Результат интеллектуальной деятельности: СПОСОБ РАЗМЕЩЕНИЯ ВЫСОТНОЙ ПЛАТФОРМЫ И ВЫСОТНАЯ ПЛАТФОРМА
Вид РИД
Изобретение
Изобретение относится к области авиации и воздухоплавания и может быть использовано при создании высотной стратосферной платформы, являющейся альтернативой геостационарным космическим аппаратам. Высотная платформа предназначена для подъема полезной нагрузки на высоту 15-25 км (высоту велопаузы и тропопаузы) и способна находиться в заданной точке в течение продолжительного времени.
Известны несколько вариантов создания высотной стратосферной платформы с использованием аэростатического модуля (высотный дирижабль) и самолетного модуля, а также гибридные варианты.
Реализованный проект высотного дирижабля с силовой установкой на солнечной энергии наиболее полно отражен в патенте US 6607163 В2 от 19.08.2003, МПК B64B 29/00. В соответствии с описанной в патенте конструкцией был построен и успешно испытан высотный дирижабль.
В патенте US 4415133 от 15.11.1983, МПК B64D 27/02 показана конструкция высотного самолета с силовой установкой на солнечной энергии. Для данной конструкции характерно оригинальное сочетание вертикальных и горизонтальных поверхностей, создающих подъемную силу и служащих для размещения солнечных элементов. В настоящее время известно несколько проектов экспериментальных высотных самолетов на солнечной энергии с большой продолжительностью полета-Helios, Centurion, NASAPathfinder-Plus (http://www.nasa.gov/centers/dryden /news/FactSheets/FS-054-DFRC.htmn).
Данные экспериментальные аппараты рассчитаны на использование солнечной энергии в светлое время суток и аккумулированной днем энергии для их удержания ночью в заданной точке пространства относительно земли. Основная часть энергии в случае реализации аэростатического варианта необходима для перемещения высотного дирижабля в атмосфере со скоростью ветрового потока и удержания его в заданной точке относительно земной поверхности.
Самолетный вариант потребляет энергию, необходимую для создания аэродинамической подъемной силы, и, как правило, имеет крейсерскую скорость, превышающую скорость ветрового потока.
Использование солнечной энергии позволяет для данных типов ЛА добиться теоретически неограниченной продолжительности полета. В настоящее время достигнута продолжительность полета в несколько суток для самолетного варианта, но при полетах в экваториальной зоне.
Однако данные концепции имеют ряд существенных недостатков. Использование солнечной энергии требует размещения солнечных элементов на конструкции ЛА (в крыле и стабилизаторе для самолетного варианта, на оболочке или специальном пилоне для дирижабля) и системы аккумулирования, которые в сумме составляют более 50% взлетного веса ЛА и являются основным фактором, влияющим на размерность и стоимость ЛА. При этом масса полезной нагрузки составляет всего 3-8% от общей взлетной массы при реализации варианта, рассчитанного на непрерывное круглогодичное барражирование. Роль этих факторов увеличивается при проектировании высотной платформы для полетов в широтах 50-60° северной широты (с.ш.), что особенно актуально для нашей страны.
Известны способ и устройство создания связок летательных аппаратов для реализации высотной платформы. Например, европейский патент ЕР 0385921 В1 от 05.09.1990, МПК B64D 1/22, B64D 27/24, B64C 37/02, взятый за прототип. В данном патенте описана связка летательных аппаратов (ЛА), представляющая собой аэростатический летательный аппарат, соединенный посредством кабель-тросов с тремя беспилотными самолетами, которые, двигаясь по круговой траектории относительно точки крепления, обеспечивают аэростатическому летательному аппарату фиксацию в заданной точке пространства. Необходимое усилие и перемещение системы в направлении, противоположном направлению воздушного потока относительно земли, происходит за счет натяжения троса, связывающего беспилотный самолет с аэростатическим аппаратом во время его движения в секторе круга, совпадающего с требуемым вектором перемещения.
Полезная нагрузка размещается на аэростатическом аппарате. Беспилотные самолеты имеют максимально упрощенную конструкцию и электрическую силовую установку.
Предлагается несколько вариантов энергоснабжения платформы: посредством размещенной на аэростате батареи солнечных элементов; посредством передачи микроволновой энергии от наземной станции к антенне, размещенной на аэростате; с помощью кабель-троса от наземного источника. Энергия от аэростата к беспилотным самолетам передается через соединяющие их кабель-тросы.
Питание всей платформы посредством солнечной энергии имеет уже описанные выше недостатки при обеспечении продолжительного полета. Использование микроволновой энергии потребует создания мощной передающей станции. Передача электроэнергии по кабель-тросу на высоту выше 15000 м потребует большой длины троса, и, соответственно, его масса будет составлять значительную долю в массе всей системы. Также последние 2 варианта энергообеспечения не обеспечивают мобильности комплекса. Данная система не использует энергии ветровых потоков.
Задачей и техническим результатом настоящего изобретения является создание высотной платформы, использующей энергию ветровых потоков и обеспечивающей продолжительное барражирование при сохранении невысокой стоимости самой системы и стоимости ее жизненного цикла.
