Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к устройству управления полетом для летательного аппарата.
Предшествующий уровень техники
Обычно устройства управления полетом для летательных аппаратов содержат рычаг управления, установленный с возможностью поворота на корпусе устройства управления вокруг по меньшей мере двух осей вращения, ортогональных относительно друг друга, чтобы управлять движениями крена и тангажа летательного аппарата.
Для этого рычаг управления связан механически или электрически с одним или несколькими органами пилотирования, такими как рули. Движения рычага управления передаются либо напрямую на указанные органы пилотирования, либо на органы управления указанными органами пилотирования, при этом движения рычага управления преобразуются в данные положений на осях крена и тангажа, и эти данные поступают на органы управления.
Для оказания содействия пилоту такое устройство управления полетом может также создавать возвратное усилие, когда пилот манипулирует рычагом. Как правило, возвратное усилие определяется порогом (то есть силой, которой действует пилот на рычаг и которая должна быть превышена, чтобы появилось возвратное усилие) и закономерностью усилия (характеризующей противодействующую силу, создаваемую для возвратного усилия в зависимости от наклона рычага управления, при этом противодействующая сила тем больше, чем больше наклонен рычаг управления).
Известны, например, пружинные системы (пассивные системы) и электромеханические системы (активные системы) создания возвратного усилия рычага управления.
Например, из документа FR 2954835 А известно устройство управления, содержащее два привода, связанные с рычагом управления, для имитации возвратного усилия при каждом движении поворота рычага управления относительно корпуса.
Однако эти приводы непосредственно встроены в корпус устройства управления, поэтому устройство является громоздким. Это является недостатком для летательных аппаратов с кабинами экипажа небольшого размера, таких как вертолеты, содержащие дверь кабины, или таких как бизнес-самолеты или самолеты региональных линий, так как установка устройства управления в кабине экипажа может оказаться затрудненной.
Раскрытие изобретения
Задачей изобретения является создание усовершенствованного устройства управления полетом, которое можно легко установить в кабине экипажа.
Задача решается тем, что устройство управления полетом летательного аппарата включает в себя рычаг управления, связанный с корпусом, поддерживающим:
- рамку, соединенную с корпусом посредством первого поворотного соединения вокруг первой оси, при этом рычаг управления соединен с рамкой посредством второго поворотного соединения вокруг второй оси, которая является, по существу, перпендикулярной и пересекающей первую ось,
- первый передаточный вал, установленный с возможностью поворота относительно корпуса вокруг третьей оси и соединенный, по меньшей мере, с первым приводным органом управления, вынесенным за пределы корпуса,
- первый механизм соединения рычага управления с первым передаточным валом таким образом, чтобы поворот рычага управления вокруг первой оси приводил к повороту первого вала вокруг третьей оси,
- второй передаточный вал, установленный с возможностью поворота относительно корпуса вокруг четвертой оси и соединенный, по меньшей мере, со вторым приводным органом управления, вынесенным за пределы корпуса, и
- второй механизм соединения рычага управления со вторым передаточным валом таким образом, чтобы поворот рычага управления вокруг второй оси приводил к вращению второго вала вокруг четвертой оси,
Первый вал и первый механизм соединения соединены друг с другом посредством поворотного соединения вокруг пятой оси, наклоненной относительно первой оси и третьей оси; и второй вал и второй механизм соединения соединены друг с другом посредством поворотного соединения вокруг шестой оси, наклоненной относительно второй оси и четвертой оси.
Таким образом, благодаря наклону между первым валом и первым механизмом соединения и между вторым валом и вторым механизмом соединения можно адаптировать положение третьей оси и четвертой оси относительно корпуса устройства управления. Соответственно, можно расположить передаточные валы в устройстве управления таким образом, чтобы устройство управления можно было легко разместить в кабине экипажа даже небольшого размера. В частности, приводные органы управления вынесены за пределы корпуса, и их положения относительно корпуса можно тоже адаптировать к данной кабине экипажа.
Кроме того, существует угловая передача между третьей осью и первой осью и между четвертой осью и второй осью, поэтому напрямую создается передаточное отношение между вращением первого передаточного вала вокруг третьей оси и поворотом рычага управления вокруг первой оси, и напрямую создается передаточное отношение между вращением второго передаточного вала вокруг четвертой оси и поворотом рычага управления вокруг второй оси. Кроме того, эти передаточные отношения можно выбирать посредством определения специальной геометрии механизмов соединения и/или передаточных валов для адаптации наклона пятой оси и шестой оси. Таким образом, можно отказаться от использования в устройстве специального редуктора.
