Результат интеллектуальной деятельности: ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ
Вид РИД
Изобретение
Изобретение относится к электротехнике и может быть использовано в электроприводах различного отраслевого применения, построенных на основе асинхронного короткозамкнутого двигателя.
Известен электропривод переменного тока (патент RU №2101846, опубл. 10.01.1998), содержащий m-фазный асинхронный двигатель с короткозамкнутым ротором, в котором статорная обмотка соединена в m/3 трехфазные системы, подключенный к преобразователю частоты, первый управляющий вход которого подсоединен к выходу вычислителя амплитуды, два входа которого подключены соответственно к выходам первого и второго регуляторов напряжения, причем вход первого регулятора напряжения подключен к выходу первого трехвходового сумматора, первый вход которого подсоединен к первому выходу датчика напряжения, второй вход первого сумматора подсоединен к выходу регулятора тока, вход которого подключен к выходу второго сумматора, первый вход которого соединен с первым выходом датчика тока, а второй вход соединен с выходом блока определения модуля тока статора, первый вход которого соединен с выходом блока задания начального тока статора, а второй вход через регулятор скорости с выходом третьего сумматора, первый вход которого подключен к выходу блока задания частоты вращения, а второй вход подключен к выходу датчика частоты вращения, установленного на валу асинхронного двигателя, причем выход регулятора скорости подключен также к первому входу четвертого сумматора, второй вход которого соединен с выходом вычислителя момента, первый вход которого соединен с первым выходом датчика тока, а выход четвертого сумматора соединен с входом регулятора момента, выход которого соединен с первым входом пятого трехвходового сумматора, второй вход которого соединен с вторым выходом датчика напряжения, выход пятого сумматора соединен с входом второго регулятора напряжения, причем второй и третий выходы датчика тока соединены с соответствующими входами датчика напряжения, входы датчика тока и напряжения включены в соответствующие фазные цепи двигателя, отличающийся тем, что в него дополнительно введены блок компенсации перекрестных нелинейных связей, первый вход которого соединен с первым выходом датчика тока, второй вход соединен с выходом датчика частоты вращения, а третий вход соединен с выходом шестого сумматора, причем первый выход блока компенсации соединен с третьим входом первого сумматора, второй выход соединен с третьим входом пятого сумматора, а третий выход соединен с входом блока возведения в квадрат, выход которого соединен с первым входом седьмого сумматора, второй вход которого соединен с выходом блока задания квадрата потокосцепления ротора, а выход седьмого сумматора соединен с входом блока извлечения квадратного корня, выход которого соединен с первым входом первого блока деления, второй вход которого соединен с выходом второго блока деления, а выход первого блока деления соединен с первым входом шестого сумматора и с вторым входом вычислителя момента, первый вход второго делителя соединен с первым выходом датчика тока статора, а второй вход через линейный блок соединен с выходом регулятора скорости, причем второй вход шестого сумматора соединен с выходом датчика частоты вращения, а выход шестого сумматора соединен с первым входом восьмого сумматора, второй вход которого подключен к выходу первого сумматора, а третий вход к выходу пятого сумматора, выход восьмого сумматора соединен с вторым управляющим входом преобразователя частоты.
Недостатком данного электропривода является сложная структура, большое количество настроечных элементов, что влечет в сложность в настройке. Так электропривод содержит четыре регулятора: два регулятора напряжений, регулятор скорости, регулятор тока. Большое количество регуляторов влечет за собой сложность в их настройке. В электроприводе используется большое количество датчиков: три датчика тока, три датчика напряжения; датчик скорости. Большое количество датчиков существенно снижает надежность электропривода.
Известен частотно-регулируемый асинхронный электропривод (патент RU №2313894, опубл. 27.12.2007), принятый за прототип, который содержит силовой блок с входящими в него последовательно соединенными выпрямителем напряжения сети, сглаживающим фильтром с датчиком напряжения, инвертор напряжения, управляющие входы которого соединены с выходами блока векторной ШИМ, электродвигатель, обмотки которого подключены через блок датчиков фазных токов к выходу инвертора напряжения, а выходной вал к датчику скорости вращения его ротора и к передаточному механизму, задатчик текущей угловой скорости электродвигателя, подключенный к первому входу регулятора частоты вращения, ко второму входу которого подключен выход датчика скорости вращения ротора, задатчик потокосцепления электродвигателя, подключенный через масштабный усилитель к первому входу регулятора реактивного тока, выход которого подключен к первому входу координатного преобразователя напряжений, ко второму входу которого подключен регулятор активного тока, выходы координатного преобразователя напряжений подключены ко входам блока векторной ШИМ, координатный преобразователь токов, соединенный входами к выходам блока датчиков фазных токов, а выходами со вторым входом регулятора реактивного тока и с первым входом регулятора активного тока, отличающийся тем, что в него введены блок деления и наблюдательный блок состояния электропривода, снабженный первым и вторым масштабными усилителями, апериодическим звеном, делителем, интегратором и сумматором, при этом выход первого масштабного усилителя подключен к первому входу делителя, выход которого через интегратор подключен к первому входу сумматора, ко второму входу которого подключен выход второго масштабного усилителя, выход сумматора подключен к одному из входов блока векторной ШИМ, к входу координатного преобразователя токов и к входу координатного преобразователя напряжений, выход апериодического звена соединен со вторым входом делителя и первым входом блока деления, ко второму входу которого подключен выход регулятора частоты вращения, выход блока деления подключен ко второму входу регулятора активного тока и ко входу первого масштабного усилителя, а датчик скорости вращения ротора электродвигателя выполнен в виде импульсного датчика с двумя выходами, первый из которых является выходом углового положения ротора электродвигателя, а второй - выходом скорости вращения ротора электродвигателя, при этом первый выход импульсного датчика соединен с входом второго масштабного усилителя.
