Результат интеллектуальной деятельности: СПОСОБ ЗАЩИТЫ ПОЛЬЗОВАТЕЛЯ РАДИОНАВИГАЦИОННОГО ПРИЕМНИКА ПО ОТНОШЕНИЮ К АБЕРРАНТНЫМ ИЗМЕРЕНИЯМ ПСЕВДОРАССТОЯНИЙ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к способу защиты пользователя радионавигационного приемника от аберрантных измерений псевдорасстояний.
Предшествующий уровень техники
Погрешность в географическом положении, показываемом приемником спутниковой радионавигационной системы, зависит от погрешностей в измерениях псевдорасстояний, определяемых при помощи алгоритма, используемого этим приемником, и от погрешностей, содержащихся в навигационном сообщении, передаваемом спутником.
Чтобы ограничить эти погрешности и обеспечить защиту пользователей, необходимо располагать средствами, позволяющими идентифицировать такие погрешности с целью их устранения и вычислять предельную погрешность положения в зависимости от имеющихся в наличии измерений с учетом требований целостности и непрерывности, связанных с контекстом использования (посадка летательного аппарата и т.д.). Эти средства лежат в основе устройства, содержащего функцию RAIM (Receiver Autonomous Integrity Monitoring - мониторинг целостности автономного приемника). Современные приемники GNSS (глобальная система спутниковой навигации), используемые в гражданской авиации, невозможно использовать без функции RAIM.
Современное оборудование с функцией RAIM характеризуется двумя проблемами:
- оно является полностью интегрированным, из чего следует, что невозможно выбрать отдельно прибор, который принимает навигационный сигнал, и прибор, который вычисляет положение прибора, обеспечивающего функции контроля целостности,
- оно основано на алгоритмах типа алгоритма наименьших квадратов, которые оказываются нарушенными при наличии ошибочных измерений, причем при любой амплитуде (даже бесконечно малой) погрешности, которая искажает эти измерения, что создает проблемы надежности предложенных решений определения положения.
Краткое описание существа изобретения
Задачей настоящего изобретения является создание способа защиты пользователя радионавигационного приемника от аберрантных измерений псевдорасстояний, причем этот способ можно применять на приборе, независимом от прибора, который принимает навигационный сигнал и который вычисляет положение прибора, обеспечивающего функции контроля целостности, и устойчивая работа которого не нарушается наличием ошибочных измерений при любой амплитуде погрешностей, искажающих эти измерения.
Способ защиты в соответствии с настоящим изобретением в самом общем случае отличается тем, что взвешивают N остатков от оценки вектора состояния во время оценки навигационного решения, при этом взвешивание осуществляют по оцениваемой статистике погрешностей этих измерений, используя робастные статистические оценки (такие как Least Trimmed Squares Estimator (оценка по методу наименьших квадратов), или Minimum Covariance Determinant Estimator (по минимальному ковариантному детерминанту), или M-оценка, или A-, D-, GM-, L-, MM-P, R-, S- или W-оценка, или MSTD, причем это взвешивание может быть полным или частичным. Если оно является полным, учет остатков является полным с весовым коэффициентом, равным 1 или равным 0 для исключения, и если оно является частичным, весовой коэффициент находится между 0 и 1. Случай полного взвешивания охватывает, кроме всего прочего, робастные методы “RAIM-MSTD” и “RAIM-LTS”, а случай частичного взвешивания охватывает робастные методы типа “RAIM-M-оценок”. Робастные статистические оценки сами по себе хорошо известны и описаны, например, в статье «Википедия», которую можно найти по следующему адресу: , а также в ссылках, указанных в конце этой статьи.
Согласно другому отличительному признаку изобретения, выбирают подгруппу из h остатков оценки вектора состояния с наименьшей дисперсией, применяют эту дисперсию, умноженную на коэффициент адаптации, а также среднее значение этой же подгруппы, чтобы усреднить и затем нормализовать N входов, которые после возведения в квадрат сравнивают со статистическим порогом и отбрасывают, если они превышают этот порог, при h=N-1 и/или N-2, при этом N является числом остатков. Сравнение со статистическим порогом предназначено для того, чтобы систематически отделять h остатков от оценки вектора состояния. Это и есть метод “RAIM-MSTD”.
