Результат интеллектуальной деятельности: ТЕХНОЛОГИЯ УТОЧНЕННОГО ПОЗИЦИОНИРОВАНИЯ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ МОБИЛЬНОГО ПОЛИГОНА
Вид РИД
Изобретение
Предлагаемое изобретение относится к технологии натурных испытаний подводных объектов с целью слежения и получения в темпе текущего времени информации о траектории, ориентации, параметрах ходкости, силовом воздействии на испытуемый объект водной среды или других объектов, о параметрах функционирования любых его внутренних систем и агрегатов и передачи этой информации в темпе текущего времени на обеспечивающее судно или береговой пост наблюдения, находящийся на большом удалении от места проведения испытаний, и с возможностью в любой момент прекратить функционирование объекта или изменить режим его движения.
Испытуемые подводные объекты могут попадать в навигационное пространство мобильного полигона, стартуя как из подводных и надводных носителей, так и приводняясь с воздушных носителей.
В основе решения поставленных задач лежит обеспечение повышенной точности позиционирования подводного объекта, позволяющее восстановить полный набор кинематических параметров движения объекта.
Для повышения точности позиционирования подводных объектов известны технические решения, основанные на использовании избыточного числа траекторных определений различными навигационными средствами в рамках технологии слияния инерциальных и гидроакустических измерений.
Наиболее полное представление этих решений приводится в монографии «Автономные подводные роботы: системы и технологии», авторы М.Д.Агеев, Л.В.Киселев, Ю.В.Матвиенко и др., под общей редакцией М.Д. Агеева, Институт проблем морских технологий, М., Наука, 2005 год.
В указанной работе в навигационном комплексе ИПМТ ДВО РАН (стр.157-160) позиционирование автономных необитаемых подводных аппаратов (АНПА) решается комплексированием данных гидроакустической навигационной системы с длинной базой (ГАНС-ДБ) и гидроакустической навигационной системы с ультракороткой базой (ГАНС-УКБ) с использованием маяков-ответчиков и с участием GPS судового навигационного комплекса обеспечивающего судна (ОС). При этом сеть маяков-ответчиков с определением их координат готовится предварительно и снова с участием GPS навигационного комплекса ОС, а для обеспечения приемлемой точности обсервации сеть маяков-ответчиков подвергается периодической автокалибровке (стр.117-118). В этом случае система ГАНС-УКБ комплексированная с ГАНС-ДБ с дальностью действия 6-10 км дает относительную погрешность 10-2 (стр.157).
Значительная трудоемкость этой технологии позиционирования АНПА при ее невысокой точности стоит дорого и не может быть использована для разработки мобильного полигона.
Известно техническое решение использованное в системе GAPS (Глобальная Акустическая Система Позиционирования) фирмы iXsea, Франция (см. фирменный каталог «GAPSru 0509», 2005 г. или интернет-ресурс http:www.ixsea.com).
В этом техническом решении для повышения точности позиционирования подводных объектов реализовано слияние гидроакустических и инерциальных технологий с использованием GPS через обеспечивающее судно.
При этом для инерциальных навигационных определений используется инерциальная навигационная система (ИНС) со стабилизированной платформой объемом до нескольких десятков кубических дециметров, а для гидроакустических определений координат используется ГАНС-УКБ с дальномером и пеленгатором с двумя взаимно перпендикулярными ультракороткими базами для определения углов пеленга и высоты, а маяки-ответчики устанавливаются на акватории с определением их глобальных географических координат.
В этом решении слияние инерциальных и гидроакустических технологий позиционирования автономного подводного объекта с использованием данных GPS происходит через оценку среднеарифметического между координатами объекта и углами его ориентации, полученными одномоментно в различных системах навигации. Точность позиционирования оценивается по координатам в 0,2% при дальности до 4000 м (это ±8 м) и по углам ±0,12 градусов. Этой точности также недостаточно для восстановления полного набора кинематических параметров движения объекта с последующей оценкой силового воздействия на него.
Из систем уточненного подводного позиционирования построенной на технологии слияния инерциальных и гидроакустических измерений для использования в мобильном полигоне наилучшим образом подходит система, изложенная в заявлении о выдаче патента Российской Федерации на изобретение, зарегистрированном в ФИПС под №2011152152/078270 от 20.12.2011 г.
