Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ПУТЕМ ПОВОРОТА ИНЕРЦИАЛЬНОГО УСТРОЙСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Предметом данного изобретения является способ определения курса с помощью инерциального устройства, которое может использоваться, например, в качестве гирокомпаса и для определения направления севера.
Уровень техники
Известно, что определение курса производится с помощью инерциального устройства, измеряющего и позиционирующего направление движения в зависимости от вращения Земли, т.е., определяющего направление востока и запада.
Такое инерциальное устройство включает в себя вибрационный угловой датчик, включающий в себя резонатор с детекторным устройством и вибрационным устройством для ввода резонатора в состояние вибрации, соединенными с управляющим устройством. Вибрационное устройство использует высокое электрическое напряжение.
Курс может быть определен путем контроля углового датчика в режиме свободного гироскопа, при котором направление его вибрации может свободно изменяться в угловой системе координат резонатора. Изменение направления вибрации происходит под действием вращения Земли, а угловое перемещение вибрации регистрируется для определения направления севера. Данный режим работы является преимущественным, поскольку он позволяет производить измерения в большом интервале, обеспечивает стабильный масштабный коэффициент и незначительно зависит от качества высокого напряжения. Однако в этом режиме работы присутствуют нелинейные систематические ошибки вследствие использования аналого-цифровых преобразователей, служащих причиной недостаточной непрерывности регистрируемого сигнала. Данные ошибки снижают рабочие характеристики, в частности, вблизи значений углов 0°, 90°, 180°, 270°, так как обработка результатов измерений базируется на синусах и косинусах этих углов.
Курс может быть определен путем управления угловым датчиком в режиме прецессионного гироскопа, при котором поддерживается заданный угол его вибрации в системе координат резонатора. Энергию, требующуюся для сохранения указанного угла колебаний, несмотря на влияние вращения Земли, регистрируют для определения направления севера. Данный режим работы является преимущественным, поскольку он дает погрешность, являющуюся стабильной для заданного электрического угла поворота, но, в отличие от указанного выше режима, он дает масштабный коэффициент, зависящий от качества высокого напряжения.
Раскрытие изобретения
Целью настоящего изобретения является создание устройства для дальнейшего улучшения характеристик при определении курса с помощью инерциального устройства.
С этой целью, настоящее изобретение предлагает способ определения курса с помощью инерциального устройства, содержащего, как минимум, один вибрационный угловой датчик с резонатором, связанным с детекторным устройством, и устройством для ввода данного резонатора в состояние вибрации, соединенными с управляющим устройством, служащим для обеспечения первого режима работы, при котором направление вибрации может свободно изменяться в угловой системе координат резонатора, и второго режима работы, при котором поддерживается определенный угол колебаний вибратора в системе координат резонатора, а также метод, включающий в себя операции:
- управления указанным датчиком во втором режиме работы для сохранения заданного электрического угла поворота, соответствующего наименьшей величине погрешности датчика; и
- управления указанным датчиком в первом режиме работы для измерения курса и управления указанным датчиком во втором режиме работы после измерения курса и до следующего измерения с целью сохранения заданного электрического угла поворота.
Таким образом, угловой датчик работает как прецессионный гироскоп до тех пор, пока инерциальное устройство не получит команду на определение курса, и как свободный гироскоп во время измерения курса. Работа в режиме прецессионного гироскопа служит для сохранения направления вибрации, при котором гироскоп обеспечивает наилучшие характеристики. Во время проведения измерений датчик работает в режиме свободного гироскопа; поскольку замеряемая угловая скорость является низкой, порядка 15 градусов в час, а также, поскольку измерение происходит в течение короткого периода времени, около 2 минут, вибрация остается близкой к заданному углу. Это дает возможность получить высокую точность измерений.
Предпочтительно, детекторное устройство соединено с управляющим устройством, как минимум, с помощью одного аналого-цифрового преобразователя, и обеспечивающее наименьшую погрешность значение выбирается в зависимости от динамического диапазона преобразователя.
Это создает погрешность, которая оказывает основное влияние на характеристики датчика.
Предпочтительно, предлагаемый способ предусматривает этап предварительной тарировки, на котором производится ряд измерений для различных углов колебаний, и выбирается тот из них, который обеспечивает наименьшую величину погрешности измерений.
Этап предварительной тарировки дает возможность определить угол колебаний, обеспечивающий минимальную погрешность, характерную для рассматриваемого датчика и имеющихся реальных условий измерения.
Предпочтительно, измерение производится по окончании стабилизационного периода, имеющего место при переходе от второго режима работы к первому.
Это дает возможность ограничить нежелательное влияние режима прецессионного гироскопа на точность измерений в режиме свободного гироскопа.
Другие отличительные признаки и преимущества настоящего изобретения станут ясны после ознакомления с приведенным ниже описанием одного из возможных вариантов его осуществления, не являющимся ограничивающим.
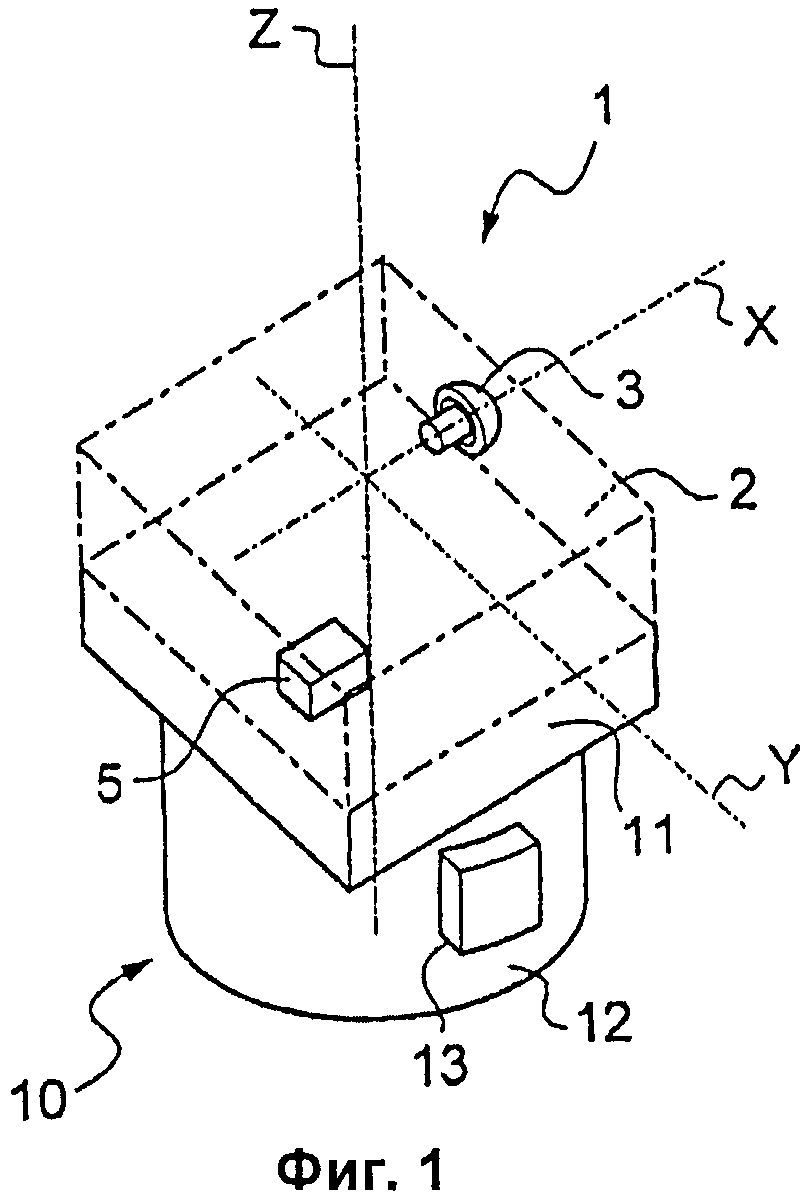
В описании делаются ссылки на позиции Фиг.1, на которой представлена схема инерциального устройства для реализации способа, предлагаемого настоящим изобретением.
Осуществление изобретения
Как видно из Фиг.1, предлагаемый способ реализуется с помощью инерциального устройства 1, содержащего платформу 2 (схематически показана штрихпунктирными линиями) с установленным на ней обычным способом вибрационным угловым датчиком 3. Конструкция самого вибрационного датчика 3 в целом хорошо известна. Для лучшего понимания способа, предлагаемого настоящим изобретением, мы здесь приведем описание лишь нескольких деталей вибрационного углового датчика 3. Вибрационный угловой датчик 3 включает в себя выполненный из кварца осесимметричный резонатор, оснащенный электродами, которые в режиме возбуждения служат для приведения резонатора в колебательное движение, симметричное относительно оси, перпендикулярной оси симметрии вибрационного углового датчика 3; угловое положение резонатора относительно оси симметрии может регулироваться, когда датчик работает в режиме прецессионного гироскопа, посредством электрического регулирования электродов соответствующим способом, известным под названием "контроль прецессии". Данные электроды используются также в режиме обнаружения для определения угловой ориентации вибрации. Когда угловой датчик используется в режиме свободного гироскопа, ориентацию вибрации относительно оси оставляют свободной, и смещение направления вибрации можно использовать для получения информации относительно изменения углового положения датчика.
Инерциальное устройство установлено на поворотном устройстве 10, включающем в себя поворотный стол 11, установленный на поворотном основании 12, обеспечивающем возможность поворота поворотного стола 11 относительно перпендикулярной к нему оси. Поворотное основание 12 включает в себя систему регулирования 13 для регулирования угла поворотного стола относительно его оси вращения. Данный тип системы регулирования угла известен; он применяется, например, в делительных дисках металлорежущих станков. Например, система регулирования угла может содержать устройство для фиксации поворотного стола в заданных положениях (фиксирующие элементы, например, могут включать в себя радиальный болт, прикрепленный к поворотному столу, входящий в отверстия, выполненные в неподвижном корпусе поворотного основания 12 поворотного устройства). Поворотный стол 11 выставляется горизонтально, например, с помощью уровнемеров, закрепленных на поворотном устройстве 10. Поворотное устройство, предпочтительно, включает в себя электропривод для вращения поворотного стола 11. В случае применения акселерометров в инерциальном устройстве 1, они могут использоваться для определения угла наклона поворотного стола поворотного устройства и прикрепленного к поворотному столу инерциального устройства, таким образом, что угол наклона можно будет учитывать известным способом для горизонтального позиционирования инерциального устройства с целью определения курса.
Вибрационный угловой датчик 3 соединен с управляющим устройством 5, служащим для управления вибрационным угловым датчиком 3, а также для получения и использования сигналов, поступающих от вибрационного углового датчика.
Управляющее устройство 5 предназначено для реализации программы регулирования инерциального устройства в режиме гирокомпаса. Данная программа осуществляет предлагаемый настоящим изобретением способ определения курса, в частности, определения направления севера.
Предлагаемый способ включает в себя следующие операции:
- управление датчиком в режиме прецессионного гироскопа для сохранения заданного электрического угла поворота его колебаний, соответствующего наименьшей величине погрешности датчика;
- управление указанным датчиком в режиме свободного гироскопа для измерения курса и управления указанным датчиком после измерения курса и до следующего измерения с целью сохранения заданного электрического угла поворота колебаний.
Вышеупомянутое измерение производится после стабилизационного периода, имеющего место при переключении с режима прецессионного гироскопа на режим свободного гироскопа, с целью обеспечения возможности стабилизации углового датчика и его колебаний.
Детекторное устройство соединено с управляющим устройством 5, как минимум, с помощью одного аналого-цифрового преобразователя, а обеспечивающее наименьшую погрешность значение выбирается в зависимости от динамического диапазона преобразователя. В рассматриваемом примере, обеспечивающее минимальную погрешность значение составляет приблизительно 45°.
В качестве варианта осуществления изобретения, предлагаемый способ предусматривает этап предварительной тарировки, на котором производится ряд измерений при различных углах колебаний, и выбирается тот из них, который обеспечивает наименьшую величину погрешности измерений.
В другом варианте осуществления изобретения, операция измерения, в сущности, состоит из трех последовательных измерений, и включает следующие операции:
- установку инерциального устройства 1 последовательно в трех угловых положениях относительно вертикальной оси Z;
- настройку электрических углов вибрационного углового датчика 3 на заданное значение, обеспечивающее минимальную погрешность, и измерение курса для каждого углового положения; и
- определение курса по результатам измерений курса и угла между тремя угловыми положениями.
Указанные три угловых положения смещены друг относительно друга на 120°; их получают путем поворота поворотного стола таким образом, чтобы установить инерциальное устройство последовательно в трех положениях. Когда поворотный стол установлен неподвижно в каждом из трех положений, производится перенастройка электрического угла поворота на заданное значение, и выполняется измерение.
Заданное значение электрического угла поворота является одинаковым для всех трех угловых положений инерциального устройства. Значение фазового угла выбирается прежним для обеспечения минимальной погрешности.
При измерениях во всех положениях устанавливается одинаковое значение электрического угла поворота с помощью контроля прецессии (во время и/или после изменения положения инерциального устройства).
Сигналы, поступающие от вибрационного углового датчика 3, регистрируются, а затем определяется соответствующий уход датчика. Вычисление ухода вибрационного углового датчика осуществляется известным способом.
После выполнения измерений в первом положении инерциальное устройство устанавливают в следующее положение.
Затем производится регулировка электрического угла поворота вибрационного углового датчика 3 для получения такого же значения, как и при первом измерении.
Сигналы, поступающие от вибрационного углового датчика 3, регистрируются, а затем определяется соответствующий уход датчика.
Затем данную операцию повторяют для третьего углового положения датчика.
В подробно рассмотренном выше примере курс последовательно определяется путем определения зависимости результатов измерений угловой скорости от углового положения датчика (1, 2 и 3 положения).
Третье положение может также использоваться для устранения среднеквадратичной погрешности измерений, соответствующей смещению датчика.
Например, курс сначала определяют посредством измерения угловой скорости для каждого углового положения инерциального устройства, т.е., чтобы получить значения Угловая_скорость1, Угловая_скорость2 и Угловая_скорость3, когда датчик установлен соответственно в трех угловых положениях Угол1, Угол2 и Угол3 (вышеупомянутые три положения инерциального устройства 1).
Затем вычисляют следующую независимую переменную в уравнении регрессии:
Угловая_скорость i=A*cos(Угол i)+B*sin(Угол i)+C
для i=1, 2 и 3 (система трех уравнений с тремя неизвестными); где:
C - среднеквадратичная погрешность измерений, не зависящая от положения инерциального устройства, т.е., систематическая погрешность датчика, и она не принимается во внимание при расчете; и
A и B - параметры, используемые для определения курса путем вычисления арктангенса.
Естественно, настоящее изобретение не ограничивается описанными выше конкретными примерами осуществления; оно охватывает и все другие варианты в пределах сферы изобретения, определяемой приведенной формулой.
В частности, инерциальное устройство может иметь любое другое количество вибрационных угловых датчиков или акселерометров, но инерциальное устройство, тем не менее, должно иметь, как минимум, один вибрационный угловой датчик.
В качестве варианта, можно использовать два угловых положения, смещенных относительно друг друга на 180°, или четыре угловых положения, смещенных относительно друг друга на 90°, или большее число угловых положений.
Приводное устройство для перемещения подвижного капота реверса тяги
Устройство управления полетом для летательного аппарата
Датчик с электростатическим маятниковым акселерометром и способ управления таким датчиком
Способ нахождения охранного предела с компенсацией на задержки вычисления
Резонатор, в частности, для вибрационного гироскопа
Многослойная карточка из термопластического материала и способ выполнения защиты многослойной карточки
Схема активной амортизации для электрической схемы прерывателя
Приводное устройство для перемещения подвижного капота реверса тяги
Устройство управления полетом для летательного аппарата

