Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ФОРМИРОВАНИЯ ПСЕВДОДАЛЬНОСТИ НАВИГАЦИОННОГО СИГНАЛА
Вид РИД
Изобретение
Изобретение относится к области приборостроения и может найти применение в системах космической навигации для повышения точности имитаторов навигационных сигналов в части устранения погрешностей формирования сигналов между каналами.
Известен способ оценки среднеквадратичного отклонения (СКО) случайной составляющей погрешности временной задержки навигационных сингналов, формируемых контрольно-проверочным генератором МРК40 (стр.33-36 в Прецизионный измеритель временных характеристик генераторов навигационных сигналов космических навигационных спутников: доклад / В.П.Ильченко, В.Ю.Лебедев, В.И.Тисленко // Научная сессия ТУСУР-2010: Материалы докладов Всероссийской научно-технической конференции студентов, аспирантов и молодых ученых, Томск, 4-7 мая 2010 г. - Томск: В-Спектр, 2010. Ч.1. - 352 с.), состоящий в следующем.
Синхронизация цифрового осциллографа осуществлялась по сигналу «1 сек», поступающему от МРК40, который также используется для формирования навигационного сигнала (НС). Оценки временных задержек (по несущей частоте и дальномерному коду) выполнялись с использованием разработанного алгоритма при обработке реализации НС на интервале 1 мс. В качестве сигнала опорной частоты для аналого-цифрового преобразователя в цифровом осциллографе и МРК40 использовался сигнал «10 МГц», формируемый рубидиевым стандартом частоты.
Основным недостатком этого способа является высокий уровень сигнала, не менее минус 80 дБВт, данный уровень" сигнала достигается при использовании малошумящего усилителя, который вносит дополнительную неизвестную погрешность.
Наиболее близким к заявляемому является способ (RU №2318189, G01C 25/00), основанный на разделении суммарной погрешности измерений на погрешность в навигационной аппаратуре потребителя (НАП) и погрешность имитатора навигационных сигналов (ИНС).
Вначале производится измерение суммарных погрешностей НАП и ИНС. Устанавливается фаза сигнала ИНС для первой поверяемой точки. Линией задержки устанавливается исходная (нулевая) задержка τз=0 на частоте f, производится калибровка НАП. С равномерным шагом ϕ∂, последовательно устанавливаются дискретные значения фазы сигнала на выходе ИНС, равные второй, третьей и т.д. до последней K-й поверяемой точки его фазовой шкалы. С помощью НАП производятся измерения фазы сигнала во всех задаваемых точках.
Затем устанавливается фаза сигнала ИНС для первой поверяемой точки, и линией задержки вводится дополнительная задержка сигнала τз=α, величину которой целесообразно устанавливать по измерениям НАП, кратной величине приращения фазы сигнала ИНС (ϕ∂). На ИНС последовательно устанавливаются дискретные значения фазы сигнала, равные второй, третьей и т.д. до K-й точки. С помощью НАП производятся измерения фазы сигнала во всех задаваемых точках. Полученные экспериментальные зависимости при нулевой линии задержки и при задержке сигнала τз=α позволяют определить погрешности НАП и ИНС. Значения погрешностей при этом определяются для К дискретных значений фазы сигнала, задаваемых ИНС.
Основным недостатком этого способа является использование линии задержки, которая вносит дополнительную неизвестную погрешность, которая искажает псевдодальность сформированного навигационного сигнала
Задачей изобретения является определение погрешности формирования псевдодальности между каналами имитатора навигационных сигналов, исключая дополнительную неизвестную погрешность.
Поставленная задача решается тем, что в способе определения погрешности формирования псевдодальности навигационного сигнала, по которому устанавливают сигнал с несущей частотой fн, равной несущей частоте имитируемого навигационного космического аппарата, с помощью имитатора навигационных сигналов, измеряют значения задержек сигнала с помощью навигационной аппаратуры потребителя, определяют погрешности измерений путем определения разности задержек сигналов имитатора навигационных сигналов и задержек, измеренных навигационной аппаратурой потребителя, разделяют суммарную погрешность измерений на погрешность навигационной аппаратуры потребителя и погрешность имитатора навигационных сигналов, согласно изобретению в двух неизменных каналах навигационной аппаратуры потребителя определяют псевдодальности навигационных сигналов, сформированных в каждом из двух каналов имитатора навигационных сигналов по результатам измерений
 ,
,
 ,
,
где
 - псевдодальность навигационного сигнала ГЛОНАСС B-й литеры, формируемого M-м каналом имитатора навигационных сигналов;
- псевдодальность навигационного сигнала ГЛОНАСС B-й литеры, формируемого M-м каналом имитатора навигационных сигналов;
 - псевдодальность навигационного сигнала ГЛОНАСС A-й литеры, формируемого N-м каналом имитатора навигационных сигналов;
- псевдодальность навигационного сигнала ГЛОНАСС A-й литеры, формируемого N-м каналом имитатора навигационных сигналов;
 - псевдодальность навигационного сигнала ГЛОНАСС B-й литеры, формируемого N-м каналом имитатора навигационных сигналов;
- псевдодальность навигационного сигнала ГЛОНАСС B-й литеры, формируемого N-м каналом имитатора навигационных сигналов;
 - псевдодальность навигационного сигнала ГЛОНАСС A-й литеры, формируемого M-м каналом имитатора навигационных сигналов;
- псевдодальность навигационного сигнала ГЛОНАСС A-й литеры, формируемого M-м каналом имитатора навигационных сигналов;
 - псевдодальность навигационного сигнала ГЛОНАСС A-й литеры, принимаемого X-м каналом навигационной аппаратуры потребителя;
- псевдодальность навигационного сигнала ГЛОНАСС A-й литеры, принимаемого X-м каналом навигационной аппаратуры потребителя;
 - псевдодальность навигационного сигнала ГЛОНАСС B-й литеры, принимаемого Y-м каналом навигационной аппаратуры потребителя, с последующим определением погрешности формирования псевдодальности навигационного сигнала между указанными каналами имитатора навигационных сигналов из выражения:
- псевдодальность навигационного сигнала ГЛОНАСС B-й литеры, принимаемого Y-м каналом навигационной аппаратуры потребителя, с последующим определением погрешности формирования псевдодальности навигационного сигнала между указанными каналами имитатора навигационных сигналов из выражения:
 ,
,
где
 - задержки формирования сигнала в N-м канале имитатора;
- задержки формирования сигнала в N-м канале имитатора;
 - задержки формирования сигнала в M-м канале имитатора;
- задержки формирования сигнала в M-м канале имитатора;
 - разность между псевдодальностями навигационного сигнала ГЛОНАСС A-й литеры, формируемого N-м каналом имитатора навигационных сигналов и принимаемого X-м каналом навигационной аппаратуры потребителя;
- разность между псевдодальностями навигационного сигнала ГЛОНАСС A-й литеры, формируемого N-м каналом имитатора навигационных сигналов и принимаемого X-м каналом навигационной аппаратуры потребителя;
 - разность между псевдодальностями навигационного сигнала ГЛОНАСС B-й литеры, формируемого M-м каналом имитатора навигационных сигналов и принимаемого Y-м каналом навигационной аппаратуры потребителя;
- разность между псевдодальностями навигационного сигнала ГЛОНАСС B-й литеры, формируемого M-м каналом имитатора навигационных сигналов и принимаемого Y-м каналом навигационной аппаратуры потребителя;
 - разность между псевдодальностями навигационного сигнала ГЛОНАСС B-й литеры, формируемого N-м каналом имитатора навигационных сигналов и принимаемого Y-м каналом навигационной аппаратуры потребителя;
- разность между псевдодальностями навигационного сигнала ГЛОНАСС B-й литеры, формируемого N-м каналом имитатора навигационных сигналов и принимаемого Y-м каналом навигационной аппаратуры потребителя;
 - разность между псевдодальностями навигационного сигнала ГЛОНАСС A-й литеры, формируемого M-м каналом имитатора навигационных сигналов и принимаемого X-м каналом навигационной аппаратуры потребителя.
- разность между псевдодальностями навигационного сигнала ГЛОНАСС A-й литеры, формируемого M-м каналом имитатора навигационных сигналов и принимаемого X-м каналом навигационной аппаратуры потребителя.
На чертеже приведена схема экспериментальной установки для реализации предлагаемого способа.
С целью уменьшения влияния случайной составляющей погрешности формирования и определения псевдодальности навигационную аппаратуру потребителя и имитатор навигационных сигналов синхронизируют по частоте (например, 10 МГц) и секундной метке времени. Имитатор навигационных сигналов формирует 2 сигнала: A-й литеры ГЛОНАСС в N-м канале и B-й литеры ГЛОНАСС в M-м канале. Навигационная аппаратура потребителя осуществляет захват и сопровождение сигналов в Х-м и Y-м каналах соответственно.
Ниже приведена разность псевдодальности формируемых N-м каналом имитатора навигационных сигналов и принимаемого X-м каналом навигационной аппаратуры потребителя сигнала A-й литеры ГЛОНАСС.

где  - псевдодальность принимаемого навигационного сигнала A-й литеры ГЛОНАСС X-м каналом навигационной аппаратуры потребителя;
- псевдодальность принимаемого навигационного сигнала A-й литеры ГЛОНАСС X-м каналом навигационной аппаратуры потребителя;
 - псевдодальность формируемого навигационного сигнала A-й литеры ГЛОНАСС N-м каналом имитатора навигационных сигналов.
- псевдодальность формируемого навигационного сигнала A-й литеры ГЛОНАСС N-м каналом имитатора навигационных сигналов.
Подробнее рассмотрим  , которая состоит из литерной задержки для A-й литеры ГЛОНАСС в имитаторе навигационных сигналов
, которая состоит из литерной задержки для A-й литеры ГЛОНАСС в имитаторе навигационных сигналов  , литерной задержки для A-й литеры в навигационной аппаратуре потребителя
, литерной задержки для A-й литеры в навигационной аппаратуре потребителя  и задержки формирования сигнала имитатора навигационных сигналов в N-м канале
и задержки формирования сигнала имитатора навигационных сигналов в N-м канале  .
.

Далее рассмотрим разность формируемых M-м каналом имитатора навигационных сигналов и принимаемого Y-м каналом навигационной аппаратуры потребителя сигнала ГЛОНАСС B-й литеры.

где  - псевдодальность принимаемого навигационного сигнала B-й литеры ГЛОНАСС Y-м каналом навигационной аппаратуры потребителя;
- псевдодальность принимаемого навигационного сигнала B-й литеры ГЛОНАСС Y-м каналом навигационной аппаратуры потребителя;
 - псевдодальность формируемого навигационного сигнала B-й литеры ГЛОНАСС М-м каналом имитатора навигационных сигналов.
- псевдодальность формируемого навигационного сигнала B-й литеры ГЛОНАСС М-м каналом имитатора навигационных сигналов.
Подробнее рассмотрим  , которая состоит из литерной задержки для B-й литеры ГЛОНАСС в имитаторе навигационных сигналов
, которая состоит из литерной задержки для B-й литеры ГЛОНАСС в имитаторе навигационных сигналов  , литерной задержки для B-й литеры ГЛОНАСС в навигационной аппаратуре потребителя
, литерной задержки для B-й литеры ГЛОНАСС в навигационной аппаратуре потребителя  и задержки формирования сигнала имитатора навигационных сигналов в M-м канале
и задержки формирования сигнала имитатора навигационных сигналов в M-м канале  .
.

Далее меняем местами формируемые сигналы в имитаторе навигационных сигналов. N-й канал формирует ГЛОНАСС B-ю литеру:

а M-й канал формирует ГЛОНАСС A-ю литеру:

Распишем (5) и (6) подробнее:


Затем найдем разницу уравнений (2), (4)

и уравнений (5), (6)

Если сложить уравнения (9) и (10), получим удвоенную межканальную задержку имитатора навигационных сигналов между N-м и M-м каналами:


Т.е. разность между N-м и M-м каналами имитатора навигационных сигналов равна:

Из формулы (13) следует, что определена погрешность формирования псевдодальности между каналами имитатора навигационных сигналов без использования линии задержки.
По аналогии определяется погрешность формирования псевдодальности между каналами имитатора навигационных сигналов для остальных каналов.
Таким образом, предлагаемый способ позволяет определить погрешность формирования псевдодальности навигационного сигнала между каналами имитатора навигационных сигналов без использования линии задержки, т.е. исключив дополнительную неизвестную погрешность
Способ определения погрешности формирования псевдодальности навигационного сигнала, по которому устанавливают сигнал с несущей частотой f, равной несущей частоте имитируемого навигационного космического аппарата, с помощью имитатора навигационных сигналов, измеряют значения задержек сигнала с помощью навигационной аппаратуры потребителя, определяют погрешности измерений путем определения разности задержек сигналов имитатора навигационных сигналов и задержек, измеренных навигационной аппаратурой потребителя, разделяют суммарную погрешность измерений на погрешность навигационной аппаратуры потребителя и погрешность имитатора навигационных сигналов, отличающийся тем, что в двух неизменных каналах навигационной аппаратуры потребителя определяют псевдодальности навигационных сигналов, сформированных в каждом из двух каналов имитатора навигационных сигналов по результатам измерений где - псевдодальность навигационного сигнала ГЛОНАСС B-й литеры, формируемого M-м каналом имитатора навигационных сигналов; - псевдодальность навигационного сигнала ГЛОНАСС A-й литеры, формируемого N-м каналом имитатора навигационных сигналов; - псевдодальность навигационного сигнала ГЛОНАСС B-й литеры, формируемого N-м каналом имитатора навигационных сигналов; - псевдодальность навигационного сигнала ГЛОНАСС A-й литеры, формируемого M-м каналом имитатора навигационных сигналов; - псевдодальность навигационного сигнала ГЛОНАСС A-й литеры, принимаемого X-м каналом навигационной аппаратуры потребителя; - псевдодальность навигационного сигнала ГЛОНАСС B-й литеры, принимаемого Y-м каналом навигационной аппаратуры потребителя, с последующим определением погрешности формирования псевдодальности навигационного сигнала между указанными каналами имитатора навигационных сигналов из выражения: , где - задержки формирования сигнала в N-м канале имитатора; - задержки формирования сигнала в M-м канале имитатора; - разность между псевдодальностями навигационного сигнала ГЛОНАСС A-й литеры, формируемого N-м каналом имитатора навигационных сигналов и принимаемого X-м каналом навигационной аппаратуры потребителя; - разность между псевдодальностями навигационного сигнала ГЛОНАСС B-й литеры, формируемого M-м каналом имитатора навигационных сигналов и принимаемого Y-м каналом навигационной аппаратуры потребителя; - разность между псевдодальностями навигационного сигнала ГЛОНАСС B-й литеры, формируемого N-м каналом имитатора навигационных сигналов и принимаемого Y-м каналом навигационной аппаратуры потребителя; - разность между псевдодальностями навигационного сигнала ГЛОНАСС A-й литеры, формируемого M-м каналом имитатора навигационных сигналов и принимаемого X-м каналом навигационной аппаратуры потребителя.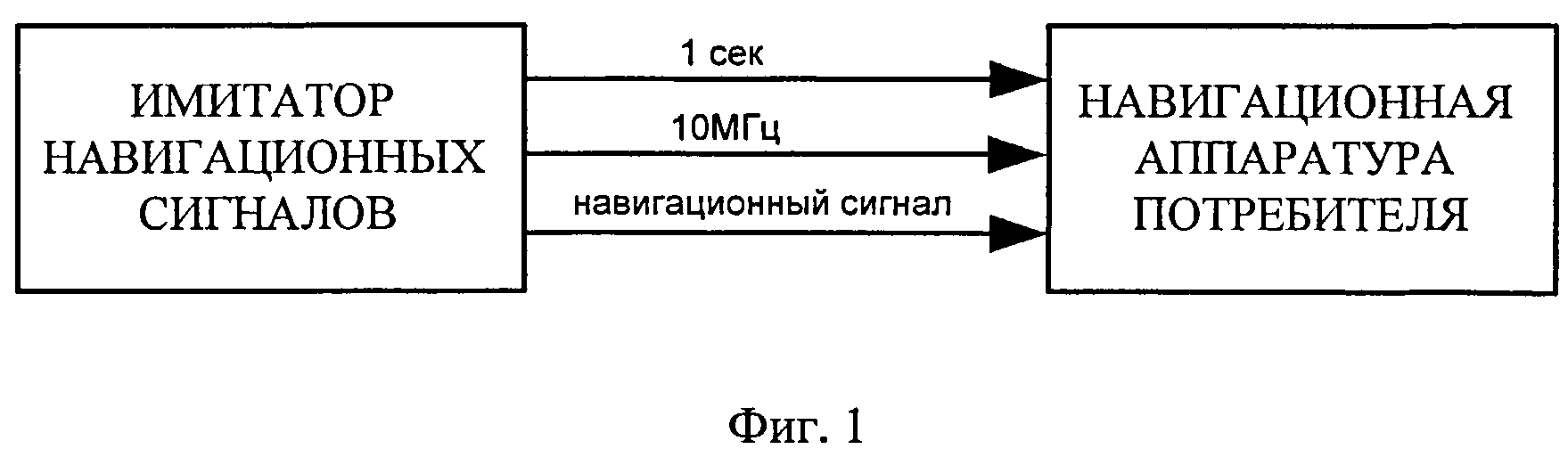
Индукционная канальная печь
Линейная индукционная машина
Способ угловой ориентации объекта по сигналам спутниковых радионавигационных систем
Способ подводного приема радиосигналов
Способ функционирования распределенных измерительно-управляющих систем
Фазовая радионавигационная система
Способ определения задержки сигналов навигационной спутниковой системы в ионосфере
Способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов

