Результат интеллектуальной деятельности: САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ СТАТИЧЕСКОЙ ОШИБКИ В АВТОМАТИЧЕСКИХ СИСТЕМАХ СТАБИЛИЗАЦИИ ДИНАМИЧЕСКИХ ОБЪЕКТОВ
Вид РИД
Изобретение
Устройство относится к области средств автоматизации и может применяться в системах автоматического управления динамическими объектами различной природы (в химической промышленности, тепло- и электроэнергетике).
Качество работы системы автоматического управления в установившемся режиме работы оценивается по величине статической ошибки, равной разности между требуемым и действительным значениями регулируемой величины в установившемся режиме работы системы. В системах стабилизации с линейным объектом ошибка системы может быть найдена по известному выражению [см., например, кн. Теория автоматического управления. 4.1. Под ред А.В.Нетушила. М.: Высшая школа. - 1967. - С.198., Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1972. - С.203.]:
где x0(s) и F(s) - изображения требуемого значения регулируемой величины (уставки) и возмущающего воздействия соответственно, W(s) - передаточная функция разомкнутой системы, Fk(s) и Wk(s) - возмущение и соответствующая ему передаточная функция по возмущению. Применительно к выражению (1) передаточные функции разомкнутой системы и по возмущению дают возможность в символической или операторной форме записать дифференциальное уравнение, связывающее ошибку с входными воздействиями:
где  - алгебраический оператор дифференцирования.
- алгебраический оператор дифференцирования.
Статическая ошибка в соответствии с теоремой о предельном переходе в системах стабилизации при условии, что и возмущения fk(t)=dk0=const, будет иметь следующий вид:
Первое слагаемое этого выражения представляет собой составляющую ошибки, определяемую задающим воздействием. Эта составляющая ошибки может быть отличной от нуля в системах стабилизации динамических объектов без астатизма с пропорциональным регулятором. В этом случае W(p)=k представляет собой общий коэффициент усиления по разомкнутой цепи и первое слагаемое в выражении (3) может быть представлено в виде
Эта составляющая ошибки практически может быть уменьшена путем увеличения коэффициента k и сведена к нулю при астатическом регулировании, когда W(0)→∞. Вторая составляющая никогда не обращается в нуль, если возмущающее воздействие приложено до интегрирующего звена.
Существуют устройства, позволяющие устранить статическую ошибку без использования интегрирующих элементов. Достигается это путем использования неединичной обратной связи в замкнутых системах стабилизации (см. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1972. - С.261) либо путем масштабирования входного воздействия x0 или выходной величины x (там же, с.262).
Наиболее близким по своей сущности к заявляемому устройству является устройство, представленное в книге Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1972. - С.261, рис.9.16. Недостаток представленного устройства состоит в том, что он оказывается малопригоден для практического использования в условиях неопределенности объекта и среды, при действии параметрических и меняющихся сигнальных возмущений.
Техническим результатом изобретения является повышение точности управления в системах стабилизации с предлагаемым устройством в условиях действия как сигнальных, так и параметрических возмущающих воздействий на объект.
Для этого в заявляемое устройство введен сумматор, первый вход которого соединен с первым входом устройства и первым входом интегратора, выход которого связан со вторым входом сумматора, выход которого соединен с первым входом усилителя, второй вход которого связан со вторым входом устройства, выход которого подключен к выходу устройства.