В изобретении под «осью R, наклоненной относительно оси S», следует понимать, что ось R не является параллельной и не является перпендикулярной относительно оси S.
Краткое описание чертежей
Изобретение будет более понятно из последующего описания неограничивающих вариантов осуществления изобретения со ссылками на чертежи.
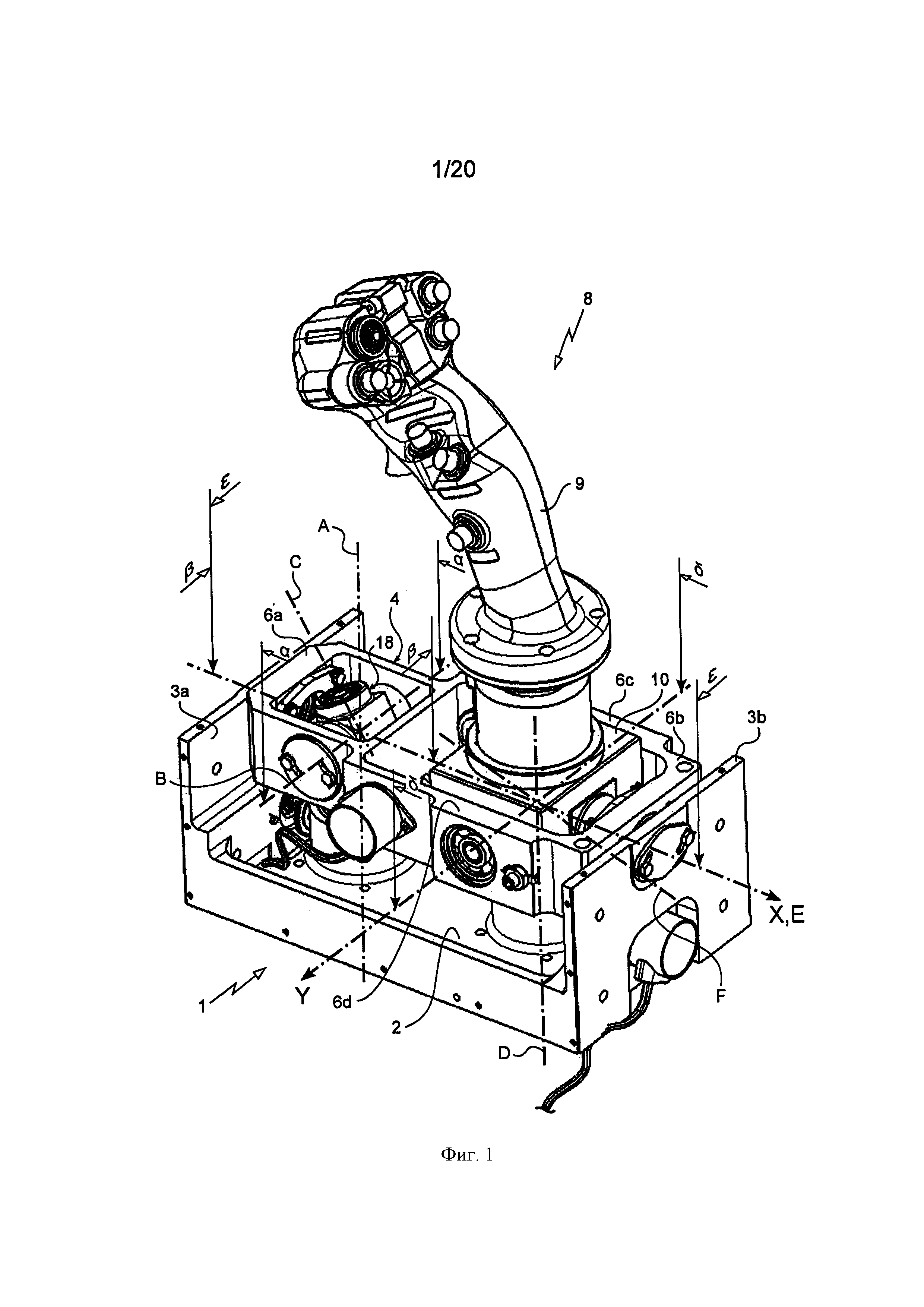
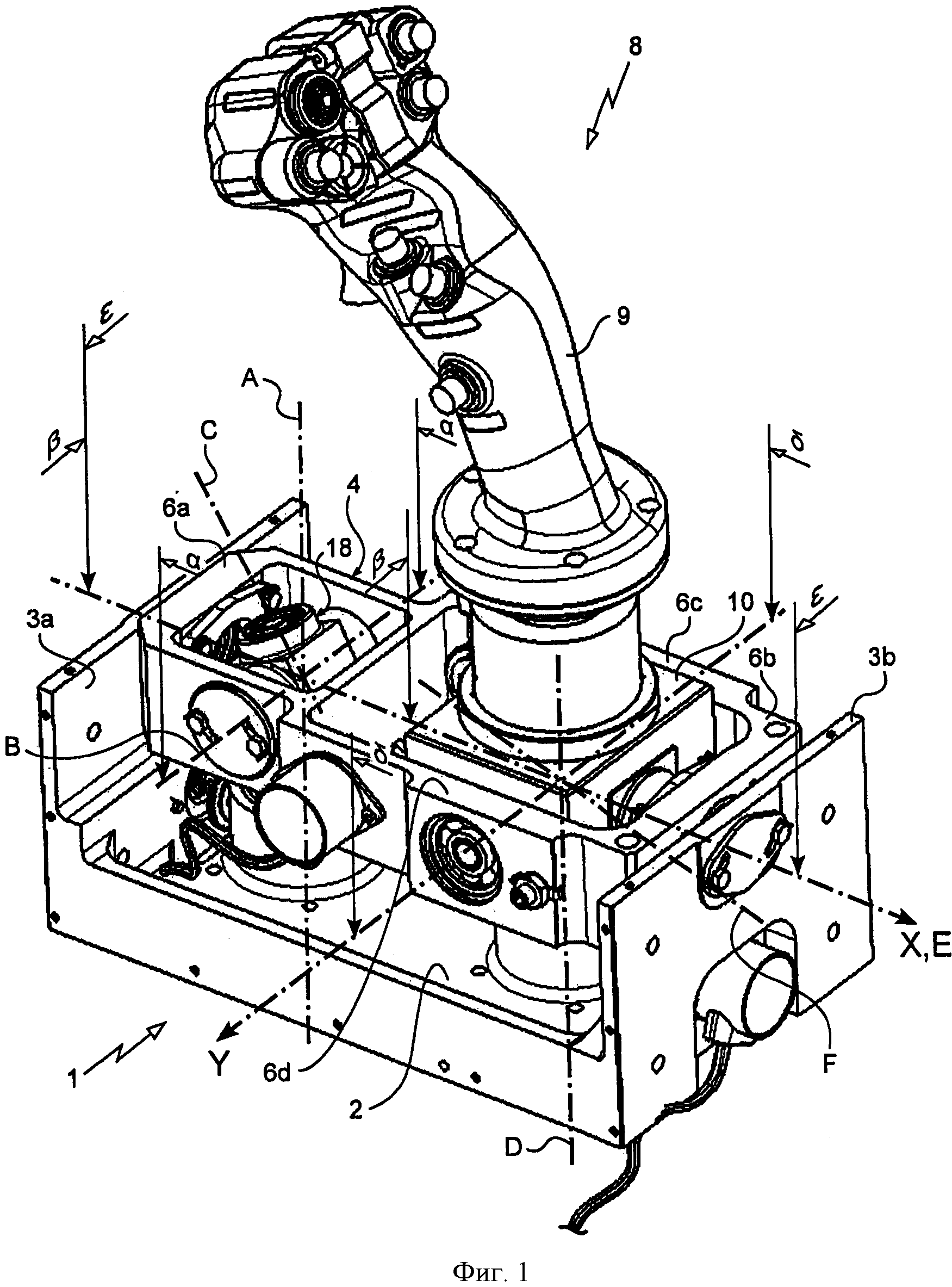
На фиг. 1 показано устройство управления полетом согласно первому варианту осуществления изобретения, вид в перспективе;
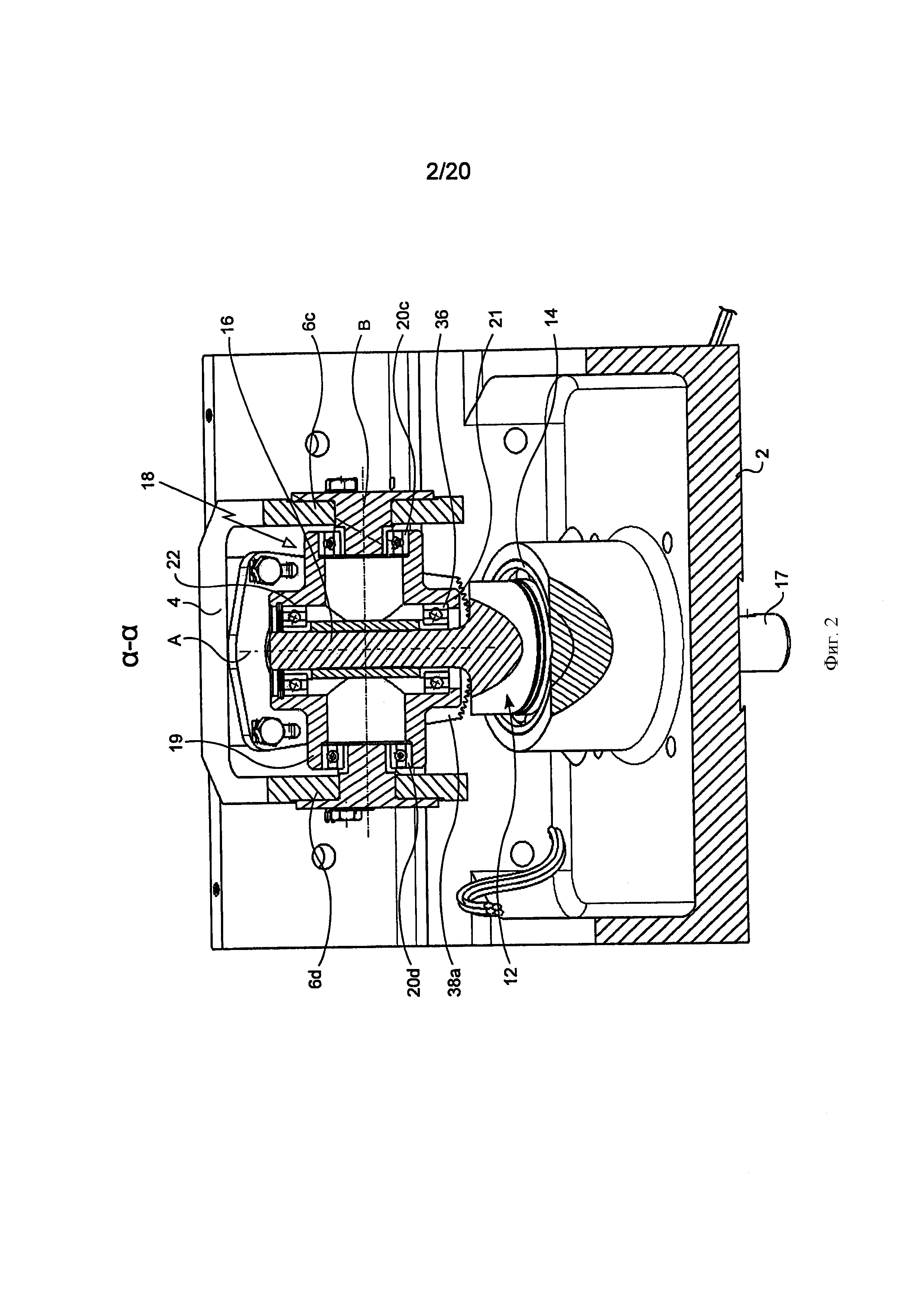
на фиг. 2 - устройство, показанное на фиг. 1, вид в разрезе по плоскости, содержащей оси В и С, показанные на фиг. 1;
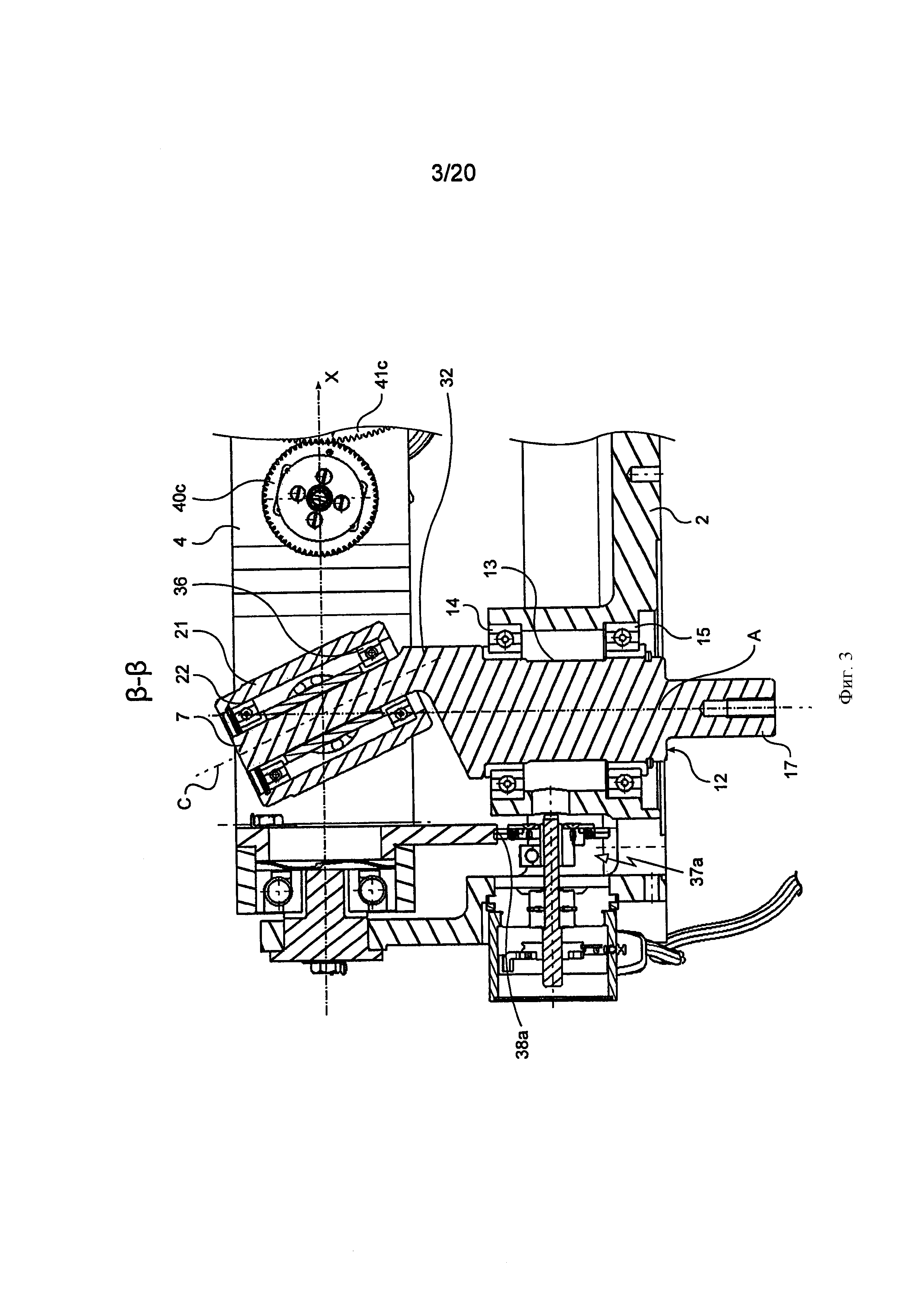
на фиг. 3 - устройство, показанное на фиг. 1, вид в частичном продольном разрезе по плоскости, содержащей оси X и А, показанные на фиг. 1;
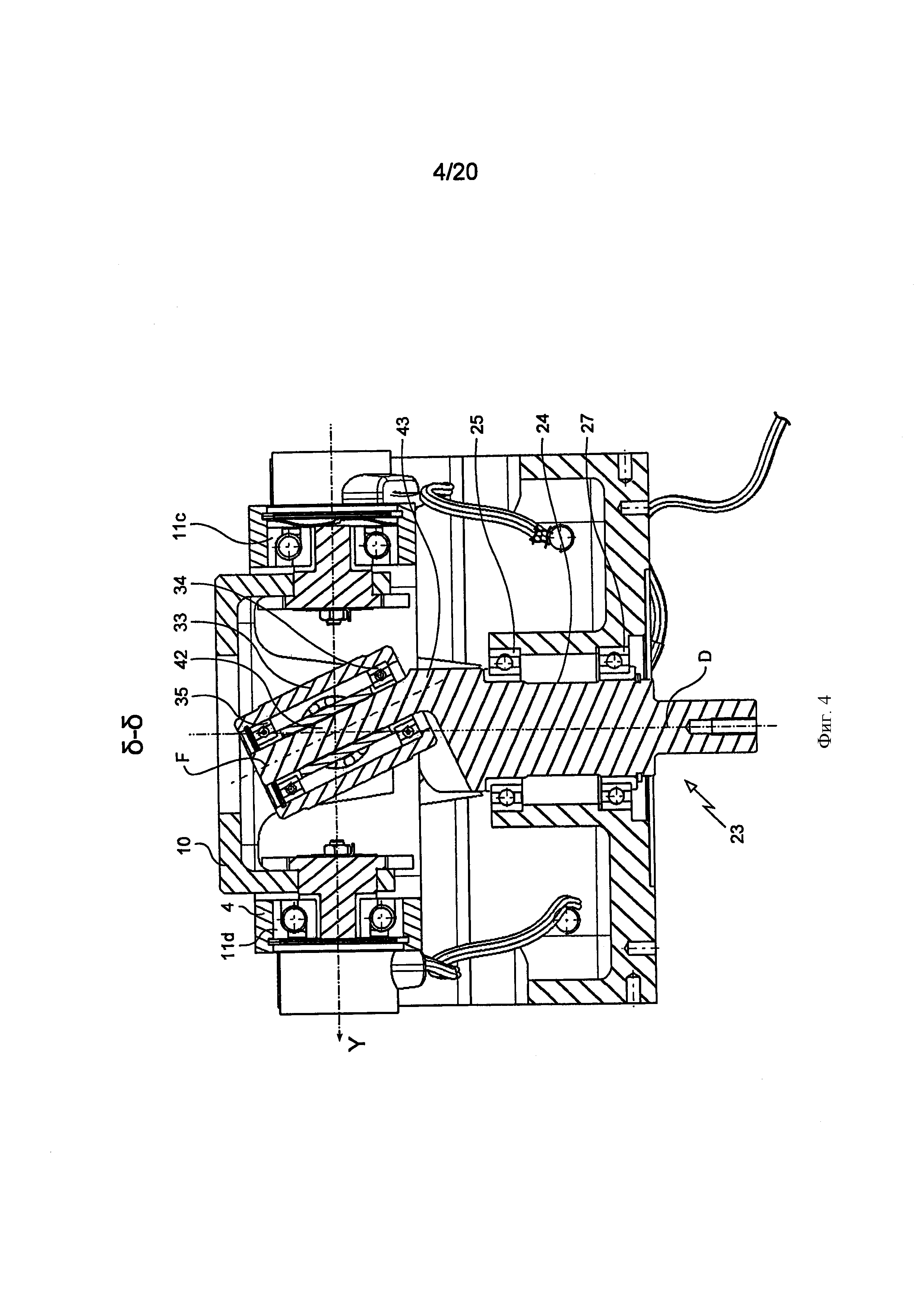
на фиг. 4 - устройство, показанное на фиг. 1, при этом ручка рычага управления устройства не показана, другой вид в поперечном разрезе по плоскости, содержащей оси Y и D, показанные на фиг. 1;
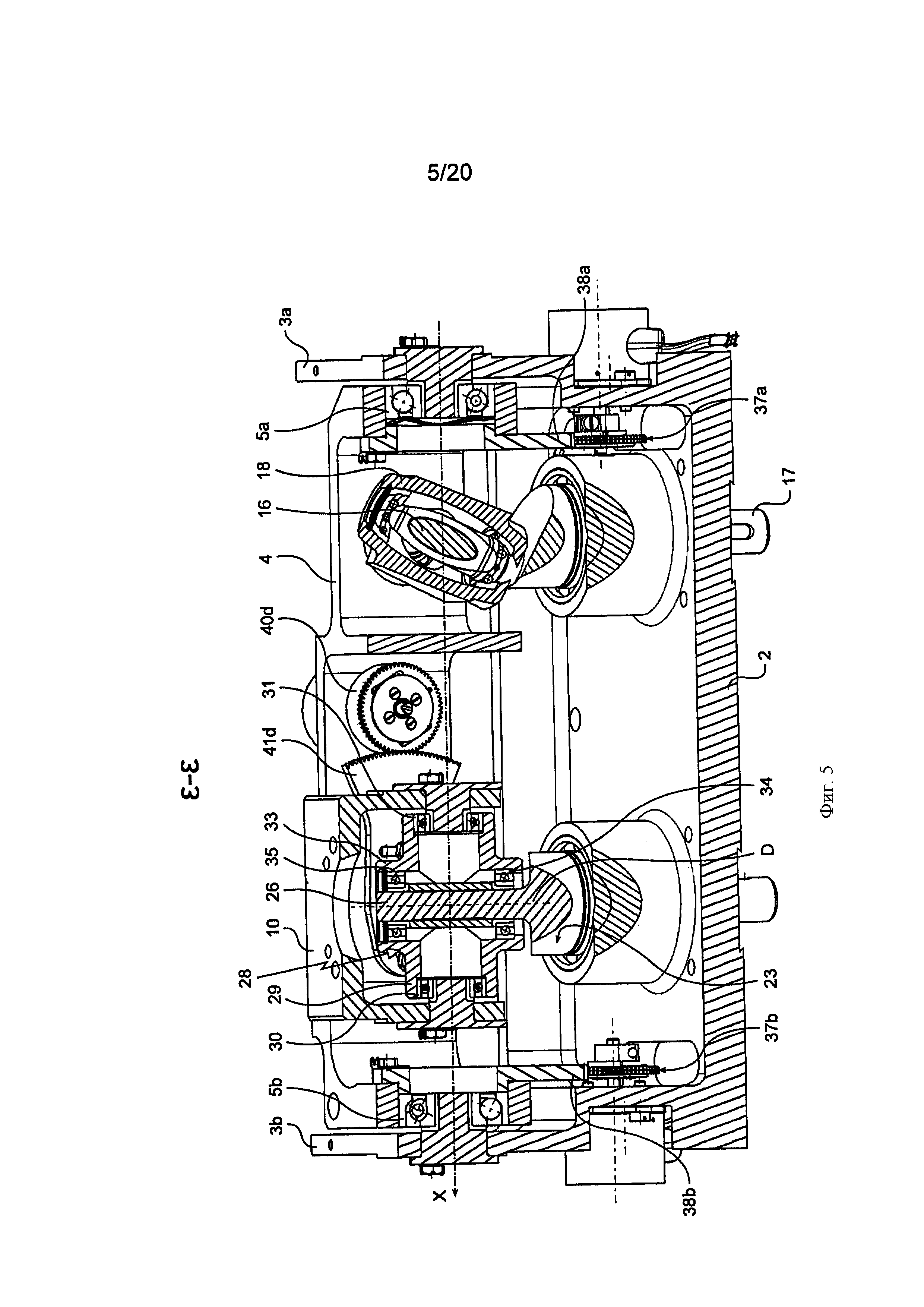
на фиг. 5 - устройство, показанное на фиг. 1, при этом ручка рычага управления устройства не показана, еще один вид в разрезе по плоскости, содержащей оси X и F, показанные на фиг. 1;
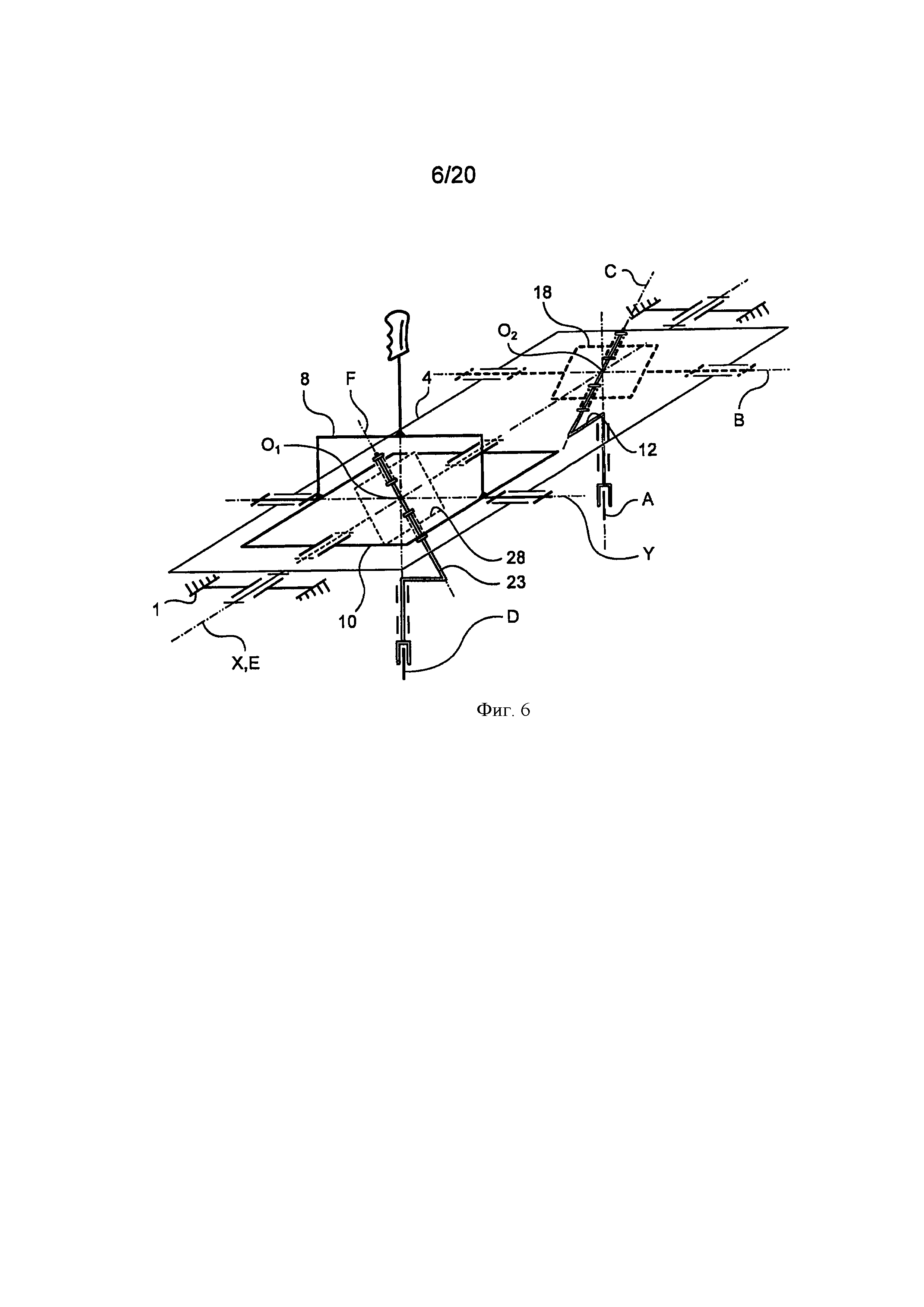
на фиг. 6 - кинематическая схема устройства управления полетом, показанного на фиг. 1;
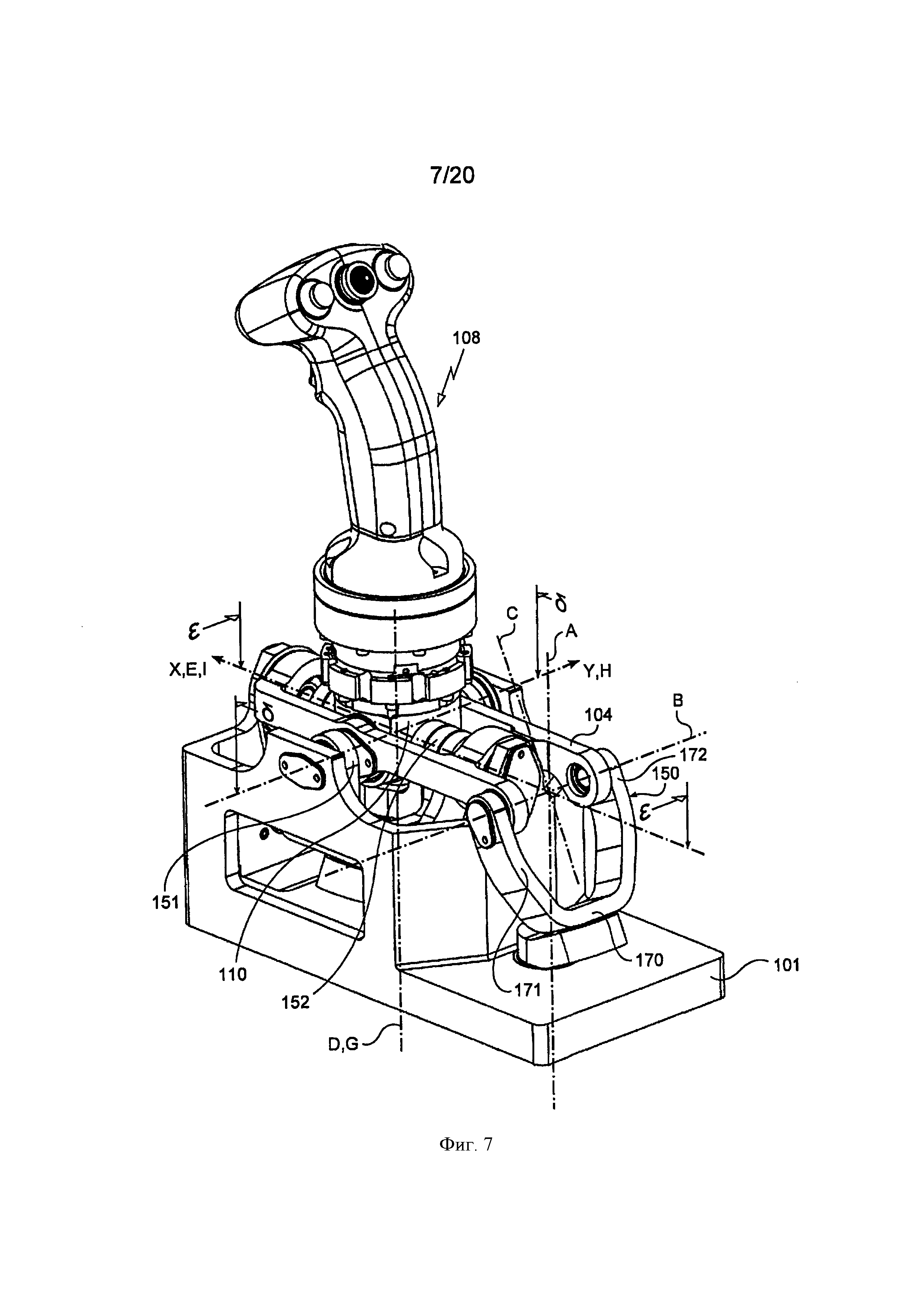
на фиг. 7 - устройство управления полетом согласно второму варианту осуществления изобретения, вид в перспективе;
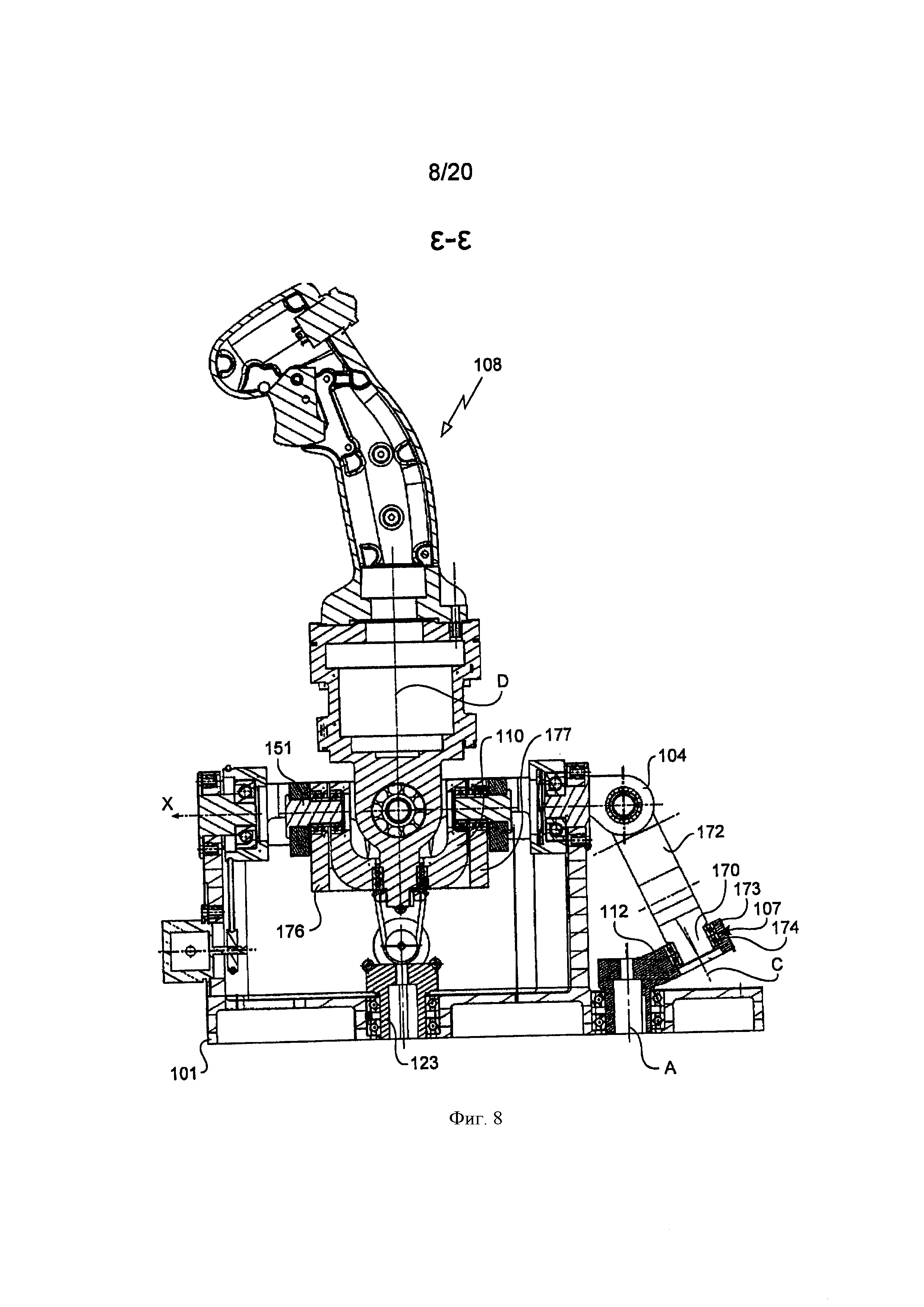
на фиг. 8 - устройство, показанное на фиг. 7, вид в продольном разрезе по плоскости, содержащей оси X и D, показанные на фиг. 7;
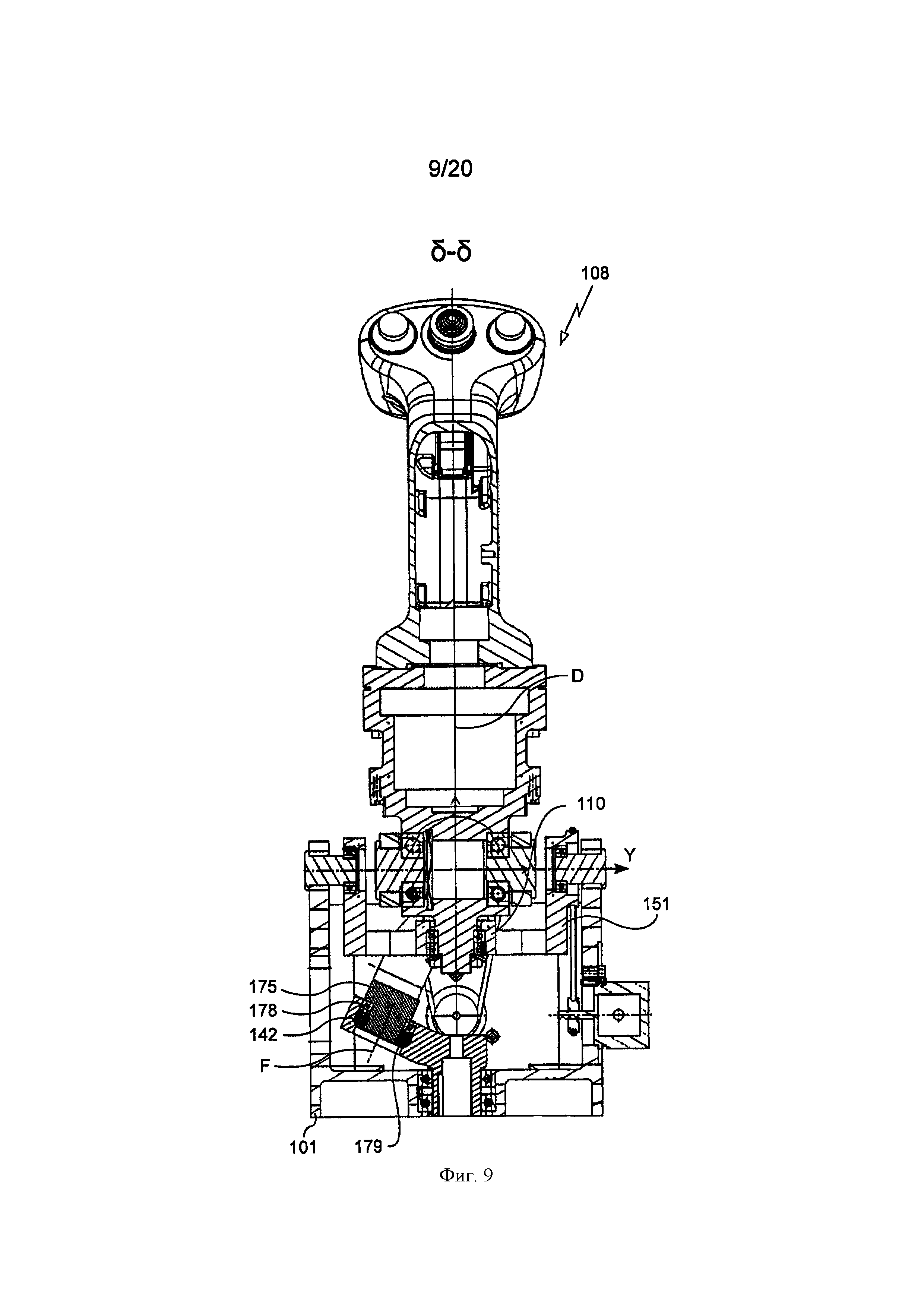
на фиг. 9 - устройство, показанное на фиг. 7, вид в поперечном разрезе по плоскости, содержащей оси D и Y, показанные на фиг. 7;
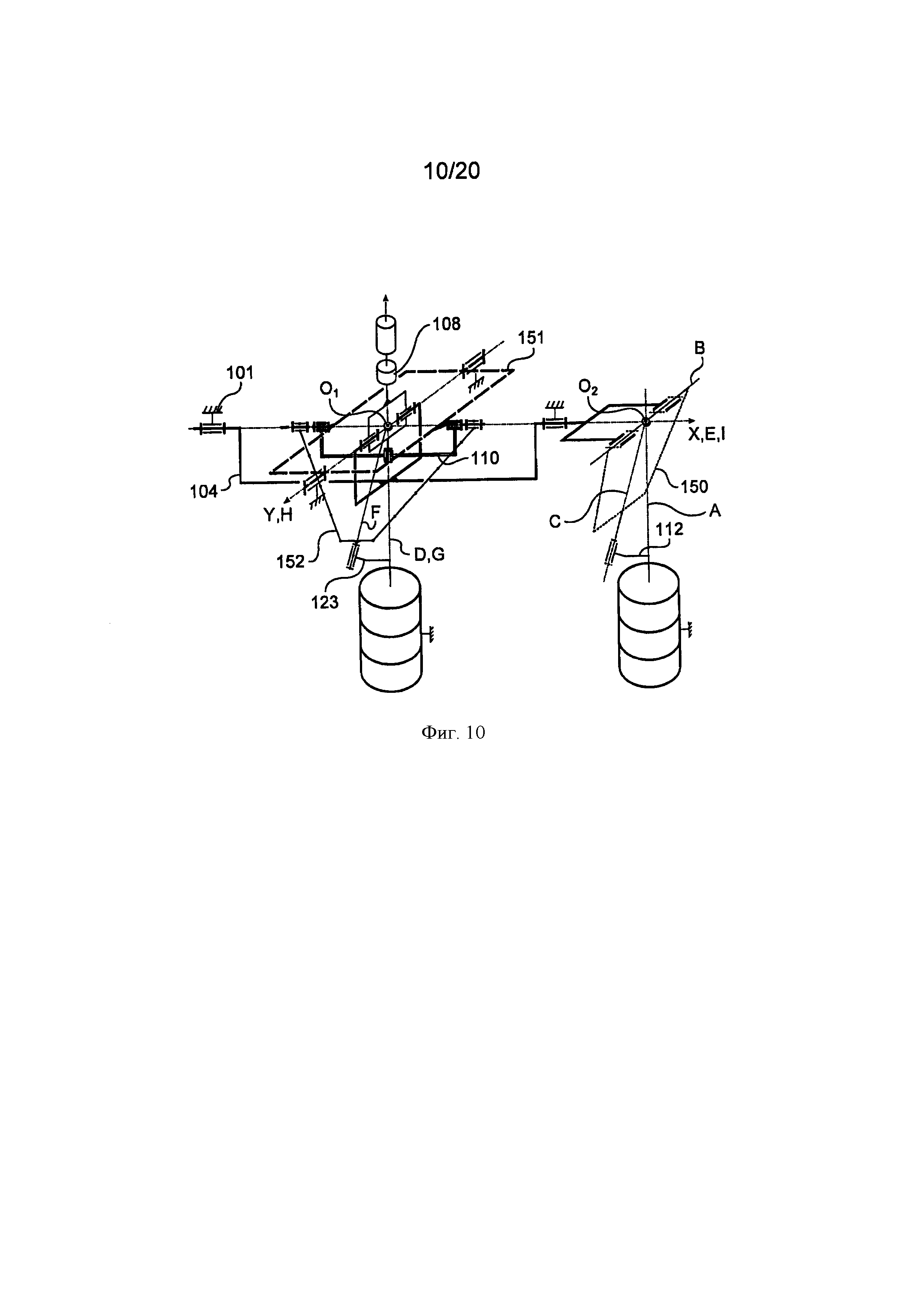
на фиг. 10 - схема устройства управления полетом, показанного на фиг. 7, на которой показаны также группы приводов, соединенные с передаточными валами;
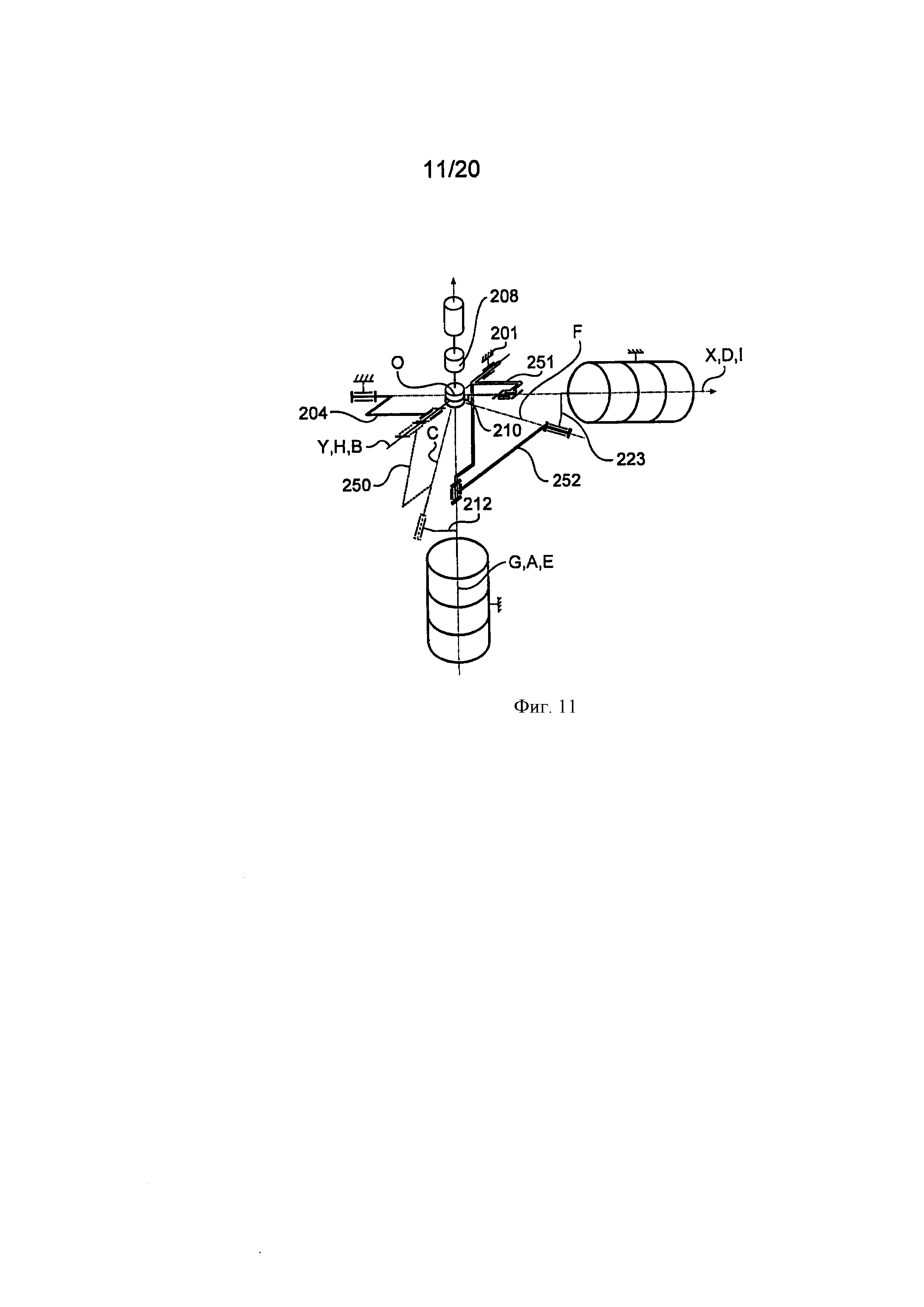
на фиг. 11 - схема устройства управления полетом согласно третьему варианту осуществления изобретения;
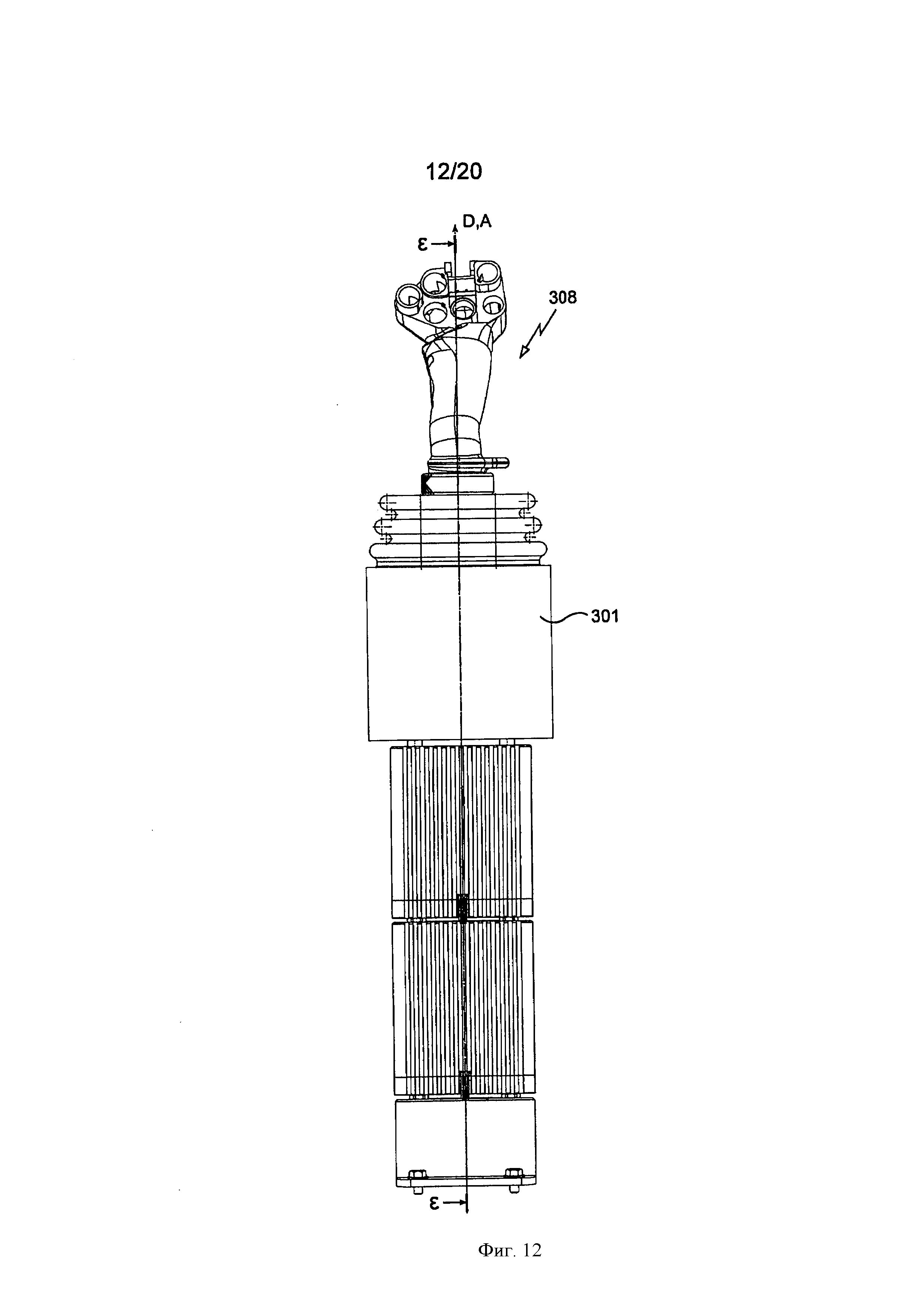
на фиг. 12 - устройство управления полетом согласно четвертому варианту осуществления изобретения, вид в перспективе;
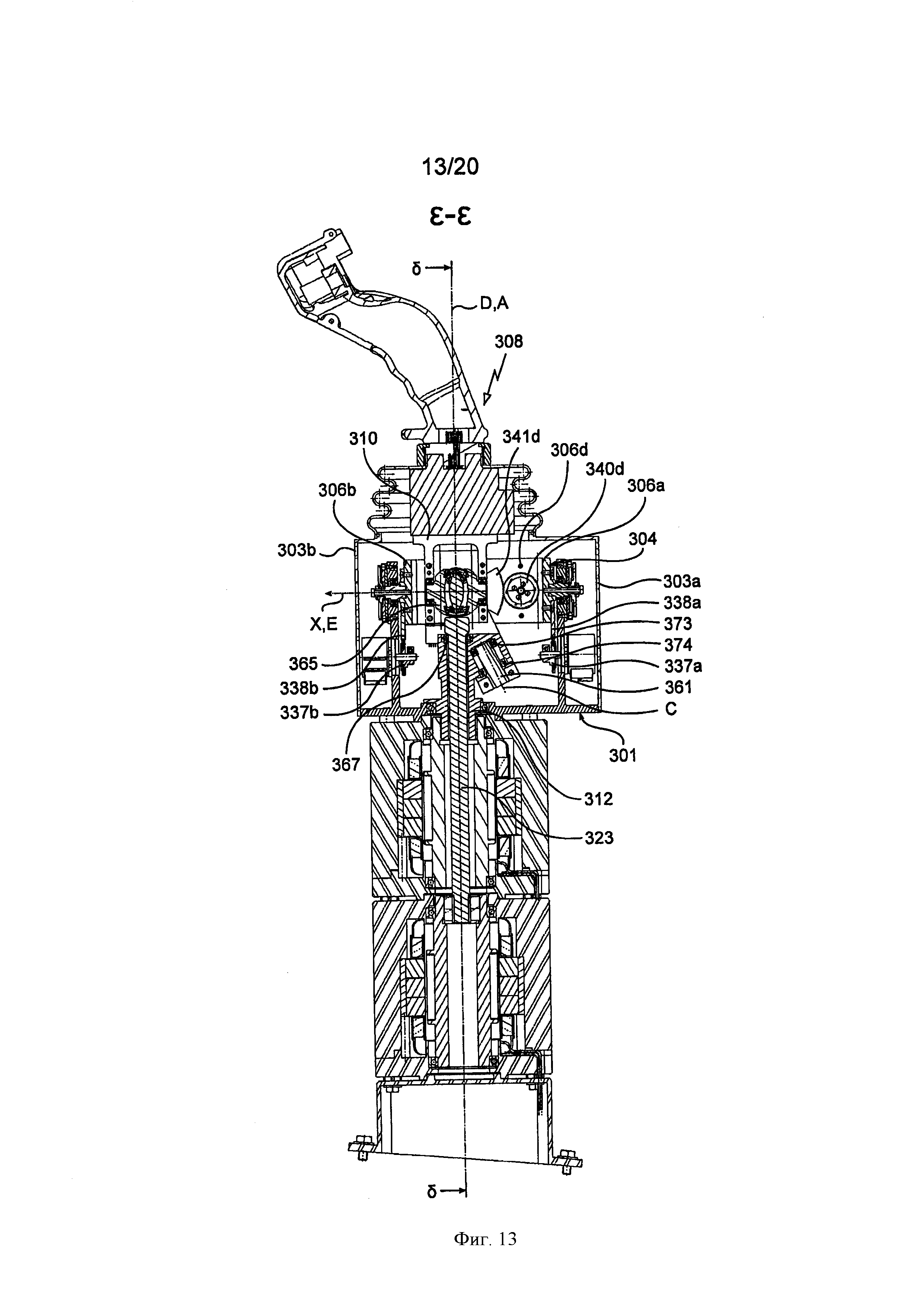
на фиг. 13 - устройство, показанное на фиг. 12, вид в продольном разрезе по плоскости, содержащей оси X и D, показанные на фиг. 12;
