Результат интеллектуальной деятельности: СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области навигации, а более конкретно к способам навигации автономных необитаемых подводных аппаратов (АНПА) как составным элементам комплексной поисково-спасательной системы, предназначенной для выполнения работ на шельфе в условиях высоких широт.
В известных системах навигации подводного автономного необитаемого аппарата задачи приведения и стыковки под водой решаются при наличии акустического (Allen В., Austin Т., Forrester N. et al. Autonomous Docking Demonstrations with Enhanced REMUS Technology // Proc. of OCEANS'06 MTS/IEEE. Boston, MA, 18-21 September, 2006. USA CD-ROM. ISBN 1-4244-0115-1. Utley C, Lee H. Signal Processing Algorithms for High-Precision Three-Dimensional Navigation and Guidance of Unmanned Undersea Vehicles (UUV) // Proc. of OCEANS'06 MTS/IEEE. Boston, MA, 18-21 September, 2006. USA CD-ROM. ISBN 1-4244-0115-1. Grant M. de Goede, Donald Norris. Recovering Unmanned Undersea Vehicles With a Homing and Docking Sonar // Proc. of OCEANS 2005 MTS/IEEE. Washington, D.C., USA, 18-23 September 2005. USA CD-ROM. ISBN 0-933957-33-5. [1-3]) или визуального (оптического) контакта в ближней зоне приведения (Inzartsev A.V., Matvienko Yu.V., Pavin A.M., Vaulin Yu.V., Scherbatyuk A.Ph. Algorithms of Autonomous Docking System Operation for Long Term AUV // Proc. of 14th Int. Symp. on Unmanned Untethered Submersible Technology (UUST05), Durham, New Hampshire, USA, August 21-24, 2005. Ваулин Ю.В., Инзарцев A.B., Матвиенко A.B., Павин A.M., Щербатюк А.Ф. Исследование работы элементов системы приведения автономного необитаемого подводного аппарата // Матер, междунар. науч.-техн. конф. «Технические проблемы освоения мирового океана». Владивосток, 14-17 сентября, 2005. Владивосток: Дальнаука, 2005, с.40-45 [4, 5]). При работе АНПА с большой автономностью и дальностью хода необходимо обеспечивать возвращение АНПА к обеспечивающему судну после выполнения длительной миссии. В этих условиях важно организовать приведение АНПА в ближнюю зону с учетом того, что накапливающиеся ошибки бортовой автономной навигации могут составлять сотни и тысячи метров.
Один из вариантов решения данной задачи связан с приведением аппарата на гидроакустический маяк, выполненный в виде буксируемой антенны или буксируемого антенного модуля, входящего в состав судовой гидроакустической навигационной системы (ГАНС) (Киселев Л.В., Инзарцев А.В., Матвиенко Ю.В., Ваулин Ю.В. Навигация и управление в подводном пространстве // Мехатроника, автоматизация, управление. 2004. №11, с.35-42 [6]). Данный подход не требует установки на аппарат дополнительного оборудования, а сводится к модификации программного обеспечения системы управления с использованием имеющихся на борту данных от приемников ГАНС. Однако использование обеспечивающего судна с буксируемым антенным модулем для выполнения посредством измерительной аппаратуры, установленной на подводном аппарате исследовательских и изыскательских работ, практически исключает использование подводных аппаратов при наличии сплоченного или дрейфующего льда, т.е. в арктических районах.
Известен также способ навигации подводного аппарата (А.М. Павин. Автоматическое приведение автономного подводного робота к гидроакустическому маяку // Подводные исследования и роботехника. 2008, №5 (1), с.32-38. [7]), который реализуется следующим образом. На подводный аппарат устанавливают средства навигации, которые включают бортовую автономную навигационную систему, обеспечивающую определение координат по принципу счисления пути; гидроакустические и спутниковые системы навигации, позволяющие определять локальные или абсолютные координаты автономного АНПА и обеспечивающего судна.
Система счисления пути, в работе которой используется информация навигационно-пилотажных датчиков-измерителей глубины, составляющих поступательной и угловой скоростей, углов курса, крена и дифферента, дает накапливающуюся ошибку порядка нескольких десятков метров за час работы в зависимости от типа используемого измерителя скорости (доплеровского или относительного лага).
Аналогично задача навигации подводных объектов решается и в известных технических решениях (патенты RU 2119172 С1, 20.09.1998 [8], RU 2084923 C1, 20.07.1997 [9], RU 52197 U1, 10.03.2006 [10], RU 102814 U1, 10.03.2011 [11], EP 1275012 B1, 15.01.2003 [12], US 20110051555 A1, 03.03.2011 [13], RU №2460043 C1, 27.08.2012 [14], RU №2456634 C1, 20.07.2012 [15]).
Увеличение отношения сигнал/шум достигается двумя способами: увеличением мощности сигнала и снижением уровня шума. Как правило, в источниках анализируемых звуковых сигналов для УКБ антенн используются пьезокерамические излучающие элементы, работающие на пределе излучаемой мощности, поэтому единственным способом усиления сигнала является увеличение его энергии за счет увеличения длительности. Увеличение длительности в тональном режиме приводит к снижению точности измерения времени пробега волны и тем самым к ухудшению характеристик навигации в целом. Единственным реальным способом увеличения энергии сигнала без ухудшения разрешающей способности системы по дальности является использование сложных сигналов. Такие системы известны, например типа «POSIDONIA» компании IXSEA OCEANO. Однако использование сложных сигналов требует, с одной стороны, значительного повышения производительности процессоров в транспондерах и бортовой антенне, а с другой, сокращает время жизни акустических ответчиков в автономном режиме при фиксированном ресурсе источников питания.
Окружающий шум в точке приема имеет сложный частотный и пространственный спектры, и его эффективный уровень может быть снижен за счет ограничения чувствительности приемников в областях, заведомо не содержащих полезной информации. Ограничение чувствительности в частотной области достигается оптимальной фильтрацией сигналов, ограничение чувствительности в пространственной области - пассивным или активным формированием диаграммы направленности. Пассивное формирование достигается применением отражающих и заглушающих элементов в конструкции антенны, которые ослабляют звуковые волны с нежелательных направлений. Такой способ применяется в большинстве известных УКБ систем и является весьма эффективным и относительно дешевым, однако не позволяет максимально сузить пространственный спектр анализируемого сигнала и добиться минимально возможного уровня шума. Активное формирование направленности достигается использованием многоэлементных фазируемых решеток и применяется, например, в системе «HIPAP-500» компании Kongsberg. Этот способ формирования диаграммы приема дает наилучшие результаты, однако реализация антенн такого типа является очень сложной и дорогостоящей задачей. Так, в системе HIPAP-500 используют сотни независимых приемных каналов, по которым осуществляются синхронный прием и обработка в реальном времени поступающей информации.
Известные способы навигации [1-15] АНПА включают определение места (координат) по маякам-ответчикам, и отягощены необходимостью установки маяков-ответчиков, их привязки к месту установки. Выполнение данных работ отягощено существенными трудозатратами и не во всех случаях позволяет достичь необходимого результата.
Известны также способы навигации подводных аппаратов (навигационная система TERCOM (Terrain Contour Matching) britannica.com>EBehecked/topic/587825/Tercom [16]) по рельефу дна.
При автономной навигации движущегося подводного аппарата управляющие воздействия формируются по принципу обратной связи в виде функций от измеряемых величин. Во время движения в системе счисления координат - в инерциальной навигационной системе (ИНС), построенной на гироскопах и акселерометрах, накапливаются большие погрешности, поэтому реализующаяся траектория может значительно отличаться от истинной.
Эффективным средством коррекции накопленных ошибок является использование информации о рельефе дна, наблюдаемого в процессе движения.
Все существующие способы навигации подводных аппаратов по рельефу дна имеют общее ядро. Оно состоит в следующем. Имеются эталонные значения глубин. Они представляют собой эталонную регулярную сетку точек глубин, полученную по предварительным измерениям рельефа дна. Подводный аппарат в процессе навигации измеряет рельеф дна бортовой акустической аппаратурой, формирует регулярную сетку точек измеренных глубин и затем сравнивает полученные значения глубин с эталонными.
Для всех существующих методов общим принципом методов сравнения является корреляционно-экстремальный подход, который основан на поиске экстремума некоторого функционала сравнения полученных измерений рельефа дна с априорной (эталонной) информацией о нем, хранящейся в памяти бортового вычислительного устройства.
Классический алгоритм корреляционной обработки для оценки сходства измеренных глубин на борту подводного аппарата с эталонными основан на вычислении функции взаимной корреляции с последующим поиском ее максимума:

где x, y - плановые координаты района навигации, fsh(x, y), fth(x, y) - регулярные сетки эталонных и текущих измерений глубин, p, q - линейные величины возможного смещения сетки глубин текущих измерений, N, M - число столбцов и строк в сетке.
В основу системы TERCOM положен следующий принцип: географическое положение любой точки земной поверхности (дна моря) описывается единственным образом с помощью вертикальных профилей глубин. Такая система также требует предварительного картографирования профилей поверхности рельефа дна того района, над которым подводный аппарат будет использоваться. Предварительно определенные данные о рельефе района полетов запоминаются в цифровом виде в бортовом запоминающем устройстве. Во время плавания система TERCOM измеряет вертикальный профиль рельефа дна вдоль истинной траектории полета с помощью эхолота. Вычитая текущую глубину, измеренную датчиком давления, система определяет профиль рельефа дна вдоль траектории плавания и организует поиск в памяти вычислителя наиболее "похожего", заранее запомненного профиля с известными координатами.
Очевидно, что все существующие корреляционно-экстремальные навигационные системы без исключения чувствительны к взаимным геометрическим искажениям, то есть к взаимному повороту, сдвигу и изменению масштаба. Действительно, подводный аппарат не может абсолютно точно и постоянно следовать в определенном направлении и на постоянном уровне от поверхности моря. Поэтому принципиально невозможно согласовать направления эталонной сетки глубин и направления плавания, а также выдержать согласование пространственных масштабов измерения глубин. Все это существенно ограничивает точность этих методов. Кроме того, коэффициент корреляции, являясь интегральным параметром, не дает возможности различить траектории с близкими значениями коэффициентов корреляции.
Задачей заявляемого технического решения является снижение трудозатрат при производстве подводных работ с использованием АНПА.
Поставленная задача решается за счет того, что в способе навигации автономного необитаемого подводного аппарата, включающем определение координат места по подводным ориентирам путем измерения рельефа дна бортовой акустической аппаратурой, формирование регулярной сетки точек измеренных глубин и сравнение полученных значений глубин с эталонными глубинами, в котором при определении координат места по подводным ориентирам определяют скорость погружения автономного необитаемого подводного аппарата посредством лага для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности, который выполнен в виде индукционного измерителя продольной и поперечной составляющих скорости и угла дрейфа и дополнительно снабжен n приемными датчиками, расположенными в носовой и кормовой частях корпуса автономного необитаемого подводного аппарата, выполняют измерения гидрологических параметров посредством гидролокатора бокового обзора, профилографа, измерителей температуры и электропроводности, и скорости звука в морской среде, по измеренным глубинам восстанавливают рельеф местности, путем построения деревьев Кронрода-Риба, при сравнении измеренных значений глубин с эталонными значениями, при совпадении координат критических глубин, вводят их для корректировки инерциальной навигационной системы автономного необитаемого подводного аппарата.
Сущность предлагаемого технического решения поясняется чертежами (фиг. 1-3).
Фиг. 1. Принцип работы системы TERCOM.
