения матрицы Mp,j. В этом варианте осуществления вектор расстояний между приемником и спутниками может быть смоделирован следующим образом:
ρ=Ĝ X+ε
В этом уравнении  является вектором расстояний между приемником и спутниками,
является вектором расстояний между приемником и спутниками,  является вектором ошибок расстояний между приемником и спутниками, и X=[х, у, г, Δtusr] является вектором второго местоположения и смещения часов приемника и
является вектором ошибок расстояний между приемником и спутниками, и X=[х, у, г, Δtusr] является вектором второго местоположения и смещения часов приемника и
является матрицей наблюдения задачи. В матрице Ĝ c является скоростью света, а exej является косинусом угла между вектором в направлении х и вектором к спутнику j.
Используя метод наименьших квадратов, отношение между вторым местоположением приемника и расстояниями между приемником и спутниками может быть записано Xest=(ĜtĈ-1 Ĝ)-1 ĜtĈ-1ρ.
В этом уравнении Ĉ=<ε εt> является матрицей корреляции ошибок. Тогда, можно определить в этом осуществлении, что M=(ĜtĈ-1 Ĝ)-1 ĜtĈ-1.
- Используя разложение Эджворта, усеченное на порядке m, которое включает в себя первые полуинварианты Kn, определяют первое распределение F, которое аппроксимирует распределение первой ошибки, связанное с позиционированием приемника.
И наконец, это распределение первой ошибки может быть использовано для определения размера доверительной области (то есть области, в которой вероятность нахождения приемника больше или равна определенному порогу). Можно найти эту доверительную область решением следующего уравнения.
Это определение должно быть осуществлено для каждого направления пространства (вертикального, горизонтального). PHMI представляет собой допустимую вероятность нецелостности для того, чтобы гарантировать, что эти Rp меньше размеров допустимой области (например, радиуса тревоги, используемого в гражданской навигации).
Также можно непосредственно найти риск нахождения за пределами требуемой допустимой области (Ra); для этого можно использовать следующую формулу:
Система, такая как представлена в данном изобретении, требует определенных предварительных условий перед использованием. В частности, необходимо, чтобы:
- порядок разложения, используемого для определения первого распределения, должен быть известен заранее приемником и спутником или спутниками;
- расчет вторых полуинвариантов должен осуществляться так, что уровень доверия их оценки согласовался с требованием вероятности нецелостности, необходимой в глобальной системе. Также необходимо, чтобы результирующая аппроксимация оставалась консервативной; другими словами, можно быть уверенными, что полуинварианты не недооценены;
- и наконец, необходимо, чтобы опорная функция Ψ(x) также была заранее известна спутнику и приемнику.
В другом варианте осуществления системы последняя использует знание полуинвариантов порядка вплоть до 4 или 5, связанных с ошибкой местоположения каждого спутника и/или с ошибкой о времени пересечения слоя ионосферы сигналом от каждого спутника.
Это вычисление распределения ошибок основано на сочетании статистических калибровок, которые выполняются в течение длительного долгосрочного периода и вкладов, поступающих в течение короткого периода. Последние более динамичные и основываются, например, на наблюдении расчетов местоположения/синхронизации/ионосферной задержки.
Передача полуинвариантов к приемникам производится с помощью сигнального устройства и/или с обновлением значений полуинвариантов в случае, если они оказываются не соответствующими потребностям целостности после изменения состояния системы.
Распределение первых ошибок производится с использованием переданных полуинвариантов и с моделированием опорной функции Ψ с помощью центрированной гауссовой функцией, по первому полуинварианту порядка 1 и по ширине первого полуинварианта порядка 2.
Затем можно оценить возможность использования услуги и, таким образом, область, в которой вероятность присутствия приемника превышает пороговое значение, используя описанные выше уравнения.
Первое устройство 104 определения местоположений спутника или спутников может быть расположено на земле или на спутниках.
Различные устройства определения, описанные в данном изобретении, могут быть компьютерами или устройствами обработки данных, запрограммированные для выполнения различных операций, выполняемых устройствами. Кроме того, можно использовать специальные компоненты, программируемые логические схемы, программируемые вентильные матрицы (также известные под английской аббревиатурой FPGA, от Field-Programmable Gate Array) или интегральные схемы специального назначения (также известные под английской аббревиатурой ASIC, от Application-Specific Integrated Circuit), запрограммированные для выполнения различных операций, выполняемых устройствами.
Настоящее изобретение также может быть реализовано аппаратными и программными средствами. Оно может быть представлено в виде компьютерного программного продукта на машиночитаемом носителе. Носитель может быть электронным, магнитным, оптическим, электромагнитным или быть передающим носителем инфракрасного типа. Такими носителями являются, например, полупроводниковая память (Память с произвольным доступом RAM, ROM Read-Only Memory), ленты, дискеты или диски, магнитные или оптические (Compact Disk - Read Only Memory (CD-ROM), Compact Disk - Read/Write (CD-R/W) и DVD).
Герметичное направляющее устройство вращения
Устройство измерения дефектов устройства формирования изображений с двумя оптоэлектронными датчиками
Сборная конструкция строительной панели для улучшения сопротивления конструкции термическому расширению и способ ее изготовления
Устройство радиального усиления мощности с компенсацией фазового разброса усилительных каналов
Способ активной деформации аэродинамического профиля
Планарный излучающий элемент с дуальной поляризацией и антенная решетка, содержащая такой излучающий элемент
Способ позиционирования зеркал трехосного лазерного гирометра, в частности, при запуске лазерного гирометра
Сеть и способ расчета ионосферных коррекций
Многополосное устройство для соединения и разделения передачи и приема с широкой частотной полосой типа омт для сверхвысокочастотных телекоммуникационных антенн
Конструкция оптической накачки
Способ защиты пользователя радионавигационного приемника по отношению к аберрантным измерениям псевдорасстояний
Способ коррекции ошибок предсказания значений изменяющихся во времени сигналов, возмущаемых различными неконтролируемыми систематическими явлениями
Адаптивный способ для оценки электронного содержания ионосферы

