Результат интеллектуальной деятельности: СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к средствам коррекции навигационных систем подвижных (в частности, морских) объектов, нуждающихся в непрерывном или дискретном определении местоположения и пространственной ориентации (углы курса, крена и дифферента) в масштабе реального времени. В проведении коррекции нуждаются гироскопические системы (инерциальные навигационные системы и др.), а также измерители скорости (лаги) и курса (компасы, гирогоризонткомпасы), способные вырабатывать текущие значения параметров движения объекта в автономном режиме функционирования. Необходимость коррекции показаний этих систем вызывается снижением во времени точности выработки ими навигационных параметров в процессе автономного функционирования.
В настоящее время алгоритмы определения по спутникам местоположения и вектора скорости подвижного объекта основаны на измерениях дальности и скорости ее изменения от объекта до четырех и более среднеорбитных навигационных спутников, причем положение и скорость объекта определяются путем линеаризации измерений относительно расчетной траектории движения. Для определения скорости объекта по измерениям дальности до четырех и более среднеорбитных спутников к настоящему времени разработаны различные алгоритмы обработки измерительной информации (Единая система инерциальной навигации и стабилизации «Ладога-М» / Пешехонов В.Г. и др. Морская радиоэлектроника. 2003. - В. 1(4). - С.26-30 [1], патент RU №2241239 С2, 27.11.2004 [2], патент RU №2308681 С1, 20.10.2007 [3], патент RU №2374660 С2, 27.11.2009 [4], патент US №5570097 А, 29.10.1996 [5]).
Известные способы определения курса объекта с помощью спутников требуют либо пространственного разнесения по объекту нескольких антенн, либо вращения (с относительно большим радиусом) в горизонтальной плоскости одной антенны, либо, наконец, автоматического пеленгования спутников по азимуту и высоте с одновременным использованием данных автономных навигационных средств объекта об углах качки и курса объекта [1-5]. Реализация этих способов в реальных условиях встречает серьезные трудности.
Так в известной корректируемой системе инерциальной навигации и стабилизации (СИНС) Ладога-М [1] реализован классический способ и алгоритм функционирования инерциальной навигационной системы (ИНС) полуаналитического типа с коррекцией по сигналам спутниковой навигационной системы (СНС). В систему поступает следующая информация:
- скорость от лага Vл;
- грубый курс от гирокомпаса К0;
- координаты ψс, λс, скорость Vc и путевой угол К от приемника СНС.
Система имеет два рабочих режима:
- корректирующий режим (КР);
- автономный режим (АР).
В каждом запуске системы производится калибровка, которая продолжается 6-8 часов. Калибровка требует поступления внешних позиционных скоростных данных. Для КР используется информация от приемника СНС и лага, а в АР - только от лага. Описанной структуре системы соответствует способ, представляющий собой совокупность следующих приемов:
- измеряют три составляющие ускорения;
- принимают данные об углах качки и азимутальном угле (А);
- принимают информацию о координатах, скорости и путевом угле от приемника СНС;
- осуществляют начальную выставку и калибровку системы.
Процесс калибровки состоит в том, чтобы по внешним данным о координатах и скорости вычислить и скорректировать ошибки и воздействия, снижающие точность функционирования. Поскольку процесс выставки продолжается 6-8 часов, оперативная коррекция параметров ориентации изложенным способом не представляется возможной. Кроме того, в современных условиях функционирования СНС ГЛОНАС из-за ее недостаточной доступности и целостности система коррекции не обеспечивает нормальную работу СИНС «Ладога-М», а необходимость длительного сеанса обсервации по сигналам СНС ведет к опасности быть обнаруженным средствами наблюдения противника. Сокращение же длительности сеанса обсервации приводит к снижению точности выработки навигационных данных.
Для устранения недостатков известных технических решений [1-5] в части обеспечения коррекции параметров ориентации объекта предложен также известный способ определения местоположения объекта и параметров его движения по измеренным дальностям «объект-спутник» (патент RU №2448326С2, 20.04.2012 [6]). Суть способа (в отличие от традиционного подхода) в измерении дальностей до навигационных спутников в три близких момента времени. В основе этого способа лежит решение навигационной задачи методом Гаусса - методом преобразования совокупности угловых координат спутника к его радиусам-векторам в инерциальной системе координат. Известный способ спутниковой коррекции автономных средств навигации подвижных объектов [6] включает автономные средства измерения местоположения, скорости и курса объекта и приемник спутниковой навигационной системы, в котором в отличие от известного технического решения [1] выработка спутниковой системой навигационных параметров коррекции базируется на измерениях дальности от объекта до навигационных спутников в три близких (около 1 с) момента времени с возможностью использования только одного спутника для коррекции автономных средств навигации подвижных объектов.