В качестве прототипа предлагаемого изобретения выбран мобильный полигон - подводная система глобального позиционирования «GIB-LIТЕ» фирмы ACSA, Франция (см. интернет ресурс www.underwater-gps.com), предполагающая пространственное слежение по долготе и широте в режиме реального времени с использованием дифференциальной GPS (D-GPS) с метрической точностью. Для этого вокруг района слежения устанавливается четыре буя. Буи детектируют акустические сигналы, идущие от гидроакустических излучателей, и фиксируют время их прибытия. Затем информация о времени получения сигналов и положения излучателей в соответствии с системой GPS по локальной радиолинии связи передается на монитор блока управления, установленного на корабле-носителе. Блок управления обрабатывает полученную информацию и отображает на дисплее направления на объекты слежения и положение буев.
ТТХ системы:
- точность позиционирования: 2 м на 1 σ (что при ±3 σ составит ±6 м);
- дальность применения в радиочастотном диапазоне: 1 км;
- дальность применения в акустическом диапазоне: 1 км;
- размеры зоны покрытия: 500 м × 500 м × 100 м (глубина);
- количество подвижных элементов: от двух (по умолчанию) до четырех (дополнительно).
Недостатки прототипа:
- слежение только по долготе и широте, исключая угловую ориентацию;
- невозможность получить полный набор кинематических параметров движения объекта;
- недостаточные точность позиционирования и дальность применения.
В основу предлагаемого изобретения поставлена задача разработать такую технологию уточненного позиционирования в подводном навигационном пространстве мобильного полигона, образованном произвольно расставленными буйково-якорными позициями (БЯП) с гидроакустическими маяками-ответчиками и технологию для ее осуществления, которые позволят повысить точность позиционирования по координатам и углам ориентации и восстановить полный набор кинематических параметров движения испытуемого объекта (от перемещений до ускорений) для получения оценки силового воздействия на него жидкости или других объектов, и передать эту информацию в темпе текущего времени, дополнив ее (при необходимости) значениями параметров функционирования внутренних систем и агрегатов испытуемого объекта на пульты управления полигоном на ОС и(или) на береговой пост, находящийся на большом расстоянии от акватории проведения испытаний.
Это позволит снизить затраты как при формировании навигационного пространства мобильного полигона установкой буйково-якорных позиций с маяками-ответчиками на акватории до 75 км и более без предварительного определения их координат, так и из-за сокращения объема и сроков испытаний за счет их расширенного информационного обеспечения функционирования объекта и снижения риска его потери.
Поставленная задача достигается тем, что в технологии уточненного позиционирования в подводном навигационном пространстве мобильного полигона, заключающейся в расстановке радиогидроакустических позиций, в использовании спутниковой системы глобального позиционирования и радиосвязи радиогидроакустических позиций с обеспечивающим судном, на котором определяются долгота и широта объекта наблюдения, отличающейся тем, что в состав объекта испытаний вводят аппаратурный комплекс с системой уточненного трехмерного позиционирования с угловой ориентацией, блок ее информационного обмена с объектом и блок начальных глобальных координат по приемнику ГЛОНАСС, вводят в состав мобильного полигона буйково-якорные позиции с погружным контейнером, размещают в нем аппаратурный модуль с блоком маяка-ответчика системы уточненного позиционирования и блоком демодуляции гидроакустических телеметрических сигналов, в плавающем буе якорной позиции размещают передающее (принимающее) устройство спутниковой системы «ИНМАРСАТ» и радиомодем, на судовом (береговом) посту размещают принимающее (передающее) устройство спутниковой системы «ИНМАРСАТ», блок декодирования гидроакустической информации формирования значений параметров позиционирования объекты, силового воздействия водной среды или другого объекта, формирование управляющих команд с пульта управления, пульт управления полигоном и радиомодем, расставляют буйково-якорные позиции произвольно на акватории испытаний и приводят их в рабочее состояние путем подачи с поста управления на приемники радиомодемов буйковых якорных позиций радиокоманд, кодированных номерами позиций, получают на пульт управления по системе «ИНМАРСАТ» сообщения с позиций о готовности созданного мобильного полигона к работе, вводят в объект перед началом движения начальные глобальные координаты позиционирования с приемника «ГЛОНАСС», подключают к блоку системы уточненного позиционирования блок информационного обмена с объектом, начинают испытание объекта и получают на дисплее пульта управления мобильным полигоном информацию о траекторных параметрах движения и ориентации объекта, параметрах функционирования его систем и о силовом воздействия на него жидкости или другого объекта с частотой обновления 2 с, формируют по результатам экспресс-анализа управляющий телеметрический сигнал, направляют его в блок формирования управляющих телеметрических сеансов и далее через услуги «ИНМАРСАТ» в объект испытаний.
