Результат интеллектуальной деятельности: УТОЧНЕННОЕ ПОЗИЦИОНИРОВАНИЕ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ, ОБРАЗОВАННОМ ПРОИЗВОЛЬНО РАССТАВЛЕННЫМИ ГИДРОАКУСТИЧЕСКИМИ МАЯКАМИ-ОТВЕТЧИКАМИ
Вид РИД
Изобретение
Изобретение относится к подводной навигации и может быть использовано при подводно-технических работах общехозяйственного и специального назначения с применением автономных необитаемых подводных аппаратов (АНПА) с автоматическим или супервизорным управлением, автономно выполняющих операции, требующие уточненного позиционирования АНПА.
Для повышения точности позиционирования подводных объектов известны технические решения, основанные на использовании избыточного числа траекторных определений различными навигационными средствами. Это гидроакустические навигационные системы с длинными базами (ГАНС-ДБ) и с ультракороткими (ГАНС-УКБ), инерциальные навигационные системы (ИНС) со стабилизированными платформами и спутниковая система глобального позиционирования GPS. В случае подводного позиционирования АНПА спутниковая навигация используется в режиме периодических корректировок координат при всплытиях АНПА или в режиме регулярных корректировок при работе АНПА с обеспечивающим судном (ОС) и наличии гидроакустической связи между ними.
Наиболее полное представление этих решений приводится в монографии «Автономные подводные работы: системы и технологии», авторы М.Д. Агеева, Л.В. Киселев, Ю.В. Матвиенко и др., под общей редакцией М.Д. Агеева, Институт проблем морских технологий. М.: Наука, 2005 г.
В указанной работе в навигационном комплексе ИПМТ ДВО РАН (стр.157-160) позиционирование АНПА решается комплексированием ГАНС-ДБ и ГАНС-УКБ с использованием маяков-ответчиков и с участием GPS судового навигационного комплекса ОС. При этом сеть маяков-ответчиков с определением их координат готовится предварительно и снова с участием GPS навигационного комплекса ОС, а для обеспечения приемлемой точности обсервации сеть маяков-ответчиков подвергается периодической автокалибровке (стр.117-118). В этом случае система ГАНС-УКБ комплексированная с ГАНС-ДБ с дальностью действия 6-10 км дает относительную погрешность 10-2 (с.157).
Значительная трудоемкость этой технологии позиционирования АНПА при ее не высокой точности стоит дорого и она не может быть использована для большого объема работ, связанных с техническим и экологическим мониторингом нефтегазопроводных труб на морском дне.
Известны технические решения (см. «Способ определения горизонтальных координат неподвижного подводного источника гидроакустических навигационных сигналов», патент РФ №2378663; и «Способ определения пеленга на источник излучения и устройство для его осуществления» Патент РФ №2158430), которые направлены только на обеспечение предварительного позиционирования маяков-ответчиков для последующих навигационных определений АНПА по системам ГАНС-ДБ и ГАНС-УКБ с участием GPS навигационного комплекса ОС.
В качестве прототипа предлагаемого изобретения выбрана система GAPS (Глобальная Акустическая Система Позиционирования) фирмы iXsea, Франция (см. фирменный каталог «GAPSru 0509», 2005 г.или Интернет-ресурс http:www.ixsea.com).
В этом техническом решении для повышения точности позиционирования подводных объектов реализовано слияние гидроакустических и инерциальных технологий с использованием GPS через обеспечивающее судно.
При этом для инерциальных навигационных определений используется инерциальная навигационная система (ИНС) со стабилизированной платформой объемом до нескольких десятков кубических дециметров, а для гидроакустических определений координат используется ГАНС-УКБ с дальномером и пеленгатором с двумя взаимно перпендикулярными ультракороткими базами для определения углов пеленга и высоты, а маяки-ответчики устанавливаются на акватории с определением их глобальных географических координат.
В прототипе слияние инерциальных и гидроакустических технологий позиционирования автономного подводного объекта с использованием данных GPS происходит через оценку среднеарифметического между координатами объекта и углами его ориентации полученных одномоментно в различных системах навигации. Точность позиционирования в прототипе оценивается по координатам в 0,2% при дальности до 4000 м (это плюс минус 8 м) и по углам плюс минус 0,12 градусов.
В основу изобретения поставлена задача, разработать такой способ уточненного позиционирования в подводном навигационном пространстве, образованном произвольно расставленными гидроакустическими маяками-ответчиками и систему для его осуществления, которые позволят повысить точность позиционирования по координатам и углам ориентации.