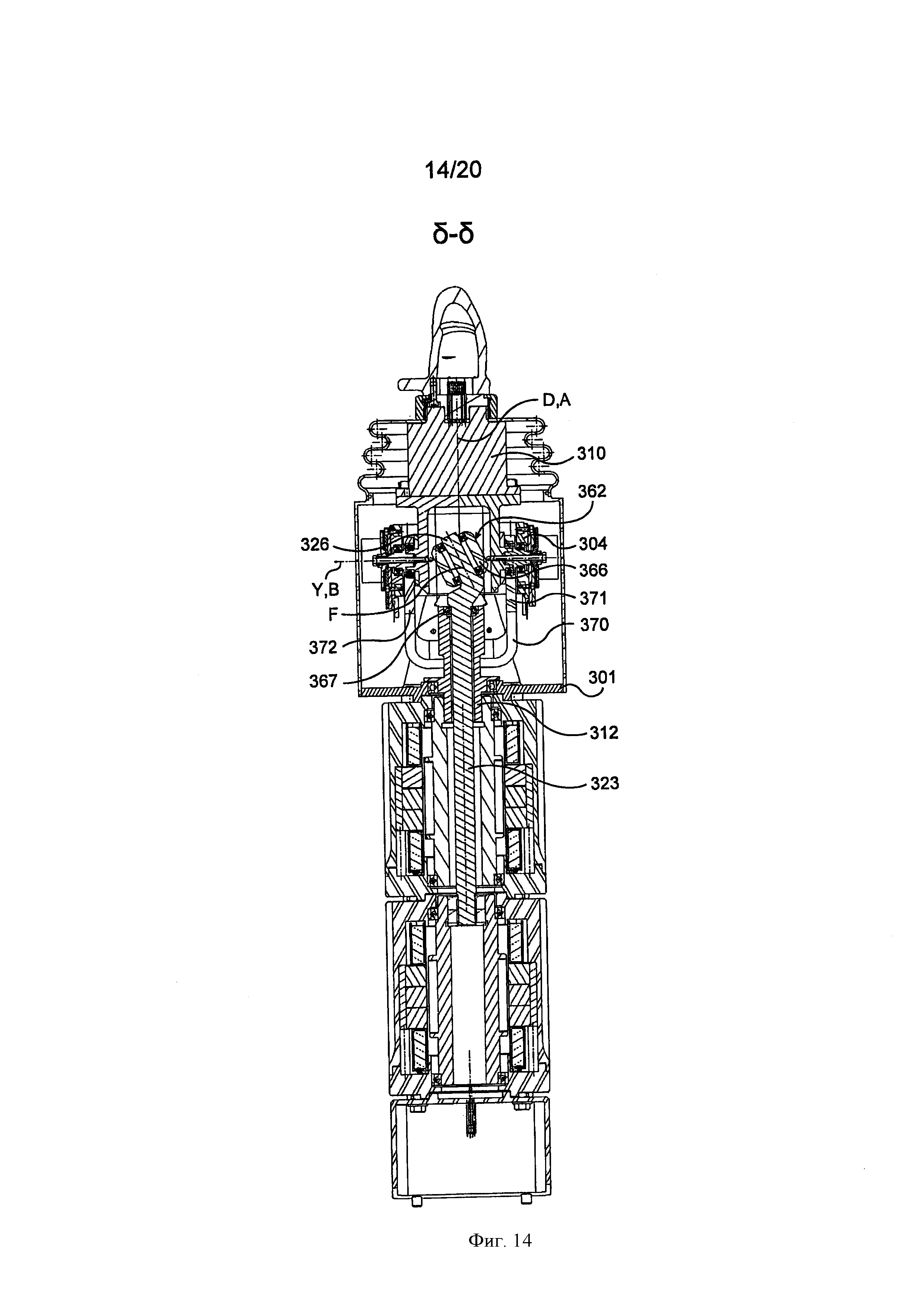
на фиг. 14 - устройство, показанное на фиг. 12, вид в поперечном разрезе по плоскости, содержащей оси Y и D, показанные на фиг. 12;
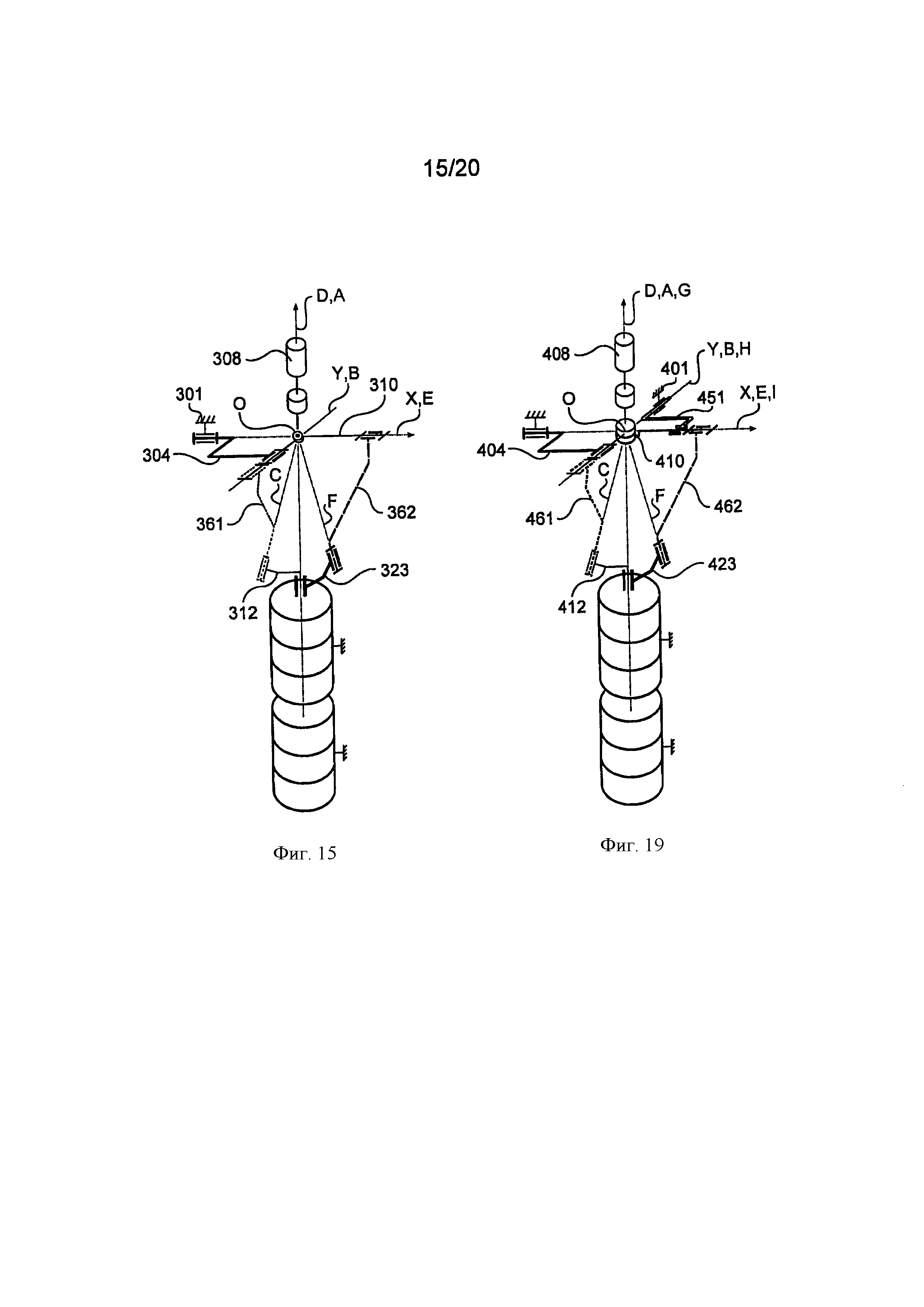
на фиг. 15 - схема устройства управления полетом, показанного на фиг. 12;
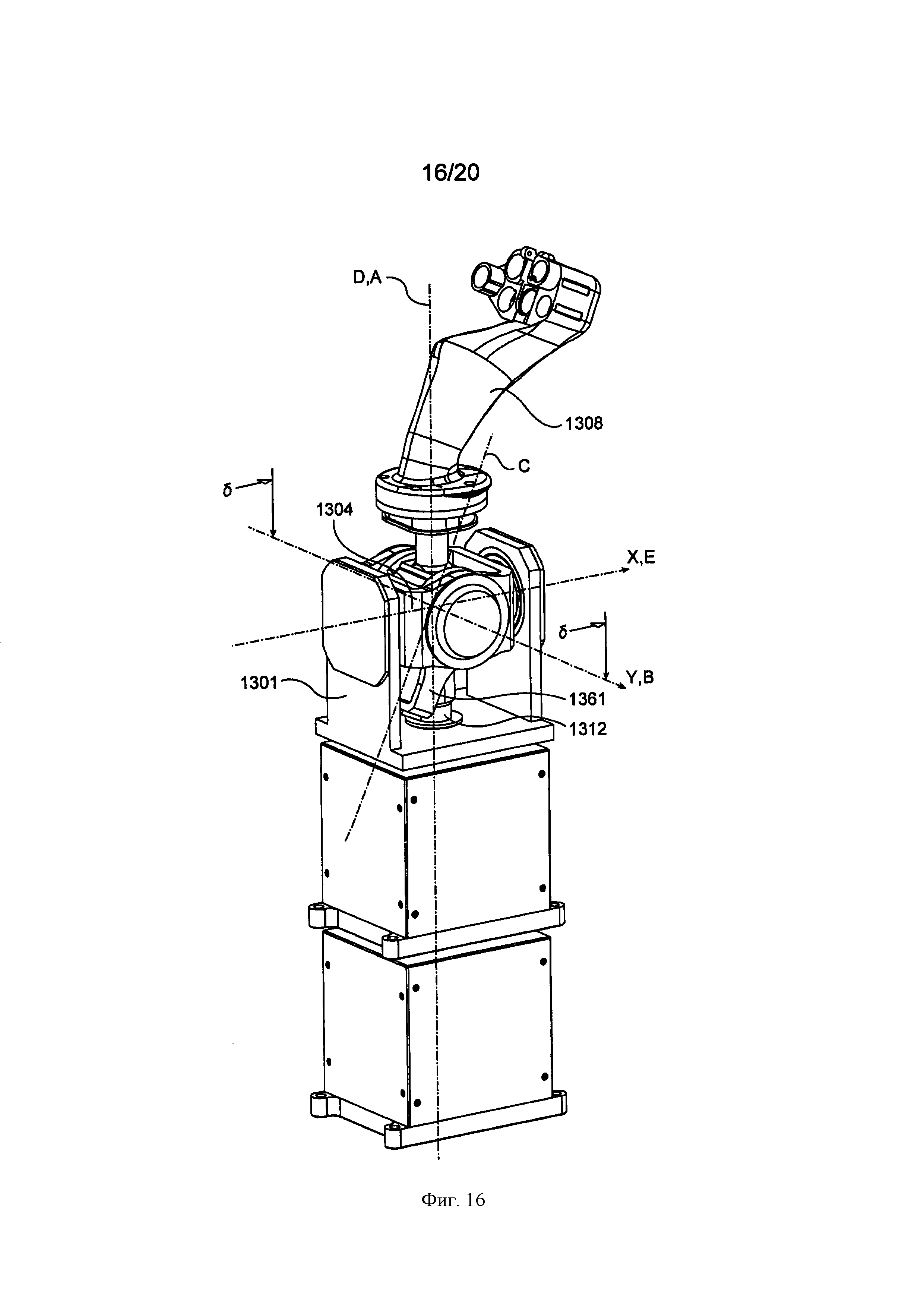
на фиг. 16 - вариант устройства управления полетом согласно четвертому варианту осуществления изобретения, вид в перспективе;
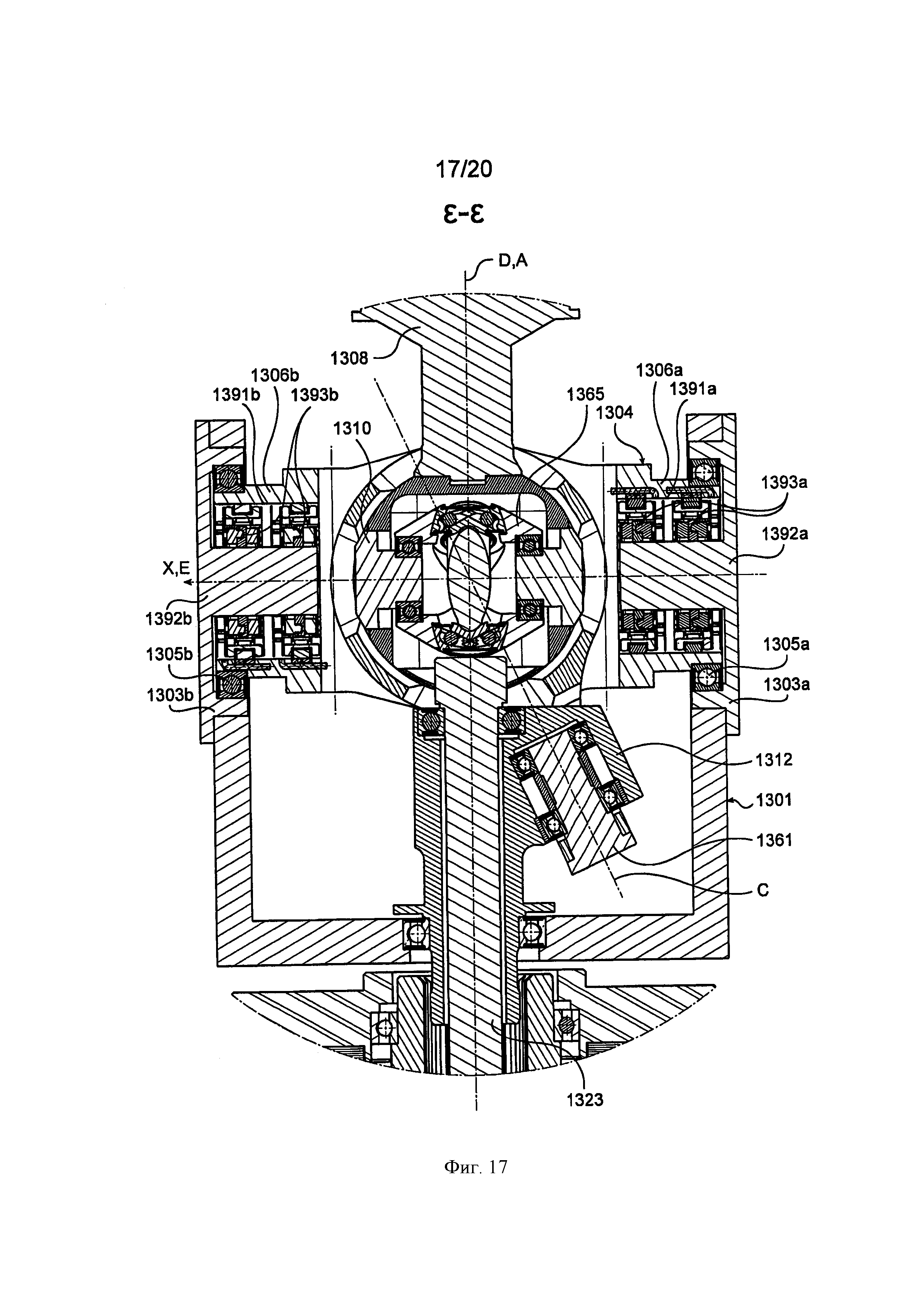
на фиг. 17 - устройство, показанное на фиг. 16, вид в частичном продольном разрезе по плоскости, содержащей оси X и D, показанные на фиг. 16;
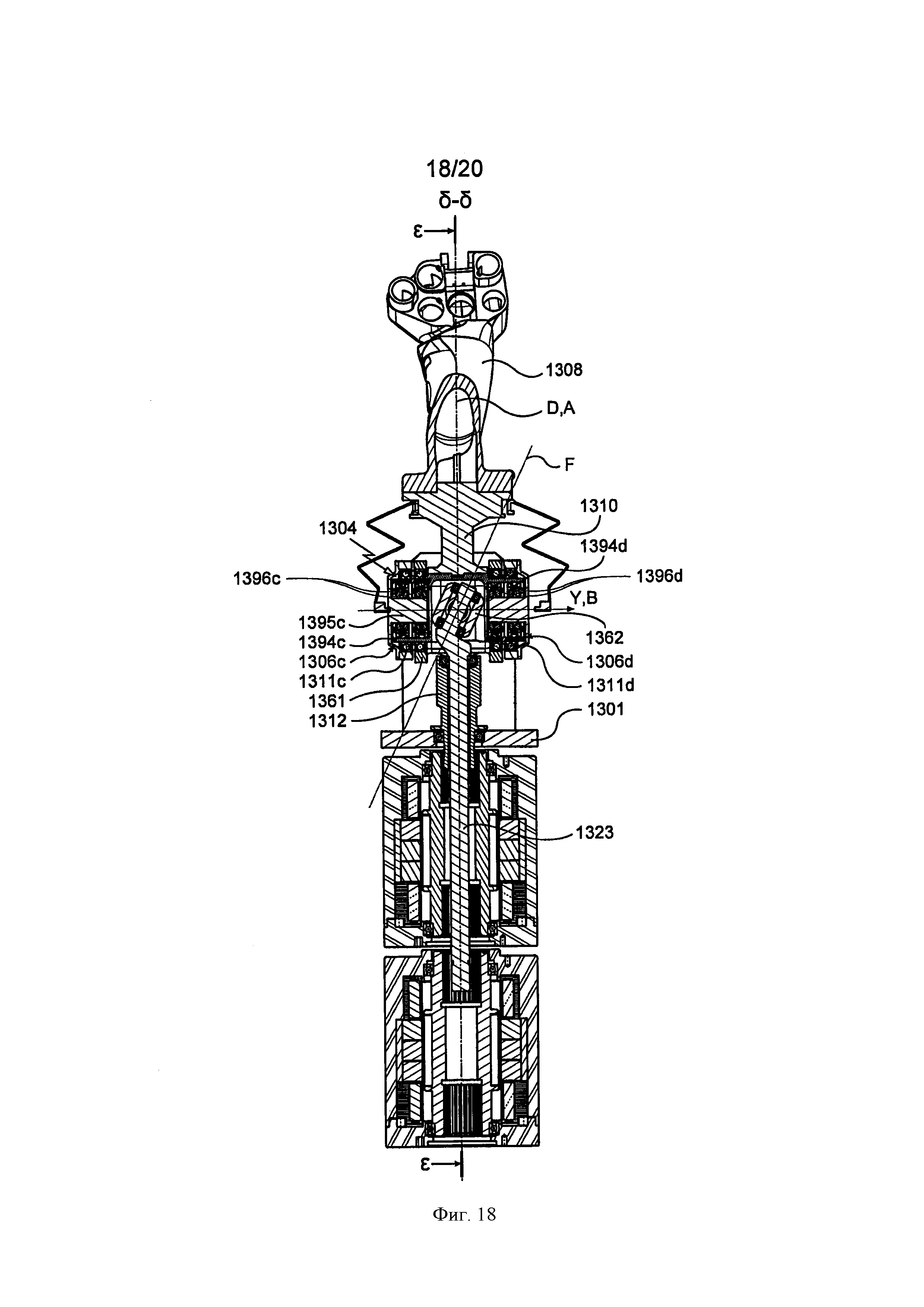
на фиг. 18 - устройство, показанное на фиг. 16, вид в поперечном разрезе по плоскости, содержащей оси Y и D, показанные на фиг. 16;
на фиг. 19 - схема устройства управления полетом согласно пятому варианту осуществления изобретения;
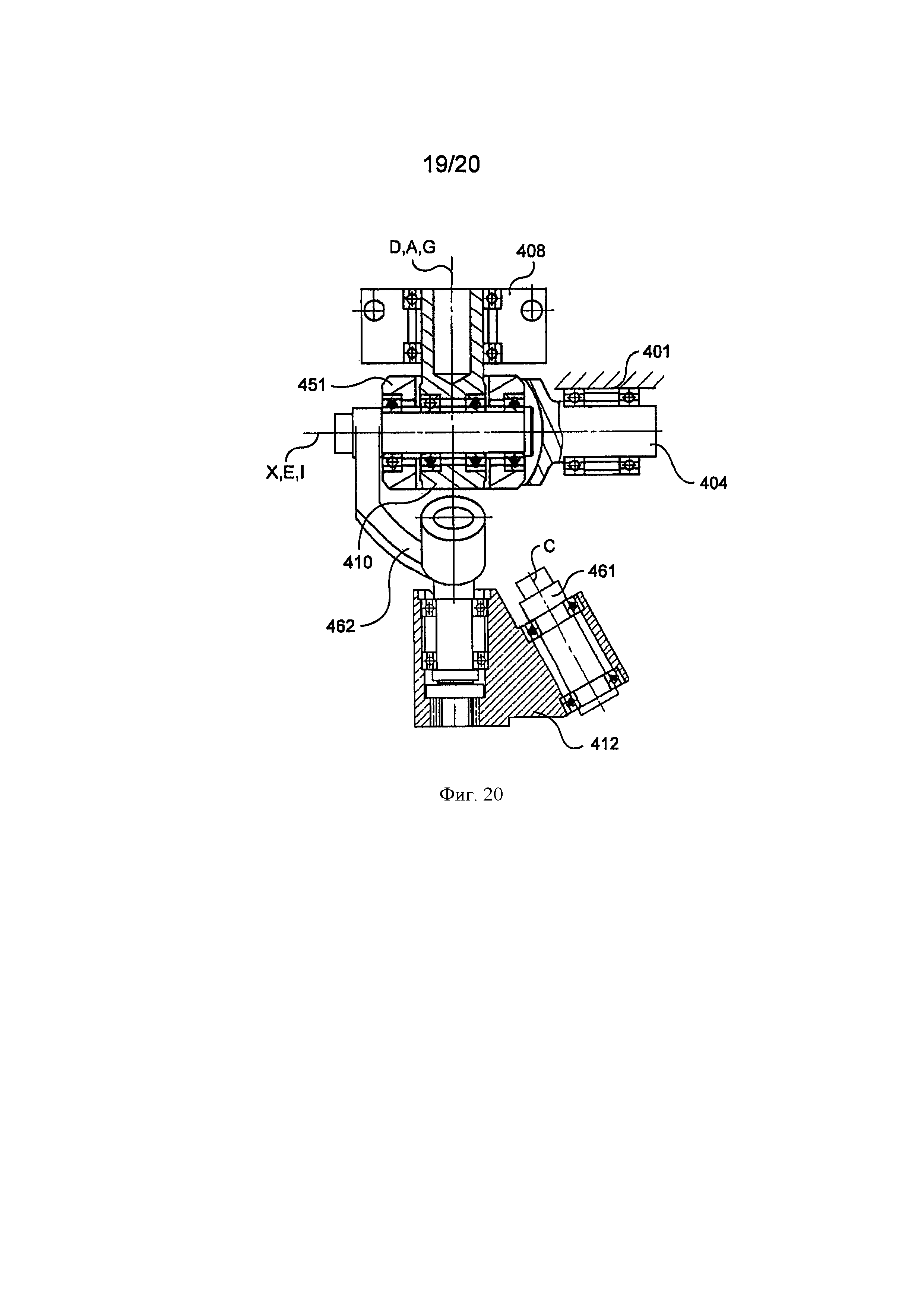
на фиг. 20 - устройство, показанное на фиг. 19, вид в частичном продольном разрезе по плоскости, содержащей оси X и D, показанные на фиг. 19; и
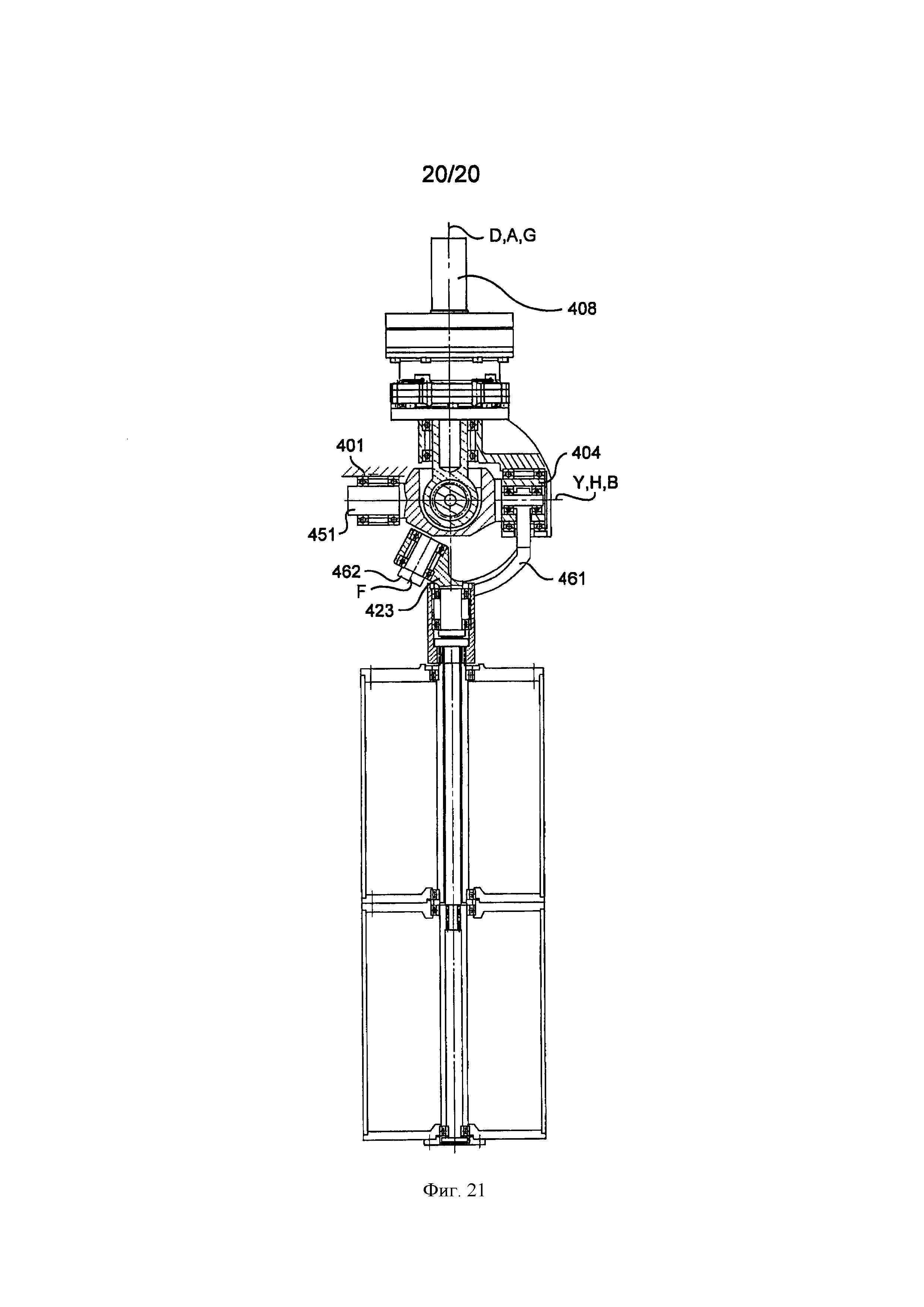
на фиг. 21 - устройство, показанное на фиг. 19, вид в поперечном разрезе по плоскости, содержащей оси Y и D, показанные на фиг. 19.
Варианты осуществления изобретения
Как показано на фиг. 1-6, устройство управления полетом согласно первому варианту осуществления изобретения содержит корпус 1. В частности, корпус 1 расположен продольно и содержит днище 2 и две боковые стенки, переднюю 3а и заднюю 3b, противоположные друг другу и расположенные вертикально по отношению к днищу 2.
Кроме того, устройство содержит первую рамку 4, которая в данном случае имеет общую форму вытянутой рамы, имеющей, по существу, такую же длину, что и корпус 1. Первая рамка 4 напрямую связана с корпусом 1 через первое поворотное соединение с первой осью X вращения. Для этого первая рамка 4 установлена на корпусе 1 посредством двух коаксиальных подшипников 5а, 5b качения, установленных соответственно на противоположных боковых стенках 3а, 3b корпуса 1. Таким образом, первая рамка 4 содержит две боковые стенки 6а, 6b, параллельные боковым стенками 3а, 3b корпуса 1, и две продольные стенки 6с, 6d, проходящие между боковыми стенками 6а, 6b первой рамки 4.
Устройство содержит также рычаг 8 управления, который соединен с корпусом 1 и содержит ручку 9, образующую свободный конец рычага управления, и вторую рамку 10, в данном случае выполненную за одно целое с ручкой 9.