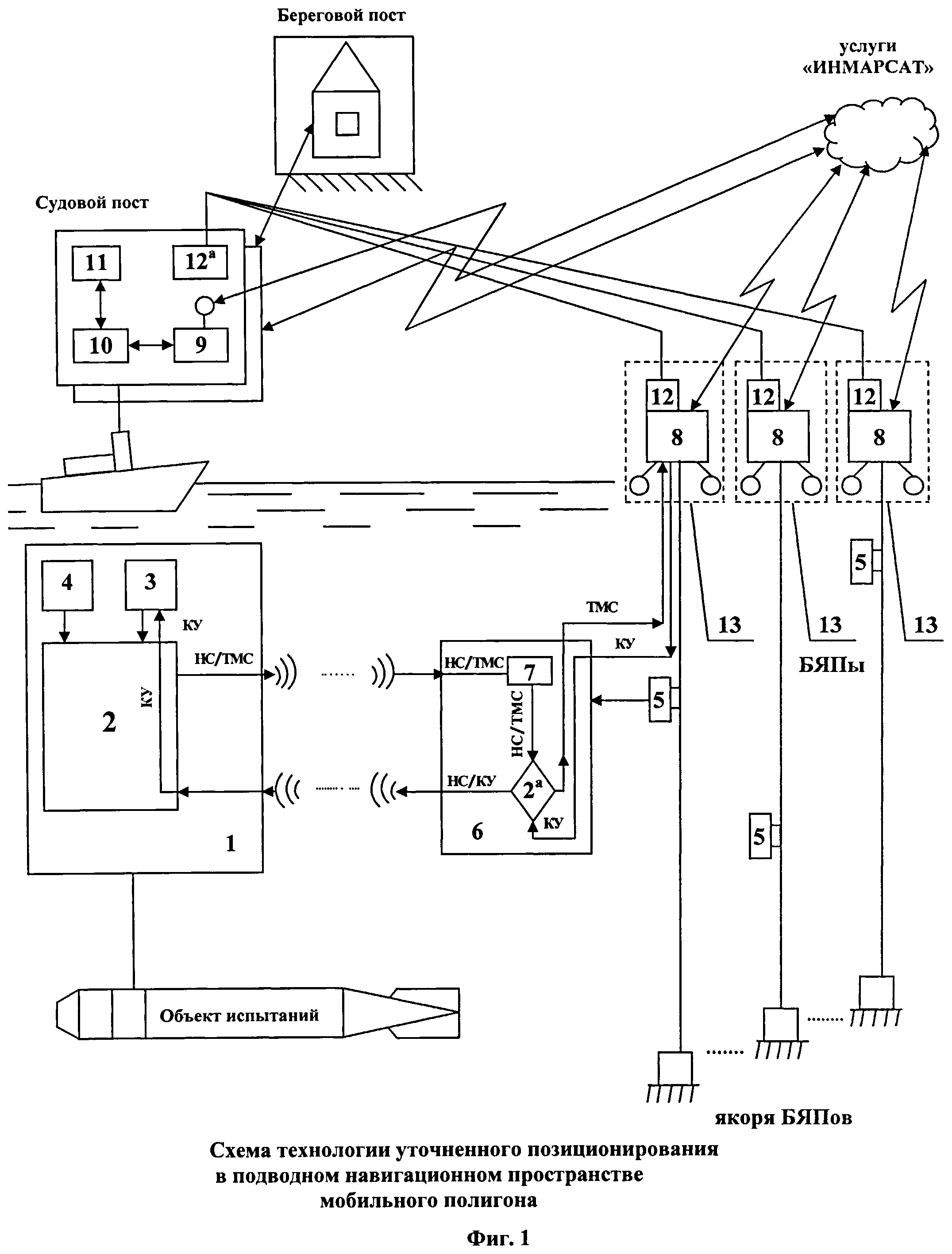
Схема технологии уточненного позиционирования в подводном навигационном пространстве мобильного полигона, образованном произвольно расставляемыми буйково-якорными позициями (БЯП), приведена на фиг.1, где приняты следующие обозначения:
1 - Аппаратурный комплекс с системой уточненного трехмерного позиционирования с угловой ориентацией.
2 - Аппаратурный модуль уточненного трехмерного позиционирования с угловой
ориентацией.
2а - Маяк-ответчик.
3 - Блок информационного обмена объекта испытаний с аппаратурным модулем
системы уточненного позиционирования (поз.2).
4 - Блок начальных глобальных координат по приемнику ГЛОНАСС.
5 - Погружной контейнер БЯП.
6 - Аппаратурный модуль погружного контейнера.
7 - Блок поочередной демодуляции гидроакустических навигационных и телеметрических сигналов.
8 - Принимающее (передающее) устройство спутниковой системы «ИНМАРСАТ» на плавающей буйковой части БЯПа.
9 - Принимающее (передающее) устройство спутниковой системы «ИНМАРСАТ»
на судовом (береговом) посту.
10 - Блок декодирования гидроакустической информации, поступающей из блока поз.9, и формирования значений параметров позиционирования объекта испытаний и функционирования его систем и агрегатов, определение силового воздействия на него жидкости или другого объекта и кодирования управляющих команд, поступающих с пульта управления мобильного полигона (поз.11).
11 - Пульт управления мобильным полигоном.
12 - Радиомодем с приемником на плавающей буйковой части БЯПа и передатчиком на судовом (береговом) посту.
12а - Передатчик радиокоманд на радиомодем судового (берегового) поста.
13 - Буйково-якорная позиция (БЯП).
Для решения поставленной задачи объект испытаний оснащается аппаратурным комплексом (поз.1), аппаратурным модулем уточненного трехмерного позиционирования с угловой ориентацией (поз.2), блоком (поз.3) информационного обмена через аппаратурный модуль поз.2 объекта испытаний с пультом управления мобильным полигоном (поз.11) на судовом (береговом) посту.
В состав мобильного полигона вводятся буйково-якорные позиции, быстро устанавливаемые и снимаемые судовым компактным спуско-подъемным устройством. На якорном буйрепе каждого БЯПа (поз.13) устанавливают погружной контейнер (поз.5), свободно по нему перемещаемый и соединенный с буйковой частью БЯПа кабель-тросом. В состав погружного контейнера входят аппаратурный модуль (поз.6), состоящий из маяка-ответчика (поз.2а) как части аппаратурного модуля системы уточненного трехмерного позиционирования с угловой ориентацией (поз.2) и блока поочередной демодуляции гидроакустических навигационных и телеметрических сигналов (поз.7). В плавающей буйковой части БЯПа размещают передающее (принимающее) устройство спутниковой системы «ИНМАРСАТ» (поз.8) и приемник радиомодема (поз.12), на судовом (береговом) посту размещают принимающее (передающее) устройство спутниковой системы «ИНМАРСАТ» (поз.9), блок (поз.10) декодирования гидроакустической информации, поступающей из блока (поз.9), и формирования значений параметров позиционирования объекта испытаний, функционирования его систем и агрегатов и определения силового воздействия на него жидкости или другого объекта для передачи на пульт управления (поз.11) и кодирования управляющих команд поступающих с пульта управления, а также размещают передатчик радиомодема (поз.12).
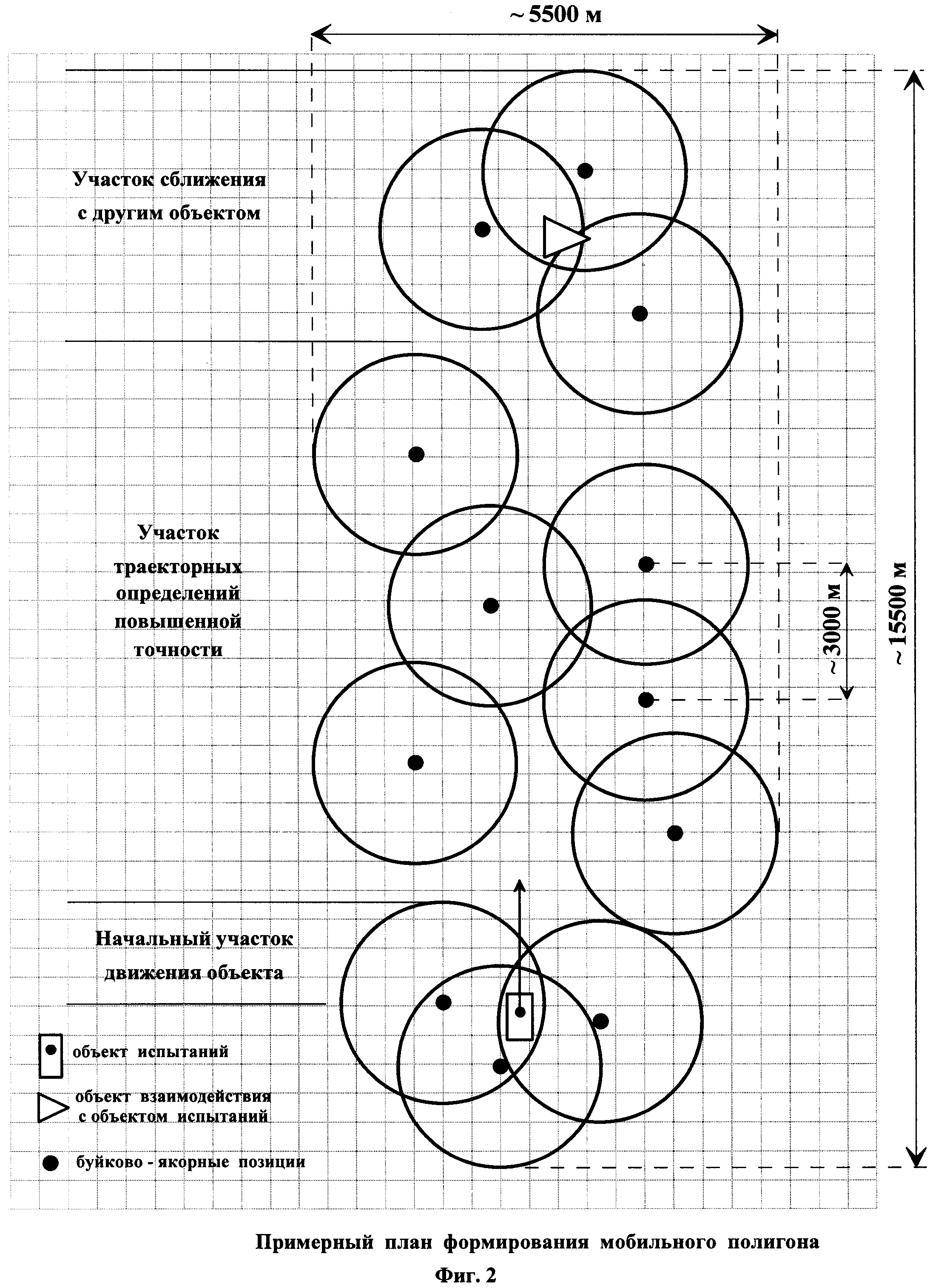
Согласно предлагаемому изобретению для проведения испытаний подводного объекта на некоторой акватории предварительно формируют подводное навигационное пространство путем произвольной расстановки БЯПов с маяками-ответчиками на глубины, определяемые длинами буйрепов и глубиной места установки. При установке БЯПа включают дежурный канал радиомодема с энергосберегающим потреблением. После установки (произвольной) БЯПов на акватории приводят их в рабочее состояние путем подачи с передатчика поста управления на приемники радиомодемов БЯПов радиокоманд, кодированных номерами БЯПов, назначенных для участия в испытаниях. Получают на пульт управления по системе «ИНМАРСАТ» сообщения с БЯПов о готовности сформированного мобильного полигона к работе. На фиг.2 приведен примерный план мобильного полигона.
Перед началом движения в объект позиционирования вводят из блока начальных глобальных координат по приемнику ГЛОНАСС (поз.4) глобальные спутниковые координаты места начала его движения (см. фиг.1)
С момента пуска объекта испытаний определение координат и углов ориентации объекта трехмерного позиционирования с дискретом 0,01 с осуществляется системой уточненного позиционирования (поз.2) при взаимодействии с ее частями маяками-ответчиками в составе аппаратурных модулей погружных контейнеров (поз.5).
В аппаратурном модуле погружного контейнера (поз.6) гидроакустические навигационные и телеметрические сигналы из блока (поз.2) поступают в блок поочередной демодуляции (поз.7). Демодулированные навигационные сигналы из блока (поз.7) поступают в маяк-ответчик (поз.2а) как часть аппаратурного модуля системы уточненного трехмерного позиционирования (поз.2), а демодулированные телеметрические сигналы по кабелю поступают в блок (поз.8) передающего устройства спутниковой системы «ИНМАРСАТ», размещенного на плавающем буе БЯПа. Услугами «ИНМАРСАТ» ТМС поступают в блок принимающего устройства системы «ИНМАРСАТ» (поз.9) на судовом (береговом) посту и далее передаются в блок (поз.10) декодирования и формирования значений параметров позиционирования объекта, функционирования его систем и агрегатов, определения силового воздействия на него жидкости или другого объекта для передачи на пульт управления (поз.11) и обратного приема и кодирования управляющих команд, поступающих с пульта управления. Информацию, поступающую на пульт управления из блока (поз.10), анализируют и по результатам экспресс-анализа формируют управляющий телеметрический сигнал (УТМС) и направляют его в паузы между сеансами ТМС обратно в блок, и далее УТМС передают на передающее устройство спутниковой системы «ИНМАРСАТ» судового поста (поз.9) и далее через услуги «ИНМАРСАТ» в принимающее устройство спутниковой системы (поз.8) БЯПа и далее отправляют в блок (поз.2а) аппаратурного модуля погружного контейнера, где кодируют и далее по гидроакустическому каналу отправляют в аппаратурный модуль системы уточненного позиционирования (поз.2), демодулируют, декодируют и отправляют в блок (поз.3) для передачи на исполнительные устройства объекта испытания.
