Результат интеллектуальной деятельности: БЛОК ПРИЕМА И СИНХРОНИЗАЦИИ
Вид РИД
Изобретение
Предлагаемое техническое решение относится к приемному тракту радиолокационных или аналогичных систем и предназначено для обеспечения высокопроизводительной первичной цифровой обработки сигналов в реальном масштабе времени во всех режимах работы бортового радиолокационного комплекса и синхронизации работы входящих в него блоков.
В известной радиолокационной станции для вертолета [патент РФ №2206903, МПК G01S 13/00, 2001] обработка принимаемых сигналов ведется одним блоком, содержащим как аналоговую, так и цифровую часть, а обеспечение когерентного режима работы и синхронизация работы блоков ведется другим блоком - синхронизатором. Одним из основных требований к бортовому радиолокационному комплексу является обеспечение минимальных массогабаритных характеристик. В предлагаемом техническом решении функции обработки принимаемых сигналов и синхронизации приема объединены в одном устройстве, что значительно уменьшило габариты и вес бортового радиолокационного комплекса.
Известен радиолокационный приемник сложных сигналов [патент РФ №2033625, МПК G01S 7/292, 1991], содержащий регулируемый усилитель, два фазовых детектора, два аналого-цифровых преобразователя, три блока сравнения, блок селекции движущихся целей, ограничитель, фильтр сжатия, детектор, некогерентный накопитель, три фильтра нижних частот, синхронизатор, источник квадратурных колебаний, блок хранения констант и цифроаналоговый преобразователь. Предлагается улучшение помехозащищенности радиолокационного приемника путем вычитания постоянной составляющей на основе предварительной оценки уровня ложных тревог на фиксированном пороговом уровне. Для этого необходимо, чтобы заранее был известен уровень ложных тревог, что ограничивает практическое применение такого технического решения.
Известен цифровой блок обработки радиолокационных сигналов [патент РФ №2166771, МПК G01S 13/53, 1999], содержащий два фазовых детектора, два аналого-цифровых преобразователя, фазовращатель, управляемый гетеродин, блок быстрого преобразования Фурье, блок распознавания одного самолета, блок распознавания двух самолетов, блок распознавания трех самолетов, блок распознавания четырех самолетов, логический элемент И, четыре матричные цифровые устройства сравнения, девять матриц элементов И, четыре матричные постоянные запоминающие устройства, две матрицы элементов ИЛИ, блок выбора минимального значения, цифроаналоговый преобразователь, два световых табло, блок световых табло. В этом изобретении используется аналоговый метод переноса спектра сигнала на видеочастоту, который имеет следующие недостатки: не идентичность амплитудно-частотной и фазово-частотной характеристик, различие коэффициентов передачи квадратурных каналов, дрейф нуля и нелинейность фазового детектора, которые создают дополнительную неопределенность относительно количества разрешаемых воздушных целей и не компенсируются путем проверки совокупности гипотез на истинность в соответствии с критерием согласия 2 - Пирсона.
Известно радиоприемное устройство когерентной РЛС [патент РФ №2189054, МПК G01S 13/04, 2000], содержащее n-каналов приема, состоящих из аналогового сумматора, фазовращателя и приемника, гетеродина и цифровых сумматоров, где число n - четное, целое, определяется заданным увеличением линейного динамического диапазона приемного устройства в n раз. Таким образом, расширение линейного динамического диапазона приемного устройства достигается путем параллельного включения пар аналогичных приемников, что неприемлемо для бортового радиолокационного комплекса, где жесткие требования к массогабаритным характеристикам.
Наиболее близким по технической сущности к заявляемому техническому решению является приемное устройство радиолокатора бокового обзора с синтезированной апертурой [патент РФ №2032185, МПК G01S 13/90, 1989], содержащий смеситель, усилитель промежуточной частоты, задающий генератор промежуточной частоты, фазовые детекторы, гребенчатые фильтры, сумматор, синхронизатор, аналого-цифровые преобразователи, перемножители, цифроаналоговый преобразователь, цифровой гетеродин, широкополосный фазовращатель. Как указано в описании, данное приемное устройство позволяет повысить чувствительность при значительном расширении полосы пропускания, но различие коэффициентов передачи квадратурных каналов и не ортогональность опорных сигналов для фазовых детекторов приводит к искажению спектра сигнала и, в результате, собственный шум ограничивает чувствительность приемного устройства.
Технической задачей, на решение которой направлено предлагаемое изобретение, это повышение разрешающей способности по дальности бортового радиолокационного комплекса за счет улучшения распознавания принятых сигналов на фоне помех, а также обеспечение синхронизации работы бортового радиолокационного комплекса.
Эта задача решается тем, что блок приема и синхронизации содержит модуль синхронизации и n-приемных каналов, каждый из которых содержит усилитель промежуточной частоты, аналого-цифровой преобразователь, цифровой гетеродин и сумматор. В каждый приемный канал включены цифровой формирователь квадратур, устройство цифрового гетеродинирования, адаптер, оптимальный фильтр, фильтр боковых лепестков, коммутатор и формирователь выходных сигналов. В каждом приемном канале последовательно соединены усилитель промежуточной частоты, аналого-цифровой преобразователь, цифровой формирователь квадратур, устройство цифрового гетеродинирования и сумматор. Вход усилителя промежуточной частоты является входом приемного канала. Тактовые входы аналого-цифрового преобразователя и модуля синхронизации являются входами сигнала опорной частоты. Интерфейс специализированной цифровой вычислительной машины соединен с входами адаптера и модуля синхронизации. Первый выход адаптера через цифровой гетеродин соединен со вторым входом устройства цифрового гетеродинирования, второй выход адаптера соединен с управляющим входом сумматора, а третий - с управляющим входом коммутатора. Выход сумматора соединен с первым входом коммутатора, через оптимальный фильтр со вторым входом коммутатора и через фильтр боковых лепестков с третьим входом коммутатора, выход коммутатора соединен с входом формирователя выходных сигналов, выход которого является выходом приемного канала. Модуль синхронизации содержит устройство управления, формирователь тактовых импульсов и формирователь сигналов синхронизации блоков бортового радиолокационного комплекса. Первый вход устройства управления является входом модуля синхронизации, а второй вход - входом сигнала опорной частоты. Первый выход устройства управления соединен с тактовым входом адаптера, второй выход - с входом формирователя сигналов синхронизации, а третий выход - с входом формирователя тактовых импульсов. Первый, второй, третий, четвертый выходы формирователя сигналов синхронизация являются соответственно выходами сигнала управления фазовым манипулятором, сигнал управления задающим генератором, импульс запуска передатчика, импульс бланкирования высокочастотного приемника модуля синхронизации. Первый и второй выходы формирователя тактовых импульсов являются соответственно выходами тактового импульса задающего генератора и тактового импульса специализированной цифровой вычислительной машины модуля синхронизации.
Функциональная схема блока приема и синхронизации представлена на чертеже, с одним каналом блока приема и синхронизации, n-ые приемные каналы имеют аналогичную структуру и их количество зависит от тактических требований к бортовому радиолокационному комплексу.
Блок приема и синхронизации содержит усилитель промежуточной частоты 1, аналого-цифровой преобразователь 2, цифровой формирователь квадратур 3, устройство цифрового гетеродинирования 4, сумматор 5, цифровой гетеродин 6, адаптер 7, оптимальный фильтр 8, фильтр боковых лепестков 9, коммутатор 10, формирователь выходных сигналов 11, устройство управления 12, формирователь сигналов синхронизации 13, формирователь тактовых импульсов 14. Устройство управления 12, формирователь сигналов синхронизации 13 и формирователь тактовых импульсов 14 входят в состав модуля синхронизации 15.
Усилитель промежуточной частоты (УПЧ)1, аналого-цифровой преобразователь 2, цифровой формирователь квадратур 3, устройство цифрового гетеродинирования 4 и сумматор 5 последовательно соединены. Вход усилителя промежуточной частоты 1 является входом приемного канала блока приема и синхронизации. Тактовые входы аналого-цифрового преобразователя 2 и модуля синхронизации являются входами сигнала опорной частоты Fоп. Интерфейс специализированной цифровой вычислительной машины соединен с входами адаптера 7 и модуля синхронизации. Первый выход адаптера 7 через цифровой гетеродин 6 соединен со вторым входом устройства цифрового гетеродинирования 4, второй выход адаптера 7 соединен с управляющим входом сумматора 5, а третий - с управляющим входом коммутатора 10. Выход сумматора 5 соединен с первым входом коммутатора 10, через оптимальный фильтр 8 со вторым входом коммутатора 10 и через фильтр боковых лепестков 9 с третьим входом коммутатора 10, выход коммутатора 10 соединен с входом формирователя выходных сигналов 11, выход которого является выходом приемного канала блока приема и синхронизации. В модуле синхронизации первый вход устройства управления 12 является входом модуля синхронизации 15, а второй вход - входом сигнала опорной частоты Fоп. Первый выход устройства управления 12 соединен с тактовым входом адаптера 7, второй выход - с входом формирователя сигналов синхронизации 13, а третий выход - с входом формирователя тактовых импульсов 14. Первый, второй, третий, четвертый выходы формирователя сигналов синхронизация 13 являются соответственно выходами сигнала управления фазовым манипулятором Dπ, сигнала управления задающим генератором Ds, импульса запуска передатчика ИЗП, импульс бланкирования высокочастотного приемника ИБП модуля синхронизации 15.
Первый и второй выходы формирователя тактовых импульсов 14 являются соответственно выходами тактового импульса задающего генератора ТИ_G и тактового импульса специализированной цифровой вычислительной машины ТИ_S модуля синхронизации 15.
Рассмотрим работу блока приема и синхронизации на примере прохождения принимаемого сигнала по одному приемному каналу. Поскольку построение n-ых каналов идентично первому каналу, то прохождение принимаемого сигнала по ним будет аналогично.
Входной сигнал на второй промежуточной частоте Fпч2 с высокочастотного приемника (на чертеже не показано) поступает на вход усилитель промежуточной частоты 1, усилитель промежуточной частоты 1 обеспечивает необходимый уровень сигналов на входе аналого-цифрового преобразователя 2. С выхода усилителя промежуточной частоты 1 сигнал поступает на вход аналого-цифрового преобразователя 2, на тактовый вход которого поступает сигнал опорной частоты Fоп. С выхода аналого-цифрового преобразователя 2 сигнал в цифровой форме поступает на цифровой формирователь квадратур 3. С выхода цифрового формирователя квадратур 3 цифровые сигналы, соответствующие реальной и мнимой квадратурным составляющим сигнала, поступают на первый вход устройства цифрового гетеродинирования 4, на второй вход которого поступают цифровые сигналы, соответствующие реальной и мнимой квадратурным составляющим сигнала гетеродина с выхода цифрового гетеродина 6. Код частоты цифрового гетеродина 6 поступает с первого выхода адаптера 7. После гетеродинирования сигнал поступает на сумматор 5, где происходит суммирование отсчетов сигнала на интервале одного элемента дальности. Количество суммируемых выборок, задержка начала зоны приема относительно импульса начала отсчета, количество элементов дальности в зоне приема, задержка начала кадра относительно тактового импульса и размер кадра определяются соответствующими кодами, поступающими на управляющий вход сумматора 5 со второго выхода адаптера 7. После суммирования отсчетов сигнала в сумматоре 5 производится деление суммарного сигнала на количество суммируемых выборок (нормировка данных) и полученный сигнал поступает через коммутатор 10 на формирователь выходных сигналов 11, который обеспечивает передачу выходной цифровой информации в устройство вторичной обработки сигналов бортового радиолокационного комплекса по последовательным LVDS шинам (LVDS - Low-Voltage Differential Signaling). Коммутатор 10 обеспечивает прохождение сигнала с выхода сумматора 5 без фильтрации или через оптимальный фильтр 8, или, дополнительно, через фильтр боковых лепестков 9, в зависимости от поступающей команды с третьего выхода адаптера 7 на управляющий вход коммутатора 10.
Управление блоком приема и синхронизации производится специализированной цифровой вычислительной машиной по интерфейсу SMI (Serial Management Interface) через адаптер 7 и устройство управления 12. Интерфейс SMI представляет собой последовательную синхронную шину (сигналы mdc, mdio и шина GND), обеспечивающую доступ по записи и чтению к 16-разрядным регистрам устройств. Синхронизация работы приемных каналов обеспечивается тактовым импульсом и импульсом начала отсчета, поступающими из модуля синхронизации с первого выхода устройства управления 12 на тактовый вход адаптера 7. Со второго выхода устройства управления 12 поступают команды на вход формирователя сигналов синхронизации 13, который обеспечивает формирование сигналов управления блоками бортового радиолокационного комплекса: Dπ - сигнал управления фазовым манипулятором, Ds - сигнал управления задающим генератором, ИЗП - импульс запуска передатчика, ИБП - импульс бланкирования высокочастотного приемника. С третьего выхода устройства управления 12 поступают команды на вход формирователя тактовых импульсов 14, который обеспечивает формирование импульсов синхронизации бортового радиолокационного комплекса: ТИ_G - тактовый импульс задающего генератора, TH_S - тактовый импульс специализированной цифровой вычислительной машины. Более подробно построение формирователей приведено в описании к [патенту РФ №2304788, МПК G01S 7/285, 2006].
Для подтверждения возможности реализации технического решения было проведено макетирование модулей четырехканального блока приема и синхронизации с тактико-техническими характеристиками для конкретного бортового радиолокационного комплекса. Управление блоком приема и синхронизации осуществляется специализированной цифровой вычислительной машиной с использованием интерфейса SMI. Приемопередатчики интерфейса SMI адаптера и устройства управления модуля синхронизации реализованы на ПЛИС (программируемая логическая интегральная схема) и обеспечивают преобразование последовательного кода управляющей информации, поступающей по интерфейсу SMI в параллельный код управляющих сигналов. Усилители, аналого-цифровые преобразователи выбраны из промышленно выпускаемой элементной базы.
Цифровая обработка сигнала, поступающего с аналого-цифрового преобразователя 2, организована на базе ПЛИС и обеспечивает выполнение следующих операций: цифровое формирование квадратур входного сигнала, фильтрацию гармоник верхних частот, цифровое гетеродинирование, суммирование отсчетов сигнала на интервале одного элемента дальности и деление результата на количество суммирований (нормировка данных), оптимальную фильтрацию принятого сигнала и подавление боковых лепестков результатов сжатия оптимального фильтра. Передача данных блока приема и синхронизации производится через встроенный в ПЛИС передатчик данных LVDS. Одновременно передаются реальные и мнимые квадратуры принимаемого сигнала. Модуль синхронизации 15 также реализован на базе ПЛИС, что позволило обеспечить формирование сигналов синхронизации с уровнями, соответствующими стандарту Standart LVDS, и их передачу в блоки бортового радиолокационного комплекса по дифференциальным линиям связи с волновым сопротивлением (100±2) Ом, а также увеличить частоту входного опорного сигнала синхронизации до 112 МГЦ. Увеличение частоты входного опорного сигнала позволяет уменьшить дискрет перестройки периода зондирующих импульсов бортового радиолокационного комплекса до 1/112 мкс.
Для уменьшения массогабаритных характеристик блока приема и синхронизации в едином модуле стандарта «Евромеханика-3U» выполнены УПЧ двух каналов. Также в едином модуле выполнены аналого-цифровой преобразователь 2 и цифровые части двух каналов, при этом цифровой формирователь квадратур 3, устройство цифрового гетеродинирования 4, цифровой гетеродин 6, сумматор 5, адаптер 7, оптимальный фильтр 8, фильтр боковых лепестков 9, коммутатор 10 и формирователь выходных сигналов 11 для обоих каналов выполнены на одной ПЛИС. В едином модуле на одной ПЛИС выполнен модуль синхронизации, что значительно улучшило массогабаритные характеристики и позволило избавиться от паразитных наводок по сигнальным цепям. Источник питания выполнен, как единый модуль, по стандартной схеме в зависимости от требований к первичным системам электропитания.
Предлагаемое техническое решение позволило реализовать четырех канальный блок приема и синхронизации с выполнением вышеперечисленных функций в исполнении «Евромеханика» типоразмера 1ATR Short, состоящим из шести модулей стандарта 3U, при массе не более 8 кг.
Полученные характеристики на этапе макетирования подтверждают достижение технического результата предлагаемого изобретения. Блок приема и синхронизации обеспечивает преобразование широкополосных аналоговых сигналов в последовательности цифровых отсчетов с высокой точностью, формирование синусной и косинусной квадратурных составляющих оцифрованных сигналов с выхода каждого из приемных каналов бортового радиолокационного комплекса, подготовку первичной информации об обнаруженных и сопровождаемых объектах и выдачу ее в системы управления бортового радиолокационного комплекса, формирование сигналов, синхронизирующих работу блоков, входящих в состав бортового радиолокационного комплекса, и работу модулей, входящих в состав блока.
Блок приема и синхронизации, содержащий модуль синхронизации и n (n - целое число) приемных каналов, каждый из которых содержит усилитель промежуточной частоты, аналого-цифровой преобразователь, цифровой гетеродин и сумматор, отличающийся тем, что в каждый приемный канал введены цифровой формирователь квадратур, устройство цифрового гетеродинирования, адаптер, оптимальный фильтр, фильтр боковых лепестков, коммутатор и формирователь выходных сигналов, при этом усилитель промежуточной частоты, аналого-цифровой преобразователь, цифровой формирователь квадратур, устройство цифрового гетеродинирования и сумматор соединены последовательно, вход усилителя промежуточной частоты является входом приемного канала, тактовые входы аналого-цифрового преобразователя и модуля синхронизации являются входами сигнала опорной частоты, входы адаптера и модуля синхронизации являются входом интерфейса специализированной цифровой вычислительной машины, первый выход адаптера через цифровой гетеродин соединен со вторым входом устройства цифрового гетеродинирования, второй выход соединен с управляющим входом сумматора, а третий с управляющим входом коммутатора, выход сумматора соединен с первым входом коммутатора, через оптимальный фильтр со вторым входом коммутатора и через фильтр боковых лепестков с третьим входом коммутатора, выход коммутатора соединен с входом формирователя выходных сигналов, выход которого является выходом приемного канала, модуль синхронизации содержит устройство управления, формирователь тактовых импульсов и формирователь сигналов синхронизации, при этом первый вход устройства управления является входом модуля синхронизации, а второй вход является входом сигнала опорной частоты, первый выход устройства управления соединен с тактовым входом адаптера, второй выход соединен с входом формирователя сигналов синхронизации, а третий выход соединен с входом формирователя тактовых импульсов, первый, второй, третий, четвертый выходы формирователя сигналов синхронизации являются соответственно выходами сигнала управления фазовым манипулятором, сигнала управления задающим генератором, импульса запуска передатчика, импульса бланкирования высокочастотного приемника модуля синхронизации, первый и второй выходы формирователя тактовых импульсов являются соответственно выходами тактового импульса задающего генератора и тактового импульса специализированной цифровой вычислительной машины модуля синхронизации.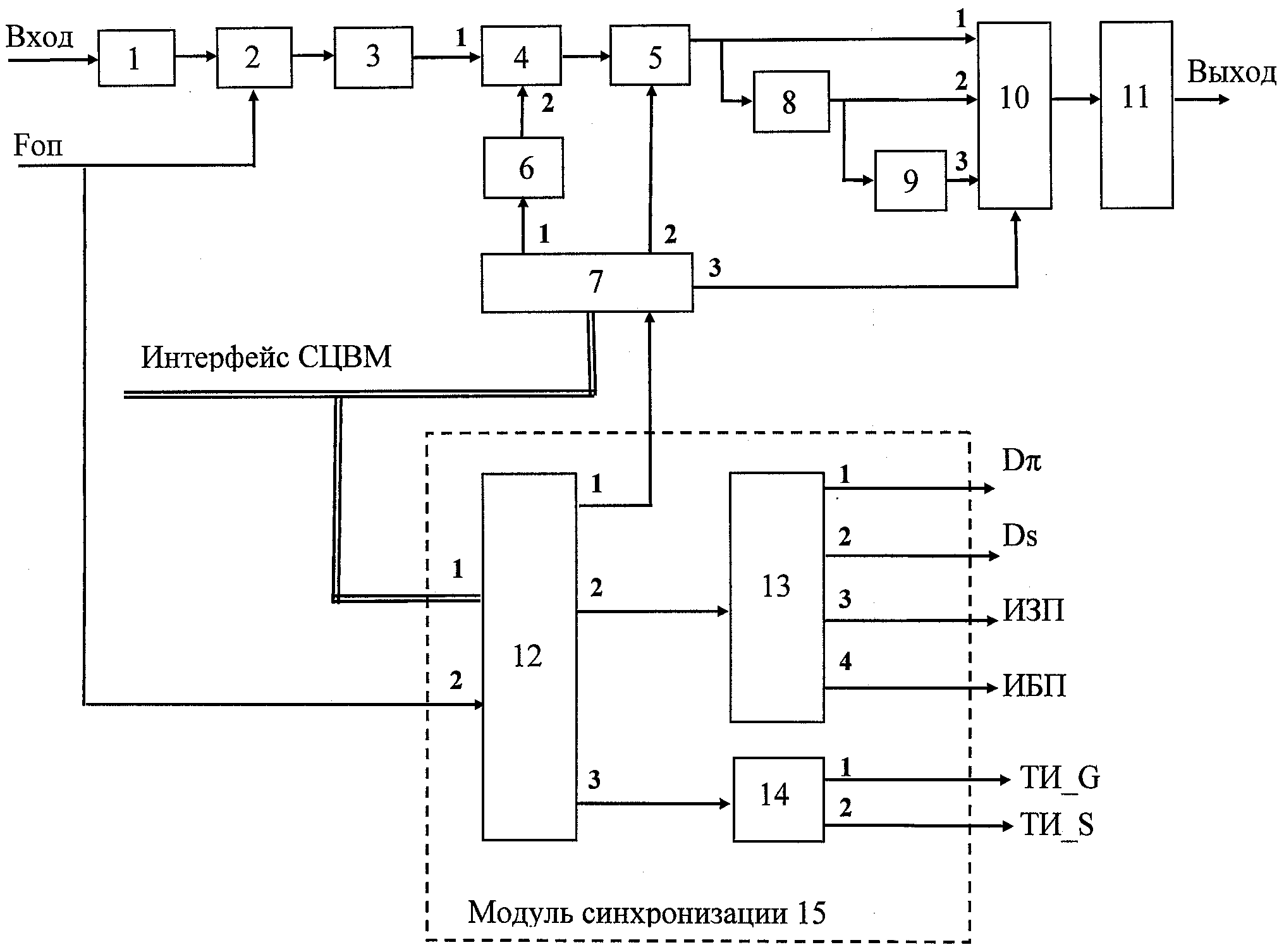
Способ прогнозирования остаточного ресурса подшипников качения по данным об их виброактивности
Способ сборки ракетного двигателя твердого топлива (рдтт) с газогенератором и сопловым блоком
Способ переработки мицелиальных отходов производства гентамицина сульфата
Гибкий защитный слой для подвижных и деформирующихся элементов конструкций
Доплеровский измеритель скорости космического аппарата
Колейный разборный мост для пропуска нагрузок легкой категории по массе
Способ наземной эксплуатации аккумуляторных батарей системы электропитания космического аппарата
Тренажер для обучения механика-водителя гусеничной машины
Устройство термостатирования бортовой аппаратуры полезного груза в составе космической головной части
Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата
Способ управления амплитудно-фазовым распределением на раскрыве фазированной антенной решетки
Способ оценки точности геометрической модели местности при ее автоматическом построении
Способ идентификации космических объектов искусственного происхождения в космическом пространстве
Вероятностная спутниковая система для мониторинга лесных пожаров
Радиолокатор с поляризационной селекцией
Когерентный приемник рлс с цифровым устройством для амплитудной и фазовой корректировки квадратурных составляющих принимаемого сигнала
Модуль синхронизации