Недостатком данного электропривода является сложная структура, большое количество настроечных элементов, что влечет в сложность в настройке. Так электропривод содержит три регулятора: регулятор частоты вращения, реактивного и активного тока. Большое количество регуляторов влечет за собой сложность в их настройке. В электроприводе используется большое количество датчиков: три датчика тока, датчик напряжения; датчик скорости. Большое количество датчиков существенно снижает надежность электропривода.
Техническим результатом изобретения является снижение пульсаций электромагнитного момента за счет обеспечения плавного движения вектора напряжения и повышение динамических характеристик, упрощение конструкции.
Технический результат достигается тем, что высокодинамичный бездатчиковый асинхронный электропривод с непосредственным управлением моментом, состоящий из силового блока с входящими в него последовательно соединенными выпрямителем напряжения сети, сглаживающего фильтра с датчиком напряжения, инвертора напряжения, электродвигателя, обмотки которого подключены через блок датчиков фазных токов 6 к выходу инвертора напряжения, задатчика текущей угловой скорости электродвигателя, регулятора частоты вращения, задатчика потокосцепления электродвигателя, наблюдательный блока состояния электропривода, сумматоров, координатного преобразователя напряжений, блоков деления, вычислителя проекций вектора напряжения, формирователя проекций вектора напряжений, векторного модулятора, при этом наблюдательный блок состояния электропривода снабжен преобразователем фаз, вычислителем текущего значения потокосцепления, вычислителем текущего значения тока, вычислителем текущего значения угла вектора потокосцепления, вычислителем текущего значения электромагнитного момента, вычислителем модуля потокосцепления статора, вычислителем угловой скорости, блок формирователя проекций вектора напряжений снабжен первым, вторым, третьим, четвертым и пятым масштабным усилителем, сумматором, первым и вторым делителем, первым и вторым перемножителем, при этом задатчик текущей угловой скорости электродвигателя подключен к первому входу сумматора и пятому входу формирователя проекций вектора напряжений, а ко второму входу сумматора подключен четвертый выход наблюдательного блока состояния электропривода выход сумматора подключен ко входу регулятор частоты вращения, выход которого подключен к первому входу сумматора и первому входу формирователя проекций вектора напряжений, второй вход сумматора подключен ко второму выходу наблюдательного блока состояния электропривода, а выход сумматора подключен ко второму входу формирователя проекций вектора напряжений, выход задатчика потокосцепления электродвигателя подключен к первому входу сумматора и третьему входу формирователя проекций вектора напряжений, второй вход сумматора подключен к третьему выходу наблюдательного блока состояния электропривода, выход сумматора подключен к четвертому входу формирователя проекций вектора напряжений, первый и второй выход формирователя проекций вектора напряжений соответственно подключен к первому и второму входам координатного преобразователя напряжений, третий вход которого соединен с первым выходом наблюдательного блока состояния электропривода, первый и второй выходы координатного преобразователя напряжений подключены соответственно к первому и второму входу векторного модулятора, третий вход которого подключен к датчику напряжения, первый выход к инвертору напряжения, а второй выход к первому входу вычислителя проекций вектора напряжения, второй вход которого подключен к датчику напряжения, а первый и второй выход к первому и второму входу наблюдательного блока состояния электропривода, третий и четвертый вход наблюдательного блока состояния электропривода подключены к блоку датчиков фазных токов, первый и второй вход наблюдательного блока состояния электропривода подключены соответственно к первому и второму входу вычислителя текущего значения потокосцепления, а третий и четвертый вход - к первому и второму входу преобразователя фаз все выходы вычислителя текущего значения потокосцепления подключены в входам вычислителя текущего значения тока, при этом первый и второй выход также подключены ко входам вычислителя текущего значения угла вектора потокосцепления, первому и второму входу вычислителя текущего значения электромагнитного момента и ко входам вычислителя модуля потокосцепления статора, первый и второй выход преобразователя фаз подключены к третьему и четвертому вход вычислителя текущего значения электромагнитного момента и пятому и шестому входу вычислителя угловой скорости, первый и четвертый вход которого подключен к третьему и четвертому выходу вычислителя текущего значения потокосцепления, а второй и третий вход - к первому и второму выходу вычислителя текущего значения тока, к первому выходу наблюдательного блока состояния электропривода подключен выход вычислителя текущего значения угла вектора потокосцепления, ко второму выходу - выход вычислителя текущего значения электромагнитного момента, к третьему - выход вычислителя модуля потокосцепления статора, к четвертому - выход вычислителя угловой скорости, а также к третьему входу вычислителя текущего значения потокосцепления, четвертый вход блока формирователя проекций вектора напряжений подключен к входу первого масштабного усилителя и первому входу второго перемножителя, пятый вход блока формирователя проекций вектора напряжений подключен к первому входу первого перемножителя, второй вход блока формирователя проекций вектора напряжений подключен ко второму входу второго перемножителя и к входу четвертого масштабного усилителя, третий вход блока формирователя проекций вектора напряжений подключен ко входу третьего масштабного усилителя, второму входу первого перемножителя и второму входу первого делителя, а первый вход блока формирователя проекций вектора напряжений подключен к первому входу первого делителя, к первому входу сумматора подключен выход второго масштабного усилителя, вход которого подключен к выходу первого перемножителя, второй вход сумматора подключен к выводу второго делителя, первый и второй вход которого подключены к выходу второго перемножителя и третьего масштабного усилителя соответственно, третий вход сумматора подключен к выходу четвертого масштабного усилителя, четвертый вход сумматора подключен к выходу пятого масштабного усилителя, вход которого подключен к выходу первого делителя, первый выход блока формирователя проекций вектора напряжений подключен к выходу первого масштабного усилителя, в второй - к выходу сумматорами.
