Результат интеллектуальной деятельности: СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ
Вид РИД
Изобретение
Изобретение относится к области радиолокации, в частности к области сопровождения траекторий целей в обзорных радиолокационных станциях (РЛС).
Известен способ сопровождения траектории цели, включающий определение границ стробов сопровождения исходя из заранее заданного максимального непредвиденного маневра сопровождаемой цели, обнаружение цели в стробе сопровождения, проверку критерия сброса траектории с сопровождения (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., 1986, с.111-115).
Под непредвиденным маневром цели понимают изменение координат маневрирующей цели относительно их значений в отсутствие маневра за период между обращениями к цели (период сопровождения). То есть непредвиденный маневр цели не может быть отслежен при предыдущих обращениях к цели. Максимальный непредвиденный маневр цели зависит от аэродинамических и энергетических свойств цели и для конкретного типа целей заранее известен.
В известном способе границы строба сопровождения устанавливаются такими, чтобы при максимальном маневре цели строб накрывал цель. Однако при таком способе строб сопровождения часто оказывается чрезвычайно большим и кроме сопровождаемой цели накрывает и другие цели, случайно оказавшиеся в этот момент в этой области пространства. По таким случайным целям также формируются траектории. Происходит «размножение» траекторий, что ухудшает достоверность выдаваемой радиолокационной информации и приводит к перегрузке системы обработки радиолокационной информации. Это является недостатком способа.
Наиболее близкий к заявляемому способ сопровождения траектории цели включает определение границ стробов сопровождения на каждом периоде сопровождения на основе измерения рассогласования между измеренными и экстраполированными координатами цели, осмотр строба сопровождения, при пропуске цели в стробе сопровождения его увеличение до размеров, соответствующих заранее заданному максимальному непредвиденному маневру цели, проверку критерия сброса траектории цели с сопровождения k, где k - количество пропусков цели подряд в стробах сопровождения, при котором сопровождение траектории прекращают, (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., 1974, с.373-382).
В наиболее близком способе определение границ строба сопровождения основано на измерении рассогласования между измеренными и экстраполированными значениями координат цели. Поэтому, если цель не маневрирует или совершает относительно небольшие маневры, то траектория цели сопровождается достаточно надежно при небольших размерах стробов сопровождения. В случае, когда цель за период сопровождения совершает непредвиденный интенсивный маневр, при котором она выходит за пределы строба сопровождения и не обнаруживается в нем, то строб сопровождения увеличивают до размеров, соответствующих максимальному (заданному заранее) непредвиденному маневру цели и осуществляют дополнительный поиск цели в увеличенном стробе. Обнаруженный в увеличенном стробе отражающий объект принимается за цель и сопровождение траектории продолжается. Способ позволяет уменьшить потери траекторий маневрирующих целей, сократить нагрузку на систему обработки радиолокационной информации.
Наиболее близкий способ имеет следующий недостаток.
В случае, когда сопровождаемая цель в стробе сопровождения пропущена из-за флюктуации отраженного сигнала (за счет изменения ракурса цели относительно РЛС, при котором уменьшается мощность приходящего к РЛС отраженного сигнала, действия естественных или искусственных помех), а в увеличенном стробе сопровождения обнаружена случайно попавшая в этот момент в эту область пространства другая цель, принимается решение о том, что сопровождаемая цель совершила непредвиденный маневр и траектория этой случайной цели считается продолжением сопровождаемой траектории цели. В результате траектория продолжается в ложном направлении, а траектория сопровождаемой цели оказывается потерянной.
Решаемой задачей (техническим результатом), таким образом, является уменьшение потерь сопровождаемых траекторий целей.
