Результат интеллектуальной деятельности: СПОСОБ ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Заявляемые технические решения относятся к области радиолокации, в частности к области обнаружения радиолокационных целей обзорными радиолокационными станциями (РЛС) с узким лучом в условиях пассивных помех, создаваемых распределенными в пространстве отражателями.
Известен способ обнаружения радиолокационных целей, при котором в направлении зоны обзора излучают зондирующий сигнал, принятый затем из того же направления отраженный сигнал сравнивают с порогом обнаружения, при превышении которого принимают решение об обнаружении цели (Справочник по радиолокации. Под ред. М. Сколника. Пер. с англ. Под ред. К.Н. Трофимова. Том 1. Основы радиолокации. Под ред. Я.С. Ицхоки. М.: Сов. радио, 1976, с.180. Обнаружитель с фиксированным объемом выборки).
РЛС, реализующая известный способ, содержит передатчик, антенный переключатель, антенну, приемник, пороговое устройство, индикаторное устройство, синхронизатор, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом приемника, выход которого соединен со входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами индикаторного устройства, первый и второй выходы синхронизатора соединены соответственно с синхровходами передатчика и индикаторного устройства (Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. - М.: Сов. радио, 1970, стр.221).
В известных технических решениях обнаружение цели осуществляется в результате одного зондирования, поэтому любой сигнал, близкий по структуре к излученному сигналу, превысивший порог обнаружения, считается целью. К таким сигналам, в частности, относятся пассивные помехи. Таким образом, известный способ не обеспечивает защиту РЛС от пассивных помех.
Наиболее близким к заявляемому является способ обнаружения радиолокационных целей, включающий двухэтапное обнаружение сигнала в направлении зоны обзора, при котором в каждом направлении зоны обзора излучают зондирующий сигнал первого этапа обнаружения, при обнаружении отраженного сигнала на первом этапе обнаружения в том же направлении зоны обзора излучают зондирующий сигнал второго этапа обнаружения, принимают решение об обнаружении цели, если отраженный сигнал второго этапа обнаружен в пределах строба, рассчитанного по результатам обнаружения сигнала на первом этапе с учетом возможного перемещения цели за время между излучениями зондирующих сигналов на этапах обнаружения и ошибок измерения координат (Справочник по радиолокации. Под ред. М. Сколника. Пер. с англ. Под ред. К.Н. Трофимова. Том 1. Основы радиолокации. Под ред. Я.С. Ицхоки. М.: Сов. радио, 1976, с.200).
Наиболее близкий способ позволяет осуществлять обнаружение радиолокационных целей в условиях распределенных в пространстве пассивных помех, создаваемых облаками отражателей радиосигналов, например, в виде метеорологических образований (облака, дождь, туман и т.п.). Способ основан на том, что сигналы, отраженные от распределенных, в пространстве отражателей, суммируются случайным образом и обнаруживаются РЛС в виде так называемых «блестящих точек», которые и являются пассивными помехами для РЛС. Положение «блестящих точек» в пространстве изменяется с течением времени за счет неравномерного перемещения отражателей из-за движения воздуха, поэтому при двухэтапном обнаружении такие «блестящие точки», обнаруженные на первом этапе, часто не обнаруживаются на втором этапе в пределах строба, рассчитанного с учетом возможного перемещения цели за время между излучениями зондирующих сигналов на этапах обнаружения и ошибок измерения координат, то есть пассивная помеха оказывается подавленной.
Поскольку время между излучениями зондирующих сигналов на этапах обнаружения устанавливают достаточно малым (равным длительность периода зондирующего импульса), то угловые границы строба второго этапа обнаружения совпадают с угловыми границами первого этапа и равны границам одного направления зоны обзора первого этапа (двухэтапная обработка «в луче»).
Дальняя (RД) и ближняя (RБ) границы строба второго этапа обнаружения вычисляются в соответствии с формулой:


где RС - дальность обнаружения отраженного сигнала на первом этапе обнаружения;
vRmax - максимальная радиальная скорость цели из класса целей, заданных для РЛС;
τ - время между излучениями зондирующих сигналов на этапах обнаружения;
σR - среднеквадратическое отклонение измерения дальности;
ΔRдопл - доплеровский сдвиг радиальной скорости цели.