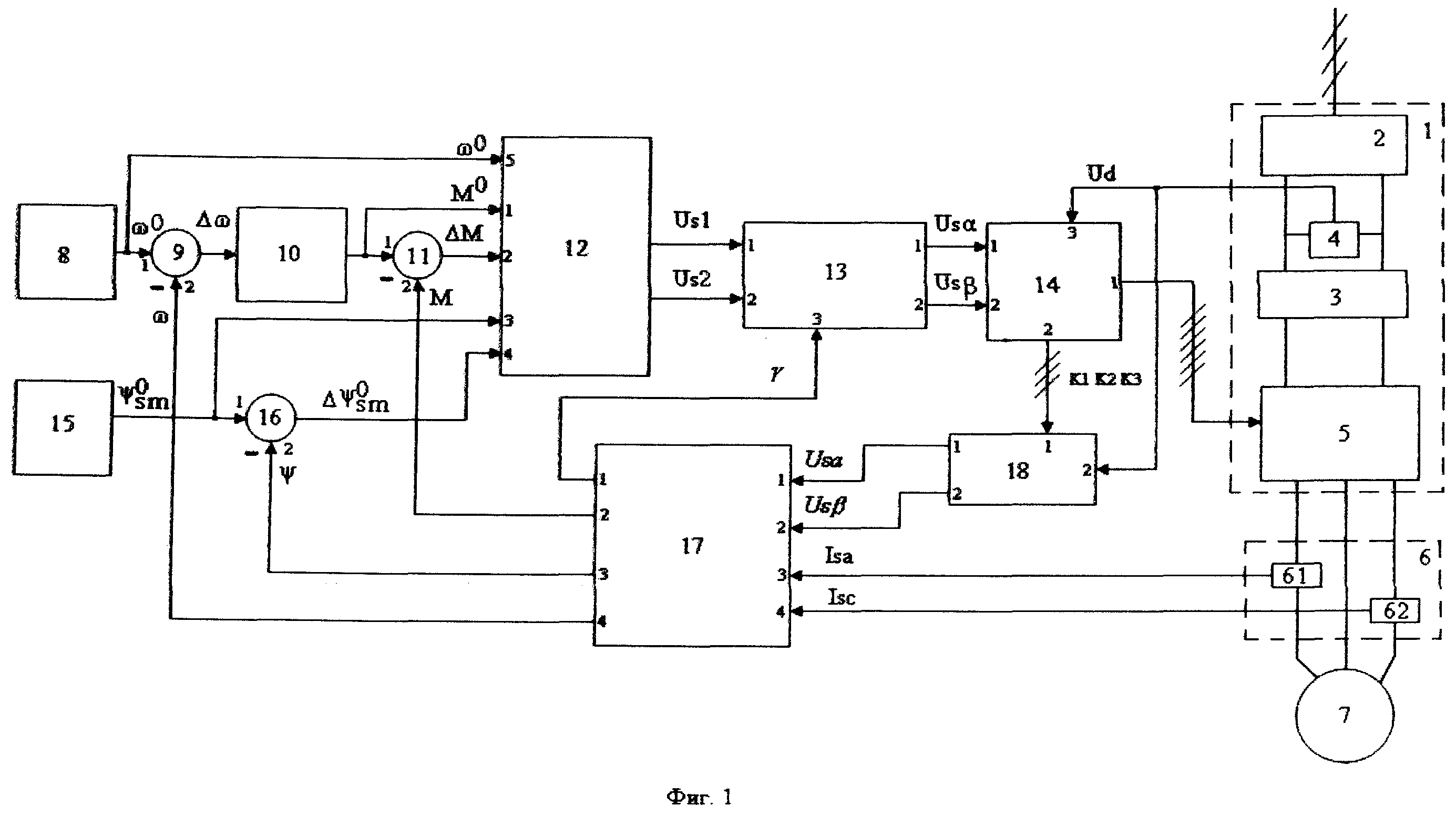
Структурная схема высокодинамичного бездатчикового асинхронного электропривода с непосредственным управлением моментом представлена на фиг.1. Структурная схема наблюдательного блока состояния электропривода представлена на фиг.2. Структурная схема формирователя проекций вектора напряжений представлена на фиг.3.
Высокодинамичный бездатчиковый асинхронный электропривод с непосредственным управлением моментом включает силовой блок 1, в который входят последовательно соединенными выпрямитель напряжения сети 2, сглаживающий фильтр 3 с датчиком напряжения 4, инвертор напряжения 5 и электродвигатель 7, обмотки которого подключены через блок датчиков фазных токов 6 к выходу инвертора напряжения. Задатчик текущей угловой скорости электродвигателя 8, регулятор частоты вращения 10 и задатчик потокосцепления электродвигателя 15. Наблюдательный блок состояния электропривода 17, сумматоры, координатный преобразователь напряжений 13, и блок деления. Также электропривод снабжен вычислителем проекций вектора напряжения 18, формирователем проекций вектора напряжений 12 и векторным модулятором 14.
Наблюдательный блок состояния электропривода 17 снабжен преобразователем фаз 19, вычислителем текущего значения потокосцепления 20, вычислителем текущего значения тока 21, вычислителем текущего значения угла вектора потокосцепления 22, вычислителем текущего значения электромагнитного момента 23, вычислителем модуля потокосцепления статора 24 и вычислителем угловой скорости 25.
