Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ
Вид РИД
Изобретение
Изобретение относится к области машиностроения и может быть использовано в оборонной технике для управления движением гусеничного шасси.
Известна отечественная боевая гусеничная машина пехоты БМП-1 (Г.Л. Холявский. Энциклопедия бронетехники. Гусеничные боевые машины. Харвест, 2001 г., стр.495-499) с гидромеханической трансмиссией, расположенной в передней части шасси. Управление по изменению направления движения самой машины содержит Т-образный штурвальный руль, расположенный на рулевом валу (колонке) так, что рукоятки этого руля перпендикулярны оси вала колонки. Длина каждой рукоятки максимально соразмерна ширине ладони в перчатке, причем корпус колонки закреплен жестко к корпусу шасси. Впереди перед штурвальным рулем расположены: справа - рычаг переключения передач, с левой стороны - рычаг выполнения замедленной передачи. Кинематическая связь от штурвального руля, рычагов переключений до коробки скоростей выполнена с помощью элементов гидравлической системы с рабочей жидкостью внутри трубопроводов этой системы. Для выполнения замедленной передачи или переключения скоростей механик-водитель, удерживая одной рукой рукоятку штурвального руля, другой производит регламентированную работу с одним из этих рычагов. По окончании работы рука возвращается в исходное положение на штурвальный руль. Для изменения направления движения гусеничного шасси механик-водитель должен повернуть рукоятку Т-образного штурвального руля относительно продольной оси рулевого вала вперед (от себя). При этом противоположный гусеничный двигатель за счет работы гидравлики в кинематической связи начинает работать замедленно, в результате чего происходит поворот в намеченную сторону. Вторая рука поворачивает соответствующую рукоятку штурвального руля назад (к себе), обеспечивая поворот вала в колонке.
Недостатками данной конструкции являются:
- конструкция Т-образного штурвального руля при выполнении поворота рулевого вала перегружает кистевую часть рук механика-водителя от частого прикладывания знакопеременной мускульной нагрузки (особенно при преодолении сильнопересеченной местности или бездорожья);
- при выполнении работ по переключению скоростей механику-водителю приходится удерживать рукоятку руля одной рукой;
- рабочая жидкость в гидравлической системе, образующей кинематическую связь управления движением, является горючей, что создает повышенную пожароопасность для экипажа в закрытом забронированном объеме машины;
- мала регулировка рулевого управления, что сокращает оптимальность размещения механика-водителя в зоне посадки и снижает комфортность управления транспортным средством.
Известен танк M1 «Абрамс» (Г.Л. Холявский. Полная энциклопедия танков мира 1915-2000 гг., Харвест, стр.444-450) с автоматической гидромеханической трансмиссией, выполненной в одном блоке с газотурбинным двигателем AGT-1500, расположенном в кормовой части гусеничного шасси. Для управления движением танка имеется Т-образная рулевая колонка мотоциклетного типа, связанная с автоматической трансмиссией. В верхней части колонки расположен рычажок переключения передач, устанавливаемый в положения - нейтраль, - задний ход - и - передний ход. Регулировка подачи топлива осуществляется вращением наконечников рукояток рулевой колонки. При закрытом люке механик-водитель занимает положение полулежа. Отделение управления движением расположено в средней передней части танка. Автоматическая гидромеханическая трансмиссия обеспечивает четыре передачи переднего хода и два - заднего, и состоит из гидротрансформатора с автоматической блокировкой, планетарной коробки передач и бесступенчатого гидростатического механизма поворота.
Недостатками данной конструкции являются:
- наличие на рулевой колонке вращаемых от руки наконечников усложняет ручное управление при выполнении операции по изменению направления движения и расхода топлива;
- при выполнении работ по изменению вида движения (передний ход или задний ход) механик-водитель снимает одну руку с рукояток колонки и, как следствие, увеличивается зрительное внимание, особенно при движении по пересеченной местности или бездорожью, когда учащаются процессы изменения направления движения с помощью рулевого управления;
- рабочая жидкость в гидравлической системе автоматической гидромеханической трансмиссии является горючей, что создает повышенную пожароопасность для экипажа в закрытом забронированном объеме машины.
Наиболее близким к заявляемому изобретению по совокупности существенных признаков является самоходная артиллерийская установка с гусеничным движителем 2С19 «Мста-С» (Г.Л. Холявский. Энциклопедия бронетехники. Гусеничные боевые машины 1919-2000 г., Харвест, 2001 г., стр.199-204) с механической трансмиссией и гидравлическими механизмами усиления при переключении скоростей, установленными на обоих коробках передач, расположены в герметизированном моторно-трансмиссионном отделении в кормовой части шасси. В отделении управления движением на поперечные валики рулевых приводов установлены поворотные рулевые рычаги - правый и левый для изменения направления движения, которые кинематически связаны с соответствующей коробкой скоростей и механизмом переключения механически с помощью жестких рычагов и тяг. При этом, в механизм переключения встроен бустер для снижения затрат мускульной энергии механика-водителя во время работы этими рычагами. При исходном положении оба поворотных рулевых рычага установлены в крайнее переднее от механика-водителя положение. При выполнении прямолинейного движения гусеничного шасси руки механика-водителя удерживают рычаги, сжимая ручные наконечники. Для изменения направления движения механик-водитель с помощью поворота назад соответствующего рычага понижают скорость соответствующего гусеничного движителя на одну передачу, и гусеничное шасси выполняет поворот в сторону понижаемой передачи движителя. При повороте одновременно назад обоими рулевыми рычагами в крайнее заднее положение, движение обоих движителей затормаживается. После затормаживания всего шасси механик-водитель отпускает оба рычага для возвращения их в исходное положение. При этом, в продольные тяги встроены кулаки, закрепленные на бортах шасси, которые служат для создания равномерного возрастания усилия на ручных наконечниках рулевых рычагов управления и возвращения элементов привода управления в исходное положение. Механику-водителю необходимо дополнительно вручную довести эти рычаги в исходное положение.