Возможности уточненного подводного позиционирования объекта на мобильном полигоне по предлагаемому изобретению можно продемонстрировать на результатах цифрового моделирования при обработке имитатора натурных измерений, формирование которого проводится на цифровой модели «идеальной» картины движения объекта позиционирования введением в значения идеальных параметров движения «измеряемых» случайных ошибок, распределенных по нормальному закону со смещением Δ и среднеквадратичным отклонением σ.
В процессе численных исследований для имитатора натурных измерений варианты ошибок формировались из следующих диапазонов значений, взятых по результатам лабораторно-стендовых испытаний аппаратурных модулей объекта позиционирования (поз.2) и маяка-ответчика с натурными датчиками.
На фиг.3 показан результат уточнения параметров позиционирования объекта сопоставлением измерений их во времени (Xg(t), Yg(t), Zg(t)) для вариантов моделирования движения объекта с нулевыми ошибками измерений с ошибками по следующему варианту:
 - координаты Δγ=1 град (крен)
- координаты Δγ=1 град (крен)
 - линейные ускорения Δψ=0,4 град (курс)
- линейные ускорения Δψ=0,4 град (курс)
 - угловые скорости Δθ=0,2 град (дифферент)
- угловые скорости Δθ=0,2 град (дифферент)
 σγ=0,06 град
σγ=0,06 град
 σψ=0,04 град
σψ=0,04 град
 σθ=0,02 град
σθ=0,02 град
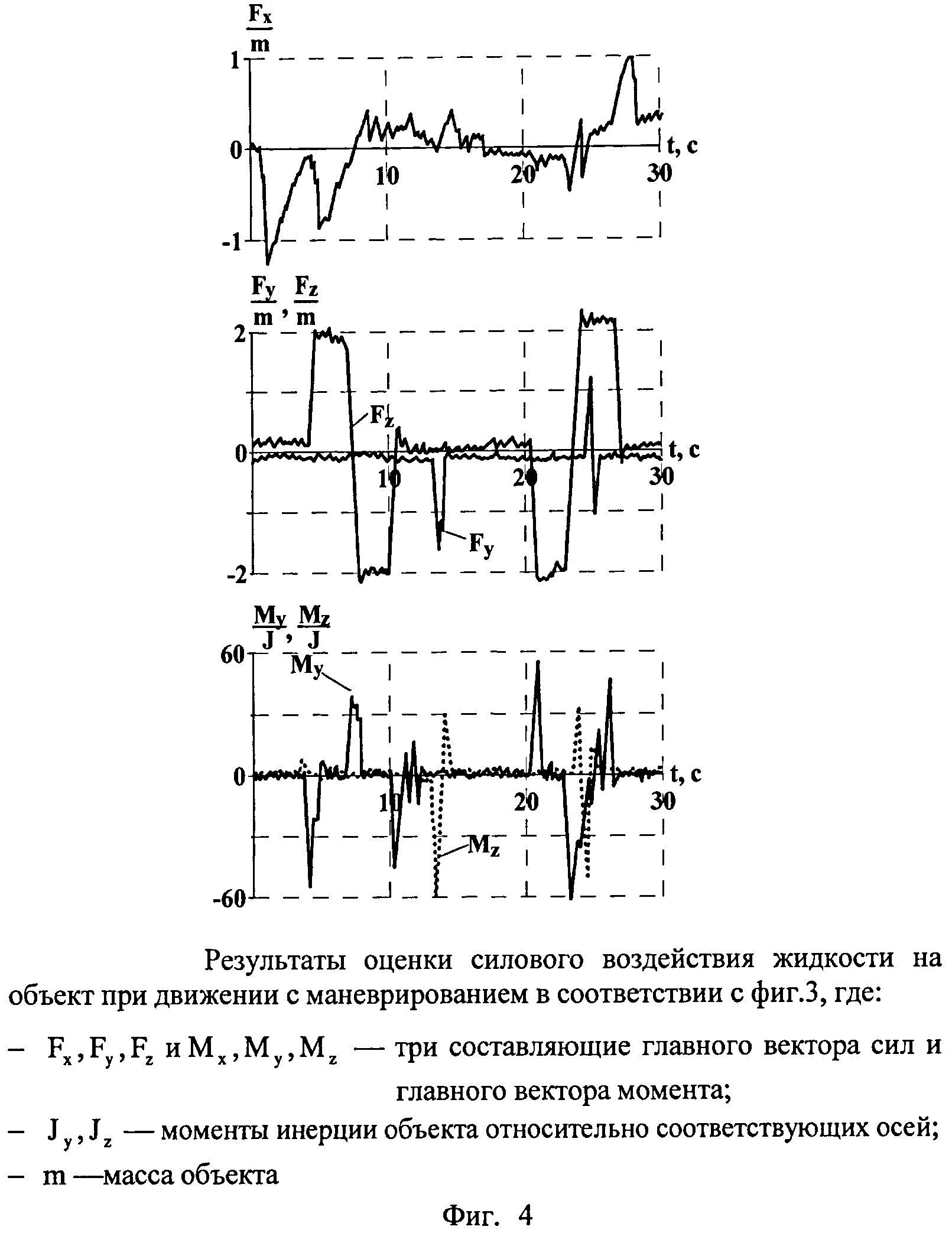
На фиг.4 приведены результаты оценки силового воздействия жидкости на объект при движении с маневрированием в соответствии с фиг.3 где:
- Fx; Fy; Fz и Мх; Му; Mz - три составляющих главного вектора сил и главного вектора момента;
- m - масса объекта;
- Jy; Jz - моменты инерции объекта вокруг соответствующих осей.