Указанный технический результат достигается тем, что в способе сопровождения траектории цели, включающем определение границ стробов сопровождения на каждом периоде сопровождения на основе измерения рассогласования между измеренными и экстраполированными координатами цели, осмотр строба сопровождения, при пропуске цели в стробе сопровождения его увеличение до размеров, соответствующих заранее заданному максимальному непредвиденному маневру цели, проверку критерия сброса траектории цели с сопровождения k, где k - количество пропусков цели подряд в стробах сопровождения, при котором сопровождение траектории прекращают, согласно изобретению, если в процессе осмотра увеличенного строба сопровождения обнаружен отражающий объект, то в течение следующих k-1 периодов сопровождения одновременно сопровождают два продолжения траектории: продолжение, использующее координаты отражающего объекта, и продолжение, использующее экстраполированные координаты цели, если по окончании k периодов сопровождения выполнился критерий сброса с сопровождения продолжения траектории, использующего экстраполированные координаты цели, то продолжение траектории, использующее координаты отражающего объекта, считают продолжением сопровождаемой траектории цели, если критерий сброса не выполнился, то продолжение траектории, использующее экстраполированные координаты цели, считают продолжением траектории цели, а продолжение, использующее координаты отражающего объекта, считают началом траектории новой цели.
Суть заявляемого технического решения заключается в следующем.
Как уже отмечалось, в процессе сопровождения траектории пропуск цели в стробе сопровождения может произойти как из-за флюктуации отраженного сигнала, так и из-за того, что за период сопровождения цель совершила непредвиденный интенсивный маневр и оказалась за пределами строба сопровождения. В обзорных РЛС период сопровождения достаточно велик (от 5 до 12 секунд), поэтому стробы сопровождения по маневрирующим целям требуются чрезвычайно большие.
Однако устанавливать размеры стробов сопровождения исходя из максимального непредвиденного маневра цели на каждом периоде сопровождения нецелесообразно, поскольку это приводит к значительному увеличению количества ложных траекторий и большим вычислительным затратам.