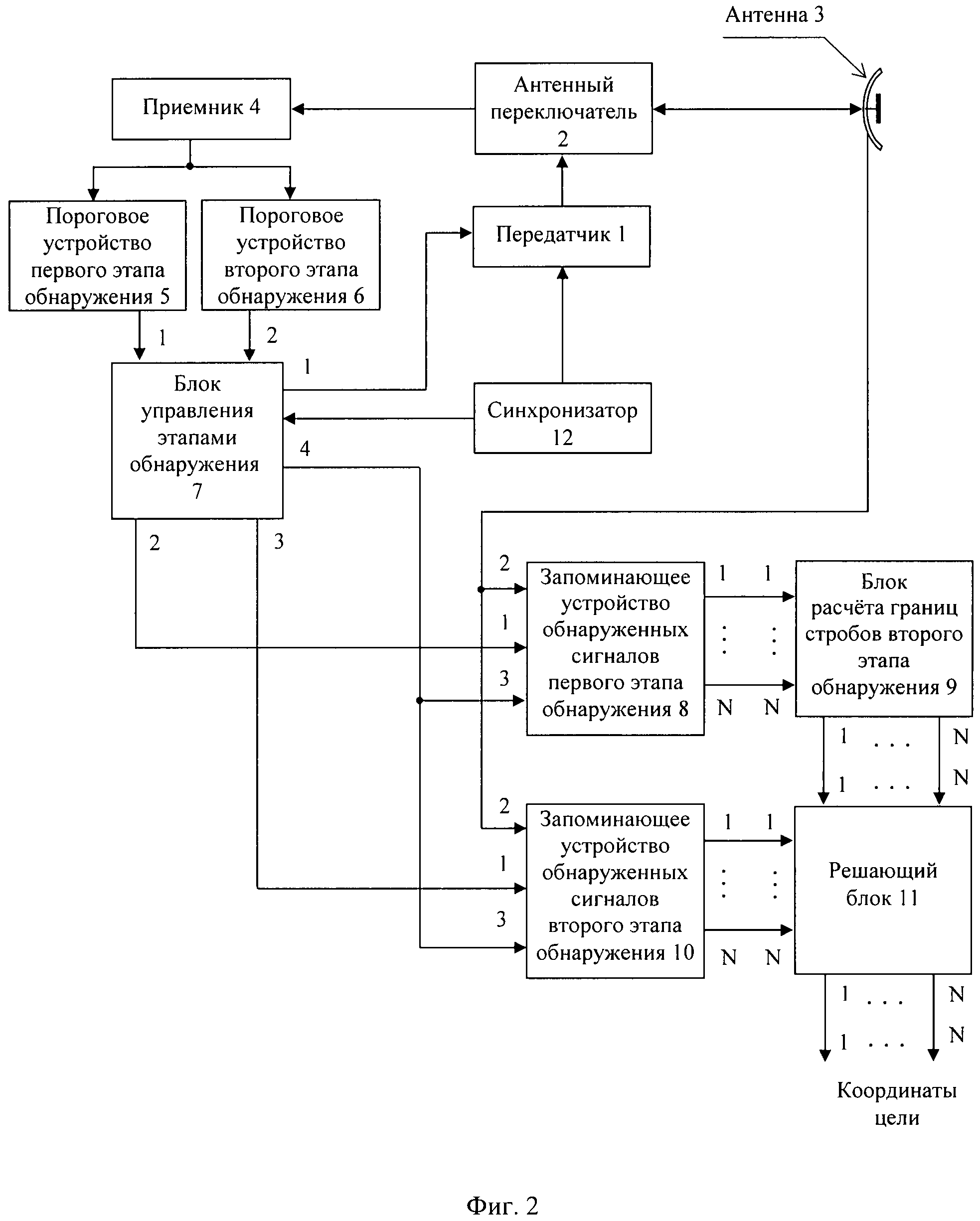
РЛС, в которой реализован наиболее близкий способ (фиг.2), содержит передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство первого этапа обнаружения 5, пороговое устройство второго этапа обнаружения 6, блок управления этапами обнаружения 7, запоминающее устройство обнаруженных сигналов первого этапа обнаружения 8, блок расчета границ стробов второго этапа обнаружения 9, запоминающее устройство обнаруженных сигналов второго этапа обнаружения 10, решающий блок 11, синхронизатор 12, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен с входом порогового устройства первого этапа обнаружения 5 и входом порогового устройства второго этапа обнаружения 6, выход порогового устройства первого этапа обнаружения 5 и выход порогового устройства второго этапа обнаружения 6 соединены с первым и вторым входами блока управления этапами обнаружения 7 соответственно, первый, второй, третий и четвертый выходы этого блока соединены соответственно с первым управляющим входом передатчика 1, первым входом запоминающего устройства обнаруженных сигналов первого этапа обнаружения 8, первым входом запоминающего устройства обнаруженных сигналов второго этапа обнаружения 10 и третьими входами этих запоминающих устройств соответственно, N выходов запоминающего устройства обнаруженных сигналов первого этапа обнаружения 8 соединены с N входами блока расчета границ стробов второго этапа обнаружения 9, N выходов блока расчета границ стробов второго этапа обнаружения 9 и N выходов запоминающего устройства обнаруженных сигналов второго этапа обнаружения 10 соединены соответственно с первой группой из N входов и второй группой из N входов решающего блока 11, N выходов которого являются выходом РЛС, выходы синхронизатора 12 соединены с синхровходом передатчика 1 и синхровходом блока управления этапами обнаружения 7.
РЛС, реализующая наиболее близкий способ, работает следующим образом.
В передатчике 1 по командам синхронизатора 12 (импульсам синхронизации) формируется зондирующий сигнал первого этапа обнаружения, который в процессе обзора пространства с помощью антенны 3 излучается в очередное направление зоны обзора. Отраженный сигнал принимается антенной 3, поступает в приемник 4, где фильтруется, усиливается. С выхода приемника 4 сигнал подается на входы двух пороговых устройств - порогового устройства первого этапа обнаружения 5 и порогового устройства второго этапа обнаружения 6, где сравнивается с порогами первого и второго этапов обнаружения соответственно. Сигналы, превысившие первый и второй пороги обнаружения, с выходов пороговых устройств обнаружения 5 и 6 поступают соответственно на первый и второй входы блока управления этапами обнаружения 7, где вычисляется соответствующие этим сигналам дальности. В случае обнаружения сигнала на первом этапе обнаружения в блоке управления этапами обнаружения 7 формируется команда на излучение зондирующего сигнала второго этапа обнаружения, которая с первого выхода выдается на управляющий вход передатчика 1. Сигналы с выхода устройства порогового обнаружения второго этапа 6 при этом запрещаются (блокируются). Обнаруженные сигналы первого этапа обнаружения со второго выхода блока управления этапами обнаружения 7 поступают на первый вход запоминающего устройства обнаруженных сигналов первого этапа обнаружения 8, где запоминаются их амплитуды, координаты дальности и угловые координаты, поступающие на второй вход этого запоминающего устройства с координатного выхода антенны 3.
Обнаруженные сигналы второго этапа обнаружения с выхода порогового устройства второго этапа обнаружения 6 поступают на второй вход блока управления этапами обнаружения 7, при этом сигналы с выхода порогового устройства первого этапа обнаружения 5 блокируются. Обнаруженные сигналы второго этапа обнаружения с третьего выхода блока управления этапами обнаружения 7 поступают на первый вход запоминающего устройства обнаруженных сигналов второго этапа обнаружения 10, где запоминаются их амплитуды, координаты дальности и угловые координаты, поступающие на второй вход этого запоминающего устройства с координатного выхода антенны 3.
По окончании второго этапа обнаружения в блоке управления этапами обнаружения 7 формируется команда на обработку принятых сигналов, для чего с четвертого выхода блока управления этапами обнаружения 7 на третий вход запоминающего устройства обнаруженных сигналов первого этапа обнаружения 8 и на третий вход запоминающего устройства обнаруженных сигналов второго этапа обнаружения 10 выдается сигнал, по которому с N выходов запоминающего устройства обнаруженных сигналов первого этапа обнаружения 8 на N входов блока расчета границ стробов второго этапа обнаружения 9 выдаются амплитуды и координаты сигналов, обнаруженных на первом этапе обнаружения, а с N выходов запоминающего устройства обнаруженных сигналов второго этапа обнаружения 10 на вторую группу из N входов решающего блока 11 выдаются амплитуды и координаты сигналов, обнаруженных на втором этапе обнаружения. В блоке расчета границ стробов второго этапа обнаружения 9 вокруг координат сигналов, обнаруженных на первом этапе, вычисляются границы стробов по дальности в соответствии с формулой (1). Вычисленные границы стробов с N выходов подаются на первую группу из N входов решающего блока 11. В решающем блоке 11 для каждого из N направлений, в которых произошло обнаружение сигналов на первом этапе обнаружения, проверяется наличие сигналов второго этапа обнаружения в границах стробов, вычисленных в блоке расчета границ стробов второго этапа обнаружения 9. Сигналы, обнаруженные в упомянутых стробах, считаются сигналами от целей и их амплитуды и координаты выдаются потребителю радиолокационной информации.
Недостаток наиболее близких технических решений состоит в следующем.