Это позволит снизить затраты при проведении подводно-технических работ в навигационном пространстве, образованном маяками-ответчиками произвольно установленными на акватории (допускается установка из подводного положения) без предварительного определения их координат.
Поставленная задача достигается тем, что в способе уточненного позиционирования в подводном навигационном пространстве, образованном произвольно расставленными гидроакустическими маяками-ответчиками, заключающемся в получении данных инерциальной навигационной системы, гидроакустической навигационной системы, а также спутниковой системы глобального позиционирования, согласно изобретению гидроакустические маяки-ответчики расставляют по акватории произвольно без предварительного определения их глобальных координат, вводят начальные глобальные координаты в объект позиционирования по определениям спутниковой системы глобального позиционирования только один раз перед началом его погружения, удерживают объект позиционирования в течение 10÷30 секунд в погруженном состоянии перед началом движения, измеряют углы курса, крена, дифферента цифровым магнитометрическим компасом, глубину погружения объекта позиционирования датчиком гидростатического давления и определяют глобальные координаты объекта позиционирования по измерениям с дискретом 100 Гц микромеханическими датчиками бесплатформенной инерциальной навигационной системы, далее посылают гидроакустические запросы, кодированные порядковым номером с объекта позиционирования на маяк-ответчик, на маяке-ответчике декодируют запросный сигнал, измеряют глубину установки маяка-ответчика и одновременно с номером маяка-ответчика кодируют ответ и отправляют с маяка-ответчика на объект позиционирования, где декодируют полученный ответ, измеряют скорость звука, определяют наклонную дальность до маяка-ответчика, угол пеленга на него, и разность глубин объекта позиционирования и маяка-ответчика, далее определяют глобальные координаты маяков-ответчиков, попавших в область гидроакустического взаимодействия с объектом позиционирования в момент ввода начальных глобальных координат со спутниковой системы глобального позиционирования и удержания объекта позиционирования в погруженном состоянии, определяют глобальные координаты объекта позиционирования по измерениям гидроакустической навигационной системы с ультракороткой базой, определяют оценки инструментальных ошибок датчиков путем комплексирования инерциальных, гидроакустических, гидростатических и магнитных избыточных измерений, определяют уточненные глобальные координаты объекта позиционирования с учетом оценок инструментальных ошибок, а при движении объекта позиционирования определяют глобальные координаты маяков-ответчиков впервые попадающих в область гидроакустического взаимодействия с объектом позиционирования, используя при этом значение глобальных координат объекта позиционирования в момент первого контакта с маяком-ответчиком.
Поставленная задача решается также тем, что система уточненного позиционирования в подводном навигационном пространстве, образованном произвольно расставленными гидроакустическими маяками-ответчиками, содержащая объект позиционирования и гидроакустический маяк-ответчик, отличается тем, что в объект позиционирования дополнительно введен счетчик запросных гидроакустических сигналов, выход которого соединен с входом блока кодирования и декодирования, а выход последнего подключен к приемоизлучающему устройству объекта позиционирования и измерителю наклонной дальности до маяка-ответчика и пеленга на него и к входу блока определения координат маяка-ответчика, выход которого вместе с выходом блока измерителя скорости звука подключены к блоку вычисления координат гидроакустической навигационной системы с ультракороткой базой, а также дополнительно в объект позиционирования введен блок комплексирования инерциальных, гидроакустических, магнитных и гидростатических измерений с оценкой ошибок их датчиков, входы которого соединены с выходом блока определения координат и углов ориентации бесплатформенной инерциальной навигационной системы и с выходом блока определения координат гидроакустической навигационной системы с ультракороткой базой, с выходом цифрового магнитометрического компаса с измерением углов ориентации, с выходом датчика глубины объекта позиционирования, а выход соединен с входом блока определения уточненных глобальных координат и углов ориентации объекта позиционирования, а в маяк-ответчик дополнительно введен блок декодирования номера гидроакустического запроса, вход которого соединен с выходом приемоизлучающего устройства маяка-ответчика, а выход соединен с входом блока кодирования номера запроса, номера маяка-ответчика и глубины маяка-ответчика, кроме того, в маяк-ответчик дополнительно введены датчик глубины, блок отметчика номера маяка-ответчика, выходы которых соединены с входами блока кодирования номера запроса, номера маяка-ответчика и глубины маяка-ответчика, а выход последнего соединен с входом приемоизлучающего устройства маяка-ответчика.
