Результат интеллектуальной деятельности: УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ-ТРИПОДОМ
Вид РИД
Изобретение
Изобретение относится к области машиностроения и может быть использовано в ручных электродистанционных системах управления погрузочными манипуляторами.
Известен кран-манипулятор с исполнительным механизмом в виде трипода (патент РФ №2207317, МПК В66С 23/44, опубл. 27.06.2003 г.), содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы, на вершинах основания шарнирно закреплены корпуса трех гидроцилиндров. Штоки всех трех цилиндров соединены между собой и с грузозахватным органом. Для поворота основания предусмотрено два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания.
Причинам, препятствующим достижению указанного ниже технического результата является то, управление каждой степенью подвижности манипулятора-трипода осуществляется отдельной рукояткой.
Известно устройство ручного управления подвижным объектом, принятое за прототип (патент РФ №2253593 В64С 13/04, опубл. 10.06.2005 г.), содержащее корпус, рукоятку, кинематически связанную с механическими узлами, пружинные загружатели и электрические датчики положения рукоятки. Управление объектом осуществляется путем создания простых кинематических связей между механическими узлами.
Причинам, препятствующим достижению требуемого технического результата, является то, что устройство обеспечивает одновременное отклонение рукоятки только по двум взаимно перпендикулярным направлениям, т.е. управление осуществляется только двумя обобщенными координатами.
Задача, на решение которой направлено заявляемое изобретение, - увеличение числа одновременно действующих управляющих воздействий на объект управления.
Технический результат - повышение удобства и точности ручного управления манипулятором-триподом.
Указанный технический результат достигается тем, что манипуляционная рукоятка установлена посредством сферического шарнира на платформе, связанной с рукоятью-подлокотником, а на стержне манипуляционной рукоятки установлена скользящая втулка, на внешней поверхности которой по окружности через 120° размещены