Технический результат достигается тем, что в способе размещения высотной платформы, состоящей из связки летательных аппаратов, заключающемся в подъеме платформы на заданную высоту, снабжении энергией и удержании в заданной точке, летательные аппараты располагают в устойчивых ветровых потоках, движущихся с различной относительно земли скоростью и (или) в различном направлении, а удержание данной связки в заданной точке или передвижение ее относительно земли в заданном направлении обеспечивают с помощью аэродинамических органов управления и силовых установок нескольких летательных аппаратов связки, используя разность энергий ветровых потоков при сохранении постоянной высоты полета, и (или) за счет энергии, полученной от ветрогенератора, установленного на одном из летательных аппаратов связки, и передаваемой через кабель-трос на силовые установки других (другого) летательных аппаратов, причем полезную нагрузку размещают или на летательных аппаратах, или на кабель-тросе, соединяющем летательные аппараты.
Технический результат достигается также тем, что высотная платформа, включающая связку из нескольких летательных аппаратов, снабженных аэродинамическими органами управления, системами автоматического управления и силовыми установками и соединенных между собой посредством гибкого кабель-троса, обеспечивающего передачу усилий и содержащего каналы передачи электроэнергии и информационного управляющего сигнала от одного аппарата к другому, содержит в связке любые типы летательных аппаратов, причем на одном из летательных аппаратов связки установлен ветрогенератор.
Технический результат достигается также тем, что в высотную платформу, включающую связку из нескольких летательных аппаратов, входят летательные аппараты одинаковых типов.
Технический результат достигается также тем, что в высотную платформу, включающую связку из нескольких летательных аппаратов, входят летательные аппараты разных типов.
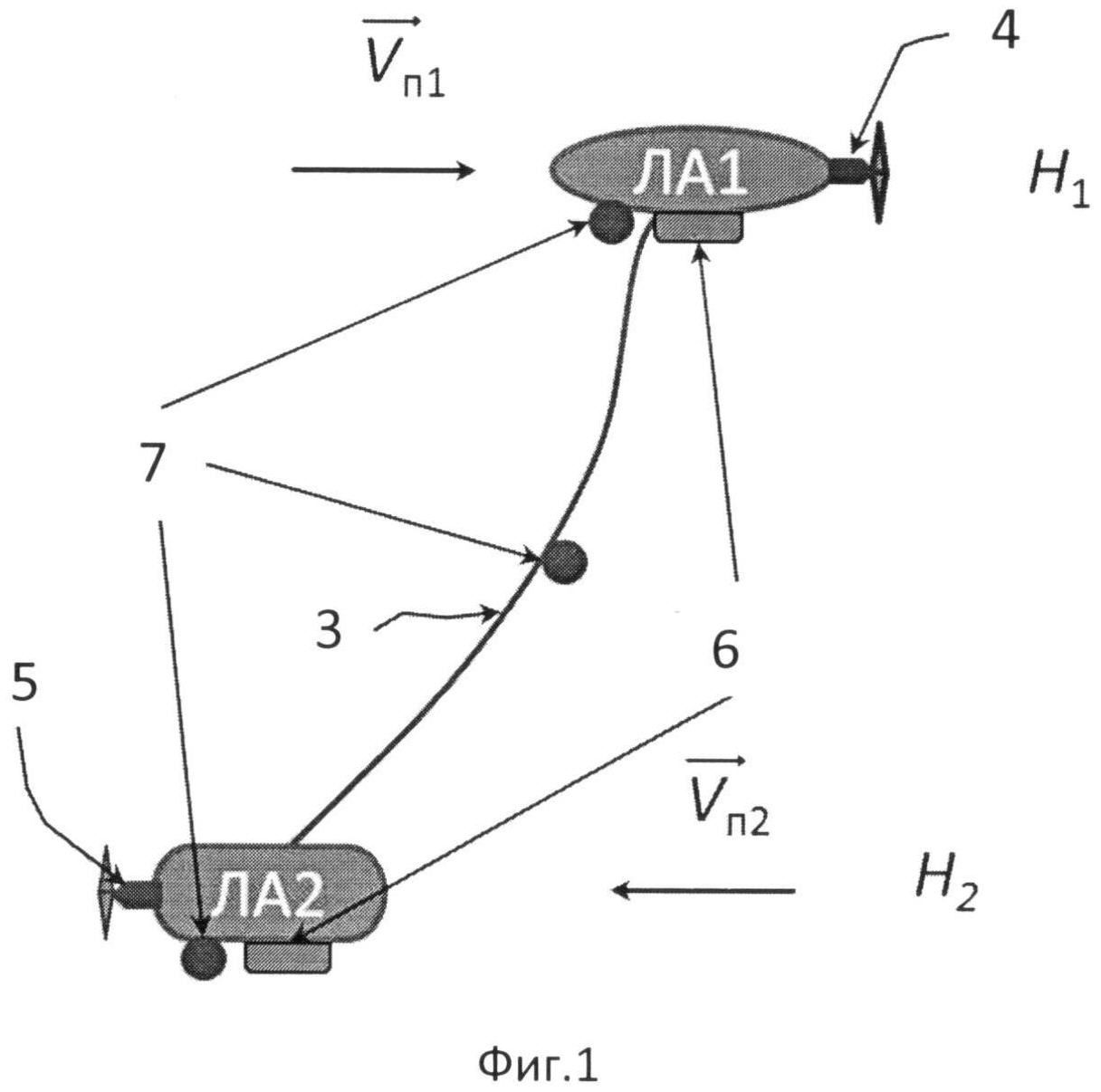
На фиг.1 - высотная платформа - связка летательных аппаратов.