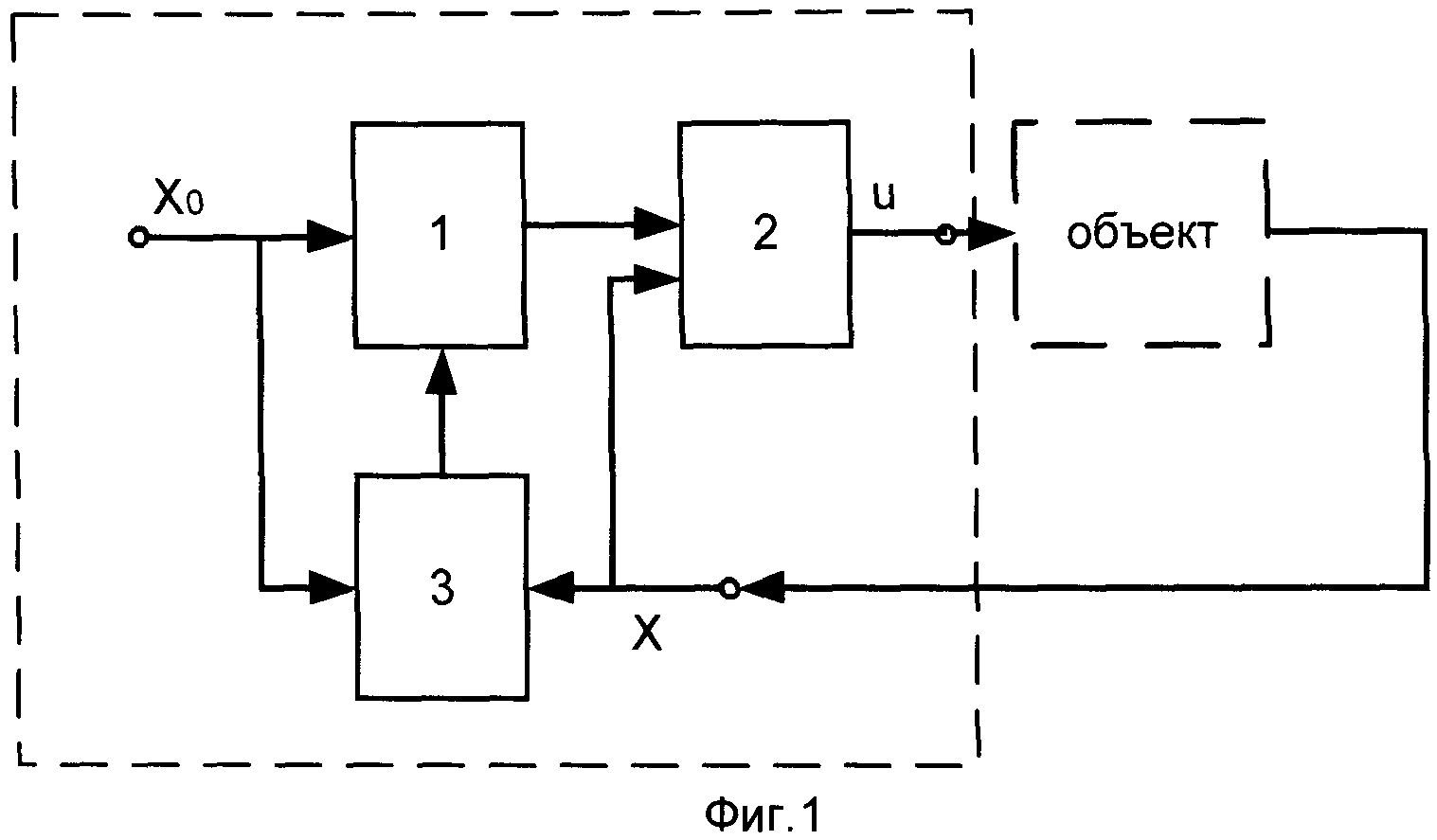
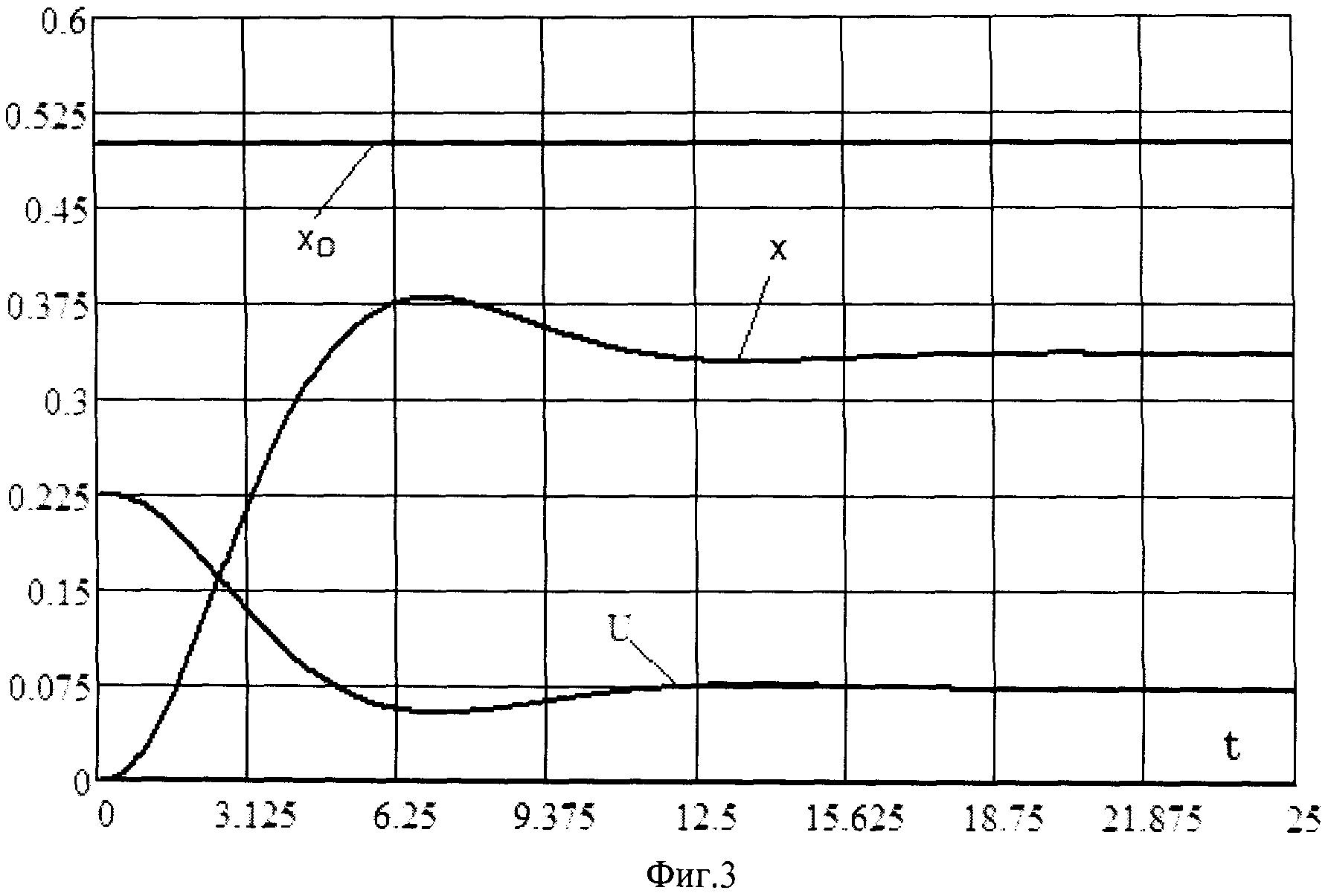
Устройство изображено на фиг.1, где представлена его блок-схема, фиг.2 иллюстрирует пример конкретного выполнения регулятора на пневматических элементах УСЭППА, на фиг.3 и 4 представлены результаты исследования процессов в системе с предложенным устройством методом цифрового моделирования.
Устройство содержит (фиг.1) сумматор 1, усилитель разности двух сигналов 2, интегратор 3, x0 - первый вход устройства (сигнал задания), x - второй вход устройства (переменная), U - выходной сигнал устройства.
Первый вход устройства x0 подключен к первому входу сумматора 1 и первому входу интегратора 3. Второй вход устройства (переменная - x) соединен со вторыми входами усилителя 2 и интегратора 3. Выход интегратора 3 соединен со вторым входом сумматора 1, выход которого связан с первым входом усилителя 2, выход которого подключен к выходу устройства U.
Подобное соединение элементов позволяет реализовать в устройстве следующий закон управления:

где 
k1, k2 и k3 - постоянные коэффициенты.
Рассмотрим работу устройства в целом и его отдельных элементов.
Сумматор - это или дроссельный (пневматический), или резисторный сумматор, или программный продукт. Усилитель и интегратор - также стандартные элементы. Пример их конкретного исполнения представлен на фиг.2.
Интегратор 3 (фиг.2) содержит повторитель 8, усилитель 9, дроссель 7 и пневмоемкость 6. Входами его являются сигналы х0 и х. Это типовое устройство, построенное на усилителе 9, охваченном инерционной положительной обратной связью, и формирующее на своем выходе линейно нарастающий сигнал, пропорциональный разности двух сигналов, действующих на его входах.