сферические шарниры, в которых крепятся штанги датчиков позиционирования, другие концы которых связаны с платформой посредством цилиндрических шарниров. Датчики позиционирования имеют ограничительные пластины и демпферы, между которыми установлены возвратные пружины, а на ограничительных пластинах установлены постоянные магниты, воздействующие на герметизированные магнитоуправляемые контакты, а электроуправляемые распределители управляются электронными ключами, подключенными в свою очередь к датчикам позиционирования.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существующим признакам заявленного объекта.
Следовательно, заявленное предполагаемое изобретение соответствует требованию «новизна» по действующему законодательству.
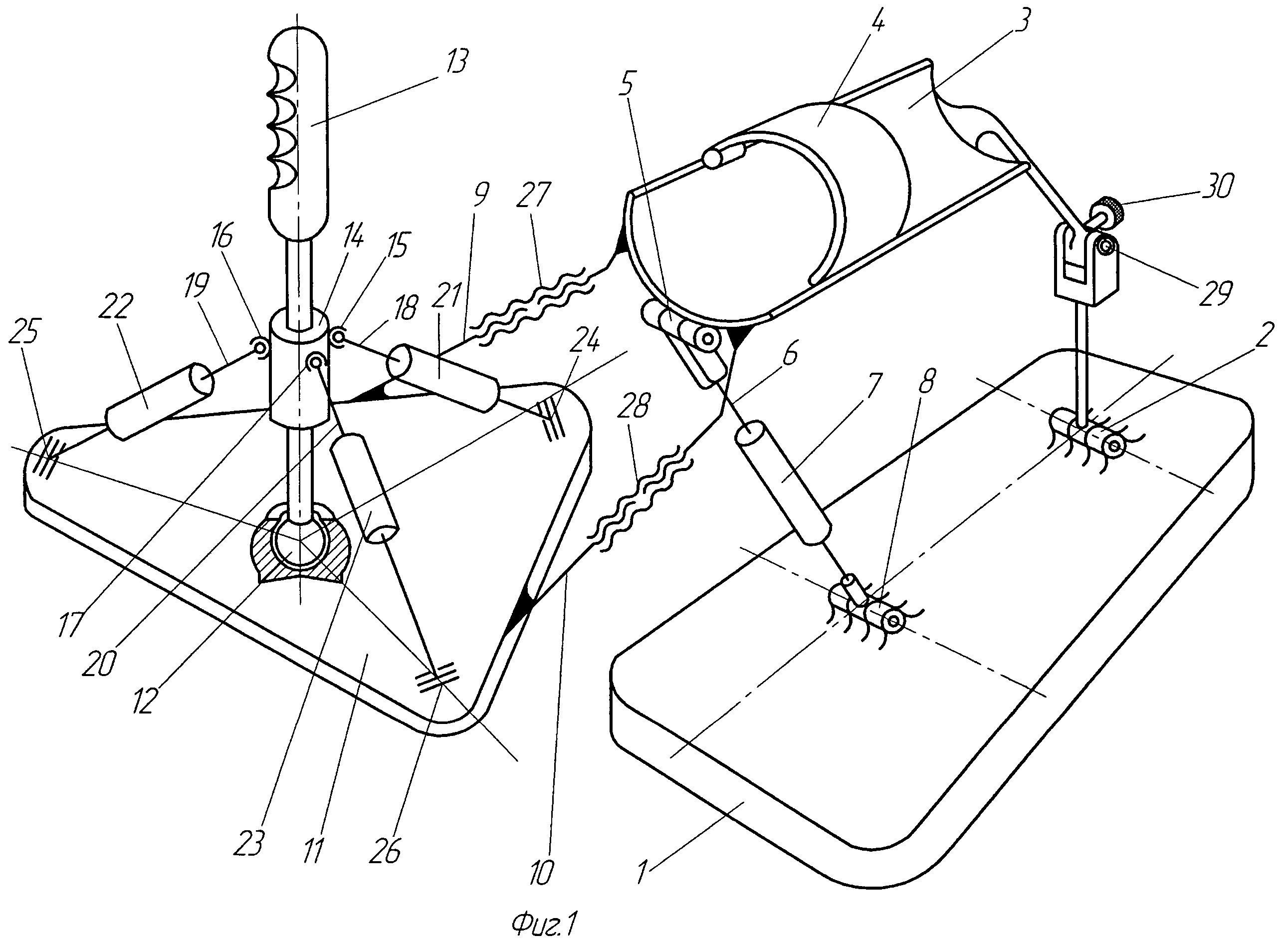
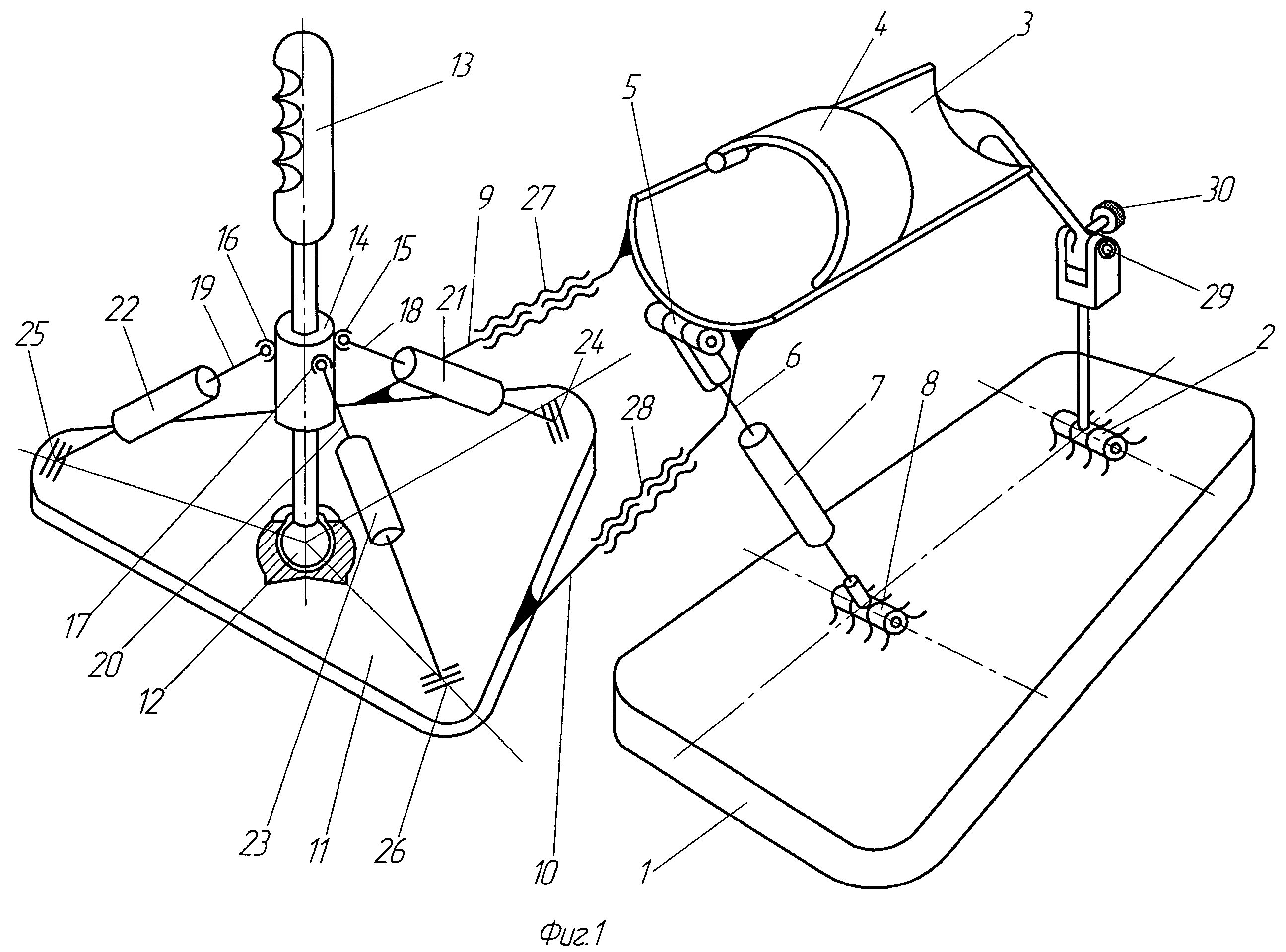
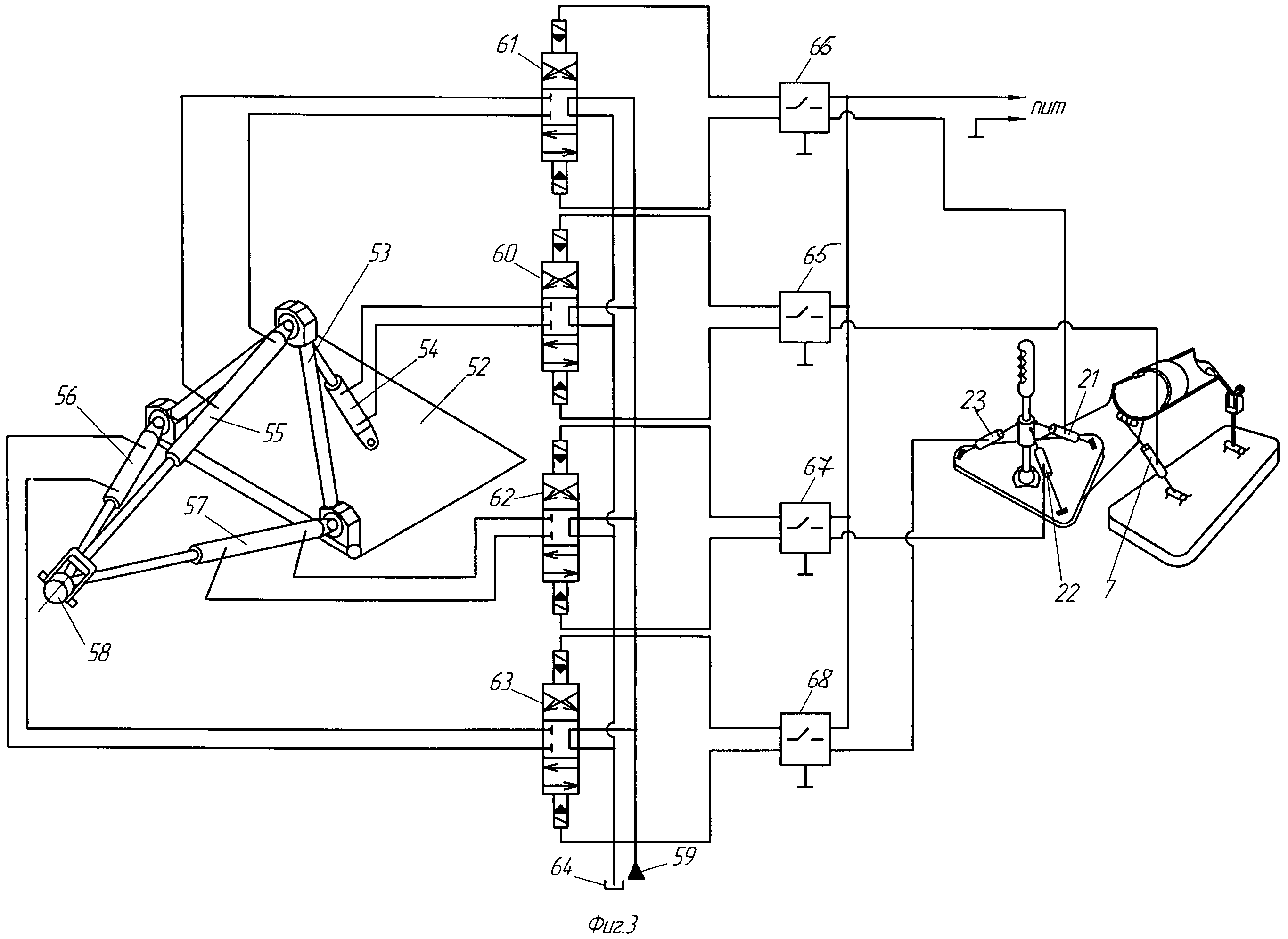
На фиг.1 приведено устройство управления манипулятором-триподом, на фиг.2 - датчик позиционирования, на фиг.3 - электрогидравлическая схема системы управления манипулятором-триподом.