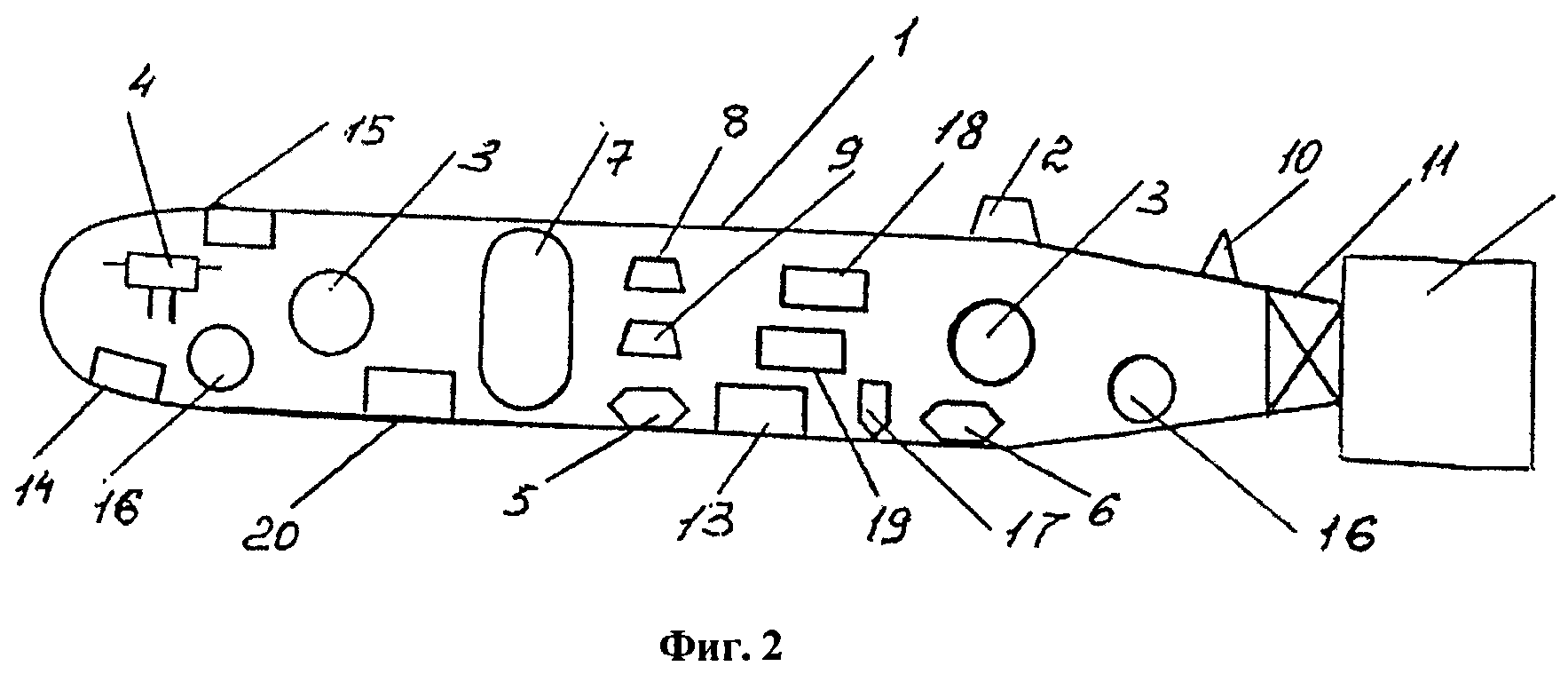
Фиг. 2. Система навигации автономного необитаемого подводного аппарата 1, которая включает блоки гидроакустической системы телеуправления и связи 2, навигационно-пилотажные датчики 3, локальную вычислительную сеть 4, гидроакустический доплеровский лаг 5 для измерения скорости автономного необитаемого подводного аппарата относительно морского дна, лаг 6 для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности, инерциальную навигационную систему 7, магнитный компас 8, гирокомпас 9, измеритель глубины 10, систему управления 11 рулевыми механизмами 12, а еще автономный необитаемый подводный аппарат оснащен аппаратурой для выполнения гидрологических исследований, включающей гидролокатор бокового обзора 13, профилограф 14, измерители 15 температуры и электропроводности морской среды, фотокамеры 16, мобильный измеритель 17 скорости звука, электронную картографическую навигационную информационную систему 18 и видео-плоттер 19, многолучевой эхолот 20.
Лаг 6 для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности выполнен в виде индукционного измерителя продольной и поперечной составляющих скорости и угла дрейфа и дополнительно снабжен n приемными датчиками, расположенными в носовой и кормовой частях корпуса автономного необитаемого подводного аппарата для определения скорости погружения автономного необитаемого подводного аппарата.
Гирокомпас 9 выполнен в виде корректируемого гирокомпаса, построенного на базе динамически настраиваемого гироскопа и кварцевых акселерометров.
Инерциальная навигационная система 7 построена на основе прецизионного гироскопа с электростатическим подвесом ротора.
Многолучевой эхолот 20 служит для измерения глубин в некоторой полосе по курсу плавания подводного аппарата.
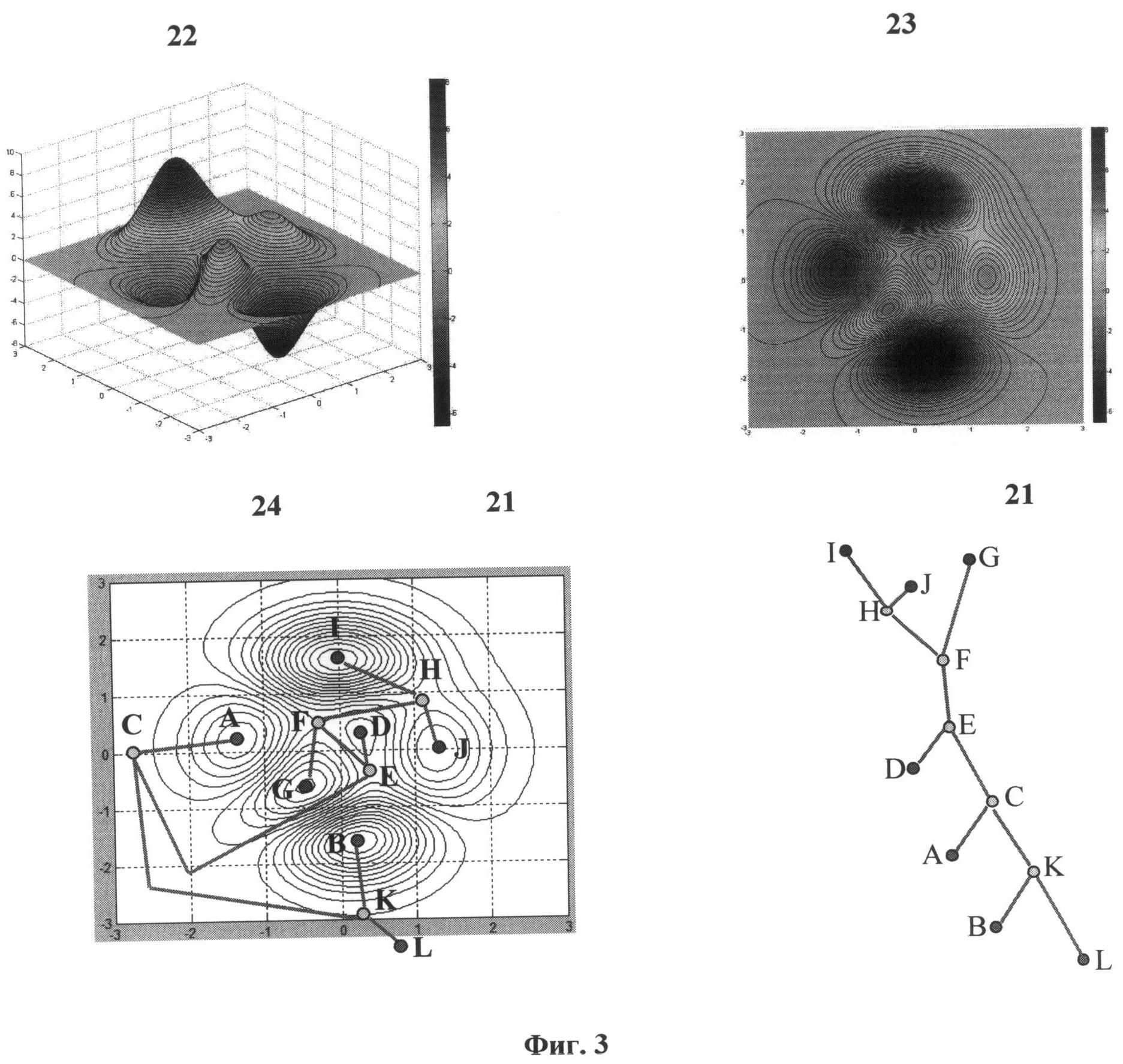
Фиг. 3. Граф Кронрода-Риба 21 для функций вида 22 и 23. Вложение графа Кронрода-Риба 21 в плоскость 24 контурного рисунка функции, точки (I,H,J) - максимумы, точки (D,A,D,L) - минимумы, точки (F,E,C,K) - седла.
Исключить выявленные проблемы в задаче навигации по рельефу можно путем использования структуры рельефа дна дискретно описывающей картографическое представление рельефа дна. Эта структура возникает при условии, что поверхность рельефа дна можно интерпретировать в виде гладкой двумерной функции, у которой существуют только изолированные простые критические точки: минимумы, максимумы и седловые (Жуков Ю.Н. Математические инструменты описания картографического отображения рельефа Земли // Навигация и гидрография, 2011, №32, стр.60-69 [17]).
Этим терминам в геоморфологии соответствуют географические понятия вершины горы, положения максимума впадины и перевала. Указанные критические точки упорядочиваются специальным образом. Это упорядочение позволяет критические точки организовать в виде специального графа, называемого деревом Кронрода-Риба. Иллюстративный пример этой структуры представлен на фиг.3.
При таком способе описания рельефа дна положение подводного объекта определяется по степени сходства двух структур деревьев Кронрода-Риба. Одно дерево - эталонное, другое строится на борту подводного аппарата. При этом сравниваются координаты местоположения критических точек, их глубины и наличия ребер связей между ними.
Основное преимущество применения этого способа состоит в том, что в этом случае необходимо только сравнение точечных объектов (их координаты и глубины) между собой. Этих объектов незначительное число, они представляют собой естественные особенности поверхности рельефа. И главное, очевидно, что при этом полностью отсутствуют присущие традиционным методам проблемы с пространственной ориентацией подводного аппарата и различным пространственным масштабом измерений глубин.
Способ реализуется следующим образом.
При проведении исследований, например, на акватории размещения подводного объекта хозяйственной деятельности, перед спуском на воду АНПА в инерциальную навигационную систему 7 автономного необитаемого подводного аппарата 1 вводят координаты места его погружения, в электронную картографическую навигационную информационную систему 18 загружают цифровые карты рельефа дна, критические точки (горы, впадины и перевалы), содержащие эталонные деревья Кронрода-Риба.
По заданной программе выполняют плавание и измерение гидрологических параметров посредством аппаратуры для выполнения гидрологических исследований, включающей гидролокатор бокового обзора 13, профилограф 14, измерители 15 температуры и электропроводности морской среды, фотокамеры 16, мобильный измеритель 17 скорости звука.
Плавание выполняют с использованием информации от навигационно-пилотажных датчиков 3, гидроакустического доплеровского лага 5, лага 6 для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности, инерциальной навигационной системы 7, магнитного компаса 8, гирокомпаса 9, измерителя глубины 10, системы управления 11 рулевыми механизмами 12. При этом посредством многолучевого эхолота 20 и видео-плоттера 19 выполняют батиметрическую съемку. По измеренным глубинам восстанавливают рельеф местности с построением деревьев Кронрода-Риба и сравнивают их с эталонными значениями. При совпадении координат критических точек вводят их для корректировки инерциальной навигационной системы 7.
В предлагаемый способ навигации автономного необитаемого подводного аппарата, путем сравнения двух представлений рельефа дна (эталонного и непосредственно измеренного) для задачи навигации подводного аппарата, в отличие от традиционных способов сравнение осуществляется между регулярными массивами точек глубин, представляющих непрерывную поверхность рельефа дна. Принципиальной особенностью предлагаемого способа является дискретное представление поверхности рельефа дна в виде специальной структуры. При этом исключаются погрешности за счет рысканья по курсу движения подводного аппарата и разномасштабности эталонных и измеренных данных о рельефе дна.
Реализация способа технической сложности не представляет, так как способ может быть реализован на штатной судовой аппаратуре.
Источники информации
1. Allen В., Austin Т., Forrester N. et al. Autonomous Docking Demonstrations with Enhanced REMUS Technology // Proc. of OCEANS'06 MTS/IEEE. Boston, MA, 18-21 September, 2006. USA CD-ROM. ISBN 1-4244-0115-1.
2. Utley C, Lee H. Signal Processing Algorithms for High-Precision Three-Dimensional Navigation and Guidance of Unmanned Undersea Vehicles (UUV) // Proc. of OCEANS'06 MTS/IEEE. Boston, MA, 18-21 September, 2006. USA CD-ROM. ISBN 1-4244-0115-1.
3. Grant M. de Goede, Donald Norris. Recovering Unmanned Undersea Vehicles With a Homing and Docking Sonar // Proc. of OCEANS 2005 MTS/IEEE. Washington, D.C., USA, 18-23 September 2005. USA CD-ROM. ISBN 0-933957-33-5.
4. Inzartsev A.V., Matvienko Yu.V., Pavin A.M., Vaulin Yu.V., Scherbatyuk A.Ph. Algorithms of Autonomous Docking System Operation for Long Term AUV // Proc. of 14th Int. Symp. on Unmanned Untethered Submersible Technology (UUST05), Durham, New Hampshire, USA, August 21-24, 2005.
5. Ваулин Ю.В., Инзарцев A.B., Матвиенко A.B., Павин A.M., Щербатюк А.Ф. Исследование работы элементов системы приведения автономного необитаемого подводного аппарата // Матер, междунар. науч.-техн. конф. «Технические проблемы освоения мирового океана». Владивосток, 14-17 сентября, 2005. Владивосток: Дальнаука, 2005, с.40-45.
6. Киселев Л.В., Инзарцев А.В., Матвиенко Ю.В., Ваулин Ю.В. Навигация и управление в подводном пространстве // Мехатроника, автоматизация, управление. 2004. №11, с.35-42.
7. А.М. Павин. Автоматическое приведение автономного подводного робота к гидроакустическому маяку // Подводные исследования и роботехника. 2008, №5(1), с.32-38.
8. Патент RU №2119172 C1, 20.09.1998.
9. Патент RU №2084923 C1, 20.07.1997.
10. Патент RU №52197 U1, 10.03.2006.
11. Патент RU №102814 U1, 10.03.2011.
12. Патент EP №1275012 B1, 15.01.2003.
13. Заявка US №20110051555 A1, 03.03.2011.
14. Патент RU №2460043 C1, 27.08.2012.
15. Патент RU №2456634 C1, 20.07.2012.
16. Система TERCOM (britannica.com>EBehecked/topic/587825/Tercom).
17. Жуков Ю.Н. Математические инструменты описания картографического отображения рельефа Земли // Навигация и гидрография, 2011, №32, с.60-69.
Способ навигации автономного необитаемого подводного аппарата, включающий определение координат места по подводным ориентирам, путем измерения рельефа дна бортовой акустической аппаратурой, формирование регулярной сетки точек измеренных глубин и сравнение полученных значений глубин с эталонными глубинами, отличающийся тем, что при определении координат места по подводным ориентирам определяют скорость погружения автономного необитаемого подводного аппарата посредством лага для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности, который выполнен в виде индукционного измерителя продольной и поперечной составляющих скорости и угла дрейфа и дополнительно снабжен n приемными датчиками, расположенными в носовой и кормовой частях корпуса автономного необитаемого подводного аппарата, выполняют измерения гидрологических параметров посредством гидролокатора бокового обзора, профилографа, измерителей температуры и электропроводности и скорости звука в морской среде, по измеренным глубинам восстанавливают рельеф местности путем построения деревьев Кронрода-Риба, при сравнении измеренных значений глубин с эталонными значениями при совпадении координат критических глубин вводят их для корректировки инерциальной навигационной системы автономного необитаемого подводного аппарата.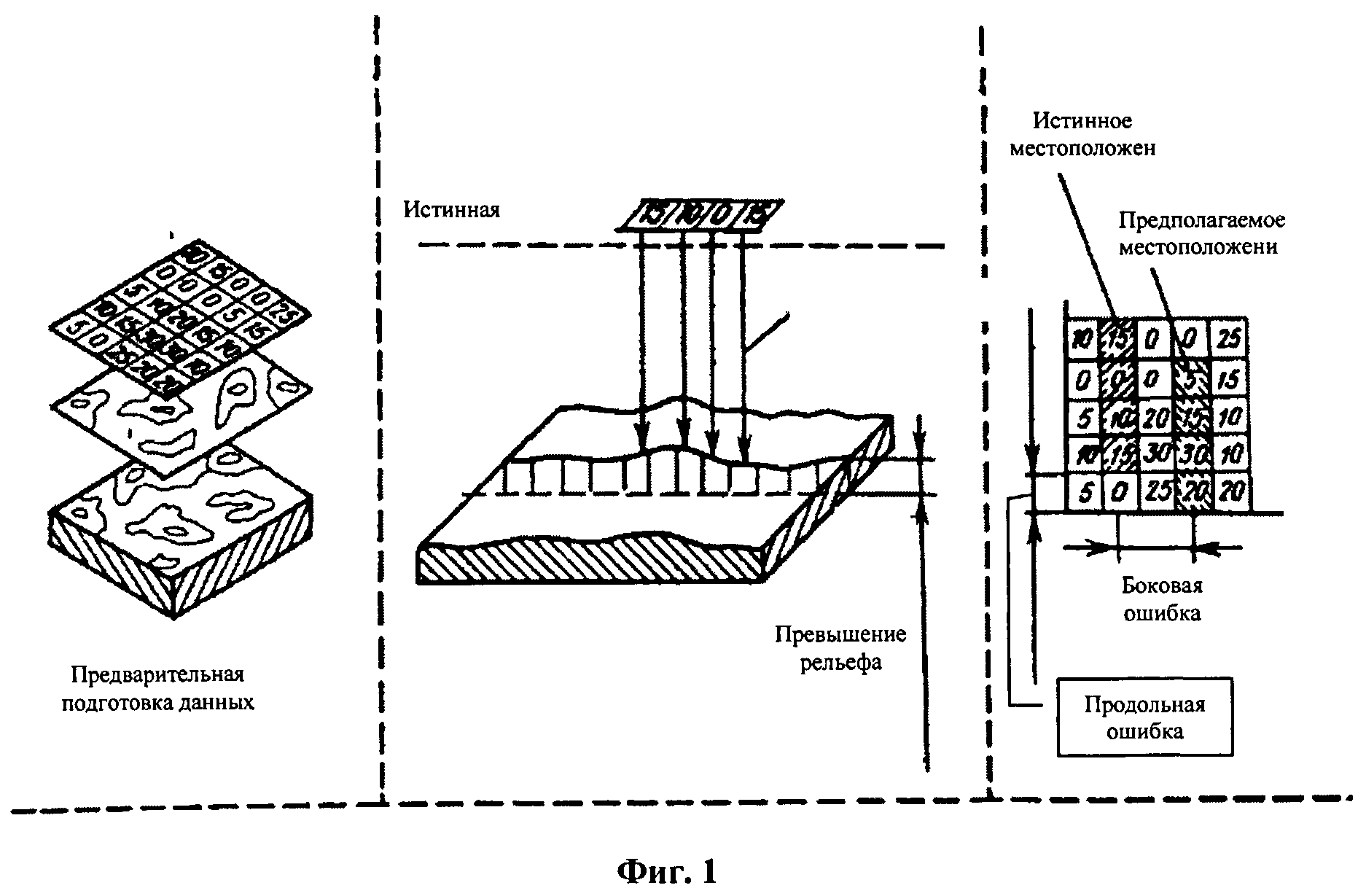
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Камера спасательная всплывающая
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Камера спасательная всплывающая
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов