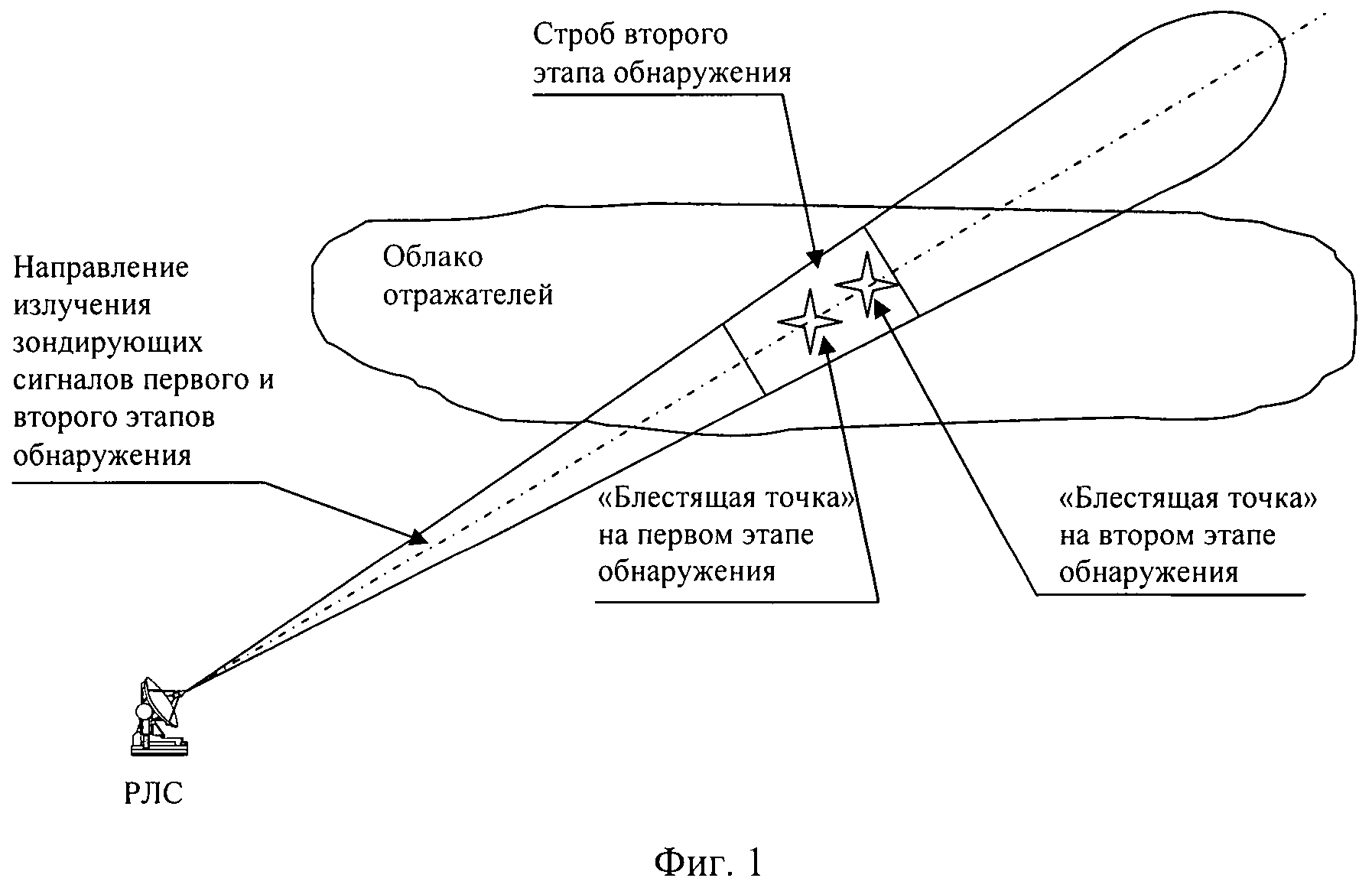
Если за время между излучениями зондирующих сигналов на этапах обнаружения пространственное положение распределенных отражателей изменилось незначительно, то отраженные сигналы («блестящие точки») на втором этапе обнаружения обнаруживаются в пределах строба, рассчитанного по результатам обнаружения первого этапа (фиг.1). Обнаруженные таким образом на двух этапах помехи принимаются за сигналы от цели и подавление помех не происходит.
Решаемой задачей (техническим результатом), таким образом, является увеличение подавления распределенных пассивных помех при двухэтапном обнаружении сигналов.
Указанный технический результат достигается тем, что в способе обнаружения радиолокационных целей, включающем двухэтапное обнаружение сигнала в направлении зоны обзора, при котором в каждом направлении зоны обзора излучают зондирующий сигнал первого этапа обнаружения, при обнаружении отраженного сигнала на первом этапе обнаружения излучают зондирующий сигнал второго этапа обнаружения, принимают решение об обнаружении цели, если отраженный сигнал второго этапа обнаружен в пределах строба, рассчитанного по результатам обнаружения сигнала на первом этапе с учетом возможного перемещения цели за время между излучениями зондирующих сигналов на этапах обнаружения и ошибок измерения координат, согласно изобретению, изменяют направление излучения зондирующего сигнала второго этапа обнаружения относительно направления излучения зондирующего сигнала первого этапа обнаружения по одной или по обеим угловым координатам, при этом величину указанного изменения устанавливают исходя из допустимых потерь в обнаружении цели.
Указанный технический результат достигается также тем, что изменяют направление излучения зондирующего сигнала второго этапа обнаружения относительно направления излучения зондирующего сигнала первого этапа обнаружения по одной или по обеим угловым координатам не более, чем на 10% от соответствующей ширины луча по уровню половинной мощности.
Указанный технический результат достигается также тем, что в РЛС, содержащей передатчик, антенный переключатель, антенну, приемник, пороговое устройство первого этапа обнаружения, пороговое устройство второго этапа обнаружения, блок управления этапами обнаружения, запоминающее устройство обнаруженных сигналов первого этапа обнаружения, блок расчета границ стробов второго этапа обнаружения, запоминающее устройство обнаруженных сигналов второго этапа обнаружения, решающий блок, синхронизатор, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом приемника, выход которого соединен с входом порогового устройства первого этапа обнаружения и входом порогового устройства второго этапа обнаружения, выход порогового устройства первого этапа обнаружения и выход порогового устройства второго этапа обнаружения соединены с первым и вторым входами блока управления этапами обнаружения соответственно, первый, второй, третий и четвертый выходы этого блока соединены соответственно с первым управляющим входом передатчика, первым входом запоминающего устройства обнаруженных сигналов первого этапа обнаружения, первым входом запоминающего устройства обнаруженных сигналов второго этапа обнаружения и третьими входами этих запоминающих устройств соответственно, N выходов запоминающего устройства обнаруженных сигналов первого этапа обнаружения соединены с N входами блока расчета границ стробов второго этапа обнаружения, N выходов блока расчета границ стробов второго этапа обнаружения и N выходов запоминающего устройства обнаруженных сигналов второго этапа обнаружения соединены соответственно с первой группой из N входов и второй группой из N входов решающего блока, N выходов которого являются выходом РЛС, выходы синхронизатора соединены с синхровходом передатчика и синхровходом блока управления этапами обнаружения, согласно изобретению, введен блок управления направлением излучения зондирующего сигнала второго этапа обнаружения, вход которого соединен с первым выходом блока управления этапами обнаружения, а выход - с управляющим входом антенны.
Суть заявляемых технических решений заключается в следующем.
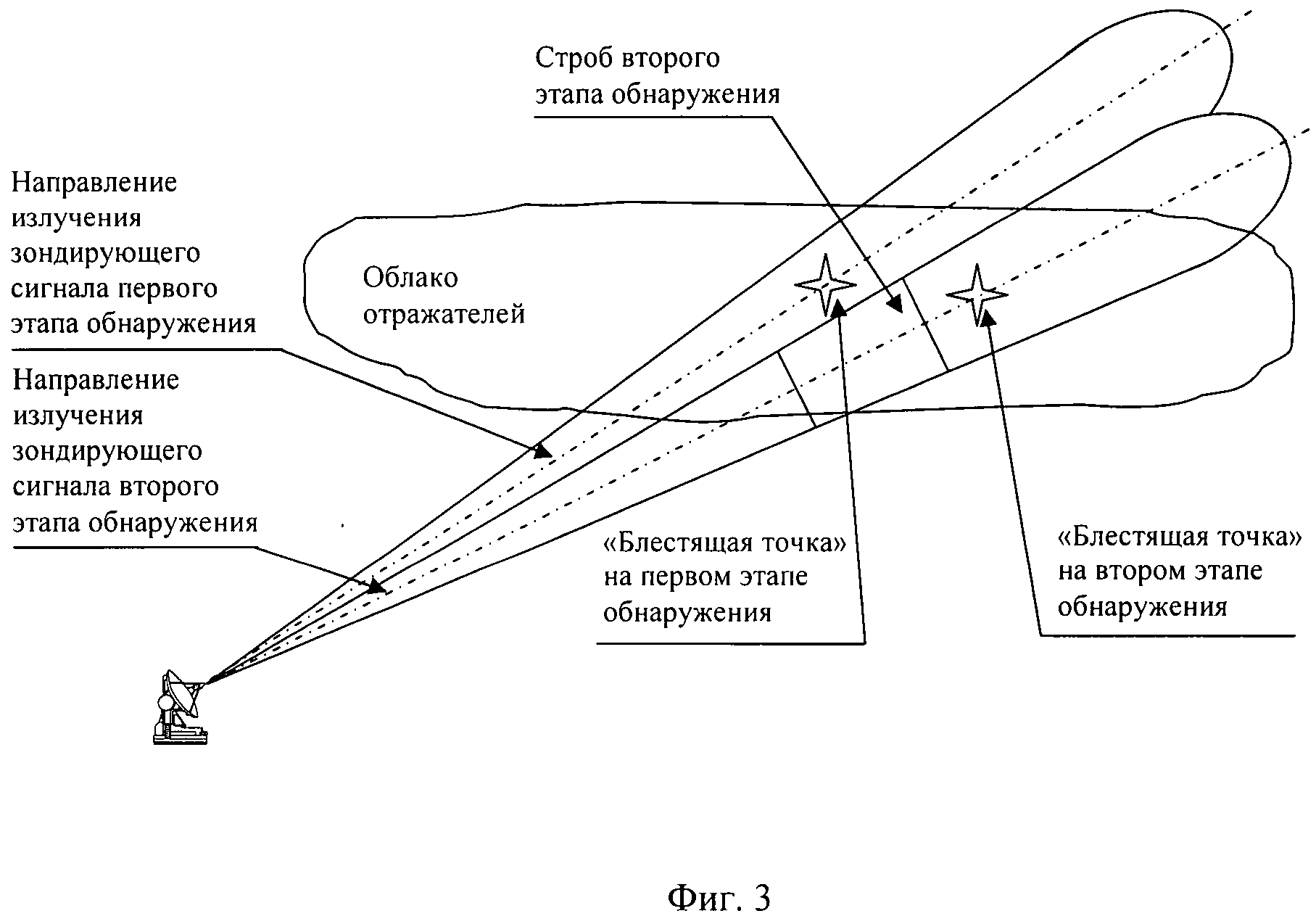
Как уже отмечалось, при облучении зондирующим сигналом распределенных в пространстве отражателей формируются так называемые «блестящие точки», которые и являются для РЛС пассивными помехами. Очевидно, что на положение «блестящих точек» влияет угловое положение направления, с которого облучается облако распределенных в пространстве отражателей. При изменении направления излучения зондирующего сигнала, изменяется пространственное положение облучаемой области распределенных помех (фиг.3). В результате «блестящие точки», принимаемые РЛС на разных этапах обнаружения, оказываются разнесенными в пространстве дальше, чем в наиболее близком способе, они реже попадают в рассчитанный по результатам обнаружения первого этапа строб, и таким образом подавление сигналов от распределенных пассивных помех увеличивается.
В изобретении направление излучения зондирующего сигнала второго этапа обнаружения относительно направления излучения зондирующего сигнала первого этапа обнаружения изменяют по одной или по обеим угловым координатам. Изменение при этом может производится в любую сторону по угловым координатам.
Для того, чтобы не произошло значительного ухудшения обнаружения сигналов от целей, изменение направление излучения зондирующего сигнала второго этапа обнаружения должно быть относительно небольшим - по каждой угловой координате не более 10% от соответствующей ширины луча по уровню половинной мощности.
Таким образом достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - иллюстрация наиболее близкого способа обнаружения радиолокационных целей.
Фиг.2 - блок-схема РЛС, реализующей наиболее близкий способ.
Фиг.3 - иллюстрация заявляемого способа обнаружения радиолокационных целей.
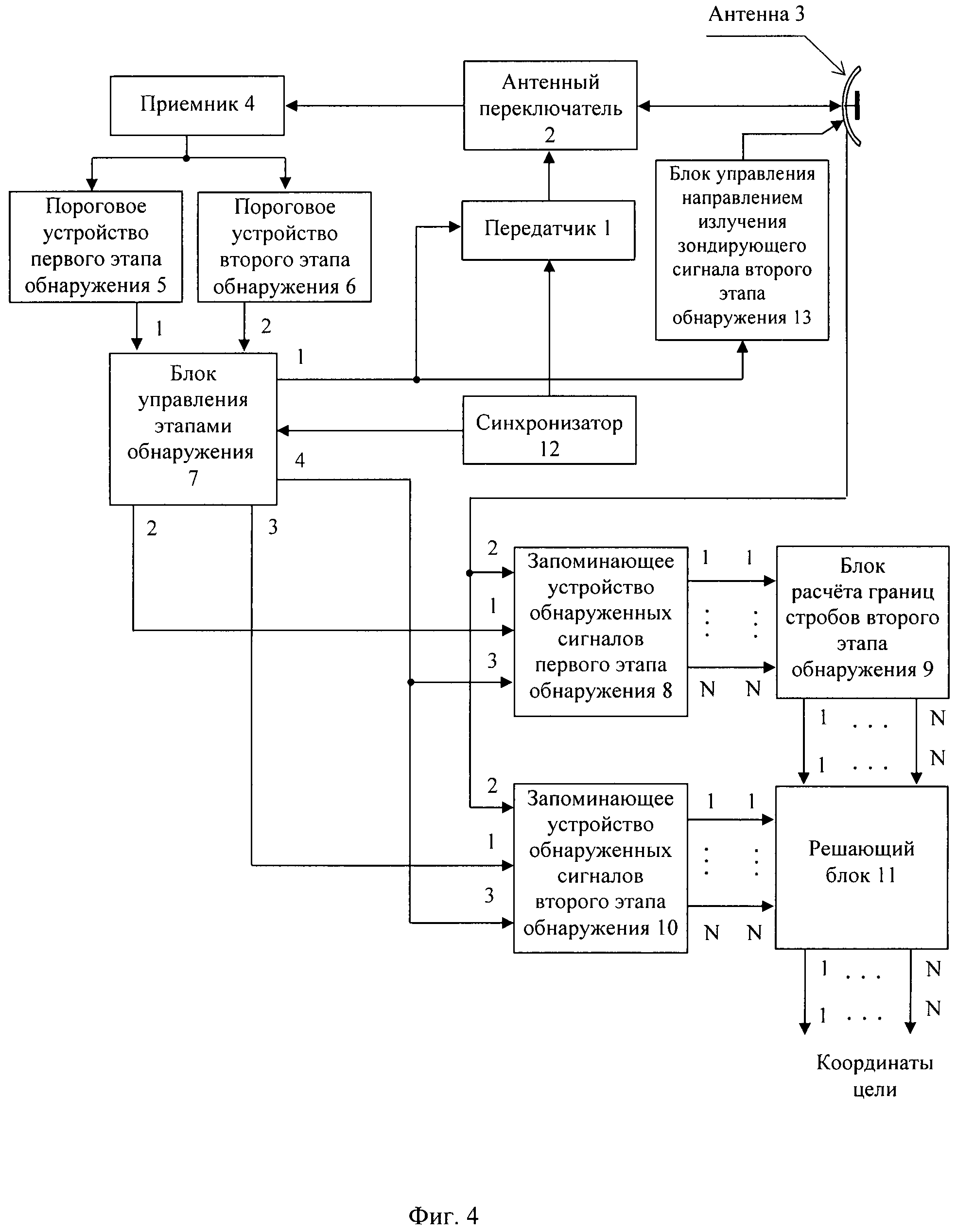
Фиг.4 - блок-схема заявляемой РЛС.