Недостатками данной конструкции ручного управления военной гусеничной машины являются:
- при отпускании рычагов управления из крайнего заднего положения большая часть секторного поворота происходит за счет подпружиненности кулаков в тяговых рулевых приводах, но при подходе к исходному положению механику- водителю по правилам эксплуатации рычажного управления требуются дополнительные затраты мускульной энергии для доводки их до упора;
- для переключения скоростей при движении с помощью механического избирателя механику-водителю необходимо снять руку с рукоятки наконечника правого рычага, удерживая левый рычаг, и поворот вправо невозможен;
- рулевое управление с помощью двух рулевых рычагов по изменению направления движения гусеничного шасси не однотипно с управлением автомобиля рулевым колесом, что требует двойных финансовых затрат на обучение военных кадров - водителей для эксплуатации колесного транспорта с рулевым управлением и механиков-водителей гусеничных шасси с рулевыми рычагами.
Задачей данного изобретения является создание системы управления движением военной гусеничной машины (ВГМ) на основе рулевого управления транспортного средства.
Техническое решение поставленной задачи достигается тем, что система управления движением, содержащая гусеничные движители, бортовые редукторы, коробки передач, механизмы переключения скоростей, включая бустеры к ним, два рулевых привода - правый и левый, кинематическая цепь которых состоит из тяг, рычагов, подпружиненных подвижных кулаков (копиров), поперечных поворотных валиков, с закрепленными на них сторонних правого и левого рулевого рычага с наконечниками для приложения на них мускульной энергии механика-водителя для изменения направления движения ВГМ, а также расположенный рядом с правым поперечным поворотным валиком ручной избиратель переключения скоростей, который кинематически связан с механизмами переключения коробок передач, при этом, на правый и левый поперечные поворотные валики установлен дополнительный рулевой привод, в котором две кинематические цепи сторонних приводов сведены в одну линию, включающую силовой двигатель, передающий механическую энергию на кинематические цепи так, что эта энергия может избирательно передаваться либо одновременно на обе цепи, либо односторонне с помощью элементов механизма включения/выключения, при этом, управление работой этого двигателя и механизмом включения/выключения осуществляется рулевым колесом, закрепленном на поворотном валу с последующей установкой на штурвальную колонку, расположенную в отделении управления движением перед механиком-водителем.
Дополнительный рулевой привод установлен так, что в местах его состыковки с поперечными поворотными валиками, сочленение выполнено с образованием поступательной пары за счет, например, звена с кулисой, закрепленного на конце каждого поперечного поворотного валика, а его длина и длина хорды при базовом угле поворота валика соответственно равны, например, 4 и от 2 до 3 его диаметров.
Силовой двигатель дополнительного рулевого привода выполнен, например, составным, а именно, электрического двигателя с редукторным блоком, в котором длина выхода штанги для передачи механической энергии по кинематическим цепям привода избирательна, за счет установки на колесе реечной передачи элементов механизма конечных выключателей.
В дополнительном рулевом приводе обе кинематические цепи сторонних приводов выполнены, как две замкнутые цепные передачи, а линия схождения этих потоков конструктивно выполнена, как рычажный механизм, в котором для избирательности включения этих кинематических цепей с помощью элементов механизма включения/выключения установлены две зубчатые муфты, управляемые на выключение за счет элементов кулачкового механизма от рулевого колеса и гибкими связующими звеньями в виде тросиков в оболочке, при повороте рулевого колеса для изменения направления движения ВГМ.
Две кинематические цепи дополнительного рулевого привода закрыты съемными крышками и расположены с обеих сторон от механика-водителя.
У правого поперечного поворотного валика установлен, как вариант исполнения, автомат переключения скоростей, кинематически связанный с механизмами переключения скоростей коробок передач.
Рулевое колесо и штурвальная колонка выполнены с элементами регулировки на комфортность размещения в зоне посадки механика-водителя.
Сущность изобретения поясняется чертежами, где изображены:
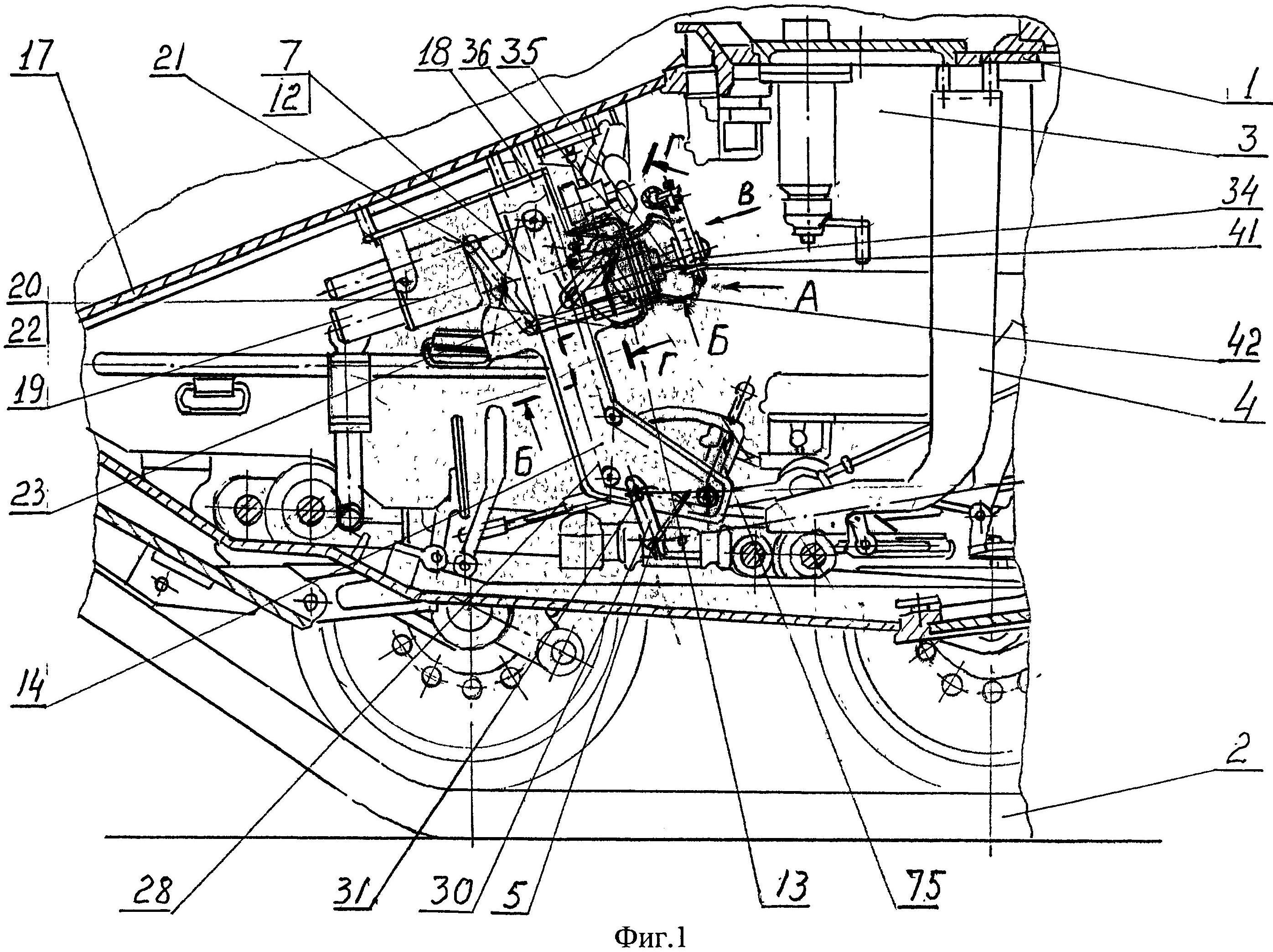
на фиг.1 - общий вид отделения управления движением с дополнительным рулевым приводом (вид слева);