В наиболее близком способе размеры строба сопровождения увеличивают до заранее заданных максимальных размеров только при пропуске цели. При этом количество ложных траекторий возрастает незначительно (относительно сопровождения неманеврирующей или слабоманеврирующей цели), увеличение затрат на обработку радиолокационной информации невелико.
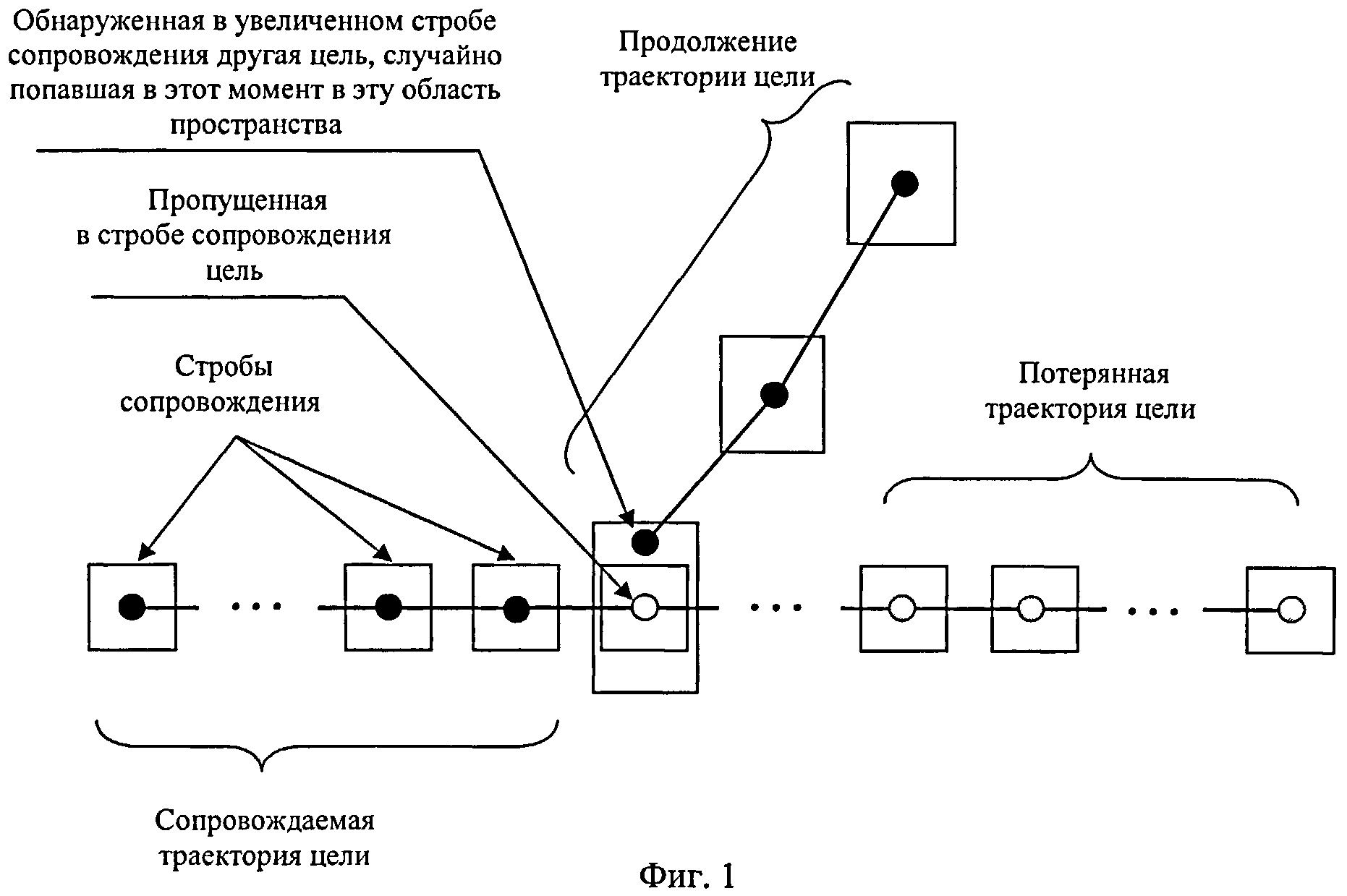
Однако, как уже отмечалось, если сопровождаемая цель в стробе сопровождения не обнаружена из-за флюктуации отраженного сигнала, а в увеличенном стробе сопровождения обнаружена другая цель, случайно оказавшаяся в этот момент в этой области пространства, то ее координаты будут ошибочно взяты в качестве продолжения траектории, а траектория сопровождаемой цели окажется потерянной (фиг.1).
В заявляемом способе возможность принятия указанного ошибочного решения уменьшается путем проверки события, заключающегося в том, что сопровождаемая цель не маневрирует, а ее пропуск обусловлен флюктуацией сигнала. Указанная проверка реализуется следующим образом.
Если в процессе сопровождения траектории цель оказалась пропущенной в стробе сопровождения, а в увеличенном стробе сопровождения обнаружен отражающий объект (который может быть как сопровождаемой целью, так и другой целью), в качестве возможных продолжений траектории рассматривают как координаты обнаруженного отражающего объекта, так и экстраполированные координаты цели. Для этого в течение следующих k-1 периодов сопровождения (где k - критерий сброса траектории с сопровождения - количество пропусков цели подряд в стробах сопровождения, при котором сопровождение траектории прекращают) одновременно сопровождают два продолжения траектории: продолжение, использующее координаты отражающего объекта, и продолжение, использующее экстраполированные координаты цели.
Если по окончании k периодов сопровождения (отсчет начинают с периода, в котором произошел пропуск цели) выполнился критерий сброса с сопровождения продолжения траектории, использующего экстраполированные координаты цели, то продолжение траектории, использующее координаты отражающего объекта, считают продолжением сопровождаемой траектории цели, если указанный критерий сброса не выполнился (фиг.2), то продолжение траектории, использующее экстраполированные координаты цели, считают продолжением траектории цели, а продолжение, использующее координаты отражающего объекта, считают началом траектории новой цели.
В заявляемым способе при пропуске цели в стробе сопровождения и одновременном обнаружении в увеличенном стробе сопровождения другой цели, случайно оказавшейся в этот момент в этой области пространства, сопровождаемая траектория цели не будет потеряна, а траектория случайной цели будет идентифицирована как новая траектория. Таким образом в заявляемом способе достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - иллюстрация сопровождения траектории цели наиболее близким способом в ситуации, когда сопровождаемая цель в очередном стробе сопровождения пропущена, а в увеличенном стробе сопровождения обнаружена другая цель, случайно попавшая в этот момент в эту область пространства. В результате сопровождаемая цель потеряна, а в качестве продолжения ошибочно взята траектория другой цели.
Фиг.2 - иллюстрация сопровождения траектории заявляемым способом в ситуации, когда сопровождаемая цель в очередном стробе сопровождения пропущена, а в увеличенном стробе сопровождения обнаружена другая цель, случайно попавшая в этот момент в эту область пространства. В результате траектория сопровождаемой цели не потеряна, а по другой цели сформирована новая траектория.
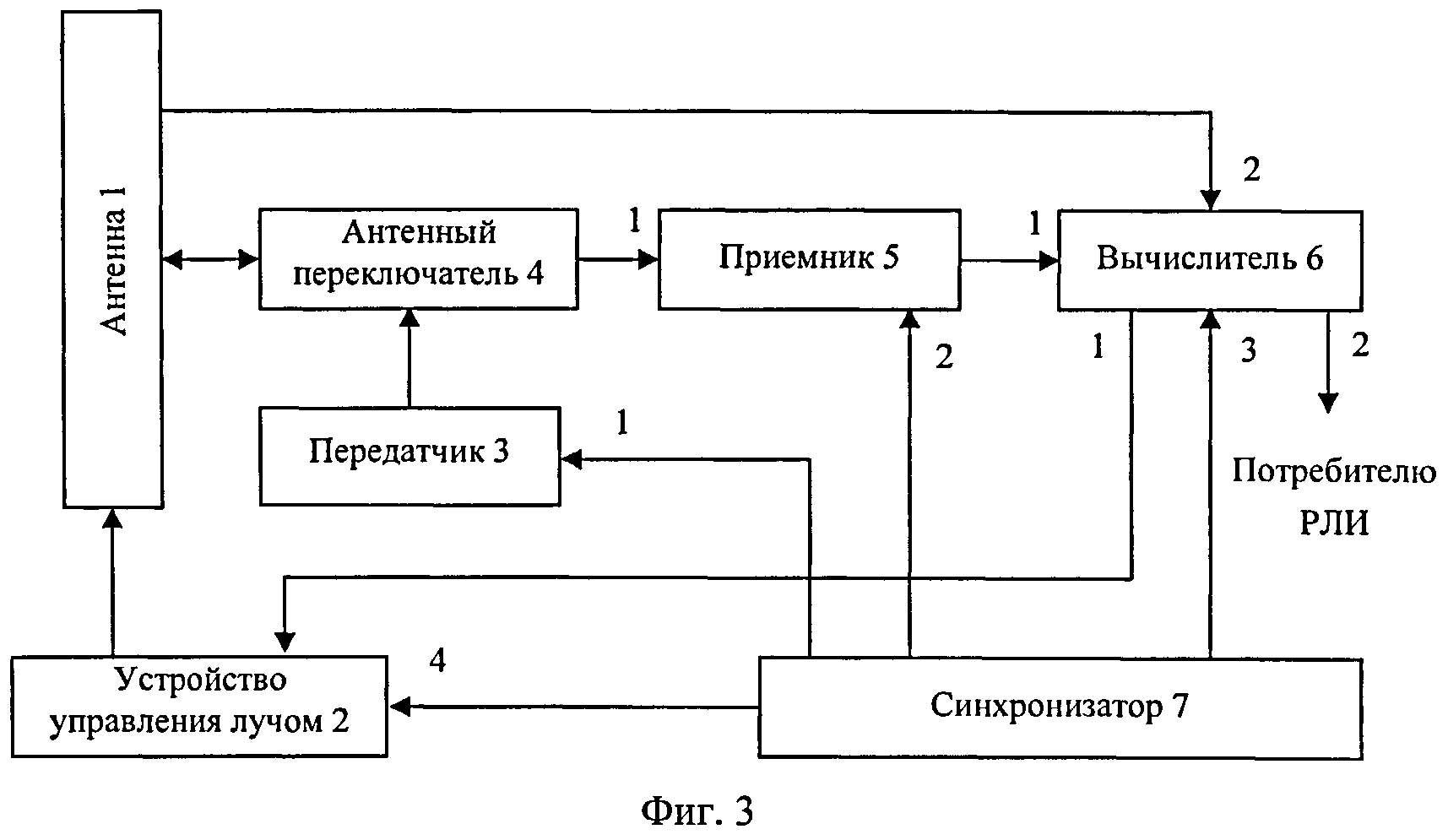
Фиг.3 - блок-схема РЛС, реализующей заявляемый способ.
Обзорная радиолокационная станция, реализующая заявляемый способ, содержит (фиг.3) антенну 1, устройство управления лучом 2, выход которого соединен с антенной 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, первый выход которого соединен со входом устройства управления лучом 2, а второй выход предназначен для выдачи радиолокационной информации потребителю, а также синхронизатор 7, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, четыре выхода синхронизатора 7 соединены соответственно с синхровходами устройства управления лучом 2, передатчика 3, приемника 5 и вычислителя 6 (Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: Пер с англ. - М., 1986, стр.19).
Указанная РЛС может быть выполнена на следующих функциональных элементах.
Антенна 1 - ФАР с двумерным электронным сканированием по углу места и азимуту (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М., 1977, с.138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М. Сколника, т.2. М., 1977, с.141-143).
Передатчик 3 - многокаскадный импульсный передатчик на клистроне (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. М., 1967, с.278-279, рис.7.2).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. М., 1967, с.166-168).
Приемник 5 - супергетеродинный приемник (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. М., 1967, с.343-344, рис.8.1).
Вычислитель 6 - цифровой вычислитель (Интегральные микросхемы. Справочник под ред. Т.В. Тарабрина, - М., 1984). В вычислителе 6 реализуется известная операция сопровождения траектории цели (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., 1974, с.285-287) и принимается решение о продолжении траектории цели.
Синхронизатор 7 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. - М., Сов. радио, 1970, с.602-603).
РЛС, реализующая заявляемый способ, работает следующим образом.
На текущем периоде сопровождения по команде от синхронизатора 7 в соответствии с координатами границ стробов сопровождения, поступающими с первого выхода вычислителя 6, в устройстве управления лучом 2 для каждого положения луча рассчитывается распределение состояний фазовращателей в полотне антенны 1. Указанные координаты рассчитываются в вычислителе 6 на каждом периоде сопровождения по результатам сопровождения цели на предыдущих периодах. Луч антенны последовательно устанавливается в направления строба сопровождения, сформированные передатчиком 3 высокочастотные зондирующие сигналы через антенный переключатель 4 подаются в антенну 1 и излучаются.
Отраженные сигналы, принимаются антенной 1, через антенный переключатель 4 поступают в приемник 5, где преобразуются на видеочастоту, фильтруются, сравниваются с порогом обнаружения. По результатам сравнения сигнала с порогом обнаружения принимается решение об обнаружении сигналов.
Координаты отражающих объектов, обнаруженных в стробах сопровождения, подаются в вычислитель 6, где осуществляется также и сопровождение траекторий целей, включающее на каждом периоде сопровождения определение границ стробов сопровождения на основе измерения рассогласования между измеренными и экстраполированными значениями координат цели, осмотр строба сопровождения, при пропуске цели в стробе сопровождения увеличение его размеров до максимальных, соответствующих заранее заданному максимальному непредвиденному маневру цели, проверку критерия сброса траектории цели с сопровождения k, где k - количество пропусков цели подряд в стробах сопровождения, при котором сопровождение траектории прекращают.
Если в увеличенном стробе обнаружен отражающий объект, то в течение следующих k-1 периодов сопровождения одновременно сопровождают два продолжения траектории: продолжение, использующее координаты отражающего объекта, и продолжение, использующее экстраполированные координаты цели. Если по окончании k периодов сопровождения выполнился критерий сброса с сопровождения продолжения траектории, использующего экстраполированные координаты цели, то продолжение траектории, использующее координаты отражающего объекта, считают продолжением траектории цели, если критерий сброса не выполнился, то продолжение траектории, использующее экстраполированные координаты цели, считают продолжением траектории цели, а продолжение, использующее координаты отражающего объекта, считают началом траектории новой цели. Параметры сопровождаемых траекторий со второго выхода вычислителя 6 выдаются потребителю радиолокационной информации.
Таким образом достигается заявляемый технический результат.
Способ сопровождения траектории цели, включающий определение границ стробов сопровождения на каждом периоде сопровождения на основе измерения рассогласования между измеренными и экстраполированными координатами цели, осмотр строба сопровождения, при пропуске цели в стробе сопровождения его увеличение до размеров, соответствующих заранее заданному максимальному непредвиденному маневру цели, проверку критерия сброса траектории цели с сопровождения k, где k - количество пропусков цели подряд в стробах сопровождения, при котором сопровождение траектории прекращают, отличающийся тем, что, если в процессе осмотра увеличенного строба сопровождения обнаружен отражающий объект, то в течение следующих k-1 периодов