Рычаг 8 управления напрямую связан с первой рамкой 4 посредством второго поворотного соединения со второй осью Y вращения, при этом вторая ось Y является перпендикулярной к первой оси X и пересекающей ее. Для этого вторая рамка 10 рычага 8 управления установлена на первой рамке 4 через два коаксиальных подшипника 11с, 11d качения, неподвижно соединенных соответственно с противоположными продольными стенками 6с, 6d первой рамки 4. Следует отметить, что вторая ось Y связана с первой рамкой 4, то есть поворот первой рамки 4 вокруг первой оси X приводит к повороту второй оси Y вокруг первой оси X.
Устройство содержит первый передаточный вал 12, напрямую связанный с корпусом 1 через третье поворотное соединение с третьей осью А вращения. Для этого первый передаточный вал 12 частично проходит внутри отверстия 13 в днище 2 корпуса 1 и установлен с возможностью вращения в отверстии 13 посредством двух коаксиальных подшипников 14, 15 качения.
Первый передаточный вал 12 расположен таким образом, что третья ось А пересекает первую ось X. Кроме того, первый передаточный вал 12 расположен таким образом, что третья ось А является нормальной к плоскости, содержащей первую ось X и вторую ось Y, когда рычаг 8 управления находится в нейтральном положении (то есть когда плоскость, содержащая первую ось X и вторую ось Y, расположена параллельно днищу 2).
Первый вал 12 содержит первый конец 16. Первый конец 16 содержит первую прямолинейную концевую часть 7 и изогнутую часть 32 соединения прямолинейной концевой части 7 со вторым концом 32 второго вала. Таким образом, прямолинейная концевая часть 7 первого конца 16 расположена с наклоном относительно третьей оси А и второго конца 17 второго передаточного вала 12.
Второй конец 17 первого вала 12 соединен с первой группой приводов (не показана), которая вынесена за пределы корпуса. В частности, первая группа приводов включает в себя три электрических двигателя, которые содержат общий статор, общий выходной вал, но отдельный ротор. Таким образом, ротор каждого двигателя установлен на общем выходном валу, поэтому каждый двигатель может индивидуально приводить во вращение общий выходной вал. Второй конец 17 первого передаточного вала содержит, например, внутренние шлицы, которые взаимодействуют с соответствующими шлицами первого выходного вала двигателя. Таким образом, первый передаточный вал 12 соединен с выходным валом первой группы приводов.
Кроме того, устройство содержит механизм соединения рычага управления с первым передаточным валом 12 таким образом, чтобы поворот рычага 8 управления вокруг первой оси X приводил к вращению первого передаточного вала 12 вокруг третьей оси А.