Устройство состоит из корпуса 1, на котором посредством цилиндрического шарнира 2 установлена рукоять-подлокотник 3, имеющей откидной обхват 4, к нижней стороне рукояти-подлокотника 3 в шарнире 5 крепится штанга 6 датчика позиционирования 7, который в свою очередь имеет цилиндрическое шарнирное соединение 8 с корпусом 1. К рукояти-подлокотнику 3 крепится стержнями 9 и 10 платформа 11, на которой посредством сферического шарнира 12 установлена манипуляционная рукоятка 13 так, чтобы она находилась на уровне кисти руки оператора, предплечье которого располагается на рукояти-подлокотнике 3. На стержне манипуляционной рукоятки 13 установлена скользящая втулка 14 на внешней поверхности которой по окружности через 120° размещены сферические шарниры 15, 16, 17 к которым в свою очередь крепятся штанги 18, 19, 20 датчиков позиционирования 21, 22, 23 соответственно. Датчики позиционирования 21, 22 и 23 с другой стороны крепятся к платформе 11 посредством цилиндрических шарниров 24, 25 и 26. В стержнях 9 и 10 имеются резьбовые муфты 27 и 28 для регулировки положения платформы 11 относительно рукояти-подлокотника 3, а наклон рукояти-подлокотника 3 в свою очередь может регулироваться поворотом в цилиндрическом шарнире 29 и фиксироваться в заданном положении стопорным винтом 30.
Датчики позиционирования 7, 21, 22, 23 выполнены однотипно и состоят из корпуса датчика 31, (фиг.2) к которому крепится присоединительная штанга 32, в корпус датчика 31 входит другая присоединительная штанга 33 на которой закреплены ограничительные пластины 34 и 35, внутри корпуса датчика 31 к его стенкам прикреплены цилиндры демпферов 36 и 37, заполненных демпфирующей жидкостью 38 и.внутри которых перемещается поршень 39 и 40 соответственно, имеющих дроссельные отверстия 41. Поршни 39 и 40 жестко соединены со штоками 42 и 43 соответственно, которые в свою очередь крепятся к ограничительным пластинам 34 и 35. Между ограничительными пластинами 34, 35 и цилиндрами демпферов 36, 37 установлены возвратные пружины 44 и 45. На ограничительных пластинах 34, 35 установлены постоянные магниты 46, 47, а напротив них на некотором расстоянии к цилиндрам демпферов крепятся герметизированные магнитоуправляемые контакты (герконы) 48 и 49 соответственно, от герконов 48 и 49 наружу корпуса датчика 31 выведены разъемы 50 и 51.
Электрогидравлическая система управления манипулятором (фиг.3) состоит из непосредственно манипулятора-трипода, состоящего из основания 52, поворотной рамы 53, поворотного цилиндра 54, который с одной стороны шарнирно крепится к поворотной раме 53, а с другой к основанию 52, на поворотной раме 53 к ее вершинам крепятся шарнирно гидроцилиндры 55, 56, 57, другие концы которых сходятся в одной точке в унифицированном шарнире 58, образуя трипод. Подача рабочей жидкости к гидроцилиндрам осуществляется от напорной магистрали 59 гидросистемы к электроуправляемым распределителям 60, 61, 62 и 63, слив жидкости осуществляется в бак 64. Электромагниты золотников распределителей 60, 61, 62 и 63 управляются электронными ключами 65, 66, 67 и 68 соответственно, которые подключены к датчикам позиционирования 7, 21, 22 и 23 устройства управления манипулятором-триподом по фиг.1.
Устройство работает следующим образом.
Для наклона вперед поворотной рамы 53 (фиг.3) оператор предплечьем наклоняет вниз рукоять-подлокотник 3 (фиг.1), которая воздействует на датчик позиционирования 7, перемещая штангу 6 вниз. Далее (фиг 2) штанга 33 перемещаясь вправо (по рис) ограничительной пластиной 34 сжимает упругий элемент 44 с одновременным перемещением штоков 42 и 43 демпферов. Поршни 39 и 40 демпферов перемещаясь в цилиндрах 36 и 37 испытывают вязкое сопротивление за счет дросселирования жидкости через дроссельные отверстия 41, тем самым позволяют плавно перемещать ограничительные пластины 34 и 35 внутри корпуса датчика 31 и исключать случайные включения электроуправляемых распределителей. При дальнейшем движении штанги 33, ограничительной пластины 34 постоянный магнит 46 приближается к геркону 48 замыкает его контакты, начиная пропускать электрический ток к электронному ключу 65 (фиг.3), который в свою очередь включает электромагниты золотника распределителя 60, перемещая золотник вниз (по схеме) и тем самым открывает подачу рабочей жидкости от напорной магистрали 59 к поршневой полости гидроцилиндра 54. Поворотная рама 53 (фиг.3) начинает наклоняться вперед пока на датчик позиционирования 7 (фиг.1) осуществляется давление предплечья оператора. Как только оператор перестанет оказывать усилие на рукоять-подлокотник 3 пружины 44 и 45 (фиг.2) вернут ограничительные пластины 34 и 35 вместе со штангой 33 в исходное положение, а соответственно при удалении постоянного магнита 46 от геркона 48 разомкнется электрическая цепь, электронный ключ 65 (фиг.3) отключит от питания электромагниты золотника распределителя 60, вернув золотник в нейтральное положение, поворотная рама 53 остановится. Для наклона рамы 53 назад рукоять-подлокотник 3 следует потянуть вверх, передача управляющих сигналов в этом случае аналогична выше описанному.
Для управления охватом в пространстве, размещенном на универсальном шарнире 58 (фиг.3) необходимо управлять несколькими гидроцилиндрами одновременно. Управление гидроцилиндрами 55, 56, 57 аналогично управлению гидроцилиндром 54, все зависит от того, на какой датчик позиционирования 21, 22 или 23 (фиг.1) оказывается воздействие и в какую сторону перемещаются штанги 18, 19, 20. Если оператор перемещает манипуляционную рукоятку 13 от себя, то штанга 18 вытягивается из датчика позиционирования 21, а штанги 19 и 20 вталкиваются в датчики позиционирования 22 и 23. Вследствие чего шток гидроцилиндра 55 (фиг.3) выдвигается, а штоки гидроцилиндров 56 и 57 втягиваются. Для управления только двумя гидроцилиндрами, например 55 и 56 (фиг.3) оператору необходимо манипуляционной рукояткою 13 (фиг.1) совершить пространственное движение относительно сферического шарнира 12 по окружности относительно датчика позиционирования 23, не оказывая на него силового воздействия, в этом случае в движение придут штанги 21 и 22, сигнал от которых поступит на электронные ключи 66 и 68 приводя в движение гидроцилиндры 55 и 56.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
- Средство предназначено для повышения удобства и точности ручного управления манипулятором-триподом.
- Средство, воплощающее заявленный объект, способно обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленное изобретение соответствует требованию промышленная применимость по действующему законодательству.

Мехатронное прицепное устройство
Аварийно-спасательная машина
Устройство для стабилизации крутящего момента на ведущих колесах транспортного средства
Стабилизатор крутящего момента
Стенд для испытания гидроподъемников
Аварийно-спасательная машина
Манипулятор-трипод параллельно-последовательной структуры
Высевающий аппарат для посева замоченных и пророщенных семян пропашных, овощных и бахчевых культур
Волновой высевающий аппарат
Способ выращивания рапса ярового на семена
Способ тепловой обработки зерна
Устройство для рыхления почвы роторного типа
Способ подготовки семян тыквы к посеву
Очистка зерноуборочного комбайна
Очистка зерноуборочного комбайна
Рабочий орган почвообрабатывающего орудия
Плуг-рыхлитель