Согласно еще одному отличительному признаку изобретения, выбирают подгруппу из N-h остатков оценки вектора состояния, при которой сумма этих измерений в квадрате является минимальной, оценивают среднее значение и дисперсию этой подгруппы и используют это среднее значение и эту дисперсию (предпочтительно последнюю умножают на коэффициент адаптации, превышающий 1), чтобы усреднить и затем нормализовать N входов, которые после возведения в квадрат сравнивают со статистическим порогом и отбрасывают, если они превышают этот порог. Это является методом “RAIM-LTS”.
Согласно еще одному отличительному признаку изобретения, N остатков оценки вектора состояния взвешивают при помощи итеративного метода, который при каждой итерации состоит в оценке среднего значения и дисперсии остатков оценки вектора состояния, в вычислении весового коэффициента при помощи функции взвешивания, входными данными которой являются усредненные и нормализованные по дисперсии остатки, и остатки умножают на эти весовые коэффициенты, при этом итеративный процесс прекращается, если сумма квадратов разностей между двумя последовательными остатками меньше порогового значения, при этом среднее значение и дисперсию (последнюю умножают на коэффициент адаптации), полученные в результате этого процесса, используют, чтобы усреднить и затем нормализовать N входов, которые после возведения в квадрат сравнивают со статистическим порогом и отбрасывают, если они превышают этот порог. Это является методом “RAIM-М-оценок”.
Более конкретно, способ защиты в соответствии с настоящим изобретением характеризуется тем, что содержит следующие этапы вычисления информации целостности путем вычисления остатков измерений псевдорасстояний, полученных на основании географического положения и временного сдвига, выдаваемых первичным радионавигационным приемником, и на основании измерений, используемых первичным приемником для получений этих значений, на которых:
- формируют все подгруппы остатков с кардиналом h=N-1 и/или N-2, где N является числом остатков,
- вычисляют типовое отклонение для каждой подгруппы и определяют при наименьшем типовом отклонении σmin, используемом для взвешивания остатков, hmin значение кардинала, при котором получают σmin, Ymin вектор соответствующего кардинала hmin, и mmin среднее значение Ymin,
- вычисляют первый вектор, определяемый как: 
- векторы rvec,1 сортируют в порядке возрастания, чтобы получить: 
- вычисляют коэффициент f, определяемый как: , где (χ2)(.,1) является обратной величиной распределения χ2 при одной степени свободы,
, где (χ2)(.,1) является обратной величиной распределения χ2 при одной степени свободы,
- после этого осуществляют повторное взвешивание σmin следующим образом:
σmin,2=
- вычисляют новый вектор остатков: 