Предпочтительно первый механизм соединения содержит в данном случае первую крестовину 18, содержащую две перпендикулярные между собой ветви.
В частности, первый механизм соединения напрямую связан с первой рамкой 4 посредством четвертого поворотного соединения с четвертой осью В вращения. Для этого первый конец первой ветви 19 первой крестовины 18 установлен на одной из продольных стенок 6d первой рамки 4 посредством первого подшипника 20d, неподвижно соединенного с указанной первой продольной стенкой 6d, и второй конец первой ветви 19 первой крестовины 18 установлен на другой продольной стенке 6с первой рамки 4 посредством второго подшипника 20с, неподвижно соединенного с указанной продольной стенкой 6с, при этом первый подшипник 20d и второй подшипник 20с являются коаксиальными. Таким образом, первая ветвь 19 проходит поперечно в первой рамке 4 между двумя продольными стенками 6с, 6d первой рамки 4.
Первая крестовина 18 расположена таким образом, что четвертая ось В пересекается с первой осью X и с третьей осью А и проходит параллельно второй оси Y.
Вторая ветвь 21 первой крестовины 18 имеет центральное отверстие, проходящее по всей длине второй ветви 21. Первый передаточный вал 12 напрямую связан с первой крестовиной 18 через пятое поворотное соединение с пятой осью С вращения. Для этого прямолинейная концевая часть 7 первого передаточного вала 12 проходит внутри второй ветви 21 и установлена с возможностью вращения в центральном отверстии второй ветви 21 посредством двух коаксиальных подшипников 22, 36 качения.
Согласно изобретению устройство выполнено таким образом, что пятая ось С имеет наклон относительно первой оси X и третьей оси А и пересекает первую ось X, вторую ось Y и третью ось А. Первый передаточный вал 12 выполнен таким образом, что прямолинейная концевая часть 7 расположена под углом 25 градусов относительно второго конца 17 первого передаточного вала 12, при этом пятая ось С расположена под углом 25 градусов к третьей оси А.
За счет специальной изогнутой формы первого передаточного вала 12 можно обеспечить поворотное соединение между первым валом 12 и первым механизмом соединения, который имеет ось, наклоненную, в частности, относительно первой оси X и третьей оси А.
Таким образом, передача момента между рычагом 8 управления и первым передаточным валом 12 происходит через первую рамку 4 и первую крестовину 18. Когда пилот перемещает рычаг 8 управления вокруг первой оси X вращения, первая рамка 4 тоже начинает поворачиваться относительно корпуса 1 вокруг первой оси X вращения, что, благодаря связи, образованной первой крестовиной 18, приводит к вращению первого передаточного вала 12 вокруг третьей оси А.
Устройство содержит второй передаточный вал 23, напрямую связанный с корпусом 1 через шестое поворотное соединение с шестой осью D вращения. Для этого второй передаточный вал 23 частично проходит внутри отверстия 24 днища 2 корпуса 1 и установлен с возможностью вращения в отверстии 24 посредством двух коаксиальных подшипников 25, 27 качения.
Второй передаточный вал 23 расположен таким образом, что шестая ось D пересекает первую ось X и вторую ось Y. Кроме того, второй передаточный вал 23 расположен таким образом, что шестая ось D является нормальной к плоскости, содержащей первую ось X и вторую ось Y, когда рычаг 8 управления находится в нейтральном положении (то есть когда плоскость, содержащая первую ось X и вторую ось Y, расположена параллельно днищу 2).
Таким образом, шестая ось D является параллельной третьей оси А, поэтому первый передаточный вал 12 и второй передаточный вал 23 расположены параллельно друг другу.
Согласно изобретению второй вал 23 содержит первый конец 26. Первый конец 26 содержит прямолинейную концевую часть 42 и изогнутую часть 43 соединения прямолинейной концевой части 42 со вторым концом 26 второго вала 23. Таким образом, прямолинейная концевая часть 42 первого конца 26 расположена с наклоном относительно шестой оси D и второго конца 26.
Второй конец 26 второго вала 23 соединен со второй группой приводов (не показана), которая вынесена за пределы корпуса. Второй вал 23 соединен со второй группой приводов, например, так же, как первый вал 12 соединен с первой группой приводов. В данном случае вторая группа приводов идентична первой группе приводов.
Поскольку третья ось А и шестая ось D являются параллельными и выходные валы первой группы приводов и второй группы приводов являются соответственно коаксиальными с третьей осью А и с шестой осью D, выходные валы первой группы приводов и второй группы приводов тоже являются параллельными между собой.
Группы приводов вынесены и расположены таким образом, что находятся под днищем корпуса 1 рядом друг с другом.
Таким образом, устройство согласно первому варианту осуществления является компактным.
Устройство содержит также второй механизм соединения рычага 8 управления с вторым передаточным валом 23, поэтому поворот рычага 8 управления вокруг второй оси Y приводит к вращению второго передаточного вала 23 вокруг шестой оси D.
Предпочтительно второй механизм соединения содержит вторую крестовину 28, имеющую две расположенные перпендикулярно друг к другу ветви.
В частности, второй механизм соединения напрямую связан со второй рамкой 10 через седьмое поворотное соединение с седьмой осью Е вращения, которая в данном случае совпадает с первой осью X вращения. Для этого первый конец первой ветви 29 второй крестовины 28 установлен на одной из боковых стенок второй рамки 10 через первый подшипник 29, и второй конец первой ветви 29 второй крестовины 28 установлен на другой боковой стенке второй рамки 10 через второй подшипник 31, при этом первый подшипник 30 и второй подшипник 31 являются коаксиальными. Таким образом, первая ветвь 29 первой крестовины 28 проходит в продольном направлении во второй рамке 10 между двумя боковыми стенками второй рамки 10.
Вторая ветвь 33 второй крестовины 28 имеет центральное отверстие, проходящее по всей длине второй ветви 33. Второй передаточный вал 23 напрямую связан со второй крестовиной 28 через восьмое поворотное соединение с восьмой осью F вращения. Для этого первый изогнутый конец 26 второго передаточного вала 23 проходит внутри второй ветви 33 и установлен с возможностью вращения в центральном отверстии второй ветви 33 посредством двух коаксиальных подшипников 34, 35.
Согласно изобретению устройство выполнено таким образом, что восьмая ось F имеет наклон относительно второй оси Y и шестой оси D и пересекает первую ось X, вторую ось Y и шестую ось D. Второй передаточный вал 23 выполнен таким образом, что первый изогнутый конец 26 расположен под углом 25 градусов ко второму передаточному валу 23, при этом восьмая ось F расположена под углом 25 градусов относительно шестой оси D.
Благодаря специальной изогнутой форме второго передаточного вала 23 можно обеспечить поворотное соединение между вторым валом 23 и вторым механизмом соединения, который имеет ось, наклоненную, в частности, относительно второй оси Y и шестой оси D.
Таким образом, передача момента между рычагом 8 управления и вторым передаточным валом 23 происходит только через вторую крестовину 28. Когда пилот перемещает рычаг 8 управления вокруг второй оси Y вращения, это приводит, благодаря связи, образованной второй крестовиной 28, к вращению второго передаточного вала 23 вокруг шестой оси D.
Таким образом, устройство согласно первому варианту осуществления изобретения содержит только восемь поворотных соединений и шесть основных элементов (первый передаточный вал 12, второй передаточный вал 23, первую крестовину 18, вторую крестовину 28, первую рамку 4 и рычаг 8 управления), позволяя при этом связать группу приводов с каждым движением поворота рычага 8 управления относительно корпуса 1. Таким образом, устройство согласно первому варианту осуществления изобретения имеет упрощенную конструкцию.
Кроме того, различные элементы устройства связаны друг с другом только через подшипники. Это позволяет упростить устройство и сделать ее более надежным. Действительно, это позволяет отказаться от зубчатых передач, чувствительных к заклиниванию, или от ремней, чувствительных к разрывам.
Предпочтительно устройство выполнено таким образом, что первая ось X, вторая ось Y, шестая ось D и восьмая ось F пересекаются в первой точке О1, а первая ось X, третья ось А, четвертая ось В и пятая ось С пересекаются во второй точке О2.
Таким образом, различные оси вращения в устройстве пересекаются только в двух точках О1, О2, что позволяет получить особенно компактное устройство.
Согласно частному аспекту первого варианта осуществления, чтобы регистрировать движения поворота рычага 8 управления вокруг первой оси X и на их основании определять команды управления удаленными органами пилотирования, на противоположных боковых стенках 3а, 3b корпуса 1 соответственно установлены два потенциометра 37а, 37b. Боковые стенки 6а, 6b первой рамки 4 содержат, каждая, зубчатый сегмент 38а, 38b, который взаимодействует с входным валом потенциометра 37а, 37b соответствующей боковой стенки 3а, 3b корпуса 1, что позволяет потенциометрам регистрировать перемещение первой рамки 4 и, следовательно, рычага 8 управления вокруг первой оси X. Точно так же, чтобы регистрировать движения поворота рычага 8 управления вокруг второй оси Y и на их основании определять команды управления удаленными органами пилотирования, на продольных стенках 6с, 6d первой рамки 4 соответственно установлены два потенциометра 40с, 40d. Продольные стенки 6а, 6b второй рамки 10 содержат, каждая, зубчатый сегмент 41d, 41d, который взаимодействует с входным валом потенциометра соответствующей продольной стенки 6с, 6d корпуса 1, что позволяет потенциометрам регистрировать перемещение второй рамки 10 и, следовательно, рычага 8 управления вокруг второй оси Y.
Таким образом, можно легко измерять движения рычага управления вокруг первой оси X и второй оси Y.
На фиг. 7-10 представлен второй вариант осуществления изобретения. Элементы, общие с первым вариантом осуществления, имеют такие же ссылочные обозначения, увеличенные на сто.
Во втором варианте осуществления связь между рычагом 108 управления и первым передаточным валом 112 реализована так же, как и в первом варианте осуществления: поворот рычага 108 управления вокруг первой оси X приводит к соответствующему повороту первой рамки 104 вокруг первой оси X, что, в свою очередь, приводит к вращению первого передаточного вала 112 вокруг третьей оси А через первый механизм соединения. Первый механизм соединения в данном случае тоже содержит только одну деталь 150. Деталь 150 выполнена в данном случае в виде дужки, содержащей основание 170 и два плеча 171, 172, расположенные симметрично относительно основания 170. Первый передаточный вал 112 установлен на основании 170 на уровне своей прямолинейной концевой части 107 посредством двух коаксиальных подшипников 173, 174 качения. Каждый свободный конец плеч установлен на соответствующей продольной стенке первой рамки 104 через подшипник, при этом подшипники, связанные со свободными концами плеч, являются коаксиальными.
Таким образом, первый передаточный вал 112 непосредственно связан во вращении с первым механизмом соединения, который, в свою очередь, напрямую связан во вращении с первой рамкой 104.
Однако связь между рычагом 108 управления и вторым передаточным валом 123 реализована иначе, чем в первом варианте осуществления.
Согласно второму варианту осуществления вторая рамка 110 больше не соединена неподвижно с рычагом 108 управления. Рычаг 108 управления напрямую связан со второй рамкой 110 через девятое поворотное соединение вокруг девятой оси G, которая является нормальной к плоскости, содержащей первую ось X и вторую ось Y. В данном случае девятая ось G совпадает с шестой осью D.
Кроме того, второй механизм соединения больше не связан напрямую со второй рамкой 110. Действительно, устройство содержит платформу 151, напрямую связанную с корпусом 101 через десятое поворотное соединение вокруг десятой оси Н вращения, которая совпадает со второй осью Y. В свою очередь, вторая рамка 110 напрямую связана с платформой 151 через одиннадцатое поворотное соединение вокруг одиннадцатой оси I, которая в данном случае совпадает с первой осью X. Таким образом, второй механизм соединения установлен непосредственно с возможностью поворота посредством седьмого поворотного соединения вокруг первой оси X на платформе 151 (а не установлен непосредственно с возможностью поворота на второй рамке). Вместе с тем, второй передаточный вал 123 установлен с возможностью вращения непосредственно на втором механизме соединения, как в первом варианте осуществления. Второй механизм соединения тоже содержит только одну деталь 152. В данном случае деталь 152 выполнена в виде дужки, содержащей основание 175 и два плеча 176, 177, отходящие симметрично от основания 175. Второй передаточный вал 123 установлен на основании 175 на уровне своей прямолинейной концевой части 142 посредством двух коаксиальных подшипников 178, 179. Каждый свободный конец плеч установлен на соответствующей боковой стенке платформы 151 посредством подшипника, при этом подшипники, связанные со свободными концами плеч, являются коаксиальными (что более наглядно показано на фиг. 8).
Таким образом, поворот рычага 108 управления вокруг второй оси Y приводит к соответствующему повороту второй рамки 110, которая, в свою очередь, заставляет поворачиваться платформу 151, что приводит к вращению второго передаточного вала 123 вокруг шестой оси D через второй механизм соединения.
В отличие от первого варианта осуществления устройство согласно второму варианту осуществления изобретения позволяет полностью отделить движение поворота рычага 108 управления вокруг первой оси X от движения вращения второго передаточного вала 123 вокруг шестой оси D.
Кроме того, как и в первом варианте осуществления, различные оси вращения в устройстве согласно второму варианту осуществления пересекаются только в двух точках О1, О2, что позволяет получить особенно компактное устройство.
На фиг. 11 представлен третий вариант осуществления изобретения. Элементы, общие со вторым вариантом осуществления, имеют такие же ссылочные обозначения, увеличенные на сто.
В этом третьем варианте осуществления второй передаточный вал 223 расположен в устройстве таким образом, что шестая ось D, по существу, совпадает с первой осью X (тогда как в первом варианте осуществления и во втором варианте осуществления шестая ось была нормальной к плоскости, определяемой первой осью и второй осью). Таким образом, второй механизм соединения установлен непосредственно с возможностью поворота посредством седьмого поворотного соединения вокруг седьмой оси Е на платформе 251, при этом седьмая ось Е совпадает с девятой осью G (а не с первой осью X, как во втором варианте осуществления изобретения). Вместе с тем, второй передаточный вал 223 установлен с возможностью вращения непосредственно на втором механизме соединения, как во втором варианте осуществления. Второй механизм соединения тоже содержит только одну деталь 252.
Таким образом, поворот рычага 208 управления вокруг второй оси Y приводит к соответствующему повороту второй рамки 210, которая, в свою очередь, приводит в соответствующее вращение платформу 251, что приводит к вращению второго передаточного вала 223 вокруг первой оси X через второй механизм соединения.
Кроме того, первый передаточный вал 212 расположен в устройстве таким образом, что первая ось А, по существу, совпадает с девятой осью G. Таким образом, первый механизм соединения установлен с возможностью поворота непосредственно посредством четвертого поворотного соединения вокруг четвертой оси В на рычаге 208 управления (а не с возможностью поворота на первой рамке, как во втором варианте осуществления изобретения), при этом в данном случае четвертая ось В совпадает со второй осью Y (а не является параллельной второй оси, как во втором варианте осуществления изобретения). Вместе с тем, первый передаточный вал 212 установлен с возможностью вращения непосредственно на первом механизме соединения, как во втором варианте осуществления. Первый механизм соединения тоже содержит в данном случае только одну деталь 250.
Таким образом, поворот рычага 208 управления вокруг первой оси X приводит непосредственно к вращению первого передаточного вала 212 вокруг девятой оси G через первый механизм соединения.
Устройство согласно третьему варианту осуществления выполнено таким образом, что все оси (первая ось, вторая ось, третья ось, четвертая ось, пятая ось, шестая ось, седьмая ось, восьмая ось, девятая ось, десятая ось и одиннадцатая ось) пересекаются в одной и той же точке О.
Таким образом, корпус 1, содержащий различные основные элементы устройства, является особенно компактным.
Поскольку третья ось А и шестая ось D являются перпендикулярными и выходные валы первой группы приводов и второй группы приводов являются коаксиальными соответственно с третьей осью и с шестой осью, выходные валы первой группы приводов и второй группы приводов тоже являются перпендикулярными между собой.
Это позволяет получить новую конфигурацию устройства согласно изобретению.
Как и во втором варианте осуществления, устройство согласно третьему варианту осуществления изобретения позволяет полностью отделить движение поворота рычага 208 управления вокруг первой оси X от движения вращения второго передаточного вала 223 вокруг шестой оси D.
На фиг. 12-15 представлен четвертый вариант осуществления изобретения. Элементы, общие с первым вариантом осуществления, имеют такие же ссылочные обозначения, увеличенные на триста.
В этом четвертом варианте осуществления первый передаточный вал 312 расположен в устройстве таким образом, что третья ось А первого передаточного вала совпадает с шестой осью D второго передаточного вала 323. Таким образом, второй передаточный вал 323 установлен непосредственно с возможностью вращения через шестое поворотное соединение вокруг шестой оси D на первом передаточном валу 312 (а не с возможностью вращения на корпусе, как в первом варианте осуществления изобретения).
Для этого первый передаточный вал 312 имеет центральное отверстие, проходящее по всей длине первого передаточного вала 312. Второй передаточный вал 323 частично расположен внутри первого передаточного вала 312 и установлен с возможностью вращения в центральном отверстии первого передаточного вала 312 посредством подшипника 367.
Кроме того, в этом четвертом варианте осуществления первый механизм соединения непосредственно установлен с возможностью поворота через четвертое поворотное соединение вокруг четвертой оси В на рычаге 308 управления (а не с возможностью поворота на первой рамке, как в первом варианте осуществления изобретения), и в данном случае четвертая ось В совпадает со второй осью Y (а не является параллельной второй оси Y, как в первом варианте совпадает со второй изобретения).
Вместе с тем, первый передаточный вал 312 установлен с возможностью вращения непосредственно на первом механизме соединения, как в первом варианте осуществления. Предпочтительно первый механизм соединения содержит только одну деталь 361, которая, по существу, имеет форму дужки, содержащей основание 370 и два плеча 371, 372, отходящие симметрично от основания 370. Первый передаточный вал 312 установлен посредством пятого поворотного соединения на основании 370 через два коаксиальных подшипника 373, 374. Каждый свободный конец плеч установлен посредством четвертого поворотного соединения на соответствующей продольной стенке второй рамки 310 через подшипник, при этом подшипники, связанные со свободными концами плеч, являются коаксиальными.
Таким образом, поворот рычага 308 управления вокруг первой оси X приводит непосредственно к вращению первого передаточного вала 312 вокруг третьей оси А через первый механизм соединения.