Однако в известных способах передачи кодовых сообщений при передаче информации используются методы со скачкообразной перестройкой частоты (Прокис Джон, Цифровая связь, М.: Радио связь, 2000 г. - С.628-629 [7]), т.е. методы многоуровневой частотной манипуляции (MFSK, т.е. М-аrу frequency keying). Приемные устройства таких систем состоят из многоканальных приемников, настроенных на различные частоты. Это приводит к значительному усложнению аппаратуры связи.
Кроме того, на границе морская среда-атмосфера, характерной для судов и кораблей, среда, в которой распространяются радиосигналы, характеризуется значительной пространственно-временной изменчивостью, обуславливающая особый характер процессов передачи электромагнитных волн. Особенность распространения сигналов над морем проявляется в виде изменений амплитуды, фазы, времени и углов прихода и других параметров электромагнитного поля в точке приема. Одним из наиболее неприятных явлений, имеющих место при распространении сигналов, является многолучевость, проявляющаяся в конечном счете в виде мультипликативной помехи, приводящая к замираниям. Такая помеха в общем случае может значительно снижать достоверность приема сообщений.
Одним из способов, позволяющим эффективно бороться с ухудшением характеристик, вызванным замиранием, является применение сигналов переносчиков с расширением в спектральной и временной области. В частности, в радиосистемах передачи информации часто используются методы со скачкообразной перестройкой частоты [7], т.е. методы многоуровневой частотной манипуляции (MFSK, т.е. M-ary frequency keying). Приемные устройства таких систем состоят из многоканальных приемников, настроенных на различные частоты. Это приводит к значительному усложнению аппаратуры связи.
Задачей данного изобретения является разработка способа модуляции сигналов, позволяющего применять только один канал приема цифровой информации для всех рабочих частот, что значительно упростит приемное устройство, а также обеспечить повышенную помехоустойчивость при передачи радиосигналов в условиях мультипликативных помех.
Поставленная задача решается за счет того, что в способе спутниковой коррекции автономных средств навигации подвижных объектов, включающем автономные средства измерения местоположения, скорости и курса объекта и приемник спутниковой навигационной системы, в котором выработка спутниковой системой навигационных параметров коррекции базируется на измерениях дальности от объекта до навигационных спутников в три близких (около 1 с) момента времени с возможностью использования только одного спутника для коррекции автономных средств навигации подвижных объектов, в котором в отличие от прототипа [6], передачу кодовых сообщений (цифровой информации) осуществляют на различных частотах по одному радиоканалу связи путем формирования синхроимпульса и разрядов кода логический «0» и логическая «1», при этом передают импульсы, соответствующие одному разряду, разделенные во времени. Сущность способа поясняется чертежами.
Фиг.1. Пример формирования кодовой посылки, состоящей из семи разрядов.
