Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ (ПОЗИЦИОНИРОВАНИЯ) ГРУЗА, ПЕРЕМЕЩАЕМОГО ПОДЪЕМНЫМ МЕХАНИЗМОМ, НЕ ИМЕЮЩИМ СТАЦИОНАРНОГО ПОЛОЖЕНИЯ В ПРОСТРАНСТВЕ
Вид РИД
Изобретение
Изобретение относится к вариантам способа управления положением груза, перемещаемого подъемным механизмом, не имеющим стационарного положения в пространстве.
Известен способ предотвращения раскачивания груза на гибком подвесе при его подъеме стреловым грузоподъемным краном, заключающийся в том, что путем воздействия на органы управления краном инициируют формирование сигналов управления приводами механизмов перемещения стрелы и/или грузовой тележки и грузозахватного органа [1].
Недостатком данного способа является невозможность управления положением груза и позиционирования груза в область предполагаемого места посадки.
Из известных способов управления положением груза наиболее близким к заявленному является способ управления положением груза, перемещаемого подъемным механизмом, заключающийся в измерении положения груза, формировании управляющей информации с помощью компьютера и подаче команды управления на исполнительный механизм, в котором определение пространственного положения груза осуществляют посредством позиционно-чувствительной оптической системы, первый и второй детекторы которой, установленные на платформе, жестко закрепленной на грузе, ориентируют таким образом, чтобы их оптические оси были направлены соответственно на первую и вторую пары источников света, расположенных соответственно в области предполагаемого места посадки груза и на подъемном механизме в области подвески на нем груза, при этом платформу с грузом подводят к области предполагаемого места посадки до попадания первой пары источников света в поле зрения первого детектора и второй пары источников света в поле зрения второго детектора, преобразуют выходные сигналы детекторов в электрические величины, вычисляют на бортовом компьютере на основе полученных величин пространственное положение груза и по заданному алгоритму управления формируют команды на включение двигателей горизонтального перемещения груза, а вертикальное перемещение груза осуществляют программно с заранее заданной скоростью [2].
Недостатком данного способа являются его низкие функциональные возможности, обусловленные тем, что управление положением груза невозможно при использовании в качестве подъемного механизма устройства, не имеющего стационарного положения в пространстве, например, вертолета. Кроме того, использование оптической системы накладывает требования к геометрии груза, определяющей возможность оптической связи источника света и детектора.
Технический результат заключается в расширении функциональных возможностей, за счет организации иерархической структуры двухуровневого управления для четырехкоординатного позиционирования груза в пространстве.
Технический результат достигается тем, что в способе управления положением (позиционирования) груза, перемещаемого подъемным механизмом, не имеющим стационарного положения в пространстве, заключающемся в измерении положения груза, формировании управляющей информации с помощью компьютера и подаче команды управления на исполнительный механизм, в котором определение пространственного положения груза осуществляют посредством позиционно-чувствительной системы, детекторы которой, жестко закрепленные на грузе, ориентируют таким образом, чтобы их оси были направлены соответственно на источники, расположенные в области предполагаемого места посадки груза, при этом груз подводят к области предполагаемого места посадки до попадания источников в поле зрения детекторов, преобразуют выходные сигналы детекторов в электрические величины, по заданному алгоритму управления формируют команды горизонтального перемещения груза, а вертикальное перемещение груза осуществляют программно. Причем новым является то, что с целью расширения функциональных возможностей, дополнительно вводят верхний уровень управления, обеспечивающий стабилизацию положения подъемного механизма в заданной зоне работы нижнего уровня управления, за счет определения ошибок положения подъемного механизма относительно заданных границ монтажной зоны, которые отрабатывают посредством исполнительных устройств стабилизации подъемного механизма, для управления положением груза различной геометрической формы, на нижнем уровне управления положение груза оценивают системой наведения, посредством радиоизотопных меток и следящих детекторов.
Сущность изобретения поясняется чертежами 1-4, где:
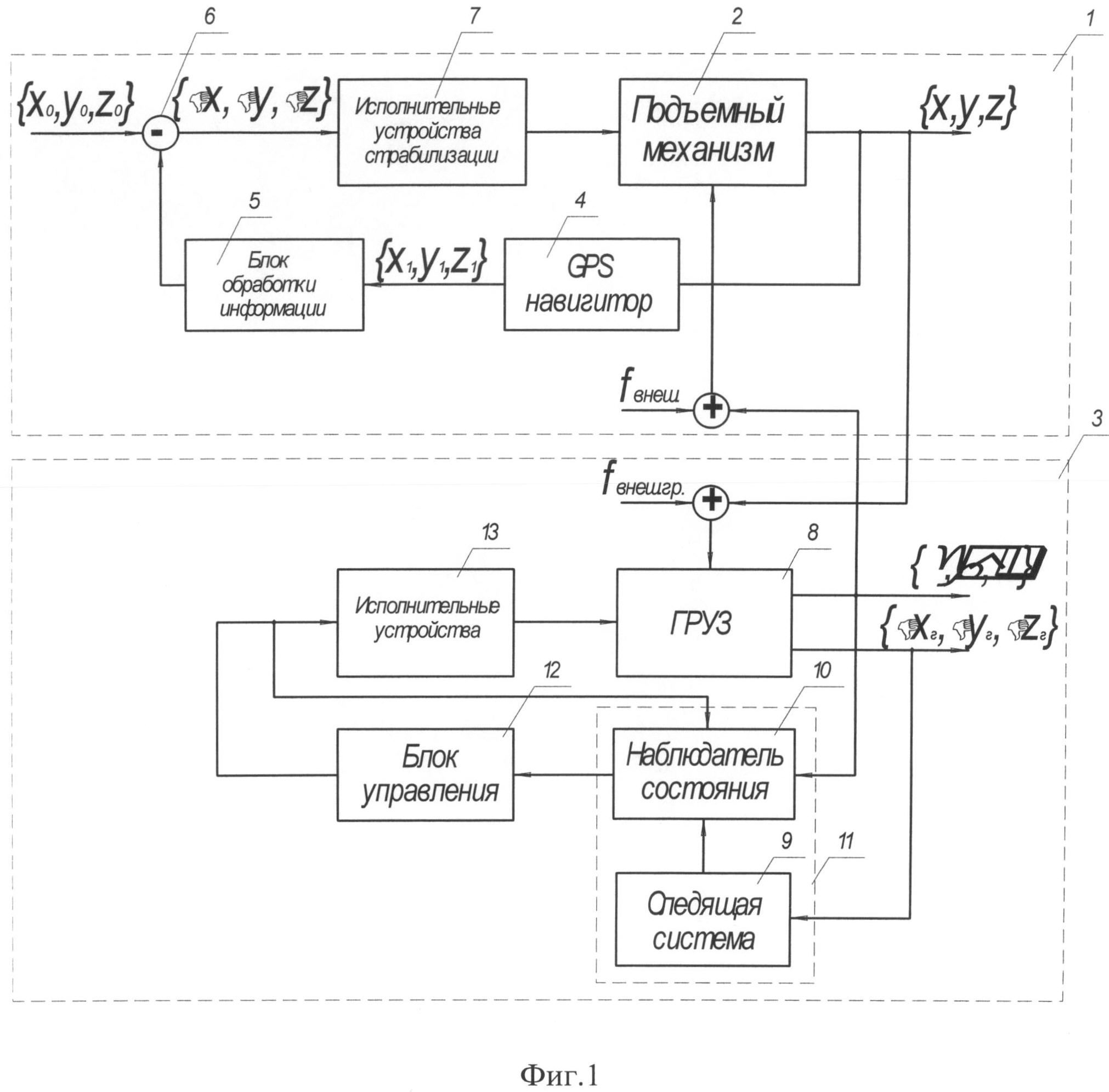
- на Фиг.1 представлена структурная схема иерархической структуры двухуровневого управления для управления положением (позиционирования) груза в пространстве;
- на Фиг.2 представлена функциональная схема работы следящей системы;
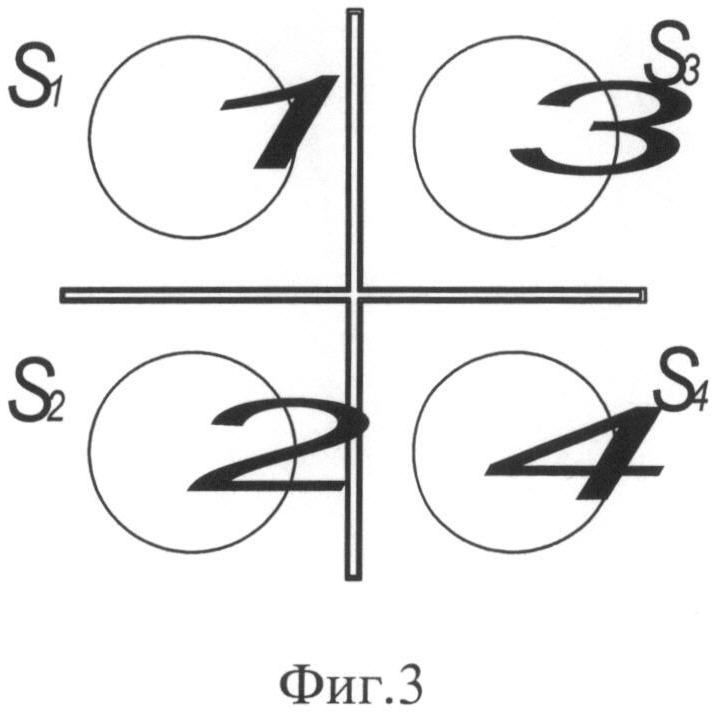
- на Фиг.3 представлена аналитическая схема приемника;
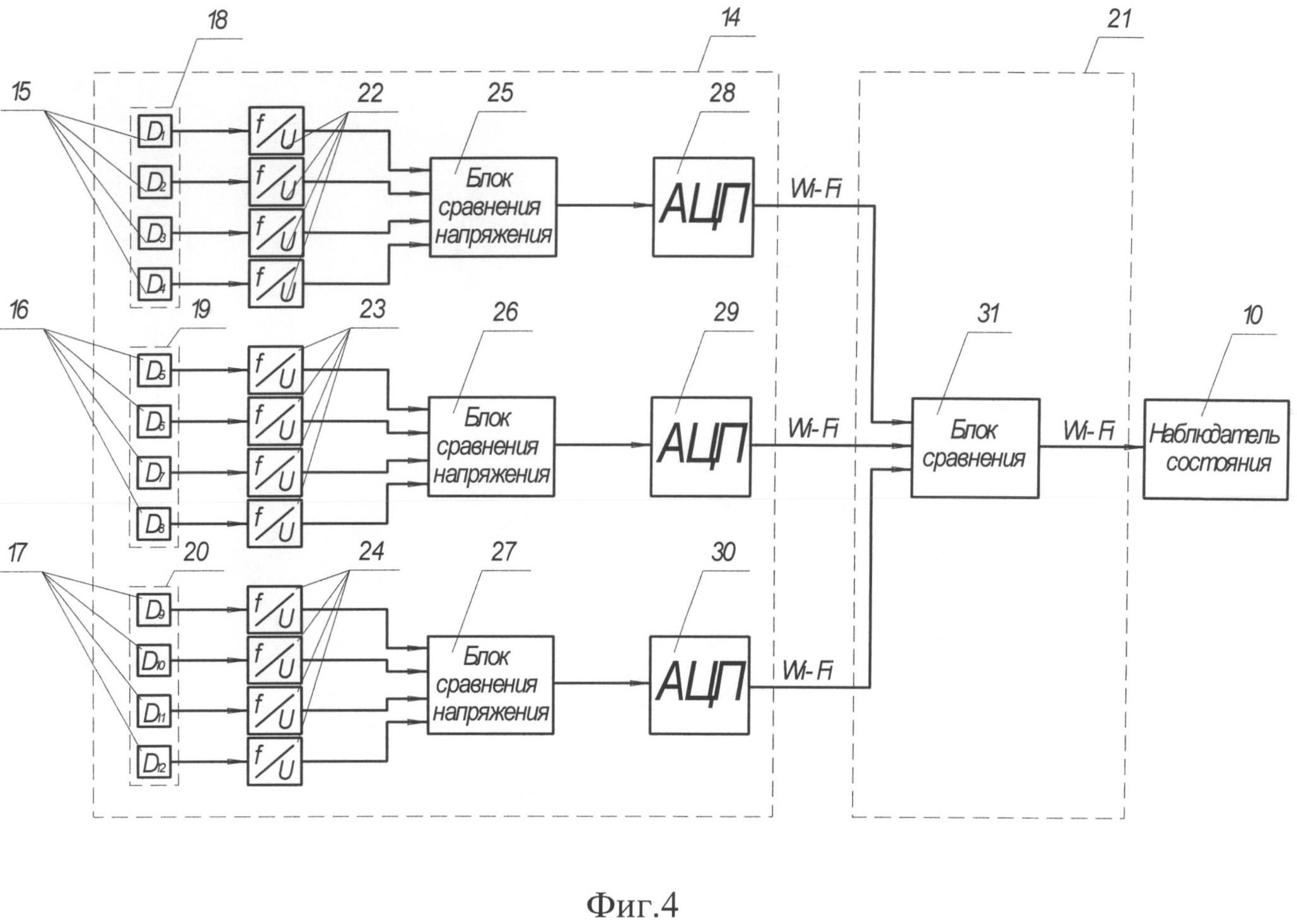
- на Фиг.4 представлена структурная схема следящей системы;
Иерархическая структура двухуровневого управления положением (позиционирования) груза, содержит:
1 - верхний уровень иерархической структуры управления;
2 - подъемный механизм;
3 - нижний уровень иерархической структуры управления;
4 - GPS/ГЛОНАСС навигатор;
5 - блок обработки информации;
6 - блок сравнения координат подъемного механизма;
7 - исполнительные устройства стабилизации подъемного механизма;
8 - груз;
9 - следящая система;
10 - наблюдатель состояния;
11 - система оценивания;
12 - блок управления;
13 - исполнительные устройства;
14 - нижний уровень логической организации следящей системы;
15, 16, 17 - детекторы гамма-излучения;
18, 19, 20 - приемники;
21 - верхний уровень логической организации следящей системы;
22, 23, 24 - преобразователи частота-напряжение;
25, 26, 27 - блоки сравнения напряжения;
28, 29, 30 - аналого-цифровые преобразователи;
31 - блок сравнения цифровых сигналов;
32 - платформы с излучающими метками;
33 - опора - проектное место установки груза.
Предлагаемый способ управления положением (позиционирования) груза, перемещаемого подъемным механизмом, не имеющим стационарного положения в пространстве, осуществляется следующим образом.
Основываясь на блочно-модульных принципах построения современных систем автоматического управления [3], предлагаемый способ можно представить в виде двухуровневой иерархической структуры [4], Фиг.1.
Первый - верхний уровень 1 иерархической структуры, содержит систему стабилизации положения подъемного механизма 2 в заданной зоне работы нижнего уровня 3.
На вход контура управления верхнего уровня 1 передают координаты положения {x0, y0, z0} проектной рабочей зоны, в рамках которой необходимо стабилизировать положение подъемного механизма 2, для реализации управления на нижнем уровне 3 структуры управления. Данные координаты задают вручную через интерфейс, согласно проектному месту установки груза.
Координаты местоположения подъемного механизма определяют с помощью GPS/ГЛОНАСС навигатора 4. Информацию с выхода контура управления {x, y, z} через блок обработки информации 5 передают на блок сравнения координат подъемного механизма 6. Далее блок сравнения координат подъемного механизма 6 определяет отклонение местоположения подъемного механизма 2 от заданных границ монтажной зоны, формируя разностные сигналы ошибки {Δx, Δy, Δz}={x-x0, y-y0, z-z0}. Ошибки местоположения подъемного механизма отрабатываются исполнительными устройствами стабилизации 7 подъемного механизма 2.
На подъемный механизм 2 в процессе стабилизации воздействуют возмущения, представляющие собой суммарное воздействие внешних и отклоняющих сил, действующих на груз при его перемещении и раскачке, не редко приводящих к гироскопической прецессии. Внешние возмущения создают ветровые нагрузки потока воздуха.
Позиционирование груза на нижнем уровне 3 производят за счет перемещения точки подвеса. Перемещение точки подвеса относительно центра масс подъемного механизма 2 приводит к изменению углов крена γ и тангажа ϑ подъемного механизма, а это ведет в свою очередь к смещению всей системы «подъемный механизм-груз» в заданном направлении. Для процесса стабилизации в штатном режиме исполнительные устройства стабилизации 7 подъемного механизма 2 обеспечивают инвариантную по отношению к внешним возмущениям стабилизацию положения подъемного механизма.
Второй - нижний уровень 3 иерархической структуры, представляет собой структуру автоматического позиционирования груза 8 в проектное место положения, при этом работа нижнего уровня 3 возможна при условии устойчивой работы верхнего уровня 1, по стабилизации подъемного механизма 2 в рабочей зоне установки груза.
Выходными переменными уровня 3 являются переменные положения груза {Δxг, Δyг, Δzг}, {γг, Ψг, ϑг}, где γг, Ψг, ϑг - углы Эйлера для груза (γ - крена, Ψ - рысканья, ϑ - тангажа).
Следящая система 9, построенная по принципу следящего перекрестия (Фиг.1), формирует сигналы ошибки положения груза {Δxг, Δyг, Δzг}, передает информацию о положении груза наблюдателю состояния 10, который также входит в состав системы оценивания 11. Наблюдатель состояния 10 восстанавливает недостающие для формирования управления компоненты полного вектора состояния.
В большинстве случаев невозможно измерить все переменные состояния, необходимые для реализации синтеза закона управления (скорость, ускорение и т.д.), те переменные состояния, которые не могут быть непосредственно измерены, должны быть оценены в результате некоторого наблюдения за поведением объекта [5]. Данную функцию выполняет наблюдатель состояния, имеющий ту же динамику, что и сама система, который в процессе оценивания состояния использует всю доступную информацию, т.е. измеренную информацию, входные сигналы и формирует полный вектор переменных состояния.
Основываясь на данных, полученных от системы оценки 11, блок управления 12, являющийся совокупностью обратных связей по переменным состояния, в соответствии с законом управления формирует управляющие воздействия на исполнительные устройства 13, которые представляют собой систему четырехкоординатного позиционирования груза, включающую систему управляемых сервоприводов, перемещающих точку подвеса груза до момента стабилизации положения и установки груза в проектное положение.
Следящую систему 9 строят на основе двухуровневой логической организации (Фиг.4). На нижнем уровне 14 оценивают разностные напряжения (сигналы ошибки) от детекторов 15, 16, 17 каждого приемника 18, 19, 20. На верхнем уровне 21 ведут оценку сигналов ошибки от трех приемников 18, 19, 20, расположенных на грузе таким образом, чтобы расстояние между первым и вторым было больше, чем между вторым и третьим, при условии расположения в линию (Фиг.2). Процессы оценивания на двух уровнях ведут непрерывно в течения всего времени монтажа, что позволяет с достоверностью определить местоположения груза.
Данные с детекторов 15, 16, 17 (Фиг.4) передают на преобразователи частоты в напряжение 22, 23, 24. Далее напряжения сравнивают в блоках сравнения напряжения 25, 26, 27, при этом формируют сигналы ошибки, которые после оцифровки в АЦП 28, 29, 30 посредством беспроводного канала связи (Wi-Fi), передают на верхний уровень 21, в частности на блок сравнения цифровых сигналов 31. Впоследствии сигналы ошибки верхнего уровня 21 передают системе-наблюдателю 10. Таким образом, формируют четкую информацию о положении груза в пространстве.
Каждый из приемников 18, 19, 20 состоит из метки 32 (Фиг.2), установленной на проектное место установки груза, направленной строго в сторону проведения монтажных работ и четырех детекторов 15, 16, 17 жесткозакрепленных непосредственно на поверхности груза, причем направлены строго в сторону предполагаемого расположения меток.
Метки 32 представляют собой материал радиоизотоп гамма-излучения малой интенсивности (Фиг.2), достаточной для проникновения излучения через груз, изготовленный из различных материалов, закрепленный на свинцовой площадке, для частичного гашения излучения в сторону, незадействованную в монтаже. Излучение от меток распространяется радиально во все стороны, при этом падение интенсивности излучения пропорционально расстоянию удаления от метки.
Приемники 18, 19, 20 представляют собой устройства, включающие четыре чувствительных сегмента (детектора), вмонтированных в свинцовые цилиндры (Фиг.4): I, II, III, IV. Каждый сегмент воспринимает информацию в угле 90°. Величина сигнала в сегменте i пропорциональна части площади объекта, попадающего в сегмент S этого сегмента.
К примеру, метка 32 находится немного левее и ниже направления движения приемника 18. В результате сумма сигналов метки 32, воспринимаемая приемником 18 по горизонтали (по углу места), демонстрирует следующее соотношение: S1+S3<S2+S4 (Фиг.3), что означает необходимость переместить приемник 18 ниже (чтобы уравнять сигналы в верхних и нижних цилиндрах приемника S1+S3=S2+S4). При этом величина управляющего сигнала равна по величине и противоположна по знаку разности сигналов в угломестной плоскости.
Сумма сигналов от цели, воспринимаемая приемником 18 по вертикали, демонстрирует соотношение: S1+S2>S3+S4, что означает необходимость переместить приемник 18 влево (чтобы уровнять сигналы в левых и правых цилиндрах приемника S1+S3=S2+S4). При этом величина управляющего сигнала равна по величине и противоположна по знаку разности сигналов в азимутальной плоскости: =-[(S1+S2)-(S3+S4)] [6].
Каждый из приемников 18, 19, 20 также включает в себя автономное питание, рассчитанное на несколько монтажных циклов. Рабочий интервал напряжения детекторов 15, 16, 17 достаточно велик, поэтому приемники 18, 19, 20 содержат преобразователи напряжения, а также микроконтроллеры, с помощью которых осуществляются все логические преобразования.
Предлагаемый способ управления положением (позиционирования) груза, перемещаемого подъемным механизмом, не имеющим стационарного положения в пространстве, позволяет расширить функциональные возможности способа за счет организации иерархической структуры двухуровневого управления для четырехкоординатного позиционирования груза в пространстве и использования радиоизотопных излучателей и детекторов, позволяющих управлять положением груза различной геометрической формы.
Таким образом, предлагаемый способ управления положением (позиционирования) груза, перемещаемого подъемным механизмом, не имеющим стационарного положения в пространстве, позволяет расширить функциональные возможности способа и управлять положением груза различной геометрической формы.
Литература
1. Патент №2406679 РФ. Способ предотвращения раскачивания груза на гибком подвесе (варианты) / В.А. Коровин, К.В. Коровин,. - 10 с.
2. Заявка на изобретение №95121443. Способ управления положением груза, перемещаемого подъемным механизмом / В.А. Фролов, И.М. Сидоров.
3. Современная прикладная теория управления // Монография под редакцией Колесникова А.А. (Часть III) «Новые классы регуляторов технических систем». - Москва-Таганрог, 2000 год. С.24-30.
4. Солодовников В.В., Плотников В.Н., Яковлев А.В. Теория автоматического управления техническими системами // Издательство МГТУ им. Н.Э Баумана. - Москва, 1993 год. С.446-448.
5. Подчукаев В.А. Теория автоматического управления (аналитические методы) // ФИЗМАТЛИТ. - М.: - 2004 год. С.252-262.
6. http://www.viktorova-ts.ru/page 136/page 144/index.html
Способ управления положением (позиционирования) груза, перемещаемого подъемным механизмом, не имеющим стационарного положения в пространстве, заключающийся в измерении положения груза, формировании управляющей информации с помощью компьютера и подаче команды управления на исполнительный механизм, в котором определение пространственного положения груза осуществляют посредством позиционно-чувствительной системы, детекторы которой, жестко закрепленные на грузе, ориентируют таким образом, чтобы их оси были направлены соответственно на источники, расположенные в области предполагаемого места посадки груза, при этом груз подводят к области предполагаемого места посадки до попадания источников в поле зрения детекторов, преобразуют выходные сигналы детекторов в электрические величины, по заданному алгоритму управления формируют команды горизонтального перемещения груза, а вертикальное перемещение груза осуществляют программно, отличающийся тем, что, с целью расширения функциональных возможностей, дополнительно вводят верхний уровень управления, обеспечивающий стабилизацию положения подъемного механизма в заданной зоне работы нижнего уровня управления, за счет определения ошибок положения подъемного механизма относительно заданных границ монтажной зоны, которые отрабатывают посредством исполнительных устройств стабилизации подъемного механизма, для управления положением груза различной геометрической формы на нижнем уровне управления положение груза оценивают системой наведения, посредством радиоизотопных меток и следящих детекторов.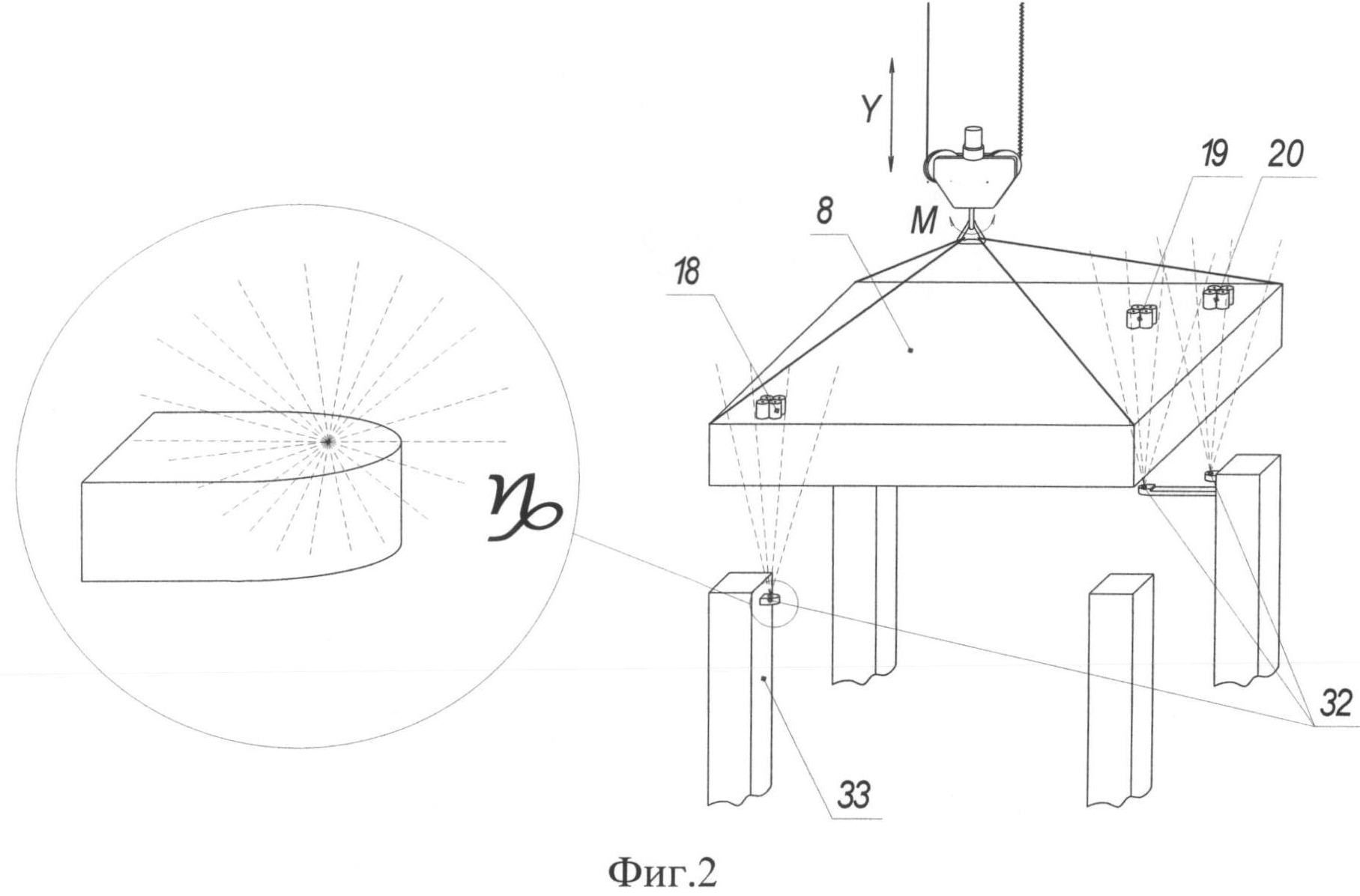
Способ формирования сигнала внешней подсветки при просмотре электронного изображения
Способ автоматизированного принятия решений по назначению деревьев в рубку при их обработке лесозаготовительной машиной
Способ разработки лесных территорий трасс нефтегазопроводов и лэп
Машина лесозаготовительная манипуляторного типа
Машина лесозаготовительная
Машина лесозаготовительная манипуляторного типа
Способ оценки силы нервной системы человека
Способ оценки силы нервных процессов человека
Способ испытания растительного покрова на участках трассы продуктопровода
Буферный магазин с универсальным отсекателем
Устройство для выгрузки плоских сплоточных единиц с воды на берег
Способ измерения формы листьев у древесных растений