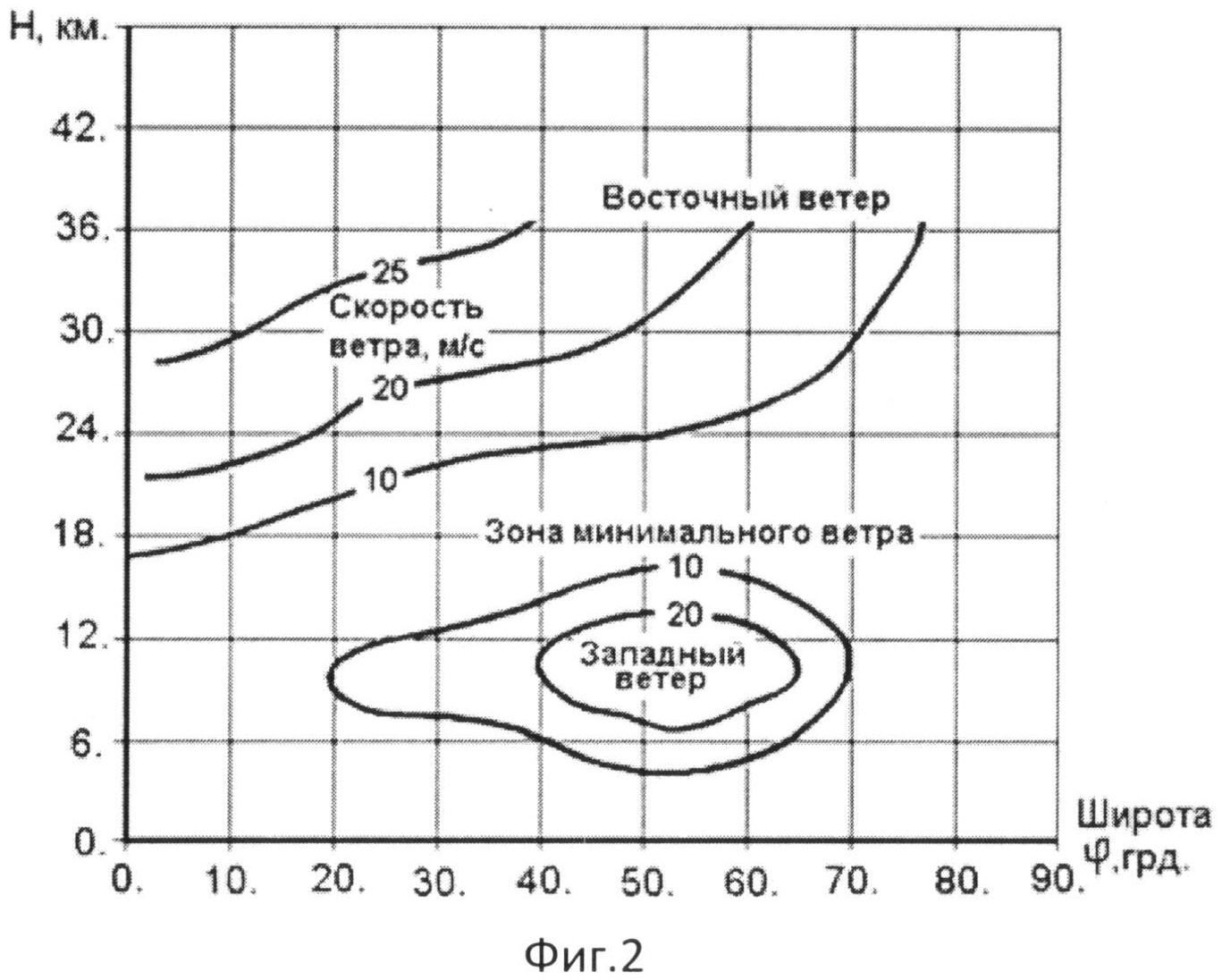
На фиг.2 - широтное распределение скоростей и направлений ветра в летний период времени.