сопровождения одновременно сопровождают два продолжения упомянутой траектории: продолжение, использующее координаты отражающего объекта, и продолжение, использующее экстраполированные координаты цели, если по окончании k периодов сопровождения выполнился критерий сброса с сопровождения продолжения траектории, использующего экстраполированные координаты цели, то продолжение траектории, использующее координаты отражающего объекта, считают продолжением упомянутой траектории, если критерий сброса не выполнился, то продолжение траектории, использующее экстраполированные координаты цели, считают продолжением упомянутой траектории, а продолжение, использующее координаты отражающего объекта, считают началом траектории новой цели.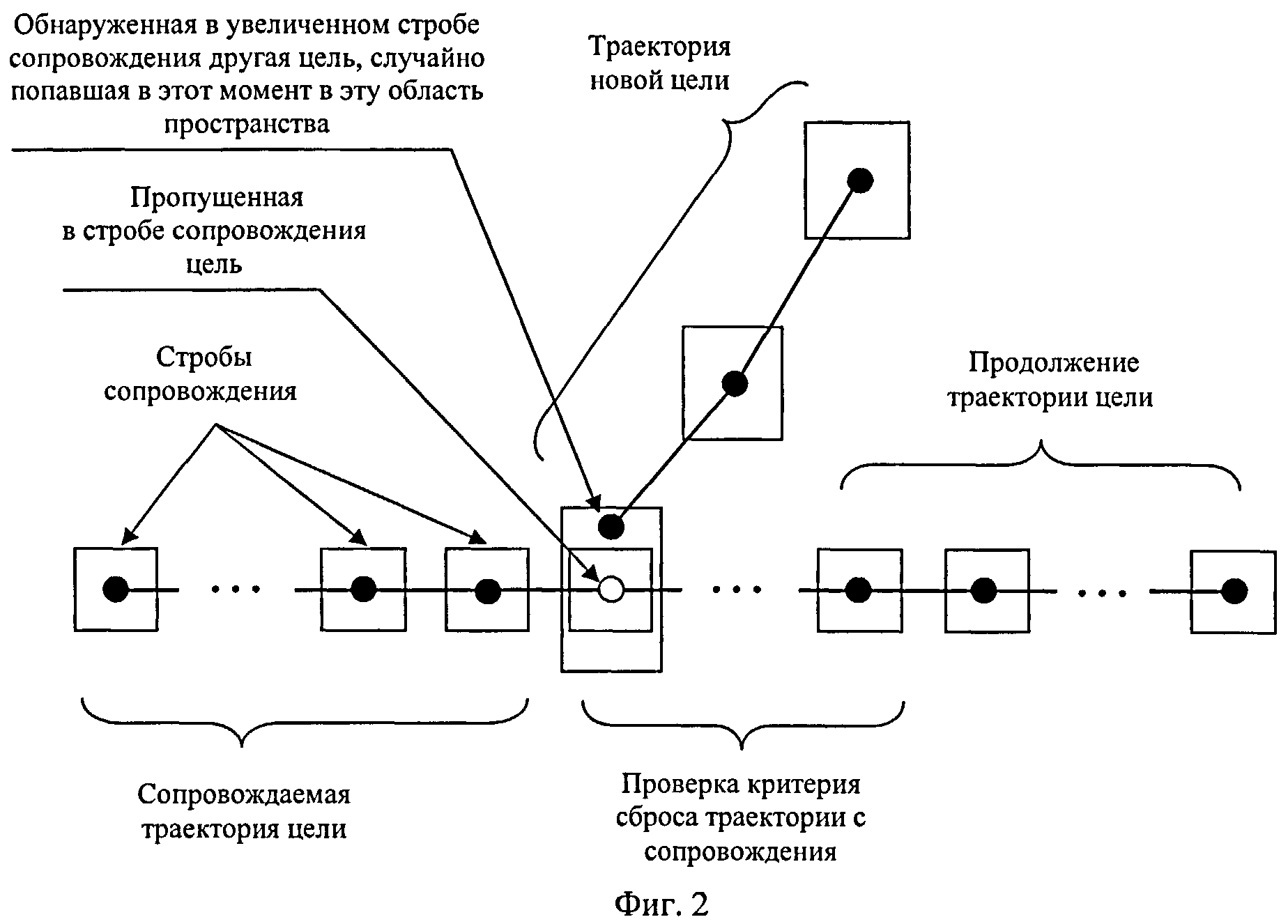
Способ радиолокационного обнаружения целей и устройство для его реализации
Способ защиты радиолокационной станции от импульсных помех и устройство для его реализации
Способ обнаружения радиолокационных целей и радиолокационная станция для его реализации
Способ обзора пространства радиолокационной станцией
Способ сопровождения траектории цели
Способ защиты обзорной радиолокационной станции от пассивных помех, принимаемых по боковым лепесткам диаграммы направленности антенны
Способ защиты обзорной радиолокационной станции от пассивных помех в виде скоплений обнаруженных сигналов и радиолокационная станция для его реализации
Способ обнаружения и сопровождения траектории цели
Способ защиты обзорной радиолокационной станции с фазированной антенной решеткой от помех
Способ измерения угловых координат цели
Способ радиолокационного обнаружения целей и устройство для его реализации
Способ защиты радиолокационной станции от импульсных помех и устройство для его реализации
Способ обнаружения радиолокационных целей и радиолокационная станция для его реализации
Способ обзора пространства радиолокационной станцией
Способ сопровождения траектории цели
Способ защиты обзорной радиолокационной станции от пассивных помех, принимаемых по боковым лепесткам диаграммы направленности антенны
Способ защиты обзорной радиолокационной станции от пассивных помех в виде скоплений обнаруженных сигналов и радиолокационная станция для его реализации
Способ обнаружения и сопровождения траектории цели
Способ защиты обзорной радиолокационной станции с фазированной антенной решеткой от помех
Способ измерения угловых координат цели