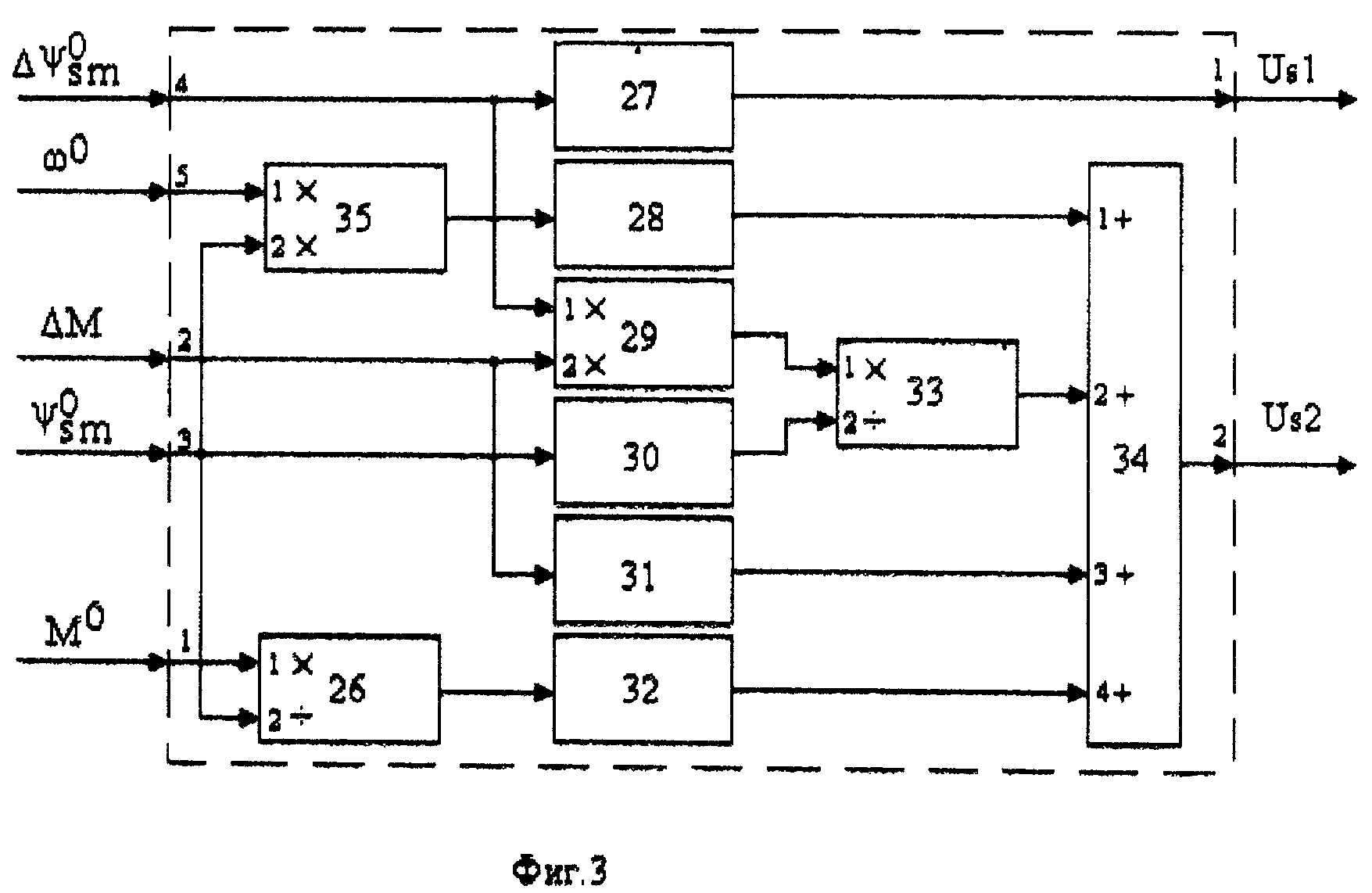
Блок формирователя проекций вектора напряжений 12 снабжен первым, вторым, третьим, четвертым и пятым масштабным усилителем, сумматором (34), первым и вторым делителем (26, 33), первым и вторым перемножителем (35, 29). Задатчик текущей угловой скорости электродвигателя 8 подключен к первому входу сумматора 9 и пятому входу формирователя проекций вектора напряжений 12, а ко второму входу сумматора 9 подключен четвертый выход наблюдательного блока состояния электропривода 17. Выход сумматора 9 подключен ко входу регулятор частоты вращения 10, выход которого подключен к первому входу сумматора 11 и первому входу формирователя проекций вектора напряжений 12. Второй вход сумматора 11 подключен ко второму выходу наблюдательного блока состояния электропривода 17. Выход сумматора 11 подключен ко второму входу формирователя проекций вектора напряжений 12. Выход задатчика потокосцепления электродвигателя 15 подключен к первому входу сумматора 16 и третьему входу формирователя проекций вектора напряжений 12. Второй вход сумматора 16 подключен к третьему выходу наблюдательного блока состояния электропривода 17. Выход сумматора 16 подключен к четвертому входу формирователя проекций вектора напряжений 12. Первый и второй выход формирователя проекций вектора напряжений 12 соответственно подключен к первому и второму входам координатного преобразователя напряжений 13, третий вход которого соединен с первым выходом наблюдательного блока состояния электропривода 17. Первый и второй выходы координатного преобразователя напряжений 13 подключены соответственно к первому и второму входу векторного модулятора 14, третий вход которого подключен к датчику напряжения 4, первый выход к инвертору напряжения 5, а второй выход к первому входу вычислителя проекций вектора напряжения 18, второй вход которого подключен к датчику напряжения 4, а первый и второй выход к первому и второму входу наблюдательного блока состояния электропривода 17.
Третий и четвертый вход наблюдательного блока состояния электропривода 17 подключены к блоку датчиков фазных токов 6, первый и второй вход - наблюдательного блока состояния электропривода 17 подключены соответственно к первому и второму входу вычислителя текущего значения потокосцепления 20, а третий и четвертый вход - к первому и второму входу преобразователя фаз 19. Все выходы вычислителя текущего значения потокосцепления 20 подключены к входам вычислителя текущего значения тока 21.
Первый и второй выход также подключены ко входам вычислителя текущего значения угла вектора потокосцепления 22, первому и второму входу вычислителя текущего значения электромагнитного момента 23 и ко входам вычислителя модуля потокосцепления статора 24. Первый и второй выход преобразователя фаз 19 подключены к третьему и четвертому вход вычислителя текущего значения электромагнитного момента 23 и пятому и шестому входу вычислителя угловой скорости 25. Первый и четвертый вход которого подключен к третьему и четвертому выходу вычислителя текущего значения потокосцепления 20, а второй и третий вход - к первому и второму выходу вычислителя текущего значения тока 21. К первому выходу наблюдательного блока состояния электропривода 17 подключен выход вычислителя текущего значения угла вектора потокосцепления 22, ко второму выходу - выход вычислителя текущего значения электромагнитного момента 23, к третьему - выход вычислителя модуля потокосцепления статора 24, к четвертому - выход вычислителя угловой скорости 25, а также к третьему входу вычислителя текущего значения потокосцепления 20.
Четвертый вход блока формирователя проекций вектора напряжений 12 подключен к входу первого масштабного усилителя 27 и первому входу второго перемножителя 29, пятый вход блока формирователя проекций вектора напряжений 12 подключен к первому входу первого перемножителя 35, второй вход блока формирователя проекций вектора напряжений 12 подключен ко второму входу второго перемножителя 29 и к входу четвертого масштабного усилителя 31, третий вход блока формирователя проекций вектора напряжений 12 подключен ко входу третьего масштабного усилителя 30, второму входу первого перемножителя 35 и второму входу первого делителя 26, а первый вход блока формирователя проекций вектора напряжений 12 подключен к первому входу первого делителя 26.
К первому входу сумматора 34 подключен выход второго масштабного усилителя 28, вход которого подключен к выходу первого перемножителя 35, второй вход сумматора 34 подключен к выводу второго делителя 33, первый и второй вход которого подключены к выходу второго перемножителя 29 и третьего масштабного усилителя 30 соответственно, третий вход сумматора 34 подключен к выходу четвертого масштабного усилителя 31, четвертый вход сумматора 34 подключен к выходу пятого масштабного усилителя 31, вход которого подключен к выходу первого делителя 26. Первый выход блока формирователя проекций вектора напряжений 12 подключен к выходу первого масштабного усилителя 27, в второй - к выходу сумматорами 34.
Электропривод работает следующим образом. В силовой блок 1, на вход выпрямителя напряжения сети 2, подводят трехфазное переменное напряжения питания. На выходе выпрямителя напряжения сети 2 получают постоянное напряжение. Через сглаживающего фильтра 3, с помощью которого устраняют пульсации постоянного напряжения, последнее подводят к инвертору напряжения 5.
С помощью задатчика текущей угловой скорости электродвигателя 8 устанавливают заданное значение угловой скорости электродвигателя, а с помощью задатчика потокосцепления электродвигателя 15 - заданное значение потокосцепления электродвигателя.
К наблюдательному блоку состояния электропривода 17, подводят текущее значение тока фаз статора и текущее значение проекцией вектора напряжения статора. Текущее значение тока фаз статора получают с помощью блока датчиков фазных токов 6.
Текущее значение проекцией вектора напряжения статора определяют с помощью вычислителя текущего значения выпрямленного напряжения 18 по текущего значения выпрямленного напряжения Ud, которое получают от датчика напряжения 4, и коммутационной функций K1, K2, К3, которую получают от векторного модулятора 14. Для этого сначала определяют значение фазных напряжений по выражениям:
а затем текущие значения проекцией вектора напряжения статора:
В наблюдательном блоке состояния электропривода 17 по текущем значениям тока фаз статора Isa, Isc в преобразователе фаз 19 определяют текущее значение проекций тока статора по формулам:
В вычислителе текущего значения потокосцепления 20 по текущему значению проекцией вектора напряжения статора и текущей угловой скорости электродвигателя определяют текущие значения проекцией вектора потокосцеплений статора и ротора путем решения полной системы уравнений двигателя:
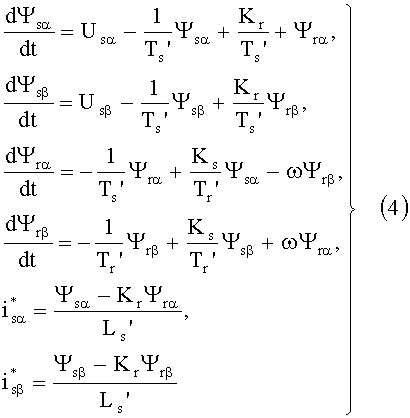
где:  ,
,  ,
,  . Параметры роторной цепи определяются аналогично.
. Параметры роторной цепи определяются аналогично.
На основании выходных сигналов преобразователя фаз 19 о текущих значениях проекций тока статора и вычислителя текущего значения потокосцепления 20 о текущие значения проекцией вектора потокосцеплений статора и ротора определяют:
текущее значение угла поворота вектора потокосцепления статора в вычислителе текущего значения угла вектора потокосцепления 22:
текущее значение электромагнитного момента в вычислителе текущего значения электромагнитного момента 23

текущее значение модуля вектора потокосцепления статора в вычислителе модуля потокосцепления статора 24

текущее значение угловой скорость электродвигателя в вычислителе угловой скорость электродвигателя
Текущее значение угловой скорость электродвигателя с помощью сумматора 9 сравнивают с заданной значений угловой скоростью электродвигателя. После чего сигнал рассогласования по угловой скорости поступает на вход регулятора частоты вращения 10, на выходе которого формируется задание на электромагнитный момент электродвигателя. Этот сигнал поступает на вход сумматора 11 и формирователя проекций вектора напряжений 12. Также на вход сумматора 11 поступает текущее значение электромагнитного момента. Сумматор 11 формирует сигнал рассогласования по электромагнитному моменту, который поступает на вход формирователя проекций вектора напряжений 12.
Текущее значение модуля вектора потокосцепления статора с помощью сумматора 1 6 сравнивают с заданным значением потокосцепления электродвигателя и формируют сигнал рассогласования по потокосцеплению, которое поступают на вход формирователя проекций вектора напряжений 12. Заданное значение потокосцепления электродвигателя с выхода задатчика потокосцепления электродвигателя 15 также поступает на вход формирователя проекций вектора напряжений 12.
Формирователь проекций вектора напряжений 12 формирует заданные значения проекцией напряжения статора на основании выражений
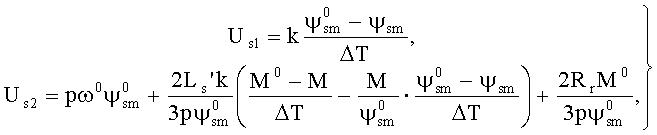
где ω0 заданное значение угловой скорости электродвигателя, М0 - задание на электромагнитный момент электродвигателя, ΔМ0 - рассогласования по электромагнитному моменту,  - заданное значение потокосцепления электродвигателя,
- заданное значение потокосцепления электродвигателя,  - рассогласования по потокосцеплению, ΔT - шаг счета, k - коэффициент, р - число пар полюсов, формирует заданные значение проекцией напряжения статора.
- рассогласования по потокосцеплению, ΔT - шаг счета, k - коэффициент, р - число пар полюсов, формирует заданные значение проекцией напряжения статора.
Затем с помощью блока координатного преобразователя напряжений 13 полученные от формирователя проекций вектора напряжений 12 заданные значения проекцией напряжения статора преобразуют из вращающейся с произвольной скоростью системы координат с в систему координат вращающеюся синхронно статору. В векторном модуляторе 14, который реализует пространственно-векторный алгоритм модулирования, на основе последних формируют коммутационные функции управления инвертором напряжения и передают к нему на вход. В результате на выходе инвертора формируется напряжение пинания электродвигателя с необходимой амплитудой и частотой.
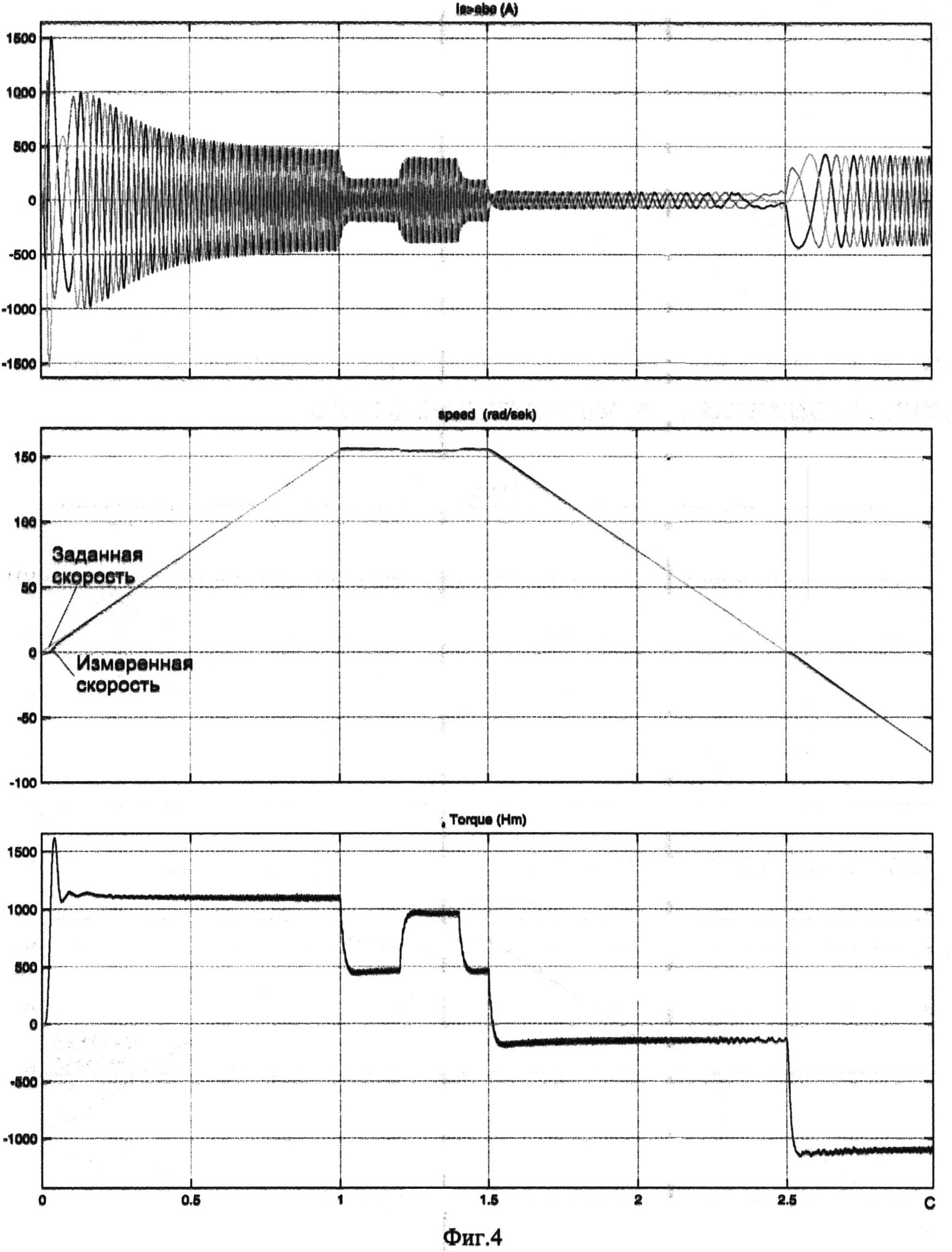
На фиг.4 приведена графики переходных процессов в высокодинамичном асинхронном электроприводе с непосредственным вычислением вектора напряжения. Асинхронный двигатель разгоняется с номинальной нагрузкой до номинальной скорости за 1 с. После разгона производится наброс и сброс дополнительной номинальной нагрузки, торможение за 1 с и реверс.
Таким образом, устройство обеспечивает снижение пульсаций электромагнитного момента за счет обеспечения плавного движения вектора напряжения и повышение динамических характеристик, упрощение конструкции.
Высокодинамичный бездатчиковый асинхронный электропривод с непосредственным управлением моментом, содержащий силовой блок с входящими в него последовательно соединенными выпрямителем напряжения сети, сглаживающим фильтром с датчиком напряжения, инвертор напряжения, электродвигатель, обмотки которого подключены через блок датчиков фазных токов к выходу инвертора напряжения, задатчик текущей угловой скорости электродвигателя, регулятор частоты вращения, задатчик потокосцепления электродвигателя, наблюдательный блок состояния электропривода, сумматоры, координатный преобразователь напряжений, и блок деления, отличающийся тем, что электропривод снабжен вычислителем проекций вектора напряжения, формирователем проекций вектора напряжений, векторным модулятором, при этом наблюдательный блок состояния электропривода снабжен преобразователем фаз, вычислителем текущего значения потокосцепления, вычислителем текущего значения тока, вычислителем текущего значения угла вектора потокосцепления, вычислителем текущего значения электромагнитного момента, вычислителем модуля потокосцепления статора, вычислителем угловой скорости, блок формирователя проекций вектора напряжений снабжен первым, вторым, третьим, четвертым и пятым масштабным усилителем, сумматором, первым и вторым делителем, первым и вторым перемножителем, при этом задатчик текущей угловой скорости электродвигателя подключен к первому входу сумматора и пятому входу формирователя проекций вектора напряжений, а ко второму входу сумматора подключен четвертый выход наблюдательного блока состояния электропривода, выход сумматора подключен ко входу регулятор частоты вращения, выход которого подключен к первому входу сумматора и первому входу формирователя проекций вектора напряжений, второй вход сумматора подключен ко второму выходу наблюдательного блока состояния электропривода, а выход сумматора подключен ко второму входу формирователя проекций вектора напряжений, выход задатчика потокосцепления электродвигателя подключен к первому входу сумматора и третьему входу формирователя проекций вектора напряжений, второй вход сумматора подключен к третьему выходу наблюдательного блока состояния электропривода, выход сумматора подключен к четвертому входу формирователя проекций вектора напряжений, первый и второй выход формирователя проекций вектора напряжений соответственно подключен к первому и второму входам координатного преобразователя напряжений, третий вход которого соединен с первым выходом наблюдательного блока состояния электропривода, первый и второй выходы координатного преобразователя напряжений подключены соответственно к первому и второму входу векторного модулятора, третий вход которого подключен к датчику напряжения, первый выход к инвертору напряжения, а второй выход к первому входу вычислителя проекций вектора напряжения, второй вход которого подключен к датчику напряжения, а первый и второй выход к первому и второму входу наблюдательного блока состояния электропривода, третий и четвертый вход наблюдательного блока состояния электропривода подключены к блоку датчиков фазных токов, первый и второй вход наблюдательного блока состояния электропривода подключены соответственно к первому и второму входу вычислителя текущего значения потокосцепления, а третий и четвертый вход - к первому и второму входу преобразователя фаз, все выходы вычислителя текущего значения потокосцепления подключены в входам вычислителя текущего значения тока, при этом первый и второй выход также подключены ко входам вычислителя текущего значения угла вектора потокосцепления, первому и второму входу вычислителя текущего значения электромагнитного момента и ко входам вычислителя модуля потокосцепления статора, первый и второй выход преобразователя фаз подключены к третьему и четвертому входу вычислителя текущего значения электромагнитного момента и пятому и шестому входу вычислителя угловой скорости, первый и четвертый вход которого подключен к третьему и четвертому выходу вычислителя текущего значения потокосцепления, а второй и третий вход - к первому и второму выходу вычислителя текущего значения тока, к первому выходу наблюдательного блока состояния электропривода подключен выход вычислителя текущего значения угла вектора потокосцепления, ко второму выходу - выход вычислителя текущего значения электромагнитного момента, к третьему - выход вычислителя модуля потокосцепления статора, к четвертому - выход вычислителя угловой скорости, а также к третьему входу вычислителя текущего значения потокосцепления, четвертый вход блока формирователя проекций вектора напряжений подключен к входу первого масштабного усилителя и первому входу второго перемножителя, пятый вход блока формирователя проекций вектора напряжений подключен к первому входу первого перемножителя, второй вход блока формирователя проекций вектора напряжений подключен ко второму входу второго перемножителя и к входу четвертого масштабного усилителя, третий вход блока формирователя проекций вектора напряжений подключен ко входу третьего масштабного усилителя, второму входу первого перемножителя и второму входу первого делителя, а первый вход блока формирователя проекций вектора напряжений подключен к первому входу первого делителя, к первому входу сумматора подключен выход второго масштабного усилителя, вход которого подключен к выходу первого перемножителя, второй вход сумматора подключен к выходу второго делителя, первый и второй вход которого подключены к выходу второго перемножителя и третьего масштабного усилителя соответственно, третий вход сумматора подключен к выходу четвертого масштабного усилителя, четвертый вход сумматора подключен к выходу пятого масштабного усилителя, вход которого подключен к выходу первого делителя, первый выход блока формирователя проекций вектора напряжений подключен к выходу первого масштабного усилителя, в второй - к выходу сумматора.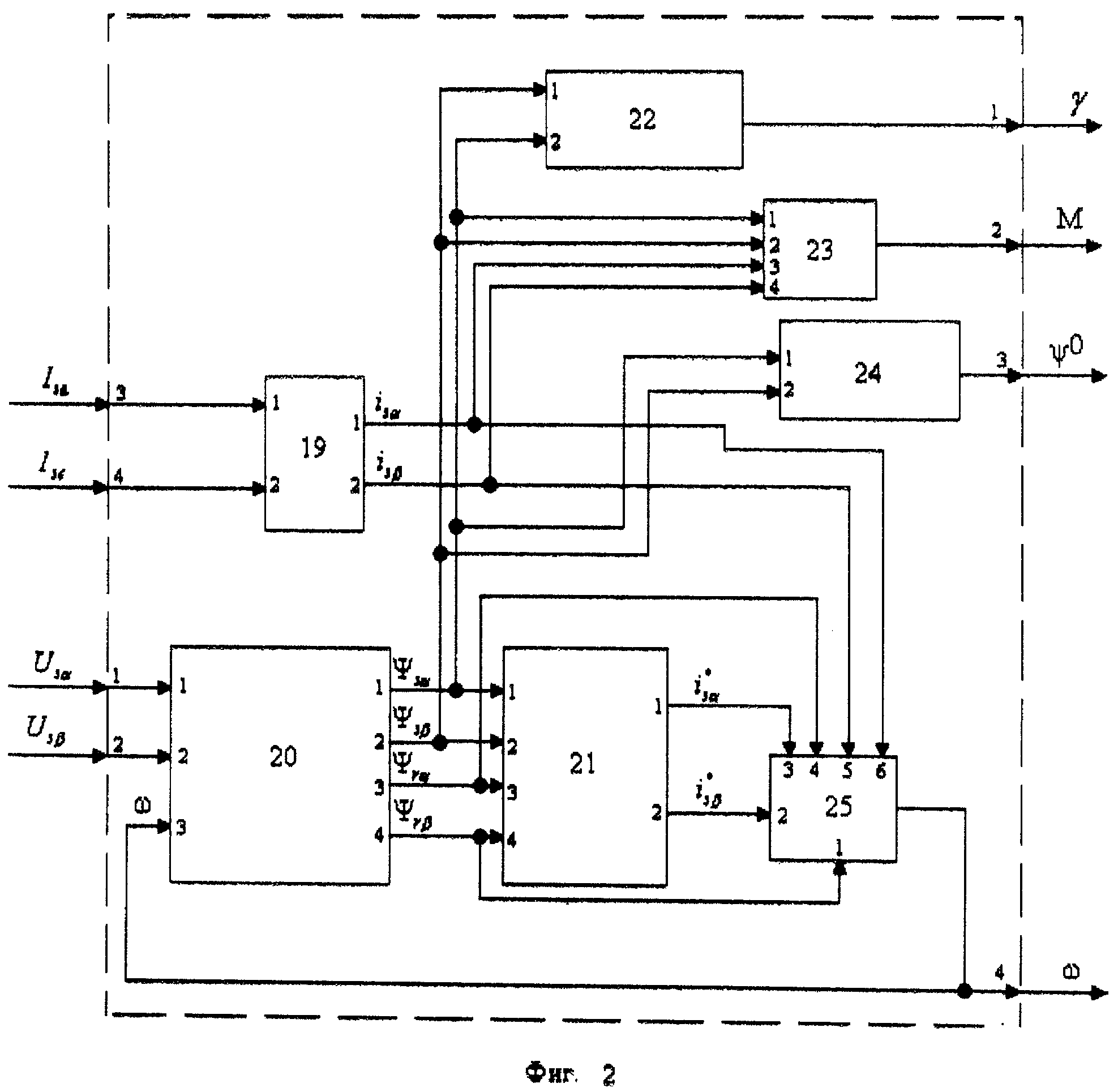
Установка для испытания материалов на прочность
Трехцепной скребковый конвейер
Скребковый конвейер с трехцепным тяговым органом
Способ охраны подготовительных выработок
Способ возведения искусственных опор в выработанном пространстве камер
Способ прокладки подземного трубопровода
Способ полной закладки очистных заходок нижних слоев при нисходящей выемке полезного ископаемого
Шнековая установка для добычи торфа
Секция подводного трубопровода
Способ защиты углеродной футеровки
Термонагружатель к стенду для испытания образцов материалов
Стенд для испытания образцов материалов при многоточечном изгибе
Устройство для испытания образцов материалов
Промежуточный линейный привод ленточного конвейера
Гидрофицированная крепь с регулируемым сопротивлением и рекуперацией энергии
Стенд для ударных испытаний
Стенд для испытания длинномерных образцов при многоточечном изгибе
Устройство компенсации высших гармоник и коррекции коэффициента мощности сети
Скребковый конвейер
Шахтная подъемная установка