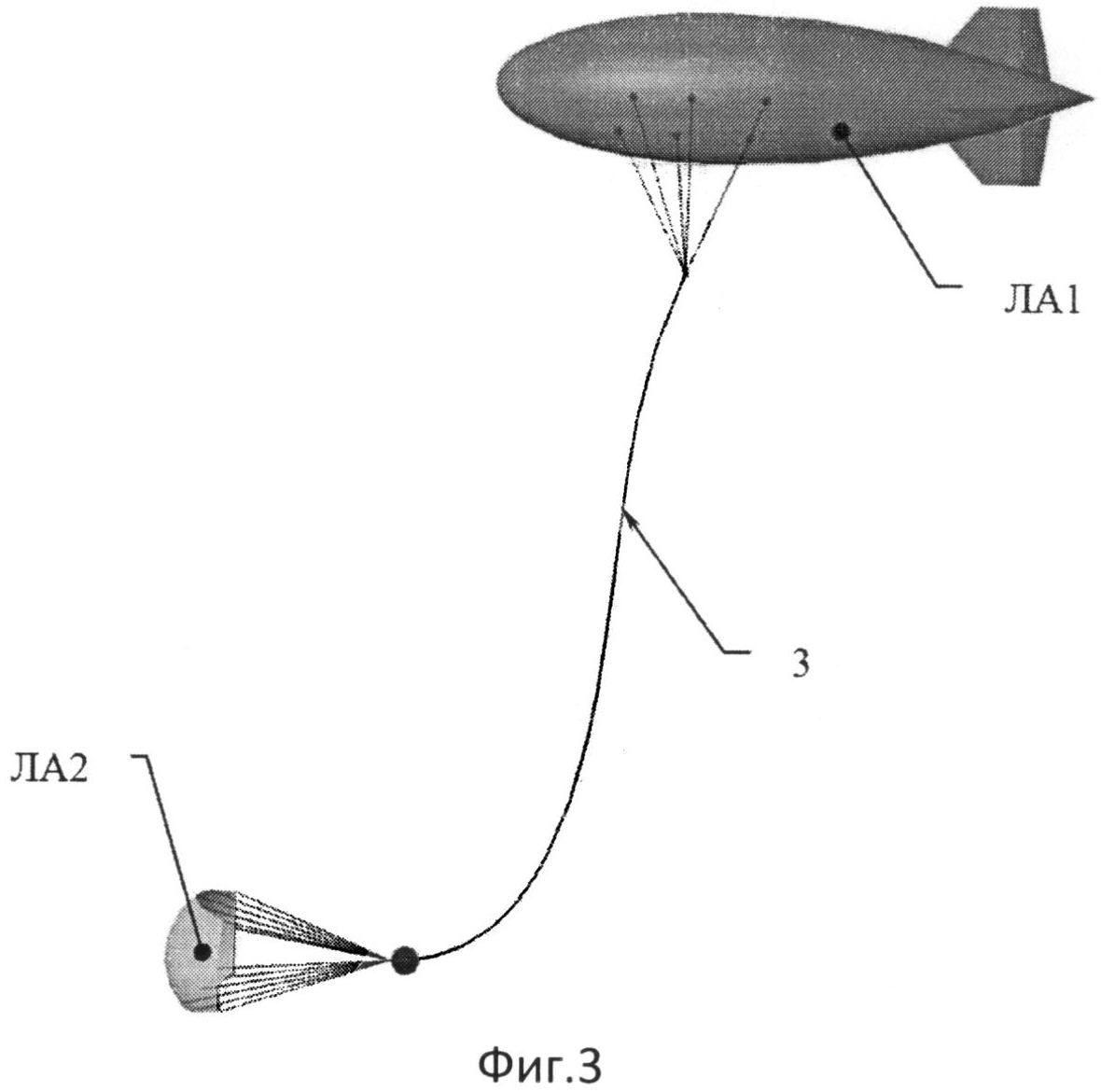
На фиг.3 - вариант реализации связки из привязного аэростата и парашютной системы.
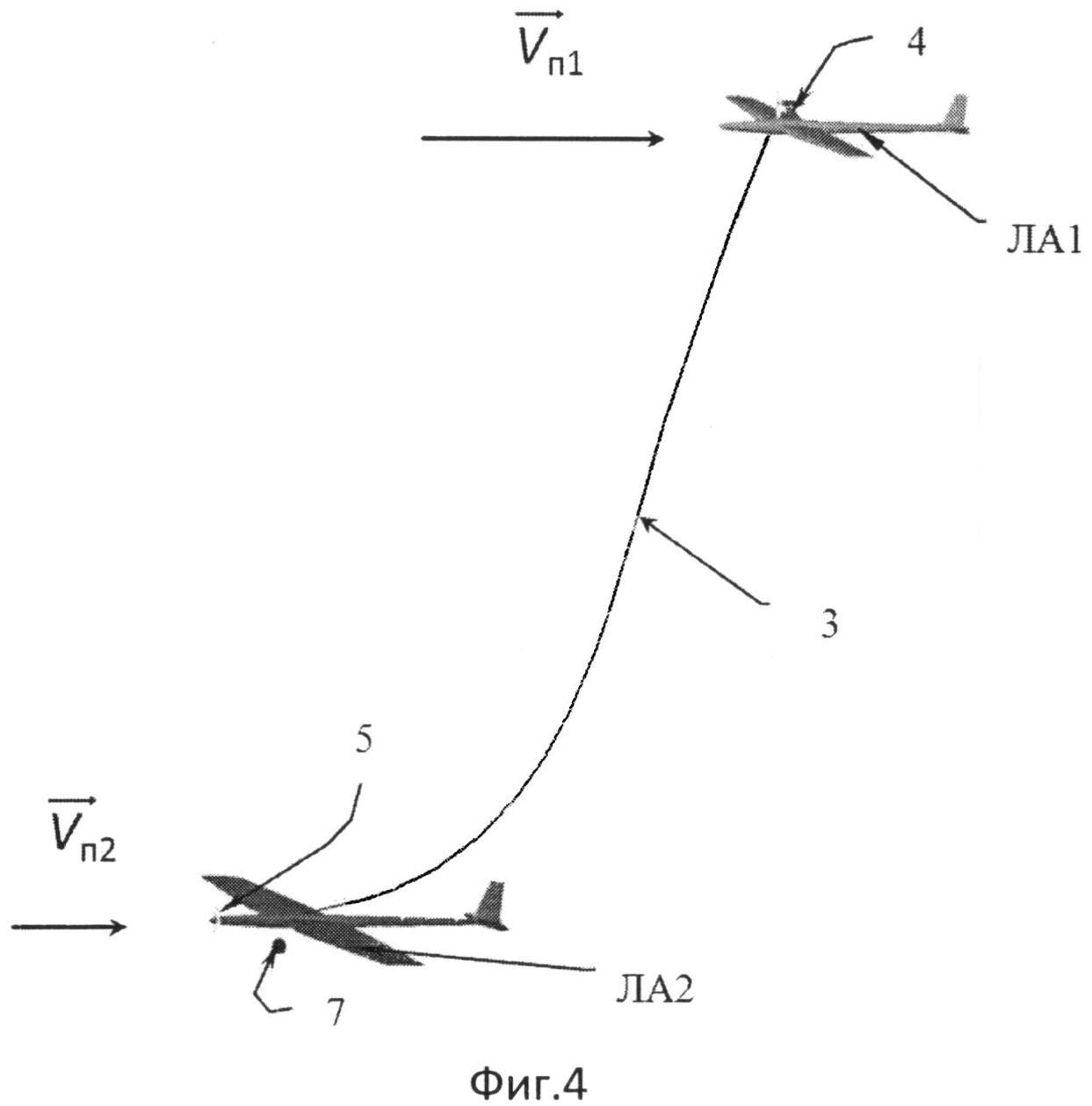
На фиг.4 - вариант реализации связки из планера с ветрогенератором и самолета с электрической силовой установкой.
На фиг.5 - схема сил, действующих на связку.
Высотная платформа - связка летательных аппаратов, как показано на фиг.1, представляет собой летательные аппараты ЛА1 и ЛА2, находящиеся на различных высотах H1 и H2, соединенные между собой кабель-тросом 3, который обеспечивает передачу нагрузок, электроэнергии и сигнала управления от одного ЛА к другому. На ЛА1 размещается ветрогенератор 4, а на ЛА2 - силовая установка с электрическим двигателем 5. Возможно также и обратное размещение ветрогенератора и силовой установки либо комплектация обоих ЛА и ветрогенератором, и силовой установкой в зависимости от ветровых условий полета высотной платформы, величины и направления скорости воздушных потоков Vп1 и Vп2.
При необходимости ЛА1 и ЛА2 могут иметь систему накопления электроэнергии 6 (аккумуляторные, конденсаторные батареи, систему накопления с использованием электрохимического генератора) для компенсации суточных колебаний скорости ветровых потоков. Полезная нагрузка 7 может быть размещена как на ЛА1, так и на ЛА2, а также на кабель-тросе, если необходимо размещение элементов антенны для обеспечения ретрансляции. Данная схема на фиг.1 описывает конструктивную схему связки 2-х ЛА, однако при необходимости в связку может быть включено большее количество ЛА.
Суть данного изобретения заключается в использовании энергии ветровых потоков земной атмосферы, движущихся с разной скоростью и (или) в разных направлениях. Наиболее реально для реализации данной идеи использовать высоты 17-23 км. Исследования атмосферы на высотах 15-25 км показали (фиг.2), что в данном диапазоне высот существуют постоянные течения воздушных масс по направлению от экватора к полюсам на высотах 15-19 км и в противоположном направлении 19-25 км. Пограничная зона между этими противоположными потоками называется велопаузой и характеризуется малой скоростью ветра 0-15 м/с относительно земли в течение летнего периода (с апреля по ноябрь).
Размеры данной зоны по высоте могут составлять ~2-3 км. Таким образом, мы имеем две воздушные среды, движущиеся в противоположных относительно земной поверхности направлениях и разграниченные между собой переходной областью в летний период.
В зимний период в диапазоне высот 15÷25 км существуют пограничные высотные зоны с одинаковым направлением ветра, но со значительной разницей в скорости ветрового потока. Эти течения имеют достаточно устойчивый характер в течение всего календарного года и действуют в областях от экваториальной зоны до северного и южного полярных кругов.
Расположив летательный аппарат так, чтобы он имел физическую связь между двумя противоположными потоками или потоками, имеющими значительную разницу в скорости, используют энергию движущихся сред для удержания аппарата в заданной точке и (или) для его перемещения с небольшой скоростью. Этот способ перемещения аналогичен принципу перемещения парусного корабля, использующего энергию ветра для передвижения по поверхности воды. Для того чтобы ЛА имел контакт с двумя воздушными потоками, необходимо, чтобы он имел соответствующие размеры, перекрывающие размеры тропопаузы. Достижение таких размеров одним ЛА - трудновыполнимое решение задачи и экономически нецелесообразное.
Два летательных аппарата располагают так, чтобы они находились в воздушных потоках, имеющих требуемую разницу в скорости относительно земли, над заданной точкой на разной высоте, и соединяют их кабель-тросом. При этом возможно сочетание любых типов ЛА в такой связке.
При практической реализации данной идеи требуется оптимальный выбор ЛА, соответствующих требуемому диапазону скоростей на заданных высотах и имеющих наилучшие удельные весовые и стоимостные показатели. Для совокупности имеющихся климатических условий связка двух ЛА может быть реализована в следующих описанных ниже вариантах.
Первый вариант предполагается как самый простой и логичный для условий летней велопаузы. При наличии двух ветровых потоков на разных высотах, имеющих противоположное направление относительно фиксированной точки на земной поверхности, располагают каждый из ЛА в этих потоках и соединяют их кабель-тросом 3, как показано на фиг.1. Уравновешивают силу сопротивления каждого ЛА, используя полезную подъемную силу для всех ЛА, максимально возможную при данных скоростях воздушных потоков. Для данных условий применяют следующую комбинацию из разных типов ЛА (фиг.3): верхний (основной) ЛА1 - привязной аэростат, суммарная подъемная сила которого соответствует суммарному весу собственной конструкции, весу кабель-троса и полезной нагрузки, и нижний или вспомогательный ЛА2 - параплан (парашют-крыло), несущий функцию паруса и управляющего элемента.
Возможно использование любого типа ЛА в данной системе, например планера или автожира с авторотирующим винтом. Однако необходимо отметить, что данные типы ЛА, в отличие от привязного аэростата, аэростатическая подъемная сила которого не зависит от воздушной скорости, имеют ограниченный по минимальной скорости ветра диапазон применения, т.е. их минимальная воздушная скорость не должна быть меньше скорости сваливания для данного конкретного типа ЛА. Предлагаемый вариант комбинации, изображенный на фиг.3, имеет минимальный требуемый диапазон разности скоростей ветровых потоков и, следовательно, расширенную область применения по географическим и климатическим параметрам.
Такая комбинация ЛА в связке (фиг.3) практически позволяет уравновесить систему не только в условиях велопаузы, но и при наличии разности в скоростях ветровых потоков по высотам, имеющих одно направление относительно земли. Только в данном случае мы можем рассматривать равновесие системы в пространстве, движущейся с определенной скоростью и имеющей возможность перемещаться в направлениях, перпендикулярных воздушным потокам. Такая система также имеет преимущества по сравнению с обычными свободными аэростатами, так как позволяет сохранять заданную высоту полета без дополнительных затрат энергии, топлива или балласта и имеет неограниченную продолжительность полета.
Второй вариант является последовательным усложнением первого и ориентирован на более распространенные атмосферные условия, когда ветровые потоки на разных высотах имеют одинаковое (преимущественно западное направление), но имеют значительную разность по скорости:
ΔV=Vп1-Vп2,
где Vп1 - скорость потока на высоте H1, Vп2 - скорость потока на высоте H2.
Например, для условий острова Диксон в январе месяце разность в скорости ветра ΔV по высотам 16 и 24 км составляет до 14 м/с.
В данной ситуации для фиксации системы относительно заданной точки на земной поверхности оба ЛА должны двигаться против направления ветровых потоков. Для реализации данной идеи используют кабель-трос 3 для осуществления энергообмена между связанными ЛА (фиг.4). Как следует из ветрового профиля, верхний ЛА1 будет находиться в потоке, имеющем большую скорость. На него установлен ветрогенератор 4 (аналог резервной энергосистеме для гражданских самолетов), который вырабатывает электроэнергию и передает ее на нижний ЛА2 через кабель-трос. При этом нижний ЛА2 становится основным и несущим полезную нагрузку 7, так как движется в потоке с меньшей скоростью, но с большей плотностью воздуха. Конструктивно оба ЛА соответствуют самолету с крылом большого удлинения и площади для полетов на больших высотах. Подъемная сила верхнего ЛА1 должна уравновешивать вес кабель-троса 3, ветрогенератора 4 и вес собственной конструкции.
На нижнем основном ЛА2 располагается силовая установка 5 с электроприводами, резервный источник энергии 6. В отличие от первого варианта в данном случае верхний ЛА1 не только вырабатывает полезную электроэнергию и передает ее на основной ЛА, но и создает дополнительное сопротивление, которое должно компенсироваться силовой установкой 5 основного нижнего ЛА2. Чтобы определить, при каких условиях энергетический баланс такого взаимодействия может быть положительным, необходимо сделать расчет всей системы на основе общих имеющихся технических и статистических данных для заданных ветровых условий предполагаемого района эксплуатации системы.
Описанные выше два возможных варианта создания связки ЛА, способной удерживать длительное время полезную нагрузку в заданной точке, не исключают и другие варианты реализации данной системы. Возможно более сложное пространственное движение двух соединенных тросом ЛА, способных совместно использовать энергию разности скоростей ветровых потоков, без энергообмена через кабель-трос.
Запуск и подъем на высоту такой системы может быть осуществлен в зависимости от того, какие ЛА входят в связку. Например, для реализации первого описанного выше варианта старт системы может быть осуществлен аналогично запуску высотного аэростата. ЛА2 - управляемая парашютная система - находится в собранном состоянии и закреплена на подвеске к аэростату в момент старта. Трос также закреплен на аэростате в смотанном автоматической лебедкой состоянии.
После выхода аэростатической системы на заданную для ЛА1 высоту лебедка начинает разматываться, опуская в нижние слои атмосферы контейнер с парашютной системой до требуемой для ЛА2 высоты. На этой высоте выполняется автоматическое раскрытие купола управляемой парашютной системы. После чего система управления всей связки с помощью органов управления уравновесит систему в атмосфере соответственно интенсивности ветровых потоков, как показано на фиг.3.
На парашютной системе должна быть система строп, позволяющих как уменьшать эффективную площадь купола в требуемом диапазоне, так и изменять направление создаваемой силы сопротивления. Аэростат также должен иметь горизонтальные и вертикальные рули, позволяющие ему корректировать свое положение в атмосфере.
Для второго варианта реализации изобретения используют ЛА самолетного типа, старт связки осуществляют с аэродрома, имеющего взлетно-посадочную полосу соответственно летно-техническим характеристикам ЛА связки. Старт выполняется аналогично схеме взлета для самолета - буксировщика и планера. Кабель-трос должен находиться на лебедке на ЛА1 или ЛА2. Перед стартом он разматывается на необходимую для взлета длину и закрепляется на другом ЛА.
На буксировщике ЛА2 при взлете и наборе высоты размещают дополнительный источник энергии, который позволяет связке взлететь и набрать необходимую высоту. После набора связкой высоты, необходимой для ЛА1, автоматическая лебедка разматывает кабель-трос, а ЛА2 снижается до заданной для него высоты. Затем запускают ветрогенератор, размещенный на ЛА1, уравновешивают и ориентируют связку в атмосфере соответственно полетному заданию и ветровым условиям (фиг.4).
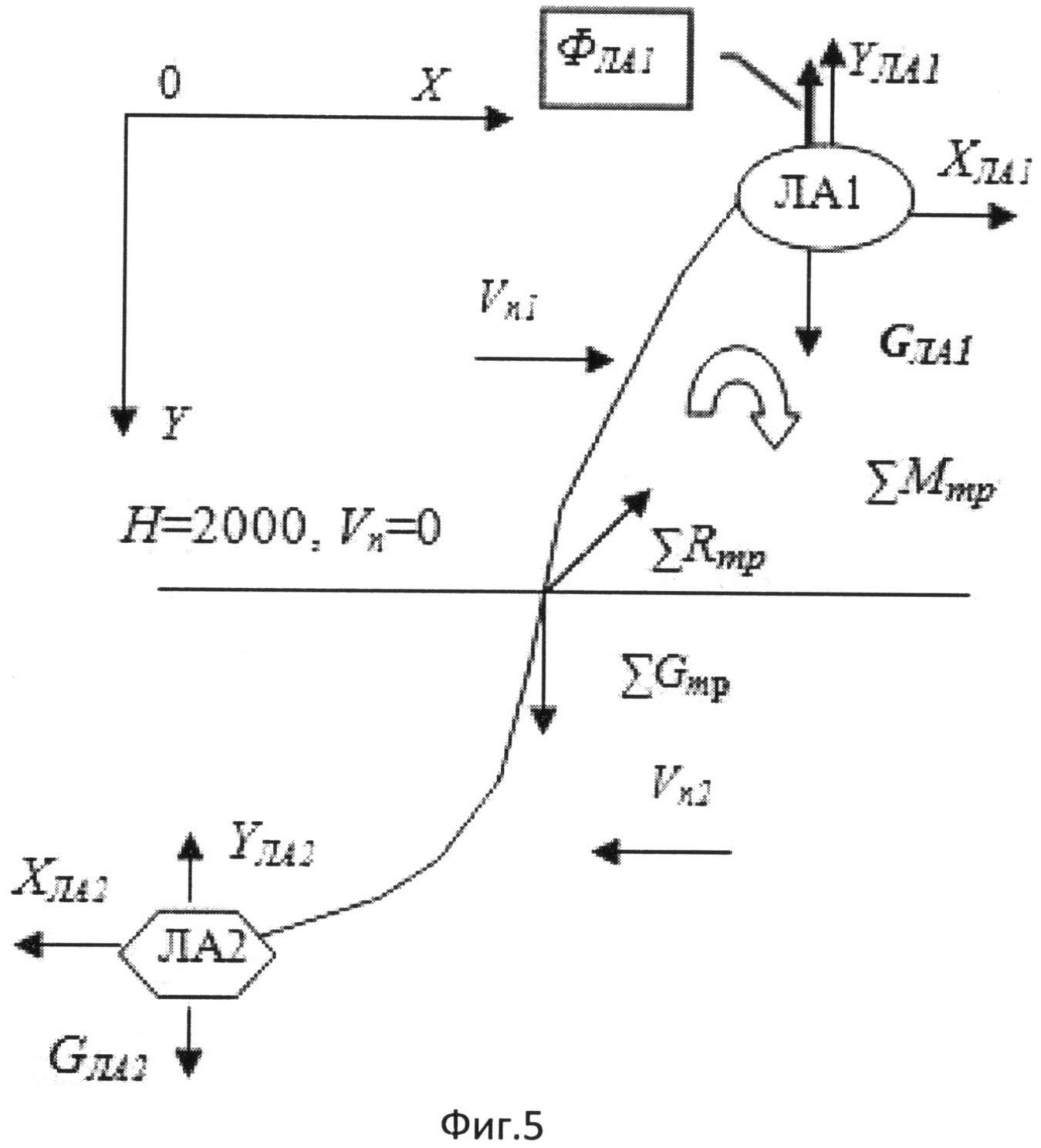
Выполним предварительный расчет первого варианта системы, когда два летательных аппарата, связанных тросом, уравновешиваются в пространстве только за счет аэродинамических сил (ЛА1 - привязной аэростат, ЛА2 - парашютная система). Связка находится в стационарном относительно Земли положении (фиг.5). Мы имеем два воздушных потока, движущихся в противоположных направлениях примерно с равными скоростями. Между ними - пограничная область минимальной скорости ветра относительно Земли. Условно примем точку нулевой относительной скорости на высоте H=20 км. Вверх и вниз от этой точки скорость ветра возрастает в противоположных направлениях. Максимальная разница высот ΔH для верхнего и нижнего летательных аппаратов составит 4 км или ±2 км от точки Vn=0, на H=20 км, а длина привязного троса Lmp~4,5÷6 км. Скорость ветра изменяется от Vn=0 до Vn=5÷25 м/с по параболическому закону в зависимости от высоты. Верхний ЛА1 несет массу троса ∑Gтр и массу полезной нагрузки Gпн. Нижний ЛА2 должен создавать эквивалентное натяжение троса, т.е. силу сопротивления ХЛА2, которая уравновесит силу сопротивления верхнего ЛА1 - ХЛА1. При необходимости ЛА1 может нести часть полезной нагрузки. Схема сил, действующих на связку, также показана на фиг.5.
Составим уравнения, описывающие систему в состоянии равновесия:

где ХЛА1, ХЛА2, RmpX и YЛА1, YЛА2, RmpY - проекции результирующих аэродинамических сил на оси OX, OY, GЛА1, GЛА2, Gmp- вес ЛА и суммарный вес троса, ∑Mmp- суммарный аэродинамический момент троса, ∑Mi - моменты других сил, действующих на систему относительно центра приложения ∑Rmp, суммарной аэродинамической силы, действующей на трос, ФЛА1 - аэростатическая подъемная сила, действующая в том случае, если ЛА1 является аэростатическим летательным аппаратом.
Решение такой системы уравнений требует определения геометрических параметров троса, его положения в пространстве и аэродинамической силы, действующей на трос при обтекании ветровым потоком, разной силы и направления. Поэтому в первом приближении эта задача решается путем разбиения троса на элементарные участки и нахождения решения для каждого участка в отдельности, начиная от верхней точки троса (ЛА1) до нижней точки (ЛА2). При решении данной задачи принимаем допущение, что все силы расположены в одной плоскости XOY. В реальности воздушные потоки могут иметь любые вектора скорости и привязной трос будет иметь смещение по оси OZ, но на данном этапе важно определить соотношение сил и область возможного существования такой системы.
Для расчетов были использованы известные данные по кабель-тросам из кевлара (разрывная длина 42 км), удельный вес конструкции аэростатического аппарата 40% от GЛА1.
Расчет положения троса в пространстве показал, что для данного диапазона скорости ветрового потока от 0 до 20 м/с отклонения ЛА1 и ЛА2 по горизонтали (ось X, фиг.5) составит около 250 м при разнице в высоте между ЛА1 и ЛА2 - 4 км. Аэродинамическое сопротивление троса при данном диапазоне скоростей ветровых потоков не оказывает значительное влияние на положение ЛА.
Весовой расчет системы показал, что для данных расчетных ветровых и высотных условий потребный объем аэростатической оболочки ЛА1 составит 50370 м3, суммарный взлетный вес связки ЛА (высотной платформы) - 2560 кг при заданном весе полезной нагрузки в 500 кг. По данным весовым и габаритным параметрам высотная платформа - связка ЛА имеет преимущество в 3-5 раз по сравнению с высотными дирижаблями на солнечной энергии. Такой показатель позволяет сделать вывод об экономической целесообразности реализации предлагаемой идеи высотной платформы.
Изобретение может быть использовано при создании высотной стратосферной платформы, предназначенной для подъема полезной нагрузки на высоту 15÷25 км (высоту велопаузы и тропопаузы) и способной находиться в заданной точке от нескольких месяцев до года и более. Возможно использование данного изобретения и на меньших высотах при наличии необходимой разности в скорости и направлении воздушных потоков.
Создание высотной платформы, имеющей продолжительность барражирования от одного месяца до года и более над заданной точкой поверхности земли, включая северные широты (до 75° с.ш.), при сохранении невысокой стоимости самой системы и стоимости ее жизненного цикла по сравнению со спутниковыми системами способно обеспечить значительное конкурентное преимущество.
Способы получения нанодисперсного углерода (варианты) и устройство для их реализации
Устройство бесконтактного возбуждения механических колебаний
Способ измерения температуры режущей кромки лезвийного инструмента при высокоскоростном фрезеровании металла
Термомолекулярный насос (варианты)
Способ коррекции результатов измерения тензометрическим мостовым датчиком с инструментальным усилителем
Прямоточный воздушно-реактивный двигатель с распределенным по длине тепломассоподводом
Магнитогазодинамический канал
Гофрированный газопровод с подавлением шума и вибрации (варианты)
Гидропресс для соединения частей камеры высокого давления
Устройство для испытания панелей
Конвертируемый летательный аппарат
Складываемый воздушный винт
Двухтопливный летательный аппарат
Конвертируемый летательный аппарат