Заявляемый способ реализован в РЛС (фиг.4), содержащей передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство первого этапа обнаружения 5, пороговое устройство второго этапа обнаружения 6, блок управления этапами обнаружения 7, запоминающее устройство обнаруженных сигналов первого этапа обнаружения 8, блок расчета границ стробов второго этапа обнаружения 9, запоминающее устройство обнаруженных сигналов второго этапа обнаружения 10, решающий блок 11, синхронизатор 12, блок управления направлением излучения зондирующего сигнала второго этапа обнаружения 13, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен с входом порогового устройства первого этапа обнаружения 5 и входом порогового устройства второго этапа обнаружения 6, выход порогового устройства первого этапа обнаружения 5 и выход порогового устройства второго этапа обнаружения 6 соединены с первым и вторым входами блока управления этапами обнаружения 7 соответственно, первый, второй, третий и четвертый выходы этого блока соединены соответственно с первым управляющим входом передатчика 1, первым входом запоминающего устройства обнаруженных сигналов первого этапа обнаружения 8, первым входом запоминающего устройства обнаруженных сигналов второго этапа обнаружения 10 и третьими входами этих запоминающих устройств соответственно, N выходов запоминающего устройства обнаруженных сигналов первого этапа обнаружения 8 соединены с N входами блока расчета границ стробов второго этапа обнаружения 9, N выходов блока расчета границ стробов второго этапа обнаружения 9 и N выходов запоминающего устройства обнаруженных сигналов второго этапа обнаружения 10 соединены соответственно с первой группой из N входов и второй группой из N входов решающего блока 11, N выходов которого являются выходом РЛС, выходы синхронизатора 12 соединены с синхровходом передатчика 1 и синхровходом блока управления этапами обнаружения 7, вход блока управления направлением излучения зондирующего сигнала второго этапа обнаружения 13 соединен с первым выходом блока управления этапами обнаружения 7, а выход - с управляющим входом антенны 3.
Количество выходов запоминающего устройства обнаруженных сигналов первого этапа обнаружения 8, количество входов и выходов блока расчета границ стробов второго этапа обнаружения 9, количество выходов запоминающего устройства обнаруженных сигналов второго этапа обнаружения 10, количество входов первой и второй группы входов решающего блока 11 и количество выходов решающего блока 11, то есть величина N, задается равной максимальному количеству сигналов, которые могут быть обнаружены в одном направлении зоны обзора РЛС (обычно не более 50).
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М., Сов. радио, 1977, с.132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Пороговое устройство первого этапа обнаружения 5, пороговое устройство второго этапа обнаружения 6, запоминающее устройство обнаруженных сигналов первого этапа обнаружения 8, запоминающее устройство обнаруженных сигналов второго этапа обнаружения 10 - выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М.: Радио и связь, 1984).
Блок управления этапами обнаружения 7 - цифровой вычислитель (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М.: Радио и связь, 1984). Реализует функции вычисления дальности обнаруженных сигналов, формирования команд на излучение зондирующего сигнала второго этапа обнаружения, выдачи обнаруженных сигналов и их координат в запоминающее устройство обнаруженных сигналов первого этапа обнаружения 8 и в запоминающее устройство обнаруженных сигналов второго этапа обнаружения 10, формирования команд на обработку принятых сигналов, записанных в упомянутых запоминающих устройствах.
Блок расчета границ стробов второго этапа обнаружения 9 - вычислитель, в котором в соответствии с формулой (1) вычисляются границы стробов по дальности - выполнен на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М.: Радио и связь, 1984).
Решающий блок 11 - вычислитель, в котором производится сравнение координат обнаруженных на втором этапе сигналов с границами стробов, вычисленными в блоке расчета границ стробов второго этапа обнаружения 9, и принятие решения об обнаружении цели - выполнен на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М.: Радио и связь, 1984).
Синхронизатор 12 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. - М.: Сов. радио, 1970, с.602-603).
Блок управления направлением излучения зондирующего сигнала второго этапа обнаружения 13 - вычислитель, в котором осуществляется вычисление координат луча по углу места и азимуту для второго этапа обнаружения в процессе осмотра зоны обзора - выполнен на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина, М., Радио и связь, 1984).
Заявляемая РЛС работает следующим образом.
В передатчике 1 по командам синхронизатора 12 (импульсам синхронизации) формируется зондирующий сигнал первого этапа обнаружения, который в процессе обзора пространства с помощью антенны 3 излучается в очередное направление зоны обзора. Отраженный сигнал принимается антенной 3, поступает в приемник 4, где фильтруется, усиливается, с выхода приемника 4 сигнал подается на входы двух пороговых устройств - порогового устройства первого этапа обнаружения 5 и порогового устройства второго этапа обнаружения 6, где сравнивается с порогами первого и второго этапов обнаружения соответственно.
Сигналы, превысившие пороги обнаружения первого и второго этапов, поступают соответственно на первый и второй входы блока управления этапами обнаружения 7, где вычисляется соответствующие этим сигналам дальности.
В случае обнаружения сигнала на первом этапе обнаружения в блоке управления этапами обнаружения 7 сигналы с выхода порогового устройства второго этапа обнаружения 6 блокируются. Формируется команда на изменение направления луча и излучение в этом направлении зондирующего сигнала второго этапа обнаружения, которая с первого выхода выдается на управляющий вход передатчика 1 и на вход блока управления направлением излучения зондирующего сигнала второго этапа обнаружения 13. В блоке управления направлением излучения зондирующего сигнала второго этапа обнаружения 13 осуществляется расчет угловых координат направления излучения зондирующего сигнала второго этапа обнаружения, которые подаются на управляющий вход антенны 3. После излучения сигнала второго этапа обнаружения луч устанавливается в очередное направление зоны обзора.
Обнаруженные сигналы первого этапа обнаружения со второго выхода блока управления этапами обнаружения 7 поступают на первый вход запоминающего устройства обнаруженных сигналов первого этапа обнаружения 8, где запоминаются их амплитуды, дальности и угловые координаты. Угловые координаты поступают на второй вход этого запоминающего устройства с координатного выхода антенны 3.
Обнаруженные сигналы второго этапа обнаружения с выхода порогового устройства второго этапа обнаружения 6 поступают на второй вход блока управления этапами обнаружения 7, при этом сигналы с выхода порогового устройства первого этапа обнаружения 5 блокируются. Обнаруженные сигналы второго этапа обнаружения с третьего выхода блока управления этапами обнаружения 7 поступают на первый вход запоминающего устройства обнаруженных сигналов второго этапа обнаружения 10, где запоминаются их амплитуды, дальности и угловые координаты. Угловые координаты поступают на второй вход этого запоминающего устройства с координатного выхода антенны 3.
По окончании второго этапа обнаружения в блоке управления этапами обнаружения 7 формируется команда на обработку принятых сигналов, для чего с четвертого выхода блока управления этапами обнаружения 7 на третьи входы запоминающего устройства обнаруженных сигналов первого этапа обнаружения 8 и запоминающего устройства обнаруженных сигналов второго этапа обнаружения 10 выдается команда, по которой с N выходов запоминающего устройства обнаруженных сигналов первого этапа обнаружения 8 на N входов блока расчета границ стробов второго этапа обнаружения 9 выдаются амплитуды и координаты сигналов, обнаруженных на первом этапе обнаружения, а с N выходов запоминающего устройства обнаруженных сигналов второго этапа обнаружения 10 на вторую группу из N входов решающего блока 11 выдаются амплитуды и координаты сигналов, обнаруженных на втором этапе обнаружения. В блоке расчета границ стробов второго этапа обнаружения 9 вокруг координат сигналов, обнаруженных на первом этапе, вычисляются границы стробов по дальности в соответствии с формулой (1). Вычисленные границы стробов с N выходов подаются на первую группу из N входов решающего блока 11. В решающем блоке 11 для каждого из N направлений, в которых произошло обнаружение сигналов на первом этапе обнаружения, проверяется наличие сигналов второго этапа обнаружения в границах стробов, вычисленных в блоке расчета границ стробов второго этапа обнаружения 9. Таким образом пассивные помехи, не попавшие в стробы второго этапа обнаружения, подавляются, а сигналы, обнаруженные в упомянутых стробах, считаются сигналами от целей и их амплитуды и координаты выдаются потребителю радиолокационной информации.
Таким образом достигается заявляемый технический результат.
Способ сопровождения траектории цели
Способ радиолокационного обнаружения целей и устройство для его реализации
Способ защиты радиолокационной станции от импульсных помех и устройство для его реализации
Устройство фиксации грунта откоса
Противооползневое защитное сооружение
Противооползневое защитное сооружение
Способ обзора пространства радиолокационной станцией
Противооползневое защитное сооружение
Способ сопровождения траектории цели
Способ защиты обзорной радиолокационной станции от пассивных помех, принимаемых по боковым лепесткам диаграммы направленности антенны
Способ сопровождения траектории цели
Способ радиолокационного обнаружения целей и устройство для его реализации
Способ защиты радиолокационной станции от импульсных помех и устройство для его реализации
Устройство фиксации грунта откоса
Противооползневое защитное сооружение
Противооползневое защитное сооружение
Способ обзора пространства радиолокационной станцией
Противооползневое защитное сооружение
Способ сопровождения траектории цели
Способ защиты обзорной радиолокационной станции от пассивных помех, принимаемых по боковым лепесткам диаграммы направленности антенны