Усилитель 2 помимо элемента 4 содержит дроссельный сумматор 5, работающий по принципу делителя, входом которого является сигнал с выхода усилителя 2, а выход, соединенный с камерой элемента 4, реализует неединичную обратную связь. На входы усилителя 4 также поступают два сигнала: на прямой вход - с сумматора 1, а на второй - с первого входа устройства x. Это стандартный элемент.
Сумматор 1 построен по схеме дроссельного сумматора и реализует операцию по формуле k1·x0+(1-k1)·xи, где коэффициент k1 меньше единицы, его значение определяется настройкой переменного дросселя в сумматоре, а xи - выходной сигнал интегратора, подключенный ко второму входу сумматора.
Работу устройства рассмотрим по фиг.2 и 3 в предположении, что его выходной сигнал U подключен к входу объекта управления, а выходной сигнал объекта подключен ко второму входу устройства. Тогда в момент включения устройства в его выходной линии U формируется сигнал управления с выхода усилителя 2, вызванный задающим сигналом (уставкой) x0. Этот сигнал проходит через сумматор 1 на прямой вход усилителя 2. Под воздействием выходного сигнала усилителя 2 на втором входе устройства x появляется сигнал с выхода объекта, который сравнивается в интеграторе 3 с заданным x0. Одновременно сигнал x поступает на инверсный вход усилителя 3, где сравнивается с сигналом, который формируется в сумматоре 2. Сигнал на выходе сумматора 2 складывается из суммы двух сигналов: масштабированного входного сигнала х0 и выходного сигнала интегратора 3. Выходной сигнал интегратора 3 изменяется до тех пор, пока разность между сигналом x и заданным его значением x0 не станет равной нулю, что и является свидетельством отсутствия статической ошибки в системе. Сигнал х0 при этом сдвигается в ту или иную сторону на величину статической ошибки. Статическая ошибка в системе всегда будет равна нулю, независимо от того, вызвана ли она сигнальными или параметрическими возмущающими воздействиями на объект.
Следует также обратить внимание на то, что в прямой цепи управления объектом нет интегрирующих звеньев (только усилитель, выполняющий роль пропорционального регулятора). Как известно из теории автоматического управления, наличие в прямой цепи управления интегрирующего звена снижает при прочих равных условиях запас устойчивости системы управления объектом, делает ее менее надежной и ухудшает показатели качества управления в условиях неопределенности параметров объекта и среды.
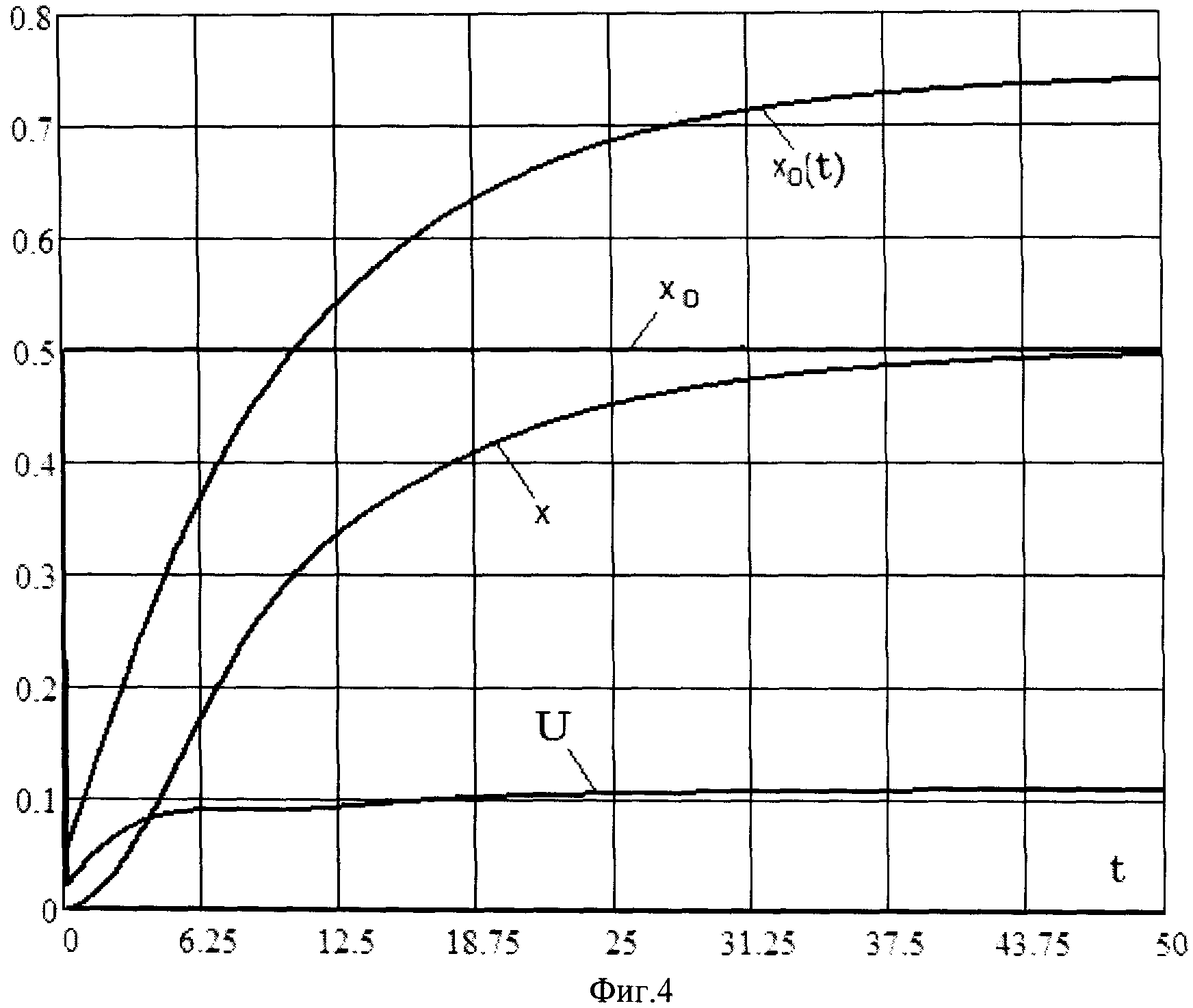
На фиг.3 и фиг.4 приведены процессы в системе с заявляемым устройством, полученные методом цифрового моделирования. В качестве объекта исследовалась модель с передаточной функцией W(s)=1-5/(4.76·s+1)(1.98·s+1)(0.32·s+1).
На фиг.3 приведены процессы изменения выходной координаты в условиях, когда интегратор 3 был отключен. В результате статическая ошибка в системе имеется. На фиг.4 представлены те же процессы (при прочих равных условиях) с подключенным интегратором 3. Статическая ошибка в системе отсутствует. Здесь x0(t)=k1·x0+(1-k1)·a(t). Результаты исследований в условиях воздействия постоянно действующих параметрических и сигнальных возмущений на объект при необходимости могут быть представлены дополнительно. Но они мало чем отличаются от результатов, представленных на фиг.4.
Таким образом, данное устройство решает задачу обеспечения равенства регулируемой координаты в установившемся режиме работы системы его заданному значению путем автоматического масштабирования сигнала x0 (в сторону увеличения или уменьшения) на заранее неизвестную величину, которая определяется параметрами объекта и среды, которые могут быть известны не точно.
Самонастраивающееся устройство для устранения статической ошибки в автоматических системах стабилизации динамических объектов, содержащее интегратор, первый и второй входы которого соединены с первым и вторым входами устройства, и усилитель разности двух сигналов, инверсный вход которого подключен ко второму входу устройства и второму входу интегратора, а выход - к выходу устройства, отличающееся тем, что в него дополнительно включен сумматор, первый вход которого соединен с первым входом устройства, второй вход - с выходом интегратора, а выход - с прямым входом усилителя.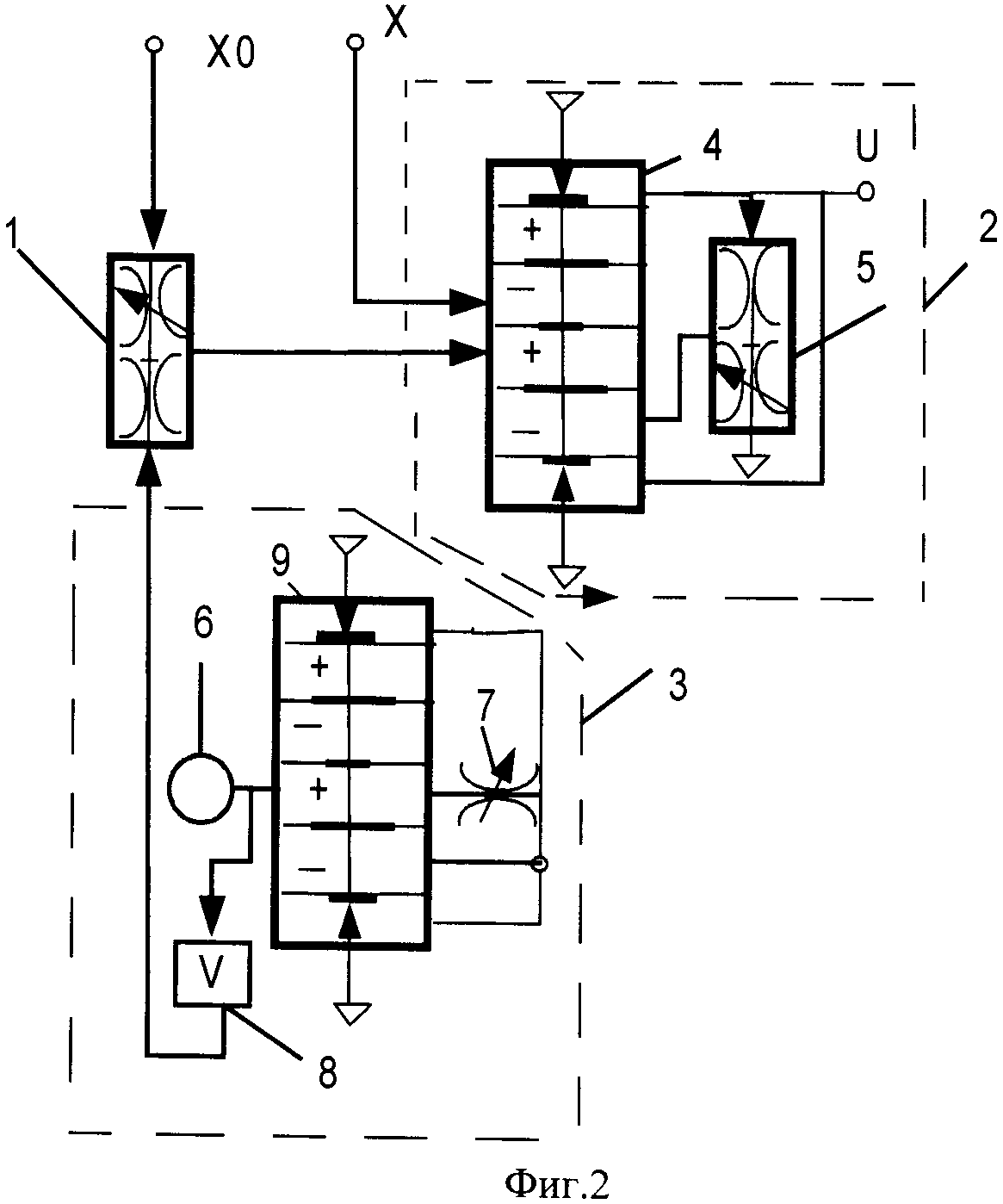
Адаптивный релейный регулятор
Релейный регулятор с переменной структурой
Способ балансировки элементов роторных систем и устройство для его осуществления
Способ приготовления катализаторов и катализатор для глубокой гидроочистки нефтяных фракций
Способ работы и устройство для вентиляции автодорожных тоннелей
Способ изготовления электроизолированного соединения
Электролит для химического источника тока
Расплавляемый электролит для химического источника тока
Состав и способ синтеза катализатора гидродеоксигенации кислородсодержащего углеводородного сырья
Способ диагностирования электрических цепей, содержащих активное сопротивление и индуктивность
Катализатор гидроочистки масляных фракций и рафинатов селективной очистки и способ его приготовления
Катализатор глубокой гидроочистки нефтяных фракций и способ его приготовления