Технический результат заявленного изобретения заключается в снижении погрешности определения координат позиционирования и углов ориентации объекта позиционирования в пространстве мобильного полигона, образованном произвольно расставленными буйково-якорными позициями с гидроакустическими маяками-ответчиками; в возможности оценки силового воздействия на объект жидкости или других объектов, а также в возможности получения информации о функционировании объекта испытаний в темпе текущего времени при снижении трудоемкости и временных затрат при проведении испытаний подводных объектов на мобильном полигоне.
Технология уточненного позиционирования в подводном навигационном пространстве мобильного полигона, заключающаяся в расстановке радиогидроакустических позиций, в использовании спутниковой системы глобального позиционирования и радиосвязи радиогидроакустических позиций с обеспечивающим судном, на котором определяются долгота и широта объекта наблюдения, отличающаяся тем, что в состав объекта испытаний вводят аппаратурный комплекс с системой уточненного трехмерного позиционирования с угловой ориентацией, блока ее информационного обмена с объектом и блока начальных глобальных координат по приемнику ГЛОНАСС, вводят в состав мобильного полигона буйково-якорные позиции с погружным контейнером, размещают в нем аппаратурный модуль с блоком маяка-ответчика системы уточненного позиционирования и блоком демодуляции гидроакустических телеметрических сигналов, в плавающем буе якорной позиции размещают передающее (принимающее) устройство спутниковой системы «ИНМАРСАТ» и радиомодем, на судовом (береговом) посту размещают принимающее (передающее) устройство спутниковой системы «ИНМАРСАТ», блок декодирования гидроакустической информации, формирования значений параметров позиционирования объекта, силового воздействия водной среды или другого объекта, формирования управляющих команд с пульта управления, пульт управления полигоном и радиомодем, расставляют буйково-якорные позиции произвольно на акватории испытаний и приводят их в рабочее состояние путем подачи с поста управления на приемники радиомодемов буйковых якорных позиций радиокоманд, кодированных номерами позиций, получают на пульт управления по системе «ИНМАРСАТ» сообщения с позиций о готовности созданного мобильного полигона к работе, вводят в объект перед началом движения начальные глобальные координаты позиционирования с приемника «ГЛОНАСС», подключают к блоку системы уточненного позиционирования блок информационного обмена с объектом, начинают испытание объекта и получают на дисплее пульта управления мобильным полигоном информацию о траекторных параметрах движения и ориентации объекта, параметрах функционирования его систем и о силовом воздействия на него жидкости или другого объекта с частотой обновления 2 с, формируют по результатам экспресс-анализа управляющий телеметрический сигнал, направляют его в блок формирования управляющих телеметрических сеансов и далее через услуги «ИНМАРСАТ» в объект испытаний.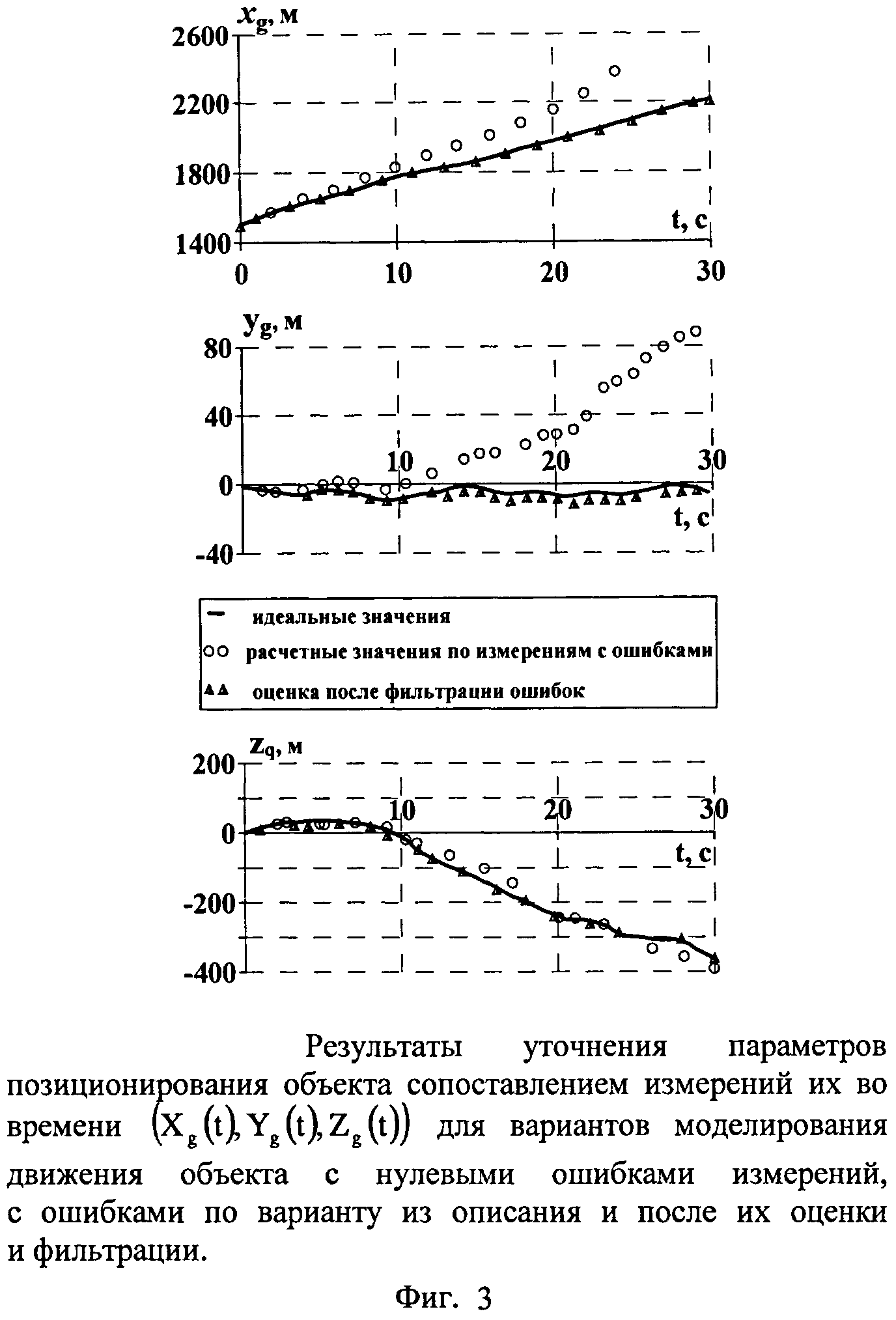
Уточненное позиционирование в подводном навигационном пространстве, образованном произвольно расставленными гидроакустическими маяками-ответчиками
Способ и устройство фазовой синхронизации
Сигнализатор затраливания мины контактным тралом
Устройство для уничтожения якорных мин
Опускное подводное устройство
Способ демодуляции фазоманипулированных сигналов
Способ декодирования псевдошумового сигнала
Угледобывающий комбайн
Полупроводниковый датчик метана
Угледобывающий комбайн
Уточненное позиционирование в подводном навигационном пространстве, образованном произвольно расставленными гидроакустическими маяками-ответчиками
Способ и устройство фазовой синхронизации
Сигнализатор затраливания мины контактным тралом
Опускное подводное устройство
Способ демодуляции фазоманипулированных сигналов
Способ декодирования псевдошумового сигнала
Угледобывающий комбайн
Полупроводниковый датчик метана
Угледобывающий комбайн
Способ изготовления термоэлектрического генератора