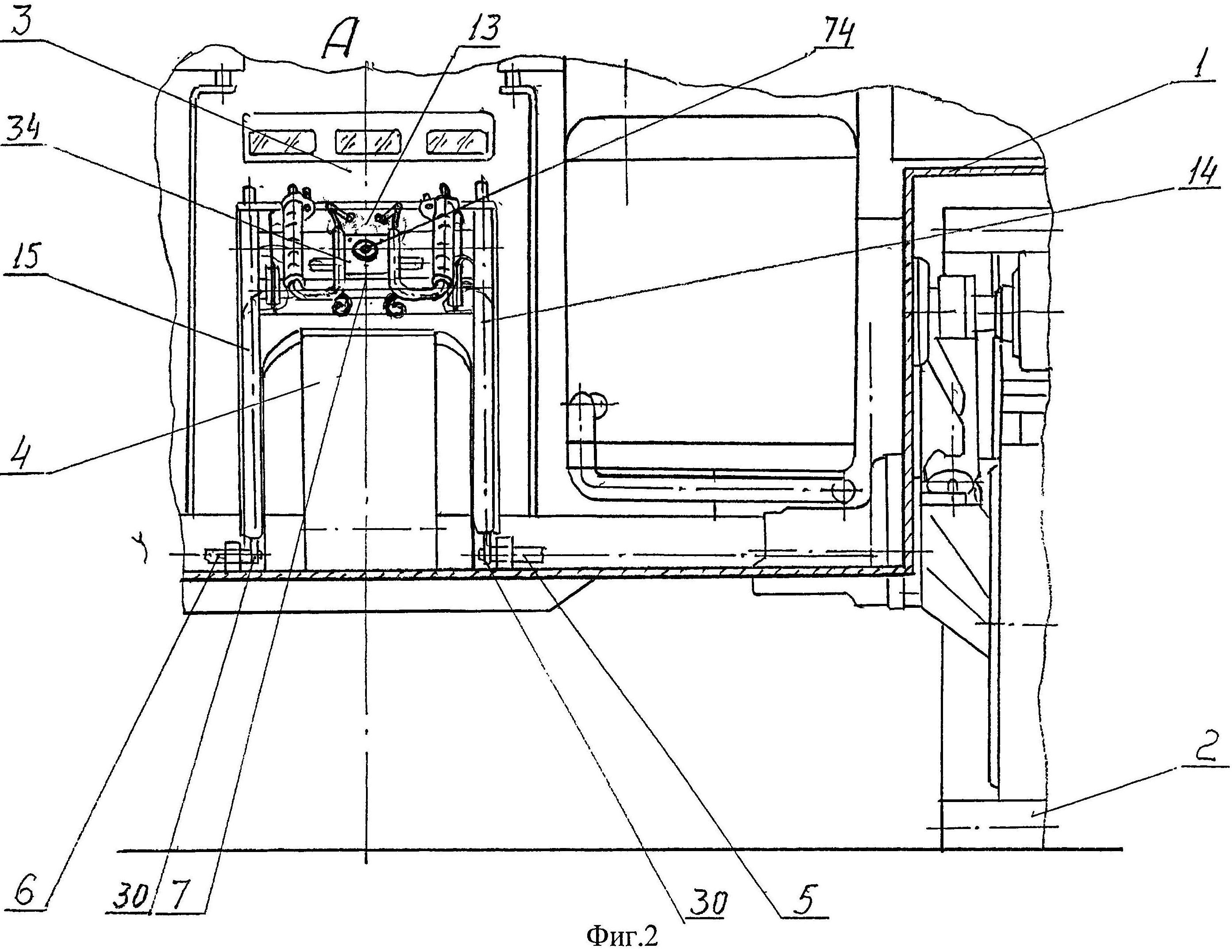
на фиг.2 - общий вид отделения управления движением с дополнительным рулевым приводом (вид сзади по стрелке А);
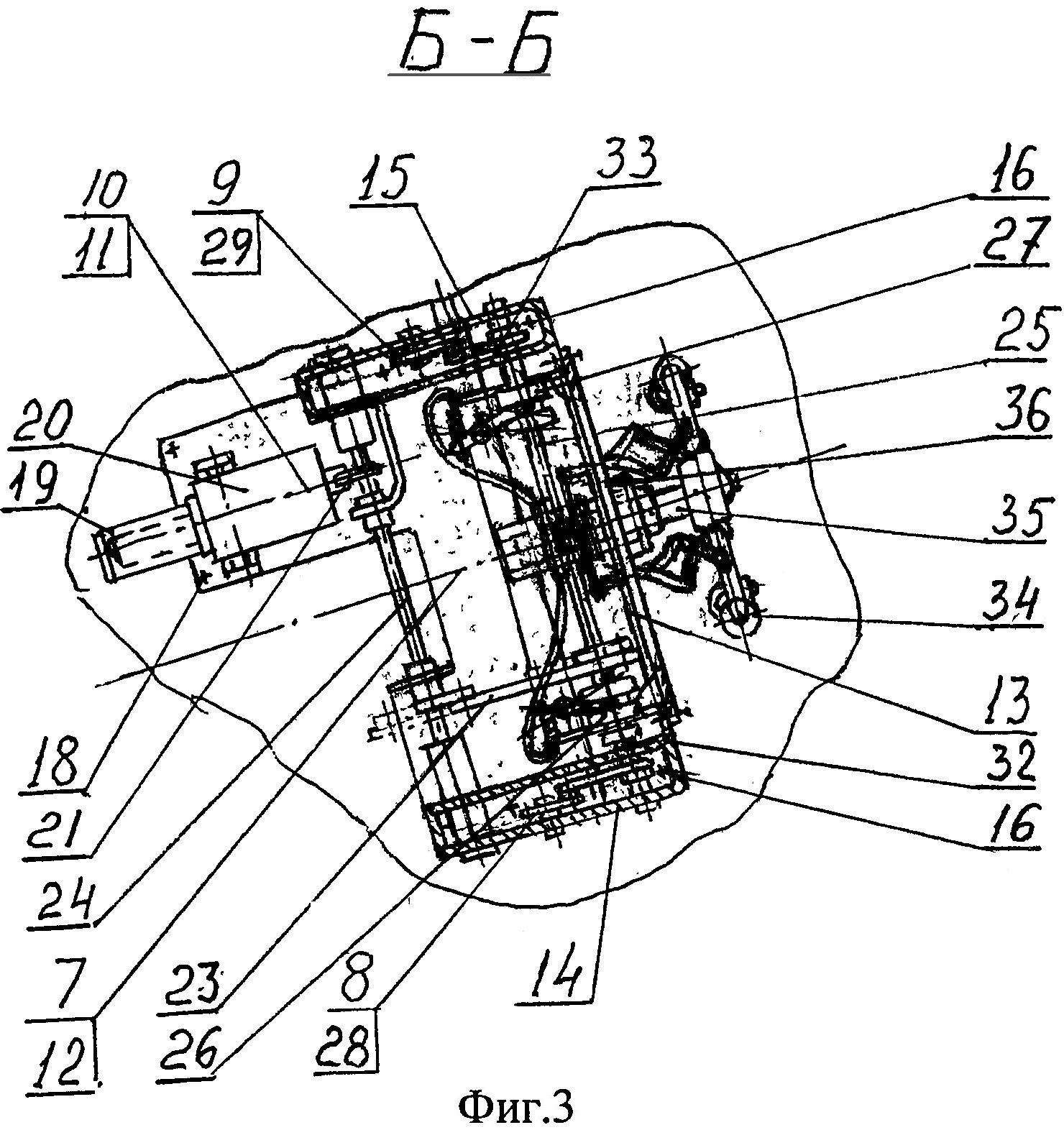
на фиг.3 - общий вид дополнительного рулевого привода (разрез Б-Б);
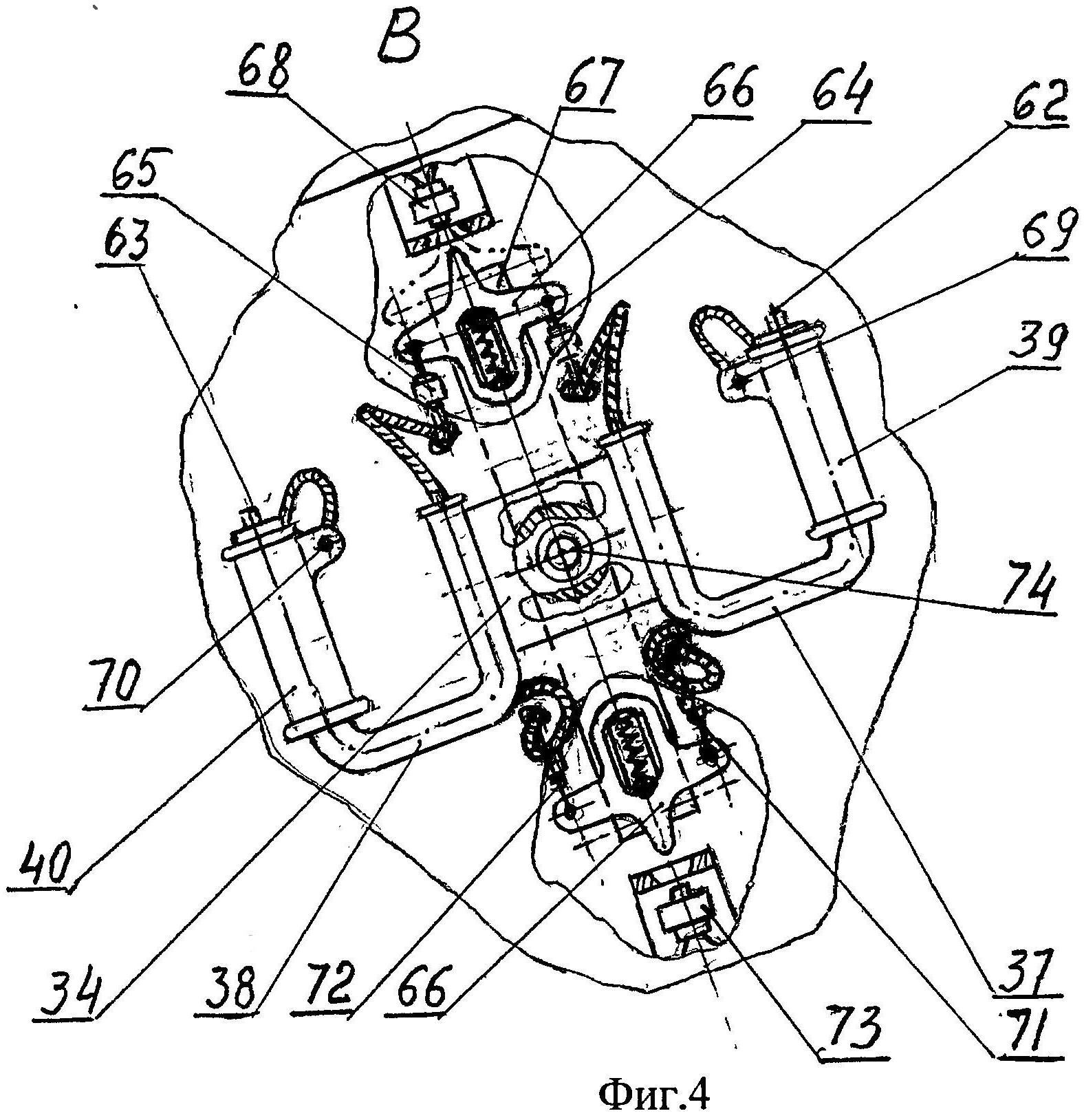
на фиг.4 - рулевое колесо с элементами управления на включение электродвигателя для выполнения подтормаживания прямолинейного движения (вид В);
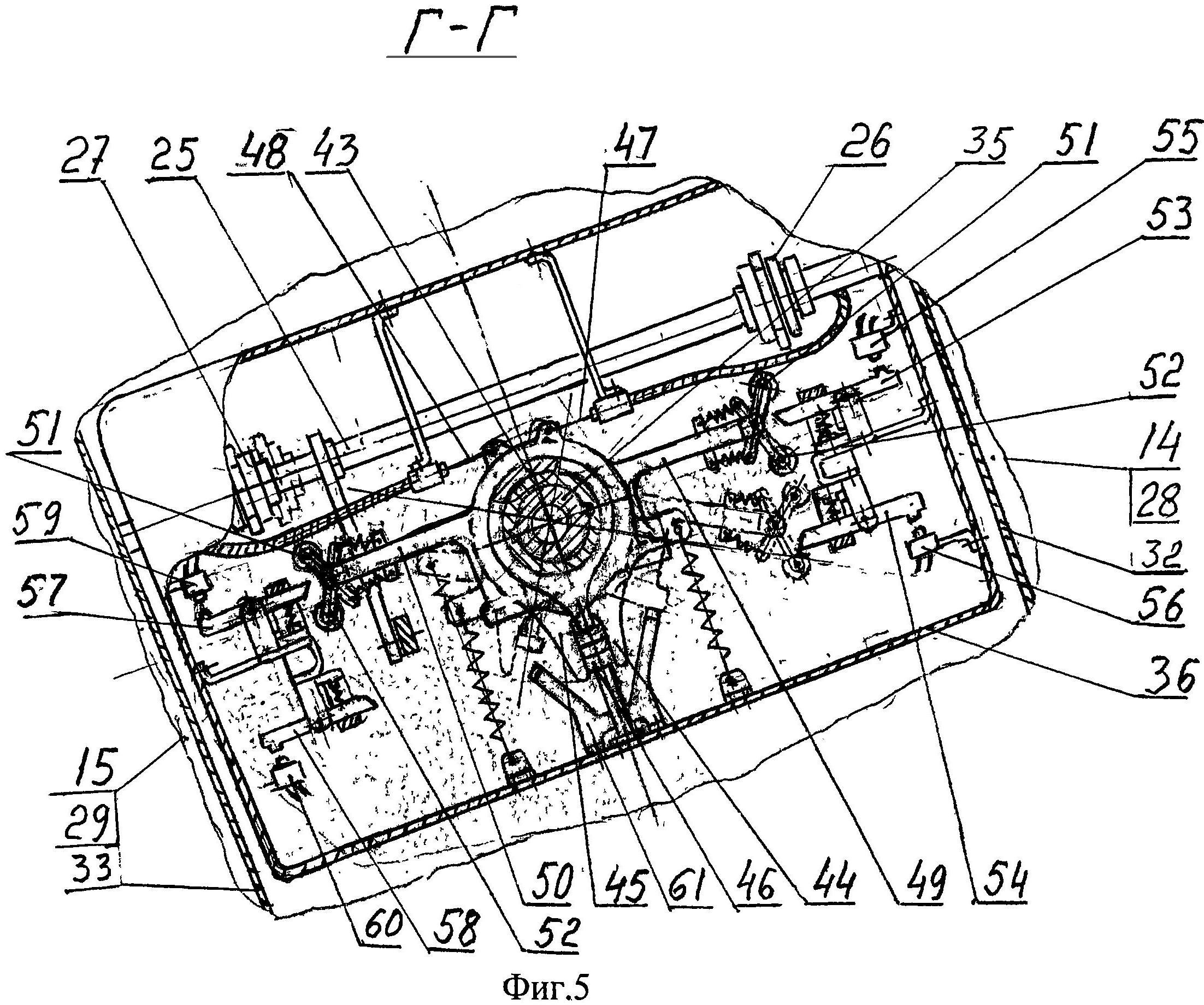
на фиг.5 - поворотный вал с элементами самоустановки рулевого колеса и управления выключения зубчатых муфт цепных передач дополнительного рулевого привода (разрез Г-Г).
Военная гусеничная машина 1 со сторонними гусеничными движителями 2, отделением управления движением 3, в котором по обе стороны от сиденья механика-водителя 4 установлены правый 5 и левый 6 поперечные поворотные валики двух кинематических цепей рулевого привода по изменению направления движения шасси. На поперечные поворотные валики 5 и 6 перед механиком-водителем установлен дополнительный рулевой привод 7, в котором две кинематические цепи 8 и 9 сторонних приводов сведены в одну кинематическую линию 10, содержащую силовой двигатель 11, передающий механическую энергию обратно на эти кинематические цепи избирательно либо на одну линию для затормаживания соответствующего стороннего движителя и прямолинейно движущееся шасси выполняет поворот в сторону подтормаживания, либо одновременно на обе для притормаживания прямолинейного движения.
Дополнительный рулевой привод 7 конструктивно выполнен в виде сборного модуля 12, имеющего П-образную форму в поперечном сечении и составленного из трех блоков: центрального блока 13 и двух боковых - правого 14 и левого 15. Блоки соединены между собой с помощью резьбового соединения 16. Сам модуль 12 в отделении управления движением 2 закреплен к верхнему наклонному корпусному листу 17 военной гусеничной машины 1 с помощью резьбового соединения 18, при этом, боковые блоки опущены соответственно в сторону поперечных поворотных валиков 5 и 6. Силовой привод 11 содержит реверсивный электрический двигатель 19 с редукторной частью 20 и в виде реечной передачи с прямолинейно движущимся звеном - штангой 21, кинематически соединенной с линией 10. В редукторной части 20 на колесе реечной передачи установлены конечные выключатели механизма 22 для избирательности длины выхода штанги 21. Линия 10 конструктивно выполнена в виде рычажного механизма 23 со сдающим звеном в виде торсиона 24, в котором для избирательности включения кинематических цепей 8 или 9 в элементы механизма включения/выключения 25 установлены две управляемые на выключение зубчатые муфты 26 и 27, кинематически связанные с двумя сторонними замкнутыми цепными передачами 28 и 29, выполненные с помощью, например, втулочно-роликовой цепи с шагом звеньев t=12,7 мм. Цепные передачи 28 и 29, установленные соответственно в правый 14 и левый 15 боковые блоки, кинематически соединены с валиками 5 и 6 с помощью рычага 30, на конце которого установлена кулиса 31, позволяющая при сочленении со звеном цепей 28 и 29 образовывать поступательную пару. Длина такого рычага и длина его хорды при базовом угле поворота валиков 5 или 6 соответственно равны 4 и 2-3 диаметрам этих валиков. Боковые блоки 14 и 15 выполнены со съемными крышками 32 и 33, которые закрывают соответствующие цепные передачи 28, 29, обеспечивая механику-водителю в зоне сидения 4 свободную посадку-высадку. Управление работой реверсивного электродвигателя 19 и элементами механизма 25 выполнено с помощью рулевого колеса 34, закрепленного на поворотный вал 35 с последующей его установкой в штурвальную колонку 36, расположенную на центральном блоке 13. Рулевое колесо выполнено, например, в виде двух «U»-образных рукояток 37, 38 с наконечниками 39, 40 для правой и левой руки механика-водителя. Для комфортного размещения в зоне посадки механика-водителя с разной ростовой категорией, рулевое колесо 34 и штурвальная колонка 36 выполнены с элементами регулировки так, что поворотный вал 35 - телескопичен, при этом нижняя часть его с возможной поворотной подвижностью расположена в штурвальной колонке 36, а сама колонка относительно центрального блока 13 установлена с возможностью подвижности по вертикали. Стопорение по окончании регулировки осуществляется соответственно элементами резьбового соединения 41 и 42.
Нижняя часть поворотного вала 35 относительно штурвальной колонки 36 (фиг.5) установлена с возможностью поворота так, что за счет звена 43, закрепленного на этой части вала, поворотных подпружиненных элементов 44, 45 и неподвижного упора 46 на корпусной части штурвальной колонки 36, этот вал с установленным на нем рулевым колесом 34, по окончании силового воздействия механика-водителя на требуемый поворот может возвращаться в нейтральное (исходное) положение до упора 46 за счет воздействия подпружиненных поворотных элементов 44 и 45 на звено 43.
Реверсивный электродвигатель 19 и механизм 25 совместно работают только при выполнении поворотов в обе стороны и в определенной последовательности, при выполнении подтормаживания в работу вступает только электродвигатель 19; команды на их включение и выключение зависят от поворота рулевого колеса 34 совместно с поворотным валом 35 на выполнение поворота в обе стороны, а исходное положение колеса 34, без его поворота, только на выполнение подтормаживания, поэтому расположение элементов на включение и выключение электродвигателя 19 и механизма 25 выполнено следующим образом:
- для выполнения поворотов в обе стороны на поворотных подпружиненных элементах 44, 45 установлены гибкие подвижные звенья 47, 48 в виде тросиков, уложенных в оболочку, свернутую, например, виток к витку из металлической проволоки. Тросики кинематически связаны с подвижными подпружиненными полумуфтами зубчатых муфт 26, 27 так, чтобы при повороте рулевого колеса 34 в правую сторону работает левый поворотный подпружиненный элемент 45 и тросик 48 выталкивает из зацепления левую подпружиненную полумуфту зубчатой муфты 27, а при возвращении колеса 34 в исходное положение действие тросика 48 ослабевает и подпружиненная полумуфта восстанавливает зубчатое зацепление муфты 27. При этом, правый поворотный подпружиненный элемент 44 в работе не участвует, следовательно, муфта 26 остается включенной на передачу силового момента по правому боковому блоку 14 и далее на поворотный поперечный валик 5.
При повороте рулевого колеса 34 влево подобную работу выполняет элемент 44, тросик 47 и муфта 26.
- для включения реверсивного электродвигателя 19 на прямое и обратное вращение его вала, на поворотных подпружиненных элементах 44, 45 дополнительно выполнены жесткие звенья 49, 50, на конце каждого установлены по вертикали
вверху и внизу подпружиненные поворотные рычаги с роликами на концах 51, 52, а против каждого такого звена на корпусной плоскости штурвальной колонки 36 установлены с правой стороны подпружиненные двухплечие рычаги 53, 54 с электровыключателями 55, 56 (для прямого включения и реверса); с левой стороны подпружиненные двуплечие рычаги 57, 58 с электровыключателями 59, 60 (для прямого включения и реверса). Поворот рулевого колеса 34 в обе стороны от нейтрального (исходного) положения ограничен жестким упором 61, установленным на корпусной поверхности штурвальной колонки 36 для стороннего контактирования с ним жестких звеньев 49, 50 на образование сектора поворота в обе стороны в пределах, например, 30°÷35.°
- для выполнения подтормаживания прямолинейно движущегося шасси на верхней торцевой части каждого наконечника 39, 40 установлены кнопки 62, 63 с гибкими подпружиненными звеньями 64, 65 в виде тросиков, каждый из которых заключен в оболочку, например, свернутую виток к витку из металлической проволоки, кинематически связанный с трехплечим рычагом 66, расположенным в кронштейне 67, установленный на верхнюю поверхностную часть нижнего поворотного вала 35 так, что подпружиненная центральная ось рычага 66 относительно этого кронштейна может образовывать две подвижности: либо поворот (при нажатии только одной кнопки 62 или 63 фалангой большого пальца), либо прямолинейно поступательное (при одновременном нажатии этих кнопок, когда рулевое колесо 34 расположено в исходном положении), обеспечивая этим действием своеобразную блокировку на включение реверсивного двигателя 19 с последующим выходом из его редукторной части 20 штанги 21, так как при любом повороте руля 34 в сторону, включение выключателя 68 не произойдет, даже если одновременно нажать кнопки 62 и 63. Электровыключатель 68 установлен на корпусной плоскости штурвальной колонки 36 перед третьим плечом рычага 66.
- на включение реверса электродвигателя 19 около кнопок 62, 63 на наконечниках 39, 40 установлены сторонние кнопки 69, 70 с гибкими подпружиненными звеньями 71, 72 в виде тросиков, заключенных в оболочку, кинематически связанные с трехплечим рычагом 66, расположенный в кронштейне 67, но установлен на нижнюю поверхностную часть нижнего поворотного вала 35 так, что подпружиненная центральная ось рычага 66 относительно кронштейна 67 также может образовывать две подвижности. Электровыключатель 73 установлен на корпусной плоскости штурвальной колонки 36 перед третьим плечом рычага 66. В центральной части рулевого колеса 34 расположена электрическая кнопка 74 для подачи звукового сигнала. Как вариант конкретного исполнения, рядом у правого поперечного поворотного валика 5 установлен автомат переключения скоростей 75, позволяющий вообще исключить участие механика-водителя.
Система управления движением военной гусеничной машины работает в двух режимах:
- подтормаживание прямолинейно движущегося шасси;
- выполнение поворотов шасси в обе стороны. Для подтормаживания прямолинейно движущегося шасси система управления движением работает следующим образом. Рулевое колесо 34 находится в исходном положении. Руки механика-водителя обхватывают сторонние наконечники 39, 40. Электродвигатель 19 дополнительного рулевого привода 7 выключен. Управляемые на выключение зубчатые муфты 26, 27 кинематически соединены со сторонними цепными передачами 28, 29, рычагом 30 и поперечно поворотными валиками 5 и 6. При непредвиденном подтормаживании механик-водитель, удерживая руль 34, одновременно нажимает на кнопки 62, 63, которые с помощью подпружиненных тросиков 64, 65 воздействуют на подпружиненный рычаг 66. В результате, центральное плечо рычага 66, двигаясь прямолинейно, нажимает на электровыключатель 68 и включает электродвигатель 19, работает редукторная часть 20 и выходящее звено - штанга 21 передает силовой импульс по линии 10 рычажного механизма 23 с торсионом 24 на механизм 25 с муфтами 26, 27 и далее на сторонние цепные передачи 28, 29 (кинематических цепей 8 и 9 дополнительного рулевого привода 7) с последующей передачей кинематики на кулисы 31 рычагов 30, которые поворачивают поперечные поворотные валики 5 и 6. Далее по базовым сторонним рулевым приводам силовой импульс передается на переключение (понижение скорости на одну передачу ниже) скорости в коробках передач гусеничных движителей 2. Одновременно с этим, в конце выхода штанги 21 в редукторной части 20 срабатывают конечные выключатели и работа электродвигателя 19 закончена. Для продолжения движения (на прежней скорости) механик-водитель одновременно нажимает расположенные на наконечниках 39, 40 кнопки 69, 70 с подпружиненными гибкими тросиками 71, 72, которые воздействуют на трехплечий подпружиненный рычаг 66 в кронштейне 67. В результате, центральное плечо рычага 66, двигаясь прямолинейно, нажимает на электровыключатель 73 и включает реверс (обратное вращение электродвигателя 19). Штанга 21 движется в обратную сторону и входит в редукторную часть 20. Вместе с этим в обратную сторону срабатывают обе кинематические цепи 8 и 9 дополнительного рулевого привода 7, и рычаги 30 поворачивают поворотные валики 5, 6 в обратную сторону, возвращая базовые сторонние рулевые привода в исходное положение. Гусеничное шасси движется с прежней выбранной скоростью. При этом, в конце вхождения штанги 21 в редукторной части 20 срабатывают конечные выключатели и работа реверса электродвигателя 19 закончена.
Выполнение поворотов
Шасси движется прямолинейно. Рулевое колесо 34 в исходном положении. Руки механика-водителя обхватывают наконечники 39, 40. Электродвигатель 19 дополнительного рулевого привода 7 выключен. Рычаги 30 сторонних поперечных поворотных валиков 5 и 6 находятся в исходном (переднем) положении. Для поворота шасси вправо механик-водитель, удерживая руками наконечники 39, 40, поворачивает рулевое колесо 34 вправо до упора 61 так, что наконечник 39 опускается вниз, а наконечник 40 поднимается вверх. При этом, звено 43 нижней части вала 35 поворачивает подпружиненный поворотный элемент 45 по часовой стрелке, дополнительное жесткое звено 49, установленное на правой стороне, тоже поворачивается по часовой стрелке, а подпружиненный тросик 48, закрепленный на элементе 45, и подпружиненный рычаг 51 с роликом на его конце, установленный на звене 49, работают в следующей последовательности. В начале поворота руля за счет движения тросика 48 выключается зубчатая муфта 27. Затем в работу вступает двухплечий подпружиненный рычаг 53, который, поворачиваясь, нажимает на электровыключатель 55, включает электродвигатель 19. В этот же момент от обратного воздействия подпружиненный рычаг 53 заставляет рычаг 51 повернуться в обратную сторону по отношению звена 49, который продолжает поворот, а его подпружиненный с роликом рычаг 52, контактируя с наклонным торцем левого плеча подпружиненного рычага 54, поворачивается в обратную сторону, опускается вниз (в положение готовности на выполнение реверса работы электродвигателя 19 при обратном повороте руля 34 после контактирования звена 49 с упором 61). Ранее включенный электродвигатель 19 воздействует на свою редукторную часть 20 - штанга 21, двигаясь прямолинейно, воздействует на линию 10 рычажного механизма 23 дополнительном рулевом приводе 7, в котором оставшаяся во включенном состоянии муфта 26 передает силовой вращательный момент на правую цепную передачу 28, а кинематически связанная с ней кулиса 31 рычага 30 поворачивает поперечный поворотный валик 5 в крайнее заднее положение, который по базовому рулевому приводу шасси передает силовой импульс этого момента на понижение (переключение в правой базовой коробке передач) на одну ступень ниже установленной скорости передвижения шасси.
В результате правый гусеничный движитель 2 начинает замедленное движение, а левый движитель продолжает движение с прежней скоростью, происходит изменение направления движения вправо. Продолжительность выполнения поворота определяется временем удержания рулевого колеса 34, повернутого в крайнее правое положение. При этом, в редукторной части 20 конечные выключатели с окончанием выхода штанги 21 прекращают подачу электроэнергии бортовой сети на электродвигатель 19 и весь рулевой привод, включая кинематическую цепь 8 дополнительного рулевого привода 7 и базовый рулевой привод до коробки передач остановлены. Для прекращения процесса поворота и последующего восстановления прямолинейного движения механик-водитель поворачивает рулевое колесо 34 в обратном направлении. С началом выполнения такого реверса элементы механизмов дополнительного рулевого привода 7 срабатывают в следующей последовательности: звено 43 совместно с нижней частью вала 35, совершая обратный поворот, уменьшают воздействие на подпружиненный поворотный элемент 45, который от действия увеличенного усилия в период поворота, совместно с жестким звеном 49 и его рычагами 51 и 52 вынужденно совершают обратный поворот в исходное положение до соприкосновения с упором 46. При этом, рычаг 51 без контактирования с двухплечим подпружиненным рычагом 54 смещается вверх, а рычаг 52, обкатываясь роликовой частью по левой части рычага 54, поднимает его, правая часть, опускаясь, нажимает на электровыключатель 56 и включает реверс обратного вращения электродвигателя 19. Штанга 21 выполняет обратный прямолинейный ход в редукторную часть 20. В результате силовой импульс, воздействуя на рычажный механизм 23, заставляет цепную передачу 28 двигаться в обратном направлении, а кулиса 31 и рычаг 30 поворачивают поперечный поворотный валик 5 в исходное переднее положение и базовый правый рулевой привод за счет переключения коробки передач восстанавливает скорость правого гусеничного движителя 2. В это время, с подходом рулевого колеса 34 в исходное положение происходит окончание поворота элемента 45 со звеном 49 и его подпружиненный рычаг 51, обкатываясь роликом по левой части двухплечего рычага 53, отходит вверх и тоже занимает исходное положение на последующую работу рулевого колеса 34, а конечные выключатели, расположенные в редукторной части 20, выключают электродвигатель 19, причем, после этого завершает работу подпружиненный тросик 48 и обратным ходом включается зубчатая муфта 27. Процесс изменения направления прямолинейного движения закончен. ВГМ движется прямолинейно.
Для поворота шасси влево механик-водитель, удерживая руками наконечники 39, 40, поворачивает рулевое колесо 34 влево до упора 61 так, что наконечник 39 поднимается вверх, а наконечник 40 опускается вниз. При этом, звено 43 нижней части вала 35 поворачивает подпружиненный поворотный элемент 44 против часовой стрелки, дополнительное жесткое звено 50, установленное на левой стороне, тоже поворачивается против часовой стрелки, подпружиненный тросик 47, закрепленный на элементе 44 и подпружиненный рычаг с роликом на его конце 51, установленный на звене 50, работают в следующей последовательности.
В начале поворота руля 34 за счет движения тросика 47 выключается зубчатая муфта 26. Затем, за счет рычага 51 в работу вступает двухплечий подпружиненный рычаг 57, который, поворачиваясь, нажимает на электровыключатель 59 и включает электродвигатель 19. В тот же момент от обратного воздействия подпружиненный рычаг 57 заставляет рычаг 51 повернуться в обратную сторону по отношению звена 50, который продолжает поворот, а его подпружиненный с роликом рычаг 52, контактируя с наклонным торцем правого плеча подпружиненного рычага 58 поворачивается в обратную сторону, тоже опускается вниз (в положение готовности на выполнение реверса работы электродвигателя 19, при обратном повороте рулевого колеса 34 после контактирования звена 50 с упором 61). Ранее включенный электродвигатель 19 воздействует на свою редукторную часть 20 - штанга 21 прямолинейно движется, передает силовой момент по линии 10 на зубчатую муфту 27, через цепную передачу 29, рычаг 30, который поворачивает поперечный поворотный валик 6 в крайнее заднее положение, и далее по базовому рулевому приводу на механизм понижения скорости в левой коробке передач. В результате, левый гусеничный движитель 2 начинает замедленное движение, а правый движитель продолжает движение с прежней скоростью и ВГМ изменяет направление влево. Продолжительность выполнения поворота (также, как и при повороте вправо) определяется временем удержания рулевого колеса 34, повернутого в крайнее левое положение. Для прекращения процесса поворота и последующего восстановления прямолинейного движения механик-водитель поворачивает рулевое колесо 34 в обратном направлении. С началом выполнения такого реверса элементы механизмов дополнительного рулевого привода 7 срабатывают в следующей последовательности.
Звено 43 совместно с нижней частью вала 35, совершая обратный поворот, уменьшают воздействие на подпружиненный поворотный элемент 44, который, в свою очередь, от действия увеличенного усилия подпружиненности в период поворота, совместно с жестким звеном 50 и его рычагами 51 и 52 вынужденно совершают обратный поворот в исходное положение до соприкосновения с упором 46. При этом, рычаг 51 без контактирования с двухплечим подпружиненным рычагом 58 смещается вверх, а рычаг 52 за счет подпружиненности, обкатываясь роликовой частью по правой части рычага 58 поднимает его, левая, опускаясь, нажимает на электровыключатель 60 и включает реверс обратного вращения электродвигателя 19. Штанга 21 выполняет обратный ход в редукторную часть 20. В результате, силовой импульс воздействует на рычажный механизм 23, заставляет цепную передачу 29 двигаться в обратном направлении, а кулиса 31 и рычаг 30 поворачивают поперечный поворотный валик 6 в исходное переднее положение и базовый левый рулевой привод за счет переключения коробки передач восстанавливает скорость левого гусеничного движителя 2. Гусеничное шасси 1 движется прямолинейно. В это время, с подходом рулевого колеса 34 в исходное положение происходит окончание поворота элемента 44 со звеном 50 и его подпружиненный рычаг 51, обкатываясь роликом по правой части двухплечего рычага 57, отходит вверх и тоже занимает исходное положение на последующую работу рулевого колеса 34, а конечные выключатели, расположенные в редукторной части 20, выключают электродвигатель 19, причем, после этого завершает работу подпружиненный тросик 47 и обратным ходом включается зубчатая муфта 26. После этого процесс по изменению направления движения закончен. Военная гусеничная машина продолжает прямолинейное движение.
В результате получено новое качество в вождении транспортного средства с гусеничными движителями, максимально схожее с рулевым управлением транспортного средства.
Универсальное шасси на единой платформе с колесными движителями
Тележка приводная рельсового транспортного средства, преимущественно трамвая с низким полом
Площадка посадочная выдвижная транспортного средства, преимущественно трамвайного вагона с низким полом
Досылатель механизированной укладки снарядов самоходного артиллерийского орудия (сао)
Привод штанговых глубинных насосов
Механизм подачи зарядов с грунта самоходного артиллерийского орудия (сао)
Спаренная артиллерийская установка
Многоцелевое гусеничное шасси
Объект бронетехники на колесном шасси
Артиллерийское орудие с устройством ограничения углов наведения
Универсальное гусеничное шасси на единой платформе
Артиллерийский выстрел раздельного заряжания с переменным метательным зарядом

