Результат интеллектуальной деятельности: АГРОМОСТ ДВУХКОЛЕСНЫЙ Н.П. ДЯДЧЕНКО
Вид РИД
Изобретение
Изобретение относится к транспортным системам и направлено на исследование, разработку и создание энергоэффективных движителей транспортных систем и управления ими, может быть использовано, в частности, для выполнения работ сельскохозяйственного назначения на относительно небольших (приусадебных или фермерских) участках преимущественно равнинного типа.
Известен агромост двухколесный /см. пат. №2298304 (Кл. А01В 49/00) от 04.04.2005/, содержащий монорельсовую направляющую для унифицированной платформы под сменные сельскохозяйственные орудия, консолями смонтированную в колесах с ободами, выполненными по схеме шарикоподшипника и имеющими индивидуальный бортовой привод вращения обода.
При всех достоинствах и оптимальности конструктивной схемы известного агромоста последний может быть усовершенствован в части улучшения мобильности и упрощения управляемости агромоста на разных грунтах путем перераспределения нагрузки в продольной плоскости двухколесного шасси.
Заявленная цель достигается тем, что в агромосте двухколесном, содержащем монорельсовую направляющую для унифицированной платформы под сменные сельскохозяйственные орудия, консолями смонтированную в колесах с ободами, выполненными по схеме шарикоподшипника и имеющими индивидуальный бортовой привод вращения обода, а на невращающейся части колеса дополнительно смонтированы на равном уровне подвески два опорных колеса. При этом ось вращения каждого из опорных колес может быть фиксируема на окружности с центром на уровне подвески опорных колес. При этом опорные колеса могут быть выполнены в виде ободов, соединенных со ступицей колес единственной спицей, когда обод и спица колеса принадлежат разным плоскостям, или в виде шарообразного самоориентирующегося колеса.
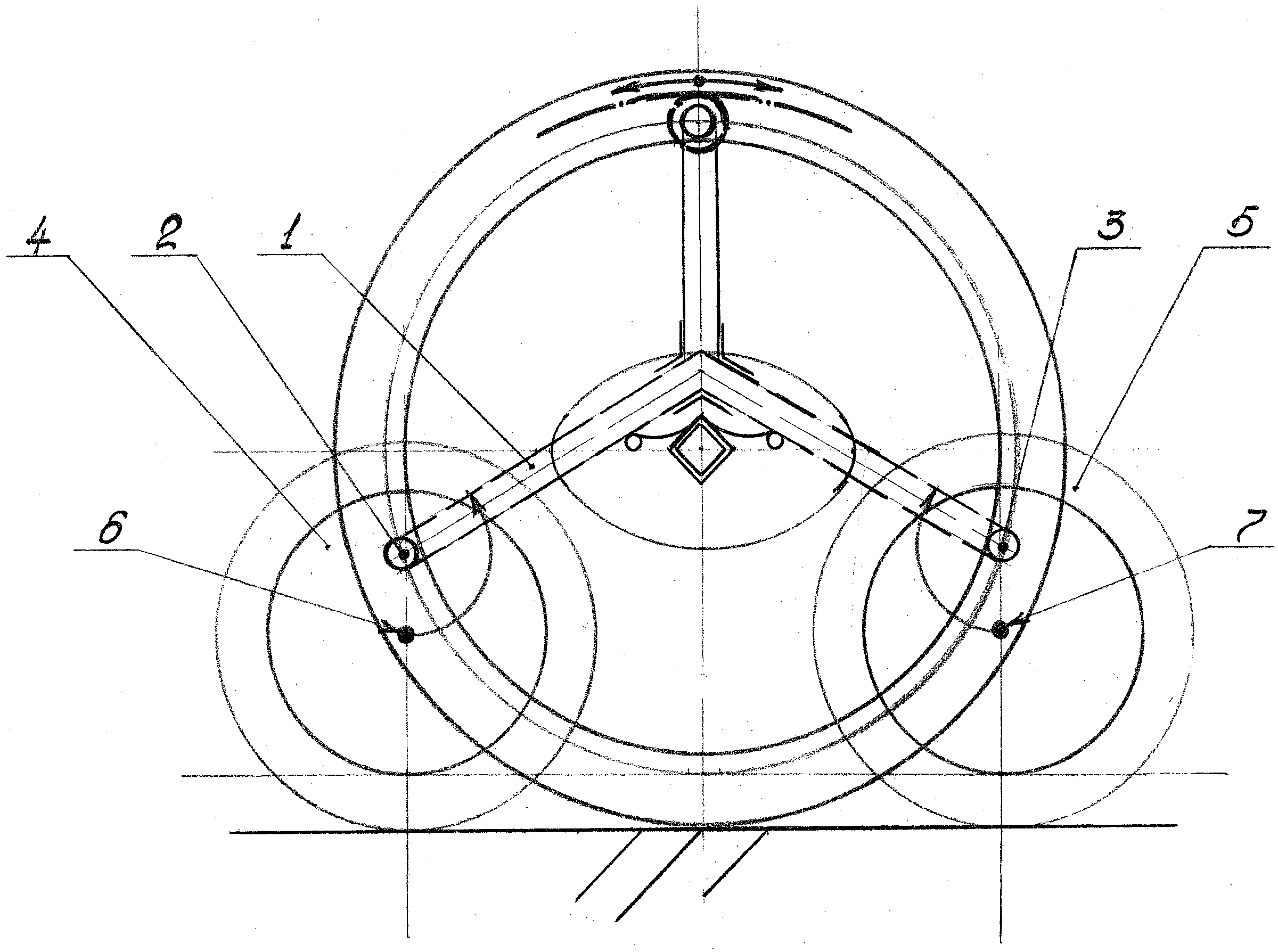
На чертеже изображено колесное шасси предлагаемого агромоста двухколесного.
Колесо агромоста двухколесного содержит монорельсовую направляющую для унифицированной платформы под сменные сельскохозяйственные орудия, консолями смонтированную в колесах с ободами, выполненными по схеме шарикоподшипника и имеющими индивидуальный бортовой привод вращения обода, на невращающейся части 1 колеса смонтированы на равном уровне подвески 2 и 3, например, посредством кривошипов два опорных колеса 4 и 5 соответственно. При этом ось вращения 6 опорного колеса 4 и ось вращения 7 опорного колеса 5 могут быть зафиксированы (независимо друг от друга) на окружности с центром на уровне подвески 2 и 3 соответственно опорных колес 4 и 5. При этом опорные колеса 4 и 5 могут быть выполнены в виде ободов, соединенных со ступицей колеса единственной спицей, когда обод и спица колеса принадлежат разным плоскостям /см. пат. №2455171 (кл. В60В 1/00) от 11.03.2011/ ,или в виде шарообразного самоориентирующегося колеса /см. пат. №2275892 (кл. A61G 5/04, 5/00) от 03.09.2004/. Для работы агромоста с тяжеловесными орудиями и агрегатами опорные колеса 4 и 5 могут быть выполнены по образу и подобию поворотных колесных опор /см. авт. свид. №925684 (кл. В60В 33/02) от 30.07.1980/.
При длительной стоянке или движении с реверсом нагруженного равномерно в продольном отношении агромоста по ровной плотной поверхности опорные колеса 4 и 5 занимают своей нижней опорной частью общий уровень горизонта с колесом агромоста (см. чертеж) Если, к примеру, агромост нагружен неравномерно в продольном отношении, одно из опорных колес (4 или 5) может быть приподнято и зафиксировано над общим горизонтом, для чего ось вращения (6 или 7) соответствующего опорного колеса (4 или 5) предварительно поворачивается на технологически приемлемый уровень вокруг соответствующей подвески (2 или 3) и фиксируется (механизм поворота и фиксации не показан) на невращающейся части 1 колеса агромоста. Предлагаемое техническое решение делает устойчивым двухколесное шасси, улучшая мобильность и упрощая управляемость агромоста двухколесного.
Принудительное изменение соотношения скорости вращения ободов неповоротных колес разных бортов-консолей агромоста обеспечивает минимальный (в том числе, нулевой) радиус поворота транспортному средству с опорными колесами, стабилизирующими продольную устойчивость двухколесного агромоста предлагаемой конструкции.
Управление движителями транспортной системы возможно: а) с пульта, соединенного кабелем с индивидуальными электроприводами бортов; б) дистанционное; в) программируемое на автономное движение по заданному маршруту.
Таким образом, предлагаемое техническое решение, по мнению заявителя, является новым, имеет изобретательский уровень и промышленно применимо.
Колесо со сменным протектором - бесконечной гусеницей
Мачта
Противоугонное устройство автомобиля
Шасси двухколесное самоустанавливающееся
Транспортное средство
Кольцевой роллер
Колесно-гусеничное шасси н.п. дядченко
Мост-пандус переносной
Кольцевой роллер
Шнекоход
Колесо со сменным протектором - бесконечной гусеницей
Мачта
Рулевое колесо транспортного средства
Противоугонное устройство автомобиля
Шасси двухколесное самоустанавливающееся
Транспортное средство
Кольцевой роллер
Колесно-гусеничное шасси н.п. дядченко
Мост-пандус переносной
Кольцевой роллер