- определяют порог Т:  , где Р является вероятностью, оптимальное значение которой необходимо определить вероятностным моделированием,
, где Р является вероятностью, оптимальное значение которой необходимо определить вероятностным моделированием,
- каждый элемент вектора rvec,2 сравнивают с Т, и если  , детектируют неисправность, и спутник i исключают.
, детектируют неисправность, и спутник i исключают.
Краткое описание чертежей
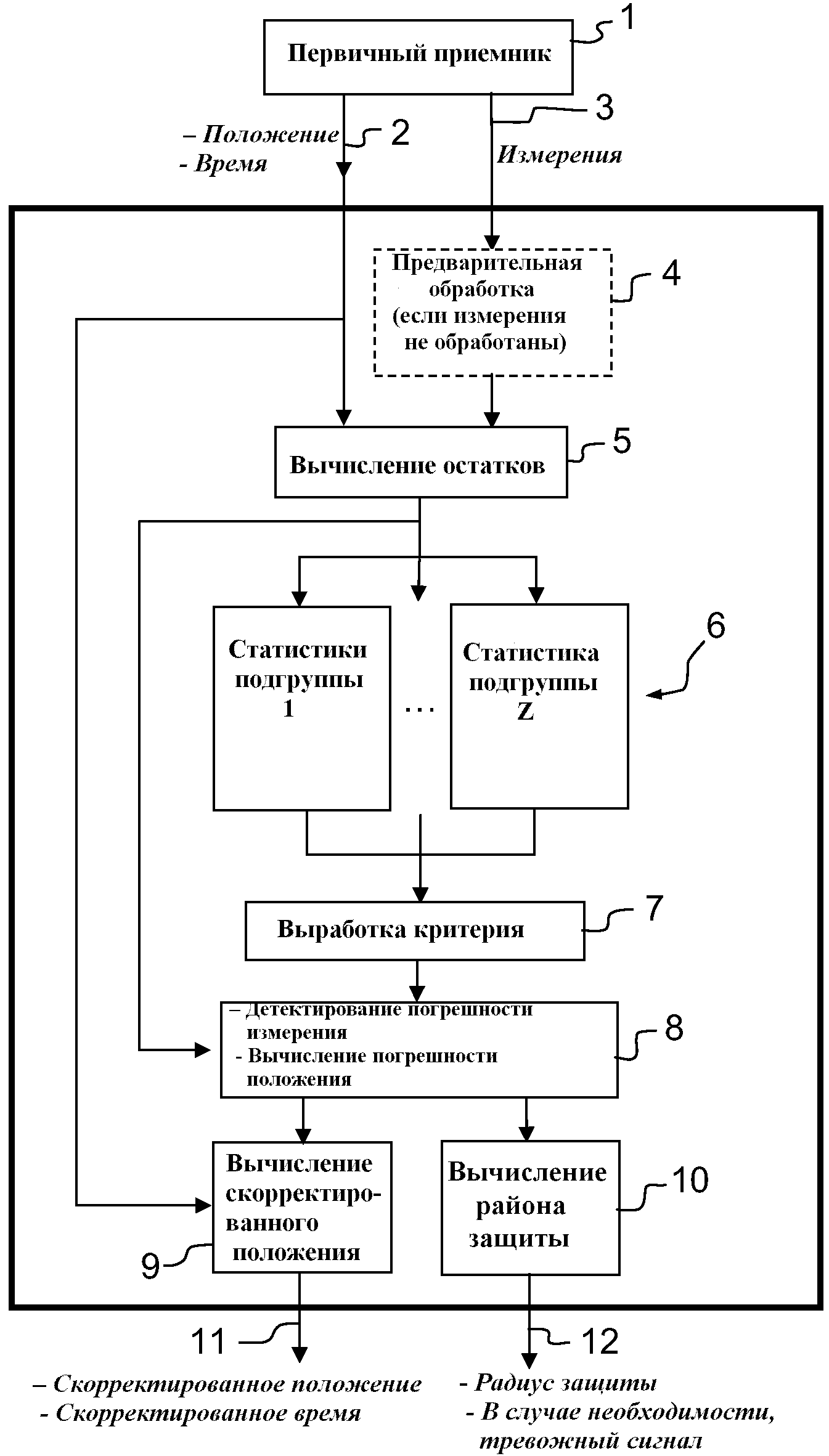
Настоящее изобретение будет более очевидно из нижеследующего подробного описания варианта выполнения, представленного в качестве не ограничительного примера со ссылками на прилагаемый чертеж, на котором показана упрощенная схема последовательных этапов осуществления способа в соответствии с настоящим изобретением.
Подробное описание предпочтительных вариантов воплощения настоящего изобретения
На схеме по фиг. позицией 1 символически обозначен классический первичный приемник спутниковой радионавигационной системы, выдающий, с одной стороны, через один канал 2 решение, оцениваемое первичным приемником (географическое положение и временной сдвиг), и через другой канал 3 измерения псевдорасстояний, используемые первичным приемником для получения решения.
Если измерения, передаваемые первичным приемником, предварительно не были обработаны, следует произвести их предварительную обработку, которая сама по себе известна, чтобы устранить в них погрешности распространения и измерений, что символично показано пунктирным прямоугольником 4.
Вычисление информации целостности далее содержит следующие этапы, начиная с вычисления остатков (5) измерений псевдорасстояний (обозначаемых Yi, где i является индексом спутника, а N является числом этих остатков), на которых:
1. Формируют все подгруппы остатков с кардиналом h=N-1 и/или N-2,
2. Вычисляют типовое отклонение каждой подгруппы (6). Наименьшее типовое отклонение обозначают σmin. Его используют в качестве опорной величины (7). После этого определяют:
а. hmin значение кардинала, при котором получают σmin,
b. Ymin вектор соответствующего кардинала hmin,
с. mmin среднее значение Ymin.
3. σmin используют для взвешивания остатков. Вычисляют первый вектор: 
4. Для разных спутников первые векторы rvec,1 сортируют в порядке возрастания, чтобы получить:  . Кроме того, вычисляют коэффициент f, определяемый как:
. Кроме того, вычисляют коэффициент f, определяемый как: , где (χ2)(.,1) является обратной величиной распределения χ2 при одной степени свободы.
, где (χ2)(.,1) является обратной величиной распределения χ2 при одной степени свободы.
5. После этого осуществляют повторное взвешивание σmin следующим образом: σmin,2=
6. Вычисляют новый вектор остатков: 
7. Определяют порог Т:  , где Р является вероятностью, оптимальное значение которой необходимо определить методом вероятностного моделирования типа «Монте-Карло».
, где Р является вероятностью, оптимальное значение которой необходимо определить методом вероятностного моделирования типа «Монте-Карло».
8. Каждый элемент вектора rvec,2 сравнивают с Т. Если  , отмечают детектирование неисправности, и спутник i исключают (8).
, отмечают детектирование неисправности, и спутник i исключают (8).
9. После осуществления детектирования возможных ошибочных измерений, можно произвести вычисление районов защиты (10) обычным путем с учетом числа произведенных измерений.
Следует отметить, что Р, представляющее собой вероятность исключения неошибочного спутника, вместе с тем нельзя напрямую соотнести с вероятностью исключения, определенной нормами ИКАО. С другой стороны, действие по пункту 8 осуществляют отдельно для каждого спутника: поэтому нет детектирования без исключения.
Таким образом, выходы этого устройства обеспечивают:
- решение положения, в случае необходимости, скорректированное (11), если детектирована погрешность во входных данных измерений,
- значение района защиты (12), которое позволяет обеспечить решение положения устройства, включая, в случае необходимости, тревожный сигнал.
Способ в соответствии с настоящим изобретением позволяет, автономно от любого наземного сегмента (то есть с использованием функции RAIM):
- повысить эффективность приемника (называемого «первичным»), выпускаемого на рынок без функции контроля целостности,
- детектировать возможные погрешности, искажающие измерения на входе вычисления положения, за счет использования робастного статистического алгоритма оценки, то есть реально не подверженного влиянию погрешностей измерений, и с применением динамического критерия,
- вычислять робастную коррекцию для положения, выдаваемого первичным приемником, с исключением такой погрешности при ее детектировании,
- вычислять предельные погрешности положения в зависимости от имеющихся в наличии измерений и с учетом требований целостности и непрерывности, соответствующих контексту использования (например, в фазе посадки летательного аппарата). Этими предельными погрешностями являются пороговые значения, которые не должны быть превышены более одного раза для N измерений расстояний, например, при N=от 105 до 107,
- эффективность превышает эффективность стандартного алгоритма RAIM (использующего метод наименьших квадратов).
Поскольку в настоящее время не существует способа, позволяющего добавить функцию контроля целостности в приемник, если она изначально в него не заложена, известные устройства не могут использовать текущие алгоритмы, чтобы получить эквивалентную характеристику целостность/доступность. Для улучшения характеристик можно применять последовательную или фильтрующую обработку, но, поскольку возможность такой обработки исключена при оценке точки местонахождения (слишком длительное время выдачи тревожного сигнала контроля целостности, которое составляет, например, порядка 6 секунд в гражданской авиации, но может составлять и несколько сот секунд при эффективном фильтровании), то для обеспечения контроля целостности на таком уровне эффективности другого полностью автономного решения не существует.
- Способ в соответствии с настоящим изобретением позволяет оптимизировать выбор прибора, принимающего навигационный сигнал, независимо от прибора обработки RAIM.
- Способ RAIM, который благодаря изобретению становится робастным, позволяет повысить надежность оценки точки местонахождения (географического положения) за счет повышения характеристик контроля целостности (детектирование и исключение) по сравнению со стандартным способом RAIM.
- Этот способ обеспечивает возможность детектирования и исключения ошибочных измерений GNSS, более оптимизировано, по сравнению, со стандартным RAIM. В частности, он позволяет повысить степень доступности системы GNSS, совместимой с требованиями в гражданской авиации.
В заключение можно отметить, что изобретение предоставляет намного больше возможностей по сравнению со стандартными алгоритмами как с точки зрения контроля целостности (детектирование), так и с точки зрения готовности (ложные тревоги, оптимизация районов защиты), и может применяться для радионавигационного приемника, изначально не имеющего робастной функции RAIM защиты от погрешностей измерения.

Способ выявления характеристик функционирования бортового оборудования спутника на орбите и соответствующая система орбитальных испытаний (iot)
Оптико-электронное устройство наблюдения для наземного транспортного средства
Способ получения изображений объекта съемки с датчика, находящегося на борту движущегося носителя, с автоматическим регулированием его линии визирования
Электрическая компоновка летательного аппарата, летательный аппарат, содержащий эту компоновку, и способ функционирования этой компоновки
Дальнометрия малоразмерных целей с большой дальностью действия
Устройство развертывания и свертывания гибкой конструкции, гибкая развертываемая конструкция и спутник, оборудованные таким устройством
Система и способ для определения ошибки местоположения приемного устройства спутниковой локализации