Технический результат достигается комплексированием инерциальных, гидроакустических, гидростатических и магнитных измерений с использованием цифровой статистически оптимальной обработки избыточного числа измерений параметров движения и позиционирования объекта для оценки инструментальных ошибок, состоятельность которых основывается на равноточных гидроакустических измерениях для определения глобальных координат гидроакустических маяков-ответчиков в процессе движения объекта позиционирования от точки введения начальных значений глобальных координат и после чего, определяются уточненные пространственные глобальные координаты объекта позиционирования и углы его ориентации.
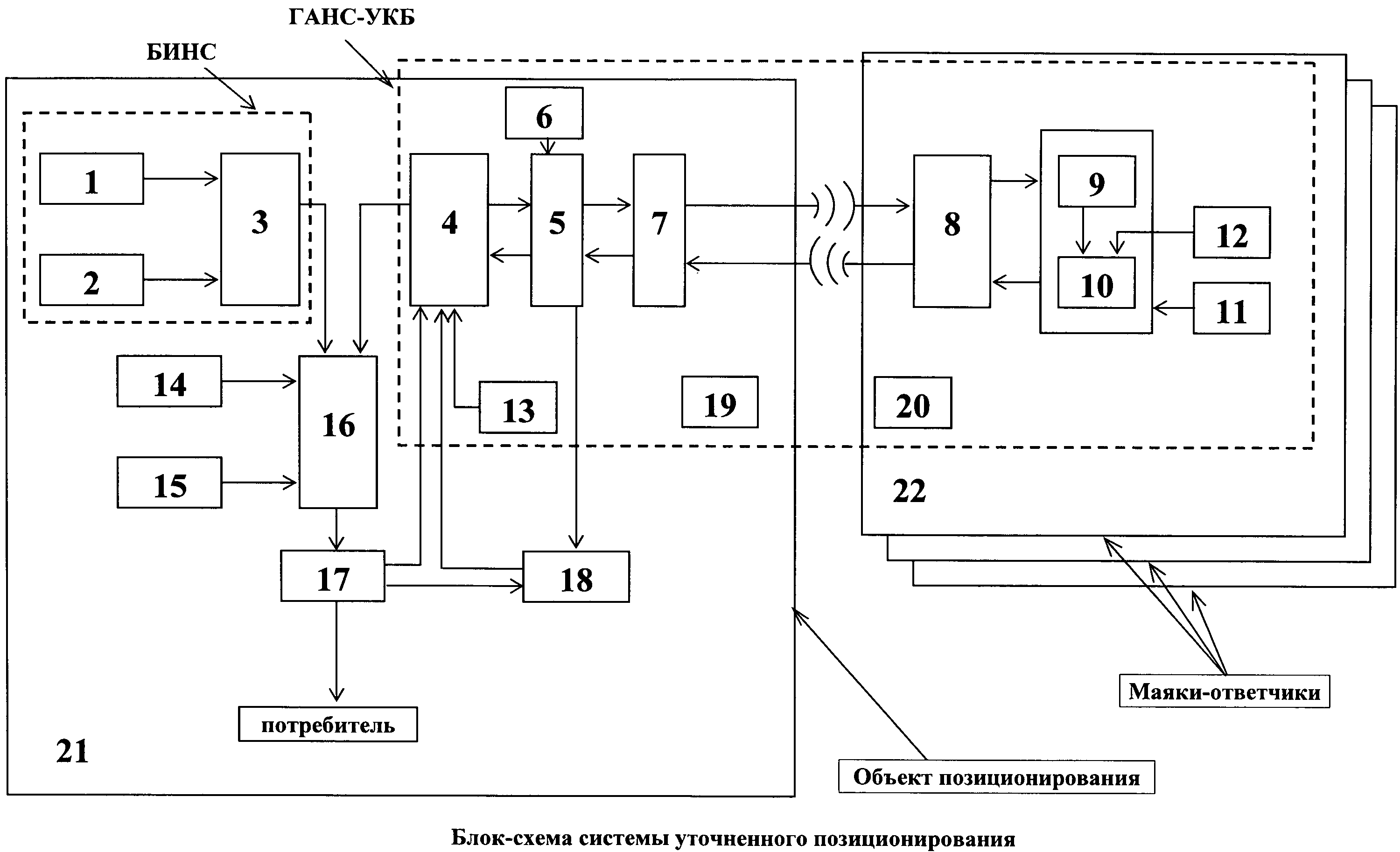
Блок-схема системы уточненного позиционирования в подводном навигационном пространстве, образованном произвольно расставленными гидроакустическими маяками-ответчиками приведена на фигуре, где приняты следующие обозначения:
1 - Блок начальных глобальных координат по приемнику GPS.
2 - Блок микромеханических датчиков инерциальных измерений БИНС.
3 - Блок определения координат и углов ориентации БИНС.
4 - Блок определения координат ГАНС-УКБ.
5 - Блок кодирования и декодирования.
6 - Счетчик запросных гидроакустических сигналов.
7 - Приемоизлучающее устройство объекта позиционирования и измеритель наклонной дальности до маяка-ответчика и пеленга на него.
8 - Приемоизлучающее устройство маяка-ответчика.
9 - Блок декодирования номера гидроакустического запроса.
10 - Блок кодирования номера запроса, номера маяка-ответчика и глубины маяка-ответчика.
11 - Датчик глубины маяка-ответчика.
12 - Блок отметчика номера маяка-ответчика.
13 - Блок измерения скорости звука.
14 - Цифровой магнитометрический компас для измерения углов ориентации.
15 - Датчик глубины объекта позиционирования.
16 - Блок комплексирования измерений и оценки ошибок датчиков.
17 - Блок определения уточненных глобальных координат и углов ориентации объекта позиционирования.
18 - Блок определения координат маяка-ответчика.
19, 20 - Автономные источники питания объекта позиционирования и маяков-ответчиков.
21 - Аппаратурный модуль объекта позиционирования.
22 - Аппаратурные модули маяков-ответчиков.
23 - Гидроакустическая навигационная система с ультракороткой базой (ГАНС-УКБ).
24 - Бесплатформенная инерциальная навигационная система (БИНС).
Для решения поставленной задачи объект позиционирования оснащается аппаратурным модулем (поз.21) в составе с бесплатформенной инерциальной навигационной системой (поз.24) на микромеханических датчиках и объемом около 0,8 дм3, а гидроакустические маяки-ответчики оснащаются аппаратурными модулями (поз.22).
Согласно предлагаемому изобретению для уточненного позиционирования подводного объекта на некоторой акватории предварительно формируют подводное навигационное пространство путем произвольной расстановки маяков-ответчиков на глубины определяемые длинами буйрепов и глубиной места установки. Перед сбросом маяков-ответчиков включают его дежурный канал с энергосберегающим потреблением.
Перед пуском в объект позиционирования вводят из блока начальных глобальных координат по приемнику GPS (поз.1) глобальные спутниковые координаты места запуска и удержания объекта позиционирования в погруженном состоянии покоя для начальной юстировки измерительных датчиков в течение 10÷30 с для получения числа гидроакустических обменов с маяками-ответчиками, обеспечивающих статистическую достаточность и адаптации объекта с подготовленным навигационным пространством.
В этот период работают обе системы навигации БИНС (поз.24) и ГАНС-УКБ (поз.23) и определяются глобальные координаты маяков-ответчиков, оказавшихся в зоне взаимодействия с объектом позиционирования.
Определение координат и углов ориентации объекта позиционирования осуществляется в блоке определения координат и углов ориентации БИНС (поз.3), по результатам измерений с дискретом 100 Гц в блоке микромеханических датчиков инерциальных измерений (поз.2) с момента начала и до конца миссии объекта позиционирования, непрерывно в темпе установленного дискрета и эти данные поступают в блок комплексирования измерений и оценки ошибок датчиков (поз.16).
Определение координат объекта позиционирования в ГАНС-УКБ (поз.23) носит не регулярный характер и зависит от расстояния движущегося объекта позиционирования до маяка-ответчика. При этом гидроакустический запросный сигнал формируется непрерывно с заданным дискретом в блоке определения координат в ГАНС-УКБ (поз.4), кодируется порядковым номером в блоке кодирования и декодирования (поз.5) и поступает в приемоизлучающее устройство объекта позиционирования и измеритель наклонной дальности до маяка-ответчика и пеленга на него (поз.7) для излучения в водную среду. Как только объект позиционирования входит в зону гидроакустического взаимодействия с маяком-ответчиком, его дежурный режим переходит в рабочий, и начинает формироваться гидроакустический информационный обмен. Гидроакустический запросный сигнал через приемоизлучающее устройство маяка-ответчика (поз.8) поступает в блок декодирования номера гидроакустического запроса (поз.9) для декодирования номера запроса и далее в блок кодирования номера запроса, номера маяка-ответчика и глубины маяка-ответчика (поз.10) для совместного кодирования значений измеренной глубины маяка-ответчика датчиком измерения глубины маяка-ответчика (поз.11), номера маяка-ответчика из блока отметчика номера маяка-ответчика (поз.12) и последующей передачи в приемоизлучающее устройство маяка-ответчика (поз.8) для отправки гидроакустического ответа на объект позиционирования. После приема в приемоизлучающем устройстве объекта позиционирования и измерителе наклонной дальности до маяка-ответчика и пеленга на него (поз.7), гидроакустический ответ декодируется в блоке кодирования и декодирования (поз.5) и поступает в два адреса: блок для определения координат маяка-ответчика (поз.18) с использованием значений углов ориентации, поступающих из блока определения уточненных глобальных координат и углов ориентации объекта позиционирования (поз.17); второй адрес - блок вычисления координат ГАНС-УКБ (поз.4), в который кроме данных блока поз.5 поступают уточненные значения углов ориентации из блока поз.17, измеренные значения скорости звука из блока поз.13 и значения координат маяка-ответчика из блока поз.18.
Для обеспечения помехозащищенности информационного обмена по гидроакустическому каналу используется фазоманипулированное кодирование /декодирование в блоке (поз.5) в объекте позиционирования и в блоках (поз.9 и 10) маяка-ответчика.
Результаты траекторных определений по двум системам навигации блоков (поз.3 и 4) поступают вместе с измерениями углов курса, крена и дифферента цифровым магнитометрическим компасом (поз.14), датчиком глубины объекта позиционирования (поз.15) и датчиком глубины маяка-ответчика (поз.11) поступают в блок комплексирования и оценки ошибок датчиков измерений (поз.16) для статистически оптимальной обработки избыточного числа измерений датчиками различной физической природы, сочетая обработку по полной выборке с обработкой по рекуррентной схеме. Получаемые в результате оценки инструментальных ошибок датчиков минимизирующих невязки в траекторных определениях используются для определения уточненных глобальных координат и углов ориентации объекта позиционирования в блоке (поз.17).
Возможности уточненного подводного позиционирования объекта позиционирования по предлагаемому изобретению можно продемонстрировать на результатах цифрового моделирования при обработке имитатора натурных измерений, формирование которого проводится на цифровой модели «идеальной» картины движения объекта позиционирования введением в значения идеальных параметров движения «измеряемых» случайных ошибок, распределенных по нормальному закону со смещением Δ и среднеквадратичным отклонением σ.
В процессе численных исследований для имитатора натурных измерений варианты ошибок формировались из следующих диапазонов значений, взятых по результатам лабораторно-стендовых испытаний аппаратурных модулей объекта позиционирования (поз.21) и маяка-ответчика (поз.22) с натурными датчиками:
|






В таблице приведено сопоставление введенных в имитатор значений ошибок измерений и значений полученных оценок в процессе обработки по программе комплексирования из чего следует, что имитационные ошибки измерений оцениваются на уровне 95-98%, а их учет при определении углов ориентации дает отклонение от значений «идеального» имитатора по координатам позиционирования в диапазоне плюс минус 0,325 метра, а по углам ориентации в диапазоне плюс минус 0,1 градуса. Приведенный уровень точности позиционирования объекта позиционирования сохраняется на всем подводном навигационном пространстве, ограниченном группировкой маяков-ответчиков, т.е. не зависит от пройденного объектом пути в этом пространстве и дальности позиционирования.
Технический результат заявленного изобретения заключается в снижении погрешности определения координат позиционирования и углов ориентации объекта позиционирования в пространстве, образованном произвольно расставленными гидроакустическими маяками-ответчиками при снижении трудоемкости и временных затрат.
|










Способ и устройство фазовой синхронизации
Технология уточненного позиционирования в подводном навигационном пространстве мобильного полигона
Сигнализатор затраливания мины контактным тралом
Устройство для уничтожения якорных мин
Опускное подводное устройство
Способ демодуляции фазоманипулированных сигналов
Способ декодирования псевдошумового сигнала
Угледобывающий комбайн
Полупроводниковый датчик метана
Угледобывающий комбайн
Способ и устройство фазовой синхронизации
Технология уточненного позиционирования в подводном навигационном пространстве мобильного полигона
Сигнализатор затраливания мины контактным тралом
Опускное подводное устройство
Способ демодуляции фазоманипулированных сигналов
Способ декодирования псевдошумового сигнала
Угледобывающий комбайн
Полупроводниковый датчик метана
Угледобывающий комбайн
Способ изготовления термоэлектрического генератора