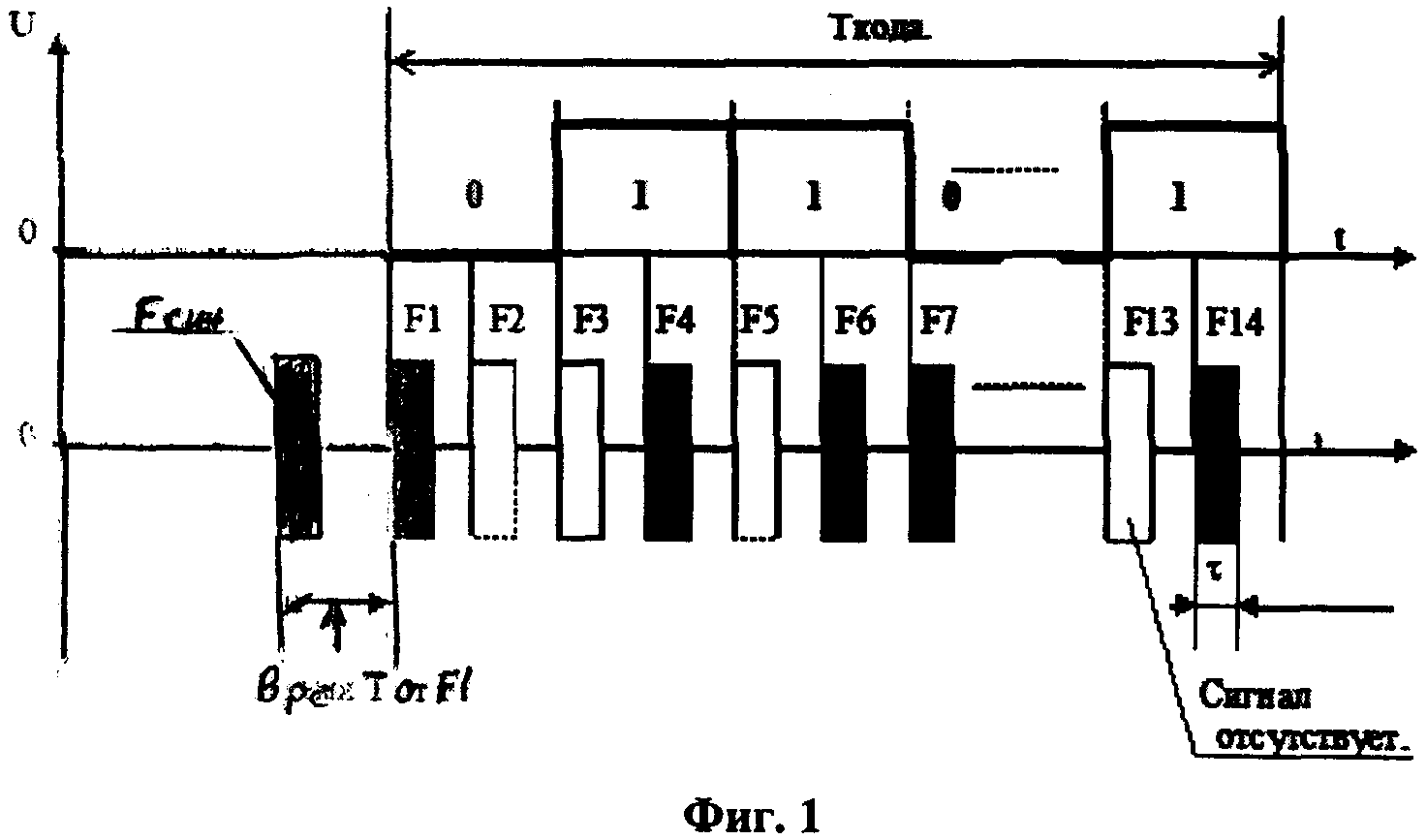
Фиг.2. Функциональная схема приемного устройства. Функциональная схема приемного устройства состоит из следующих основных узлов:
- усилителя-ограничителя 1, предназначенного для усиления и нормирования сигнала, поступающего на вход приемника с антенны;
- схемы квадратурного детектирования и фильтрации, состоящей из двух перемножителей 2 и 3, фильтров низкой частоты (ФНЧ) 4 и ФНЧ 5, генератора переменной частоты (ГЕН) 6 и схемы 7 принятия решения о наличии полезного сигнала на входе приемника;
- декодера 8 гидроакустической цифровой информации;
- схемы управления 9 частотой генератора ГЕН.
Принцип модуляции сигналов-переносчиков, т.е. сигналов, которые используются для передачи цифровой информации по радиоканалу связи, следующий.
Каждому двоичному разряду цифровых данных поставлен в соответствие сигнал, представляющий собой прямоугольный импульс длительностью, заполненный своей, отличной от других, несущей частотой. Причем логическому "0" присваиваются свои частоты, логической "1" - свои. Таким образом, цифровая информация передается различными частотами. Способ формирования сигналов, на примере семиразрядного двоичного кода, поясняется фиг.1. Здесь семиразрядное слово передается 14 различными частотами от F1 до F14. Вначале передачи формируется синхроимпульс Fсин. Теперь можно условно присвоить нечетные номера частот логическому 0, а четные номера логической 1. Тогда если первый разряд кода 0, то формируется F1, если 1, то F2; если второй разряд 0, то формируется F3, если 1, то F4 и т.д. и, наконец, если седьмой разряд 0, то формируется F13, если 1, то F14. Для того, чтобы при приеме данных не использовать два канала приемника, канала нулей и канала единиц, можно передавать импульсы, соответствующие одному разряду, разделенными во времени. Рассмотрим первый разряд, если его значение было 0, то через время Т от начала синхросигнала Fсин. формируется импульс с частотой F1, если значение разряда было 1, то импульс с частотой F2 формируется не на том временном участке, где формировался импульс с частотой F1, а позже. Место, где должен быть импульс с частотой F1 остается свободным. Такой же способ модуляции используется и для последующих разрядов.
Пример формирования посылки приведен на фиг.1.
Такой принцип модуляции сигналов-переносчиков с одновременным использованием помехоустойчивого кодирования позволяет практически полностью исключить влияние многолучевости распространения сигналов на качество приема информации и значительно упростить приемный тракт. На фиг.2 представлена функциональная схема приемного устройства.
Приемник выполнен по схеме оптимального квадратурного обнаружителя радиоимпульса со случайной фазой, который позволяет максимизировать отношение сигнал/шум и тем самым улучшить качество приема, повышая точность измерения дальности.
В отсутствии полезного сигнала приемник находится в дежурном режиме. На входы перемножителей 2 и 3 с генератора ГЕН 6 поступают непрерывные опорные напряжения Uоп с частотой Fсин, равной частоте заполнения импульса синхронизации, сдвинутые по фазе относительно друг друга на 90 градусов. Полоса пропускания ФНЧ 4 и 5 выбирается квазиоптимальной. Схема принятия решения 7 постоянно анализирует по заданному алгоритму выходные напряжения ФНЧ 4 и ФНЧ 5 us(t) и uc(t) соответственно. После прихода импульса синхронизации с частотой Fсин величины напряжений us(t) и uc(t) будут удовлетворять заданному критерию принятия решения. Схема сообщит об этом декодеру 8, подав на его вход импульс, фронт которого соответствует моменту появления полезного сигнала на входе приемника. Декодер 8, зафиксировав появление этого импульса, дает команду схеме управления 9 выключить Uоп. На входы перемножителей 2 и 3 поступает напряжение, равное 0 и прием не производится. Через время Т после приема первого импульса декодер дает команду схеме управления 9 включить опорные напряжения Uоп с частотой, равной частоте заполнения первого импульса информационного сигнала F1, которая соответствует логическому нулю первого разряда. Если сигнал с частотой F1 был принят, то декодер 8 принимает решение, чтобы принять ноль и переключает частоту опорного напряжения для приема сигнала с частотой F3, соответствующей логическому нулю второго разряда команды. Если же сигнал с частотой F1 принят не был, то декодер 8 переключает частоту опорного напряжения для приема сигнала с частотой F2, соответствующей логической единице первого разряда, и, приняв его, принимает решение, что была принята единица. После этого декодер 8 дает команду схеме управления 9 переключить частоту Uоп для приема второго разряда также, как и после приема логического нуля первого разряда. Эта процедура повторяется для каждого из семи разрядов команды, при которой частота опорного напряжения Uоп может меняться от F1 до F14. Пауза между приемом импульсов команды, т.е. когда опорное напряжение на перемножители 2,3 не подается, равна Тсек или 2Т в зависимости от того, какое логическое значение было присвоено каждому из разрядов. Если информационное слово было принято полностью, то декодер 8 идентифицирует его и посылает в буфер данных. Затем декодер 8 снова переключает ГЕН для приема синхроимпульса Fсин и прием информационных слов продолжается по выше описанному алгоритму. Количество частот и время Ткод выбирается большим, чем время корреляции замирания сигналов. Такой принцип модуляции сигналов переносчиков с одновременным использованием помехоустойчивого кодирования позволяет практически полностью исключить влияние реверберации и многолучевости распространения сигналов на качество приема информации и значительно упростить приемный тракт.
Вычислитель 1 выполнен на основе вычислительной платформы в виде системы на кристалле типа System on Chip (SoC) и состоит из процессора общего назначения, функции которого заключаются в решении навигационных уравнений и обслуживанием интерфейсов, и двух процессоров с векторно-матричными сопроцессорами, которые предназначены для полной программной обработки в реальном времени зарегистрированных сигналов.
Решение навигационных задач включает выработку поправок при анализе зарегистрированных сигналов в зависимости от скорости, курса, координат, углов бортовой и килевой качек, глубины под килем судна.
Процессоры с векторно-матричным сопроцессором (например, типа NM6403, NM6404) отличаются от процессоров общего назначения тем, что имеют дополнительный векторно-матричный сопроцессор с размером матрицы не менее 64x64, где аппаратно реализованы операции умножения с накоплением. Эти процессоры с векторно-матричным сопроцессором идеально подходят для цифровой фильтрации сигналов, умножения их отсчетов на весовые коэффициенты и накопление результатов измерений, а также для решения задачи вычисления корреляции входных сигналов, взаимнокорреляционной функции сигналов и их сопровождения по задержке.
Кроме того, на этом же кристалле (в составе вычислительной платформы) дополнительно реализуют блок предварительной обработки сигналов (БПОС), который выполняет функции аппаратной поддержки программной обработки сигналов. В БПОС реализованы цифровые режекторные фильтры узкополосных помех с конечной импульсной характеристикой (КИХ-фильтры). Здесь же реализованы буферизация и когерентное накопление оцифрованных выборок сигналов на интервалах времени, задаваемых программно, схемы предварительной сортировки цифровых отсчетов сигнала и квадратор для построения частотной панорамы с использованием спектральных методов на основе алгоритма быстрого преобразования Фурье.
Кроме того, в вычислительной платформе, выполненной в виде SoC, размещают также аналого-цифровые преобразователи АЦП входных сигналов, необходимые для работы, блоки памяти оперативной и программ, интерфейсный блок, шины внутрисистемного обмена информацией. Приемник спутниковых сигналов может использовать сигналы навигационных систем и систем их поддержек GPS, ГЛОНАСС, GALILEO, SBAS и GBAS. Приемник спутниковых сигналов может быть функционально связан с датчиками измерения углов бортовой и килевой качки, что позволяет реализовать инерциальную измерительную систему, позволяющую определять угловые и линейные скорости и ускорения в месте установки приемника, а также курс судна и необходимые поправки, которые определяются в соответствии с алгоритмами прототипа [6], в котором выработка спутниковой системой навигационных параметров коррекции базируется на измерениях дальности от объекта до навигационных спутников в три близких (около 1 с) момента времени с возможностью использования только одного спутника для коррекции автономных средств навигации подвижных объектов.
Аппаратная реализация способа спутниковой коррекции автономных средств навигации подвижных объектов выполнена на микроэлементах вычислительной техники, имеющих промышленную применимость.
Источники информации
1. Единая система инерциальной навигации и стабилизации «Ладога-М» / Пешехонов В.Г. и др. Морская радиоэлектроника. 2003. - В.1(4). - с.26-30.
2. Патент RU №2241239 С2, 27.11.2004.
3. Патент RU №2308681 С1, 20.10.2007.
4. Патент RU №2374660 С2, 27.11.2009.
5. Патент US №5570097 А, 29.10.1996.
6. Патент RU №2448326 С2, 20.04.2012.
7. Прокис Джон, Цифровая связь, М.: Радио связь, 2000 г.- с.628 - 629.
Способ спутниковой коррекции автономных средств навигации подвижных объектов, включающий автономные средства измерения местоположения, скорости и курса объекта и приемник спутниковой навигационной системы, в котором выработка спутниковой системой навигационных параметров коррекции базируется на измерениях дальности от объекта до навигационных спутников в три близких (около 1 сек) момента времени с возможностью использования только одного спутника для коррекции автономных средств навигации подвижных объектов, отличающийся тем, что передачу кодовых сообщений (цифровой информации) осуществляют на различных частотах по одному радиоканалу связи путем формирования синхроимпульса и разрядов кода логический «0» и логическая «1», при этом передают импульсы, соответствующие одному разряду, разделенные во времени.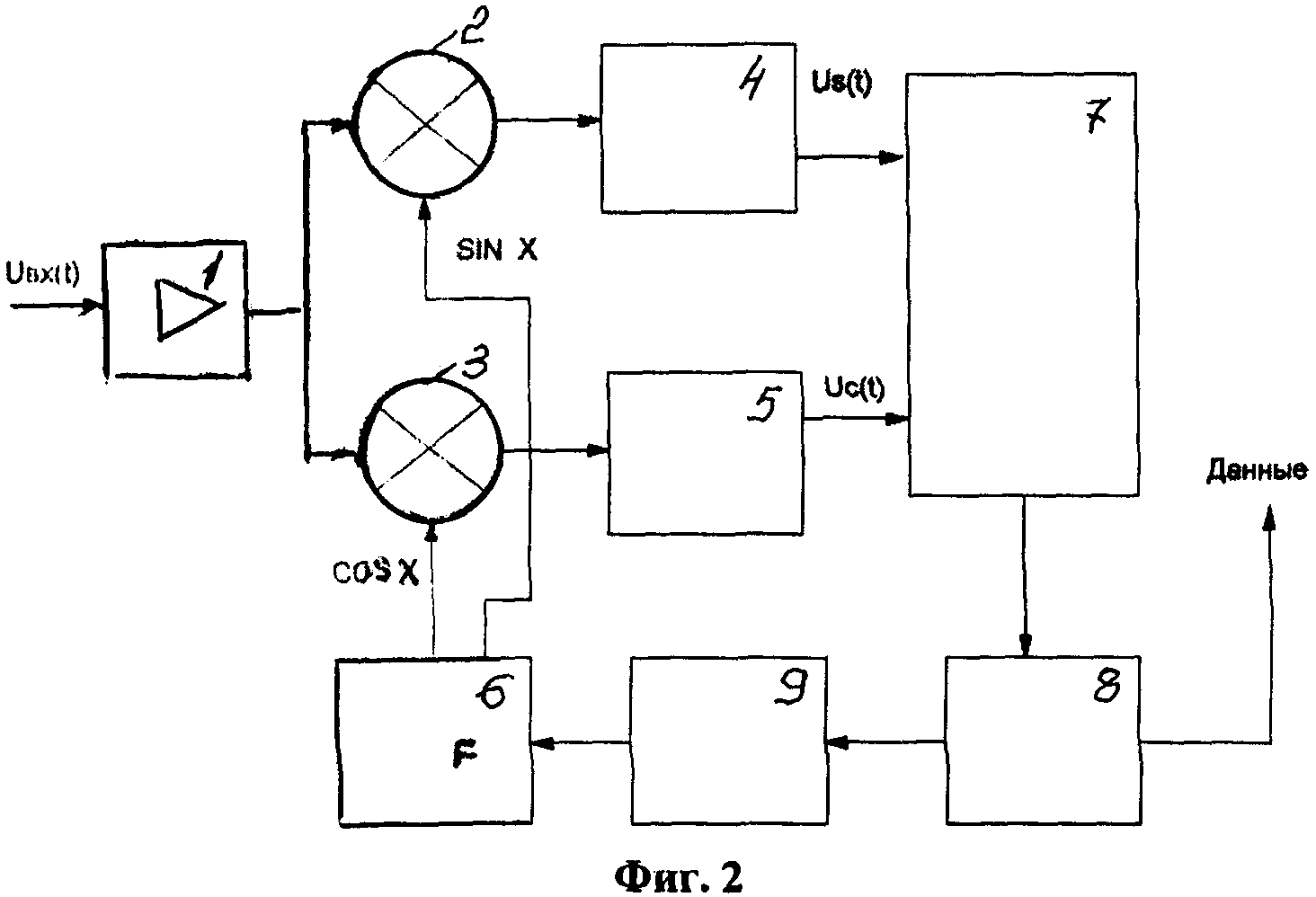
Буй для определения характеристик морских ветровых волн
Подводный робототехнический комплекс
Способ измерения высоты морских волн с борта движущегося судна
Подводная станция
Способ акустического мониторинга изменчивости параметров морских акваторий
Навигационный комплекс подвижного объекта
Способ навигации автономного необитаемого подводного аппарата
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ управления движением судна с компенсацией медленно меняющихся внешних возмущений и система управления движением судна с компенсацией медленно меняющихся внешних возмущений
Гидрохимическая донная станция для геологического мониторинга акваторий
Буй для определения характеристик морских ветровых волн
Подводный робототехнический комплекс
Способ измерения высоты морских волн с борта движущегося судна
Подводная станция
Способ акустического мониторинга изменчивости параметров морских акваторий
Навигационный комплекс подвижного объекта
Способ навигации автономного необитаемого подводного аппарата
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ управления движением судна с компенсацией медленно меняющихся внешних возмущений и система управления движением судна с компенсацией медленно меняющихся внешних возмущений
Гидрохимическая донная станция для геологического мониторинга акваторий