Связь между рычагом 308 управления и вторым передаточным валом реализована, как и в первом варианте осуществления: поворот рычага 308 управления вокруг второй оси Y напрямую приводит к вращению второго передаточного вала 323 вокруг шестой оси D через второй механизм соединения. Предпочтительно в данном случае второй механизм соединения содержит крестовину 362, содержащую две ветви, расположенные перпендикулярно друг к другу, как и в первом варианте осуществления. Таким образом, первая ветвь 365 второй крестовины 362 установлена на второй платформе 310 через два коаксиальных подшипника, и первый изогнутый конец второго передаточного вала 323 расположен внутри второй ветви 366 и установлен с возможностью вращения посредством двух коаксиальных подшипников.
Устройство согласно четвертому варианту осуществления выполнено таким образом, что все оси (первая ось, вторая ось, третья ось, четвертая ось, пятая ось, шестая ось, седьмая ось, восьмая ось) пересекаются в одной и той же точке О.
Таким образом, корпус 301, содержащий различные основные элементы устройства, является особенно компактным.
Поскольку третья ось и шестая ось совпадаю, и выходные валы первой группы приводов и второй группы приводов являются коаксиальными соответственно с третьей осью и с шестой осью, выходные валы первой группы приводов и второй группы приводов тоже являются коаксиальными.
Таким образом, группы приводов вынесены и расположены под днищем корпуса 301 и друг под другом.
Устройство согласно четвертому варианту осуществления позволяет по-новому расположить группы приводов относительно корпуса 301 и, кроме того, имеет намного меньший габарит.
Как и устройство согласно первому варианту осуществления изобретения, устройство согласно четвертому варианту осуществления изобретения содержит восемь поворотных соединений и шесть основных элементов (первый передаточный вал 312, второй передаточный вал 323, первый рычаг 361, второй рычаг 362, первую рамку 304 и рычаг 308 управления) и одновременно позволяет связать группу приводов с каждым движением поворота рычага управления относительно корпуса. Таким образом, конструкция устройства согласно четвертому варианту осуществления упрощена.
В частности, как и в первом варианте осуществления, чтобы регистрировать движения поворота рычага 308 управления вокруг первой оси X и на их основании определять команды управления удаленными органами пилотирования, на противоположных боковых стенках 303а, 303b корпуса 301 соответственно установлены два потенциометра 337а, 337b. Боковые стенки 306а, 306b первой рамки 304 содержат, каждая, зубчатый сегмент 338а, 338b, который взаимодействует с входным валом потенциометра 337а, 337b соответствующей боковой стенки 303а, 303b корпуса 301, что позволяет потенциометрам регистрировать перемещение первой рамки 304 и, следовательно, рычага 308 управления вокруг первой оси X. Точно так же, чтобы регистрировать движения поворота рычага 308 управления вокруг второй оси Y и на их основании определять команды управления удаленными органами пилотирования, на продольных стенках 306d первой рамки 304 соответственно установлены два потенциометра 340d (из которых показан только один). Продольные стенки второй рамки 310 содержат, каждая, зубчатый сегмент 341d (из которых показан только один), который взаимодействует с входным валом потенциометра соответствующей продольной стенки 306d первой рамки 304, что позволяет потенциометрам регистрировать перемещение второй рамки 310 и, следовательно, рычага 308 управления вокруг второй оси Y.
На фиг. 16-18 представлен вариант устройства согласно четвертому варианту осуществления: движения рычага управления вокруг первой оси X и второй оси Y регистрируются иначе, чем связь между потенциометром и зубчатым сегментом. Элементы, общие с четвертым вариантом осуществления, имеют такие же ссылочные обозначения, увеличенные на тысячу.
Первая рамка 1304 установлена на корпусе 1301 посредством двух коаксиальных подшипников 1305а, 1305b, соответственно установленных на противоположных боковых стенках 1303а, 1303b корпуса 1301. Первая рамка 1304 содержит два отверстия 1391а, 1391b, проходящие соответственно через одну из ее боковых стенок 1306а, 1306b, при этом указанные два отверстия являются коаксиальными между собой и с подшипниками 1305а, 1305b, при этом отверстия имеют диаметры, меньшие диаметров указанных подшипников. На каждой из своих боковых стенок 1303а, 1303b корпус 1301 содержит палец 1392а, 1392b, который проходит внутри отверстия 1391а, 1391b соответствующей боковой стенки первой рамки 1304 и который является коаксиальным с двумя подшипниками 1305а, 1305b и, следовательно, с двумя отверстиями 1391а, 1391b. Между каждым пальцем корпуса 1301 и соответствующим отверстием первой рамки 1304 установлены два опорных подшипника, при этом в каждый опорный подшипник встроен угловой датчик. Таким образом, угловые датчики 1393а, 1393b содержат невращающуюся часть, связанную с соответствующим пальцем корпуса 1301, и вращающуюся часть, связанную с соответствующим отверстием первой рамки 1304. Таким образом, что касается движений поворота рычага 1308 управления вокруг первой оси X, взаимодействие между неподвижными и подвижными частями датчиков позволяет регистрировать перемещение первой рамки 1304 и, следовательно, рычага 1308 управления вокруг первой оси X.
Точно так же, что касается движений поворота рычага 1308 управления вокруг второй оси Y, вторая рамка 1310 рычага 1308 управления установлена на первой рамке 1304 посредством двух коаксиальных подшипников 1311с, 1311d, неподвижно соединенных соответственно с противоположными продольными стенками 1306с, 1306d первой рамки 1304. Вторая рамка 1310 имеет два отверстия 1394с, 1394d, проходящие соответственно через одну из ее продольных стенок, при этом указанные два отверстия имеют диаметры, меньшие диаметров указанных подшипников. На каждой из своих продольных стенок 1306с, 1306d первая рамка 1304 содержит палец 1395с, 1395d, который проходит внутри отверстия 1394с, 1394d соответствующей продольной стенки второй рамки 1310 и который является коаксиальным с двумя подшипниками 1311с, 1311d и, следовательно, с двумя отверстиями 1394с, 1394d. Между каждым пальцем первой рамки 1304 и соответствующим отверстием второй рамки 1310 установлен опорный подшипник, при этом в каждый опорный подшипник встроен угловой датчик. Таким образом, угловые датчики 1396с, 1396d содержат невращающуюся часть, связанную с соответствующим пальцем первой рамки 1304, и вращающуюся часть, связанную с соответствующим отверстием второй рамки 1310. Таким образом, что касается движений поворота рычага 1308 управления вокруг второй оси Y, взаимодействие между неподвижными и подвижными частями датчиков позволяет регистрировать перемещение второй рамки 1310 и, следовательно, рычага 1308 управления вокруг второй оси Y.
Встраивание средств для измерения движений поворота рычага 1308 управления вокруг первой оси X и второй оси Y в подшипники, обеспечивающие поворотное соединение между корпусом 1301 и первой рамкой 1304, и в подшипники, обеспечивающие поворотное соединение между второй рамкой 1310 и первой рамкой 1304, позволяет получить устройство меньшего размера (разница хорошо прослеживается между фиг. 13 и 17). Кроме того, измерения движений поворота рычага 1308 управления вокруг первой оси X и второй оси Y являются более точными. Наконец, ослабляются трения между первой рамкой 1304, корпусом 1301 и второй рамкой 1310, благодаря присутствию опорных подшипников, содержащих угловые датчики.
На фиг. 19-21 представлен пятый вариант осуществления изобретения. Элементы общие с четвертым вариантом осуществления, имеют такие же ссылочные обозначения, увеличенные на сто, и элементы, общие с вторым вариантом осуществления, имеют такие же ссылочные обозначения, увеличенные на триста.
Связь между рычагом 408 управления и первым передаточным валом 412 реализована, как в четвертом варианте осуществления: поворот рычага 408 управления вокруг первой оси X приводит к вращению первого передаточного вала 412 вокруг третьей оси А через первый механизм соединения. Предпочтительно первый механизм соединения содержит первый рычаг 461, первый конец которого установлен с возможностью поворота на рычаге 408 управления посредством четвертого поворотного соединения, и второй конец которого выполнен изогнутым и установлен с возможностью поворота на первом передаточном валу 412 посредством пятого поворотного соединения.
Вместе с тем, связь между рычагом 408 управления и вторым передаточным валом 423 реализована иначе, чем в четвертом варианте осуществления, и, по существу, как во втором варианте осуществления.
Согласно пятому варианту осуществления рычаг 408 управления непосредственно связан со второй рамкой 410 через девятое поворотное соединение вокруг девятой оси G, которая является нормальной к плоскости, содержащей первую ось X и вторую ось Y. В данном случае девятая ось G совпадает с шестой осью D и с третьей осью А. Устройство содержит также платформу 451, напрямую связанную с корпусом 401 через десятое поворотное соединение вокруг десятой оси Н вращения, которая совпадает со второй осью Y. Вторая рамка 410, в свою очередь, напрямую связана с платформой 451 через одиннадцатое поворотное соединение вокруг одиннадцатой оси I, которая в данном случае совпадает с первой осью X.
Таким образом, второй механизм соединения непосредственно установлен с возможностью поворота через седьмое поворотное соединение вокруг первой оси X на первой рамке 410. Вместе с тем, второй передаточный вал 423 непосредственно установлен с возможностью вращения на втором механизме соединения, как в четвертом варианте осуществления. Предпочтительно второй механизм соединения содержит второй рычаг 462, первый конец которого установлен с возможностью поворота на второй рамке 410 посредством седьмого поворотного соединения, а второй конец выполнен изогнутым и установлен с возможностью поворота на втором передаточном валу 423 посредством восьмого поворотного соединения.
Таким образом, поворот рычага 408 управления вокруг второй оси Y приводит к соответствующему повороту второй рамки 410, которая, в свою очередь, приводит во вращение второй передаточный вал 423 вокруг шестой оси D через второй механизм соединения.
Устройство согласно пятому варианту осуществления выполнено таким образом, что все оси (первая ось, вторая ось, третья ось, четвертая ось, пятая ось, шестая ось, седьмая ось, восьмая ось, девятая ось, десятая ось и одиннадцатая ось) пересекаются в одной и той же точке О.
Таким образом, корпус 401, содержащий различные основные элементы устройства, является особенно компактным.
Поскольку третья ось и шестая ось совпадают и выходные валы первой группы приводов и второй группы приводов являются коаксиальными соответственно с третьей осью и с шестой осью, выходные валы первой группы приводов и второй группы приводов тоже являются коаксиальными.
Таким образом, группы приводов вынесены и расположены под днищем корпуса 401 и друг под другом.
Устройство согласно пятому варианту осуществления позволяет по-новому расположить группы приводов относительно корпуса и, кроме того, имеет намного меньший габарит.
В отличие от первого варианта осуществления и от четвертого варианта осуществления устройство согласно пятому варианту осуществления позволяет полностью отделить движение поворота рычага 408 управления вокруг первой оси X от движения вращения второго передаточного вала 423 вокруг шестой оси D.
Разумеется, изобретение не ограничивается описанными вариантами осуществления, и его можно дополнять вариантами, не выходя за рамки изобретения, определенными формулой изобретения.
В частности, хотя рычаг управления связан с первым приводным органом и со вторым приводным органом, можно обеспечить соединение рычага управления с третьим приводным органом управления для поворота рычага управления вокруг оси, пересекающей первую ось и вторую ось и нормальной к плоскости, определяемой первой осью и второй осью, когда рычаг управления находится в нейтральном положении.
Под нейтральным положением следует понимать положение рычага управления, в котором на рычаг управления не действует никакое усилие, поэтому, если бы устройство опиралось на плоскую поверхность, плоскость, образованная первой осью и второй осью, была бы параллельной указанной поверхности.
Несмотря на то, что в данном случае каждый приводной орган содержит группу электрических двигателей, приводные органы могут содержать любое механическое средство создания момента. Так, каждый приводной орган может содержать тройной привод вместо группы приводов, содержащей три двигателя. Каждый приводной орган может содержать только один двигатель.
Хотя в первом варианте осуществления передаточные валы напрямую связаны с выходными валами соответствующих групп приводов, в варианте передаточные валы могут быть связаны с выходными валами через устройства передачи движения. Передаточные валы могут быть связаны с выходными валами двигателей посредством любого известного средства, отличного от шлица, такого как фланцы с болтовым креплением.
Хотя в первом варианте осуществления изогнутая часть одного из передаточных валов расположена под углом 25 градусов относительно остальной части соответствующего передаточного вала, изогнутую часть можно выполнить таким образом, чтобы пятая ось (или восьмая ось) располагалась под углом в интервале ]Х; Х[ градусов относительно третьей оси (или шестой оси). Точно так же можно адаптировать угол изогнутой части рычагов из четвертого варианта осуществления или из пятого варианта осуществления для получения необходимого наклона пятой оси или восьмой оси. В целом, выбирают специальную геометрию механизмов соединения и/или передаточных валов, чтобы адаптировать наклон пятой оси или восьмой оси.
Разумеется, в рамках изобретения, если две детали установлены с возможностью поворота относительно друг друга, это может происходить напрямую (при этом обе детали входят друг с другом в контакт) или через другие детали.
Одна или другая из деталей, связанных поворотным соединением, могут содержать подшипники или любое другое средство, необходимое для реализации поворотного соединения между двумя деталями.
Передаточные валы могут быть установлены с возможностью поворота относительно корпуса вокруг третьей оси и шестой оси, будучи напрямую направляемыми и установленными с возможностью вращения на статоре соответствующего приводного двигателя.
Хотя в данном случае движения поворота рычага управления вокруг первой оси X и второй оси Y регистрируются за счет взаимодействия зубчатого сегмента с потенциометром, эти поворотные движения можно измерять по-другому. Непосредственно в приводах можно установить угловые датчики для взаимодействия с передаточными валами и для измерения угловых перемещений передаточных валов вокруг третьей оси А и шестой оси D, при этом угловые перемещения напрямую связаны с движениями поворота рычага вокруг первой оси X и второй оси Y. Угловые датчики также могут быть расположены в подшипниках, обеспечивающих поворотные соединения между двумя деталями устройства, как было описано для версии четвертого варианта осуществления.
Предпочтительно устройство может содержать разные средства для измерения движений поворота рычага управления вокруг первой оси X и/или второй оси Y. Таким образом, можно сравнивать результаты, получаемые посредством этих различных средств: в случае слишком большого отклонения можно сделать вывод о неисправности некоторых средств или о наличии существенных зазоров между некоторыми деталями устройства.
Устройство может также содержать один или несколько датчиков усилий для измерения усилий, которыми пилот действует на рычаг управления.
В вариантах осуществления, в которых движение рычага управления вокруг первой оси X слегка связано с движением вращения второго передаточного вала вокруг шестой оси D (как в первом варианте осуществления, в четвертом варианте осуществления и в версии четвертого варианта осуществления), группы приводов можно выполнить с возможностью компенсации возвратного усилия для пилота, перемещающего рычаг управления, чтобы устранить ощущение связывания.
Первый вариант и второй вариант осуществления позволяют встроить устройство согласно изобретению в подлокотник кабины экипажа, в частности, вертолета. Четвертый вариант и его версия и пятый вариант позволяют встроить устройство согласно изобретению в колонку кабины экипажа, в частности, вертолета.
Предпочтительно различные элементы, общие между различными описанными выше вариантами осуществления (первым вариантом осуществления, вторым вариантом осуществления, четвертым вариантом осуществления и пятым вариантом осуществления), могут быть идентичными, в частности, группы приводов и подшипники. Это позволяет предложить заказчику различные возможные конфигурации с многочисленными деталями, общими для разных конфигураций.
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства

