Результат интеллектуальной деятельности: ПРИЕМНИК ГЛОНАСС
Вид РИД
Изобретение
Настоящее изобретение относится к приемнику ГЛОНАСС (глобальная навигационная система орбитальных спутников) для измерения положения с использованием ГЛОНАСС.
Системами поддержки навигации с использованием искусственного спутника являются GPS, система Galileo, ГЛОНАСС, которые хорошо известны. В случае GPS и системы Galileo каждый искусственный спутник передает сигнал, имеющий одинаковую частоту. Индивидуальный код распространения для модуляции присваивается каждому искусственному спутнику, чтобы приемник распознавал каждый искусственный спутник. В случае ГЛОНАСС каждый искусственный спутник передает сигнал, имеющий разную частоту. В частности, частоты сигнала, переданного от искусственных спутников, находятся в интервалах 562,5 кГц. Таким образом, приемник ГЛОНАСС распознает каждый искусственный спутник на основе частоты.
Система поддержки навигации с использованием искусственных спутников детектирует разницу во времени передачи и времени приема сигнала от искусственного спутника. Система вычисляет квази-расстояние (то есть псевдорасстояние) от искусственного спутника до приемника путем умножения скорости света на разницу во времени. Затем система измеряет текущее положение приемника на основе информации о положении множества искусственных спутников и псевдорасстояния от каждого искусственного спутника до приемника.
Когда искусственные спутники, например спутники ГЛОНАСС, передают сигналы, имеющие разные частоты, то при обработке сигналов в приемнике время задержки каждой частоты отличается, то есть групповая задержка каждой частоты разная. Когда все искусственные спутники, например спутники GPS и спутники Gallileo, передают сигналы, имеющие одинаковую частоту, групповая задержка сигнала, принятого на приемнике от каждого искусственного спутника, является постоянной. Соответственно, групповую задержку сигнала от каждого искусственного спутника можно аннулировать или компенсировать, чтобы групповая задержка не оказывала влияния на определение текущего положения транспортного средства.
С другой стороны, в случае спутников ГЛОНАСС, групповая задержка каждой частоты отличается в соответствии с характеристиками средства приема сигналов, например полосового фильтра в приемнике. Полосовой фильтр фильтрует сигнал в заранее определенном частотном диапазоне. Когда групповая задержка каждой частоты у сигнала, принятого от соответствующего искусственного спутника, отличается, то псевдорасстояние, вычисленное на основе разницы во времени между временем передачи и временем приема, меняется при каждой частоте, то есть псевдорасстояние меняется с каждым искусственным спутником в качестве объекта, от которого принимается сигнал. В результате, например, когда разность групповой задержки составляет 10 наносекунд, разность псевдорасстояния приблизительно равна трем метрам. Таким образом, возникает проблема в том, что уменьшается точность текущего положения, которое нужно измерить. Более того, не только характеристики средства приема сигналов, но также температура и индивидуальное отклонение изделия могут оказывать влияние на разность групповой задержки.
Таким образом, традиционно предоставляются следующие два пути для уменьшения влияния групповой задержки (см. JP 3302432, JP 3691231, JP 3730387, JP 3753351). По первому пути оценивается предварительно подготовленное пробное изделие. На основе оценки получают данные корреляции, показывающие корреляцию между групповой задержкой и частотой. Полученные данные корреляции сохраняются в запоминающем устройстве приемника. Таким образом, время приема корректируется в соответствии с данными корреляции между групповой задержкой и частотой, сохраненными в запоминающем устройстве. В результате использования псевдорасстояния, вычисленного из скорректированного времени приема, повышается точность позиционирования. По второму пути приемник дополнительно включает в себя средство измерения для измерения групповой задержки в приемнике, в дополнение к схеме для обработки фактического сигнала. Таким образом, время приема корректируется в реальном времени в соответствии с частотой и температурой, измеренными средством измерения, и групповой задержкой индивидуального изделия. В результате использования псевдорасстояния, вычисленного из скорректированного времени приема, повышается точность позиционирования.
Однако по первому пути сложно устранить влияние групповой задержки, присущей изменению температуры. Дополнительно, при минимизировании индивидуального отклонения изделия, возникают проблемы в том, что усложняется исполнение, и производительность процесса производства снижается. Кроме того, по второму пути необходимо добавлять большую аналоговую схему и большую цифровую схему, которые образуют средство измерения. Соответственно, возникают проблемы в том, что схема усложняется, и размеры схемы становятся большими. Более того, снижается чувствительность.
В связи с вышеописанной проблемой целью настоящего изобретения является предоставление приемника ГЛОНАСС, точность позиционирования которого улучшена с помощью уменьшения влияния температуры без усложнения исполнения, снижения производительности процесса производства, усложнения схемы, увеличения размеров и снижения чувствительности.
В связи с вышеописанной проблемой другой целью настоящего изобретения является предоставление приемника ГЛОНАСС, точность позиционирования которого улучшена с помощью уменьшения влияния индивидуального отклонения изделия без усложнения исполнения, снижения производительности процесса производства, усложнения схемы, увеличения размеров и снижения чувствительности.
В соответствии с первым аспектом настоящего раскрытия изобретения, приемник ГЛОНАСС включает в себя: блок приема сигналов для приема множества сигналов, имеющих разные частоты, от множества искусственных спутников соответственно; детектор температуры для детектирования температуры блока приема сигналов; запоминающее устройство для хранения характеристики групповой задержки каждого сигнала в блоке приема сигналов на соответствующей частоте в виде данных о характеристике групповой задержки у каждой частоты и для хранения температурной зависимости у групповой задержки каждого сигнала в блоке приема сигналов на соответствующей частоте в виде данных температурной зависимости; и вычислитель положения для коррекции времени приема каждого сигнала, имеющего соответствующую частоту, принятого блоком приема сигналов, с использованием данных о характеристике групповой задержки, сохраненных в запоминающем устройстве, для коррекции времени приема каждого сигнала на основе температуры блока приема сигналов, детектированной детектором температуры, и данных температурной зависимости, сохраненных в запоминающем устройстве, и для вычисления текущего положения в соответствии с откорректированным временем приема.
В вышеприведенном приемнике точность позиционирования улучшена с помощью уменьшения влияния температуры без усложнения исполнения, снижения производительности процесса производства, усложнения схемы, увеличения размеров и снижения чувствительности.
В соответствии со вторым аспектом настоящего раскрытия изобретения, приемник ГЛОНАСС включает в себя: блок приема сигналов для приема множества сигналов, имеющих разные частоты, от множества искусственных спутников соответственно; запоминающее устройство индивидуального отклонения изделия для хранения характеристики блока приема сигналов, присущей индивидуальному отклонению изделия у блока приема сигналов, в виде данных об уникальной характеристике блока приема сигналов; запоминающее устройство для хранения характеристики групповой задержки у каждого сигнала в блоке приема сигналов на соответствующей частоте в виде данных о характеристике групповой задержки и для хранения характеристики задержки индивидуального отклонения изделия у каждого сигнала на соответствующей частоте, присущей индивидуальному отклонению изделия у блока приема сигналов, в виде данных о характеристике индивидуального отклонения изделия; и вычислитель положения для коррекции времени приема каждого сигнала, имеющего соответствующую частоту, принятого блоком приема сигналов, с использованием данных о характеристике групповой задержки, сохраненных в запоминающем устройстве, для коррекции времени приема каждого сигнала на основе данных об уникальной характеристике, сохраненных в запоминающем устройстве индивидуального отклонения изделия, и данных о характеристике индивидуального отклонения изделия, сохраненных в запоминающем устройстве, и для вычисления текущего положения в соответствии с откорректированным временем приема.
В вышеприведенном приемнике точность позиционирования улучшена с помощью уменьшения влияния индивидуального отклонения изделия без усложнения исполнения, снижения производительности процесса производства, усложнения схемы, увеличения размеров и снижения чувствительности.
Вышеупомянутые и другие цели, признаки и преимущества настоящего изобретения станут более очевидными из нижеследующего подробного описания, выполненного со ссылкой прилагаемые чертежи. На чертежах:
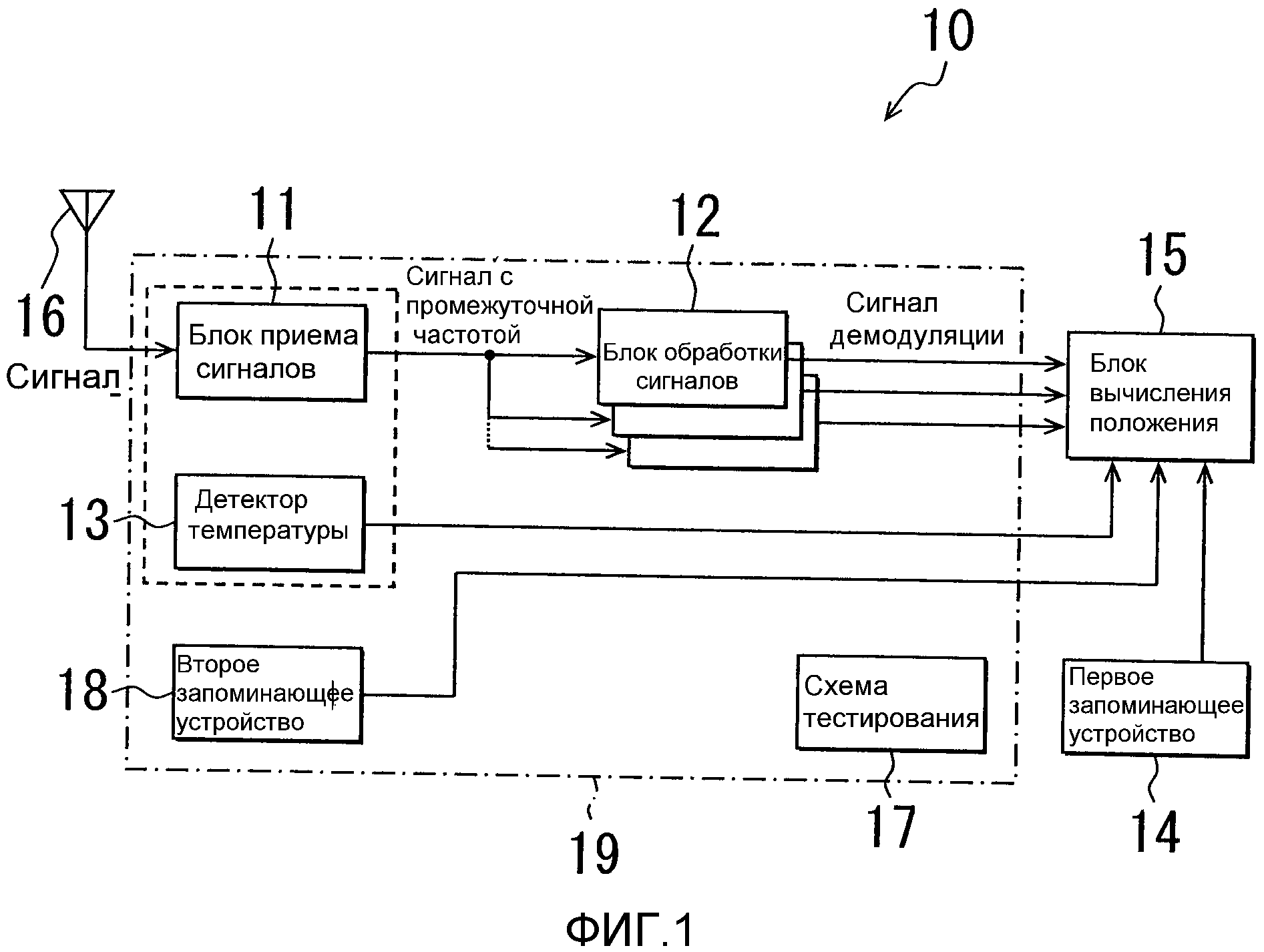
Фиг.1 - блок-схема, показывающая конструкцию приемника ГЛОНАСС в соответствии с первым вариантом осуществления;
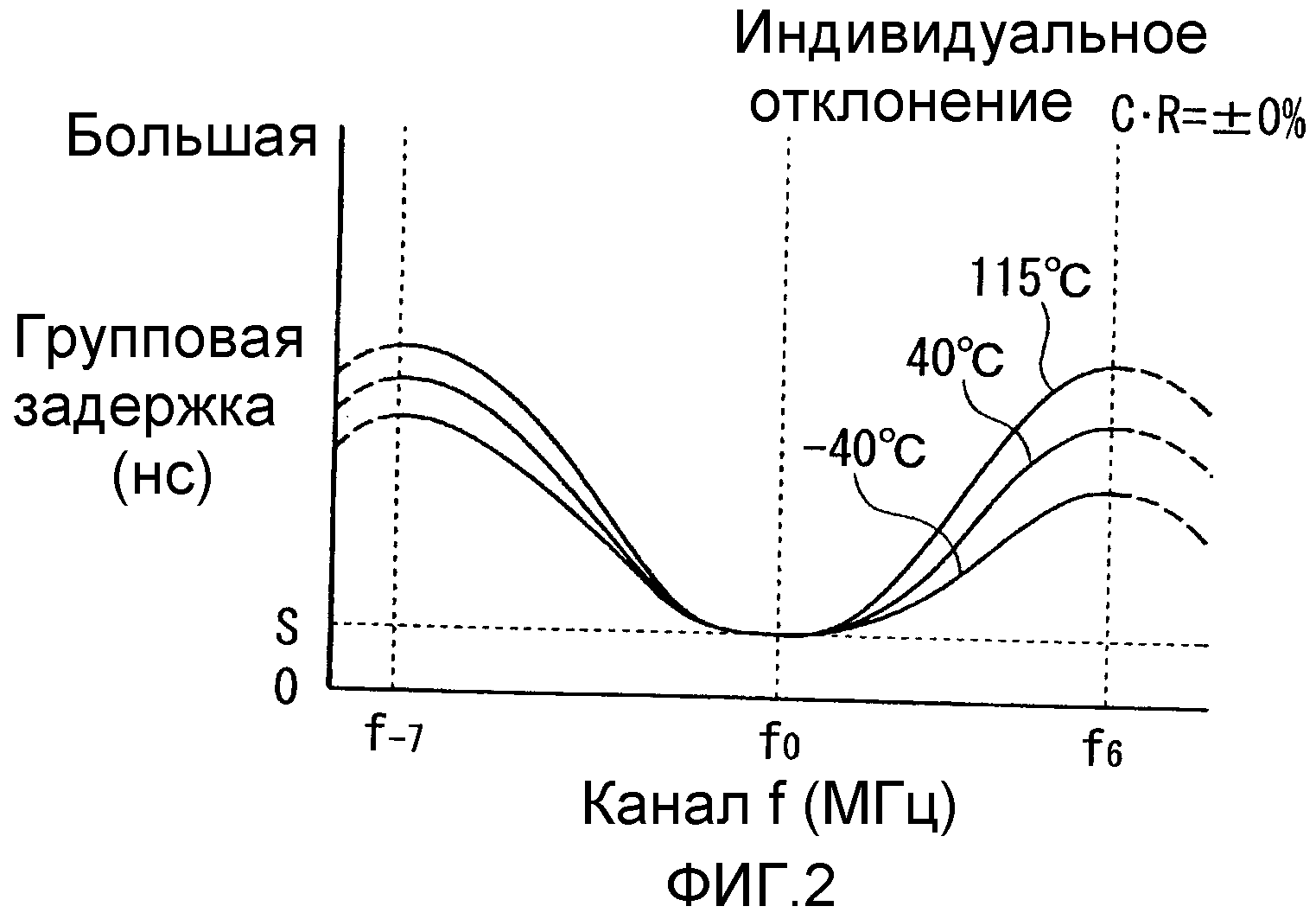
Фиг.2 - схема, показывающая соотношение между температурой, частотой и групповой задержкой, когда индивидуальное отклонение изделия у блока приема сигналов является постоянным;
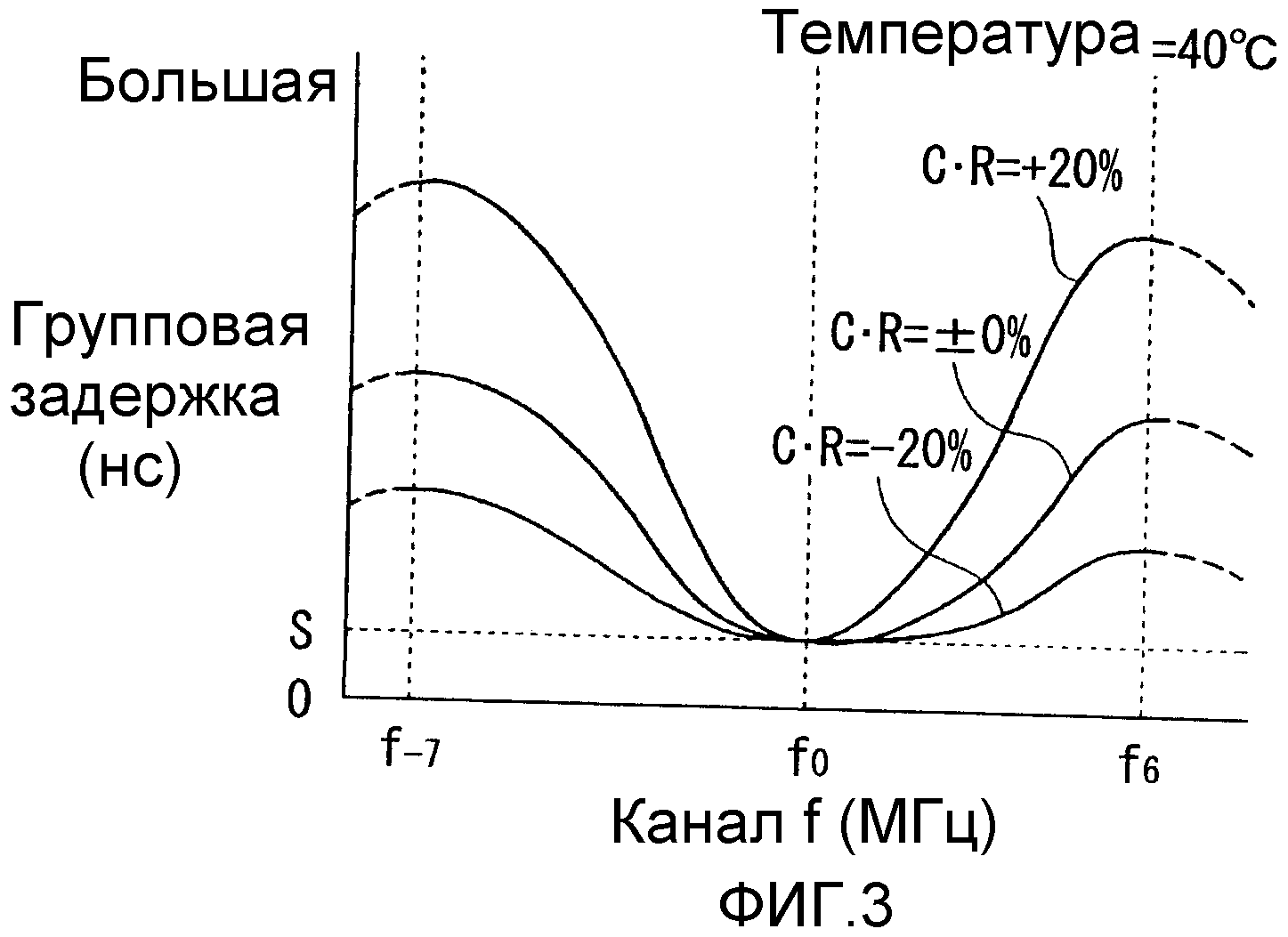
Фиг.3 - схема, показывающая соотношение между индивидуальным отклонением изделия у блока приема сигналов, частотой и групповой задержкой, когда температура блока приема сигналов является постоянной;
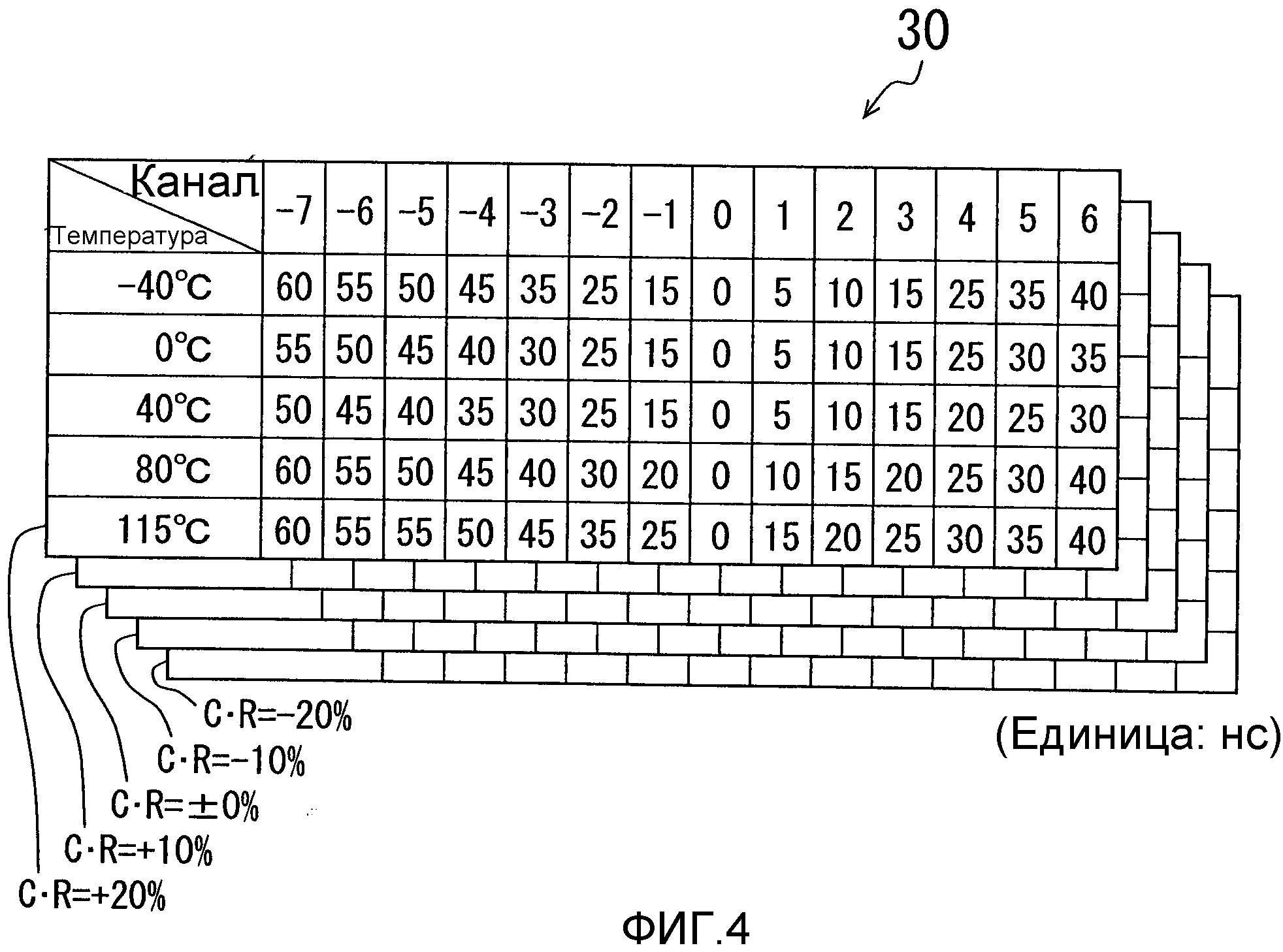
Фиг.4 - схема, показывающая таблицу, которая задает соотношение между температурой блока приема сигналов, индивидуальным отклонением изделия у блока приема сигналов и частотой;
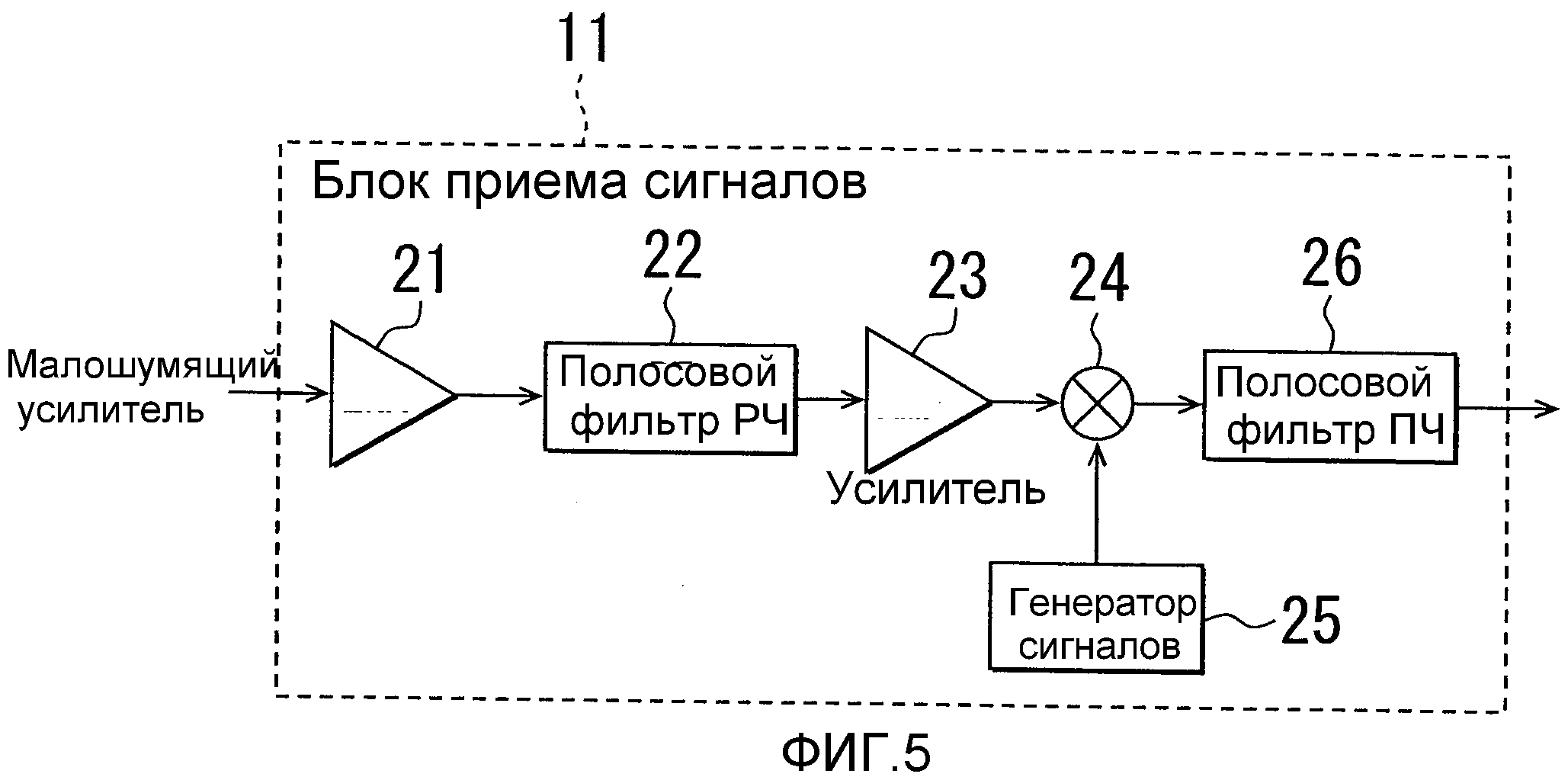
Фиг.5 - блок-схема, показывающая конструкцию блока приема сигналов в приемнике ГЛОНАСС в соответствии со вторым вариантом осуществления;
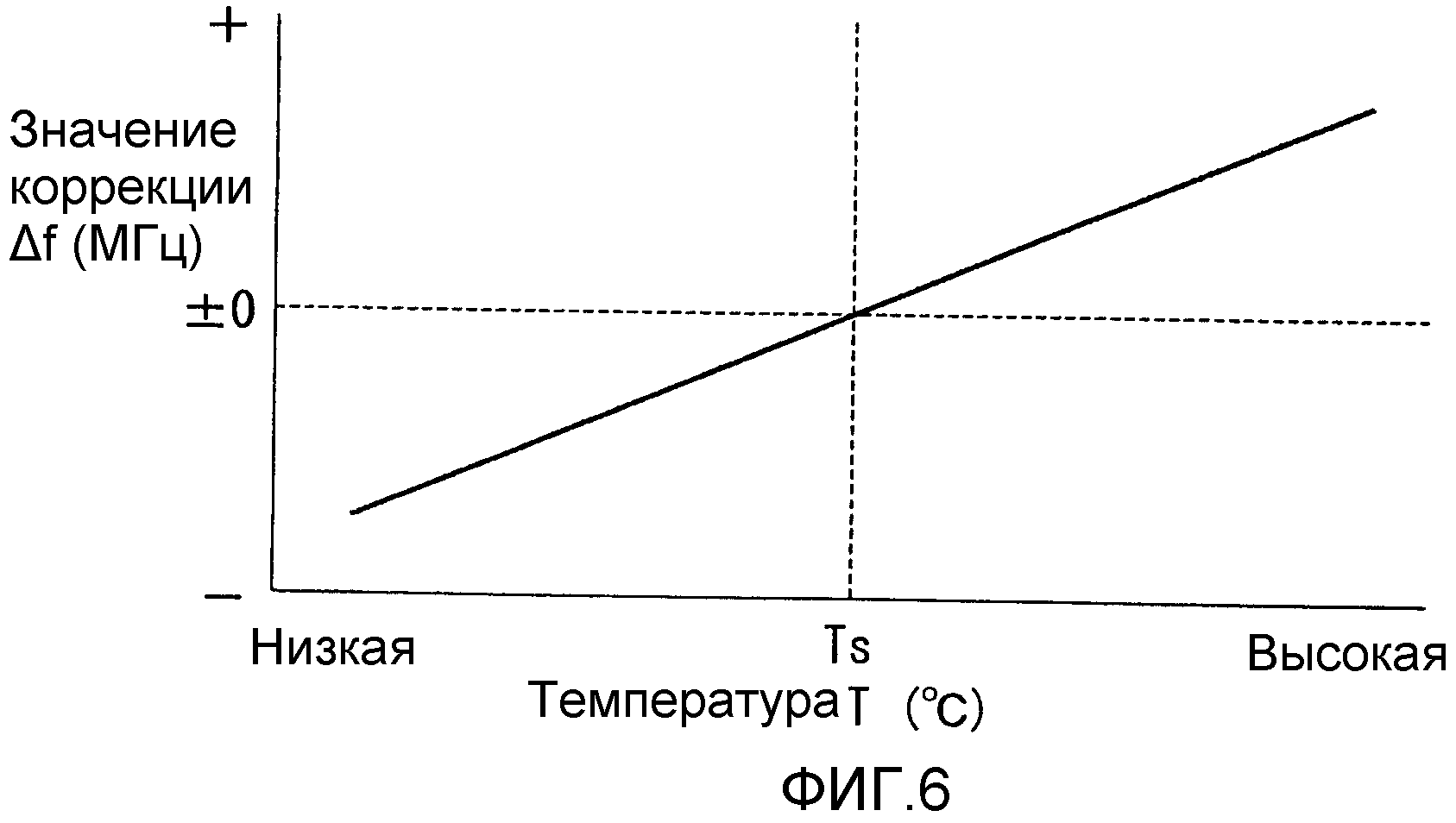
Фиг.6 - схема, показывающая соотношение между температурой и значением частотной коррекции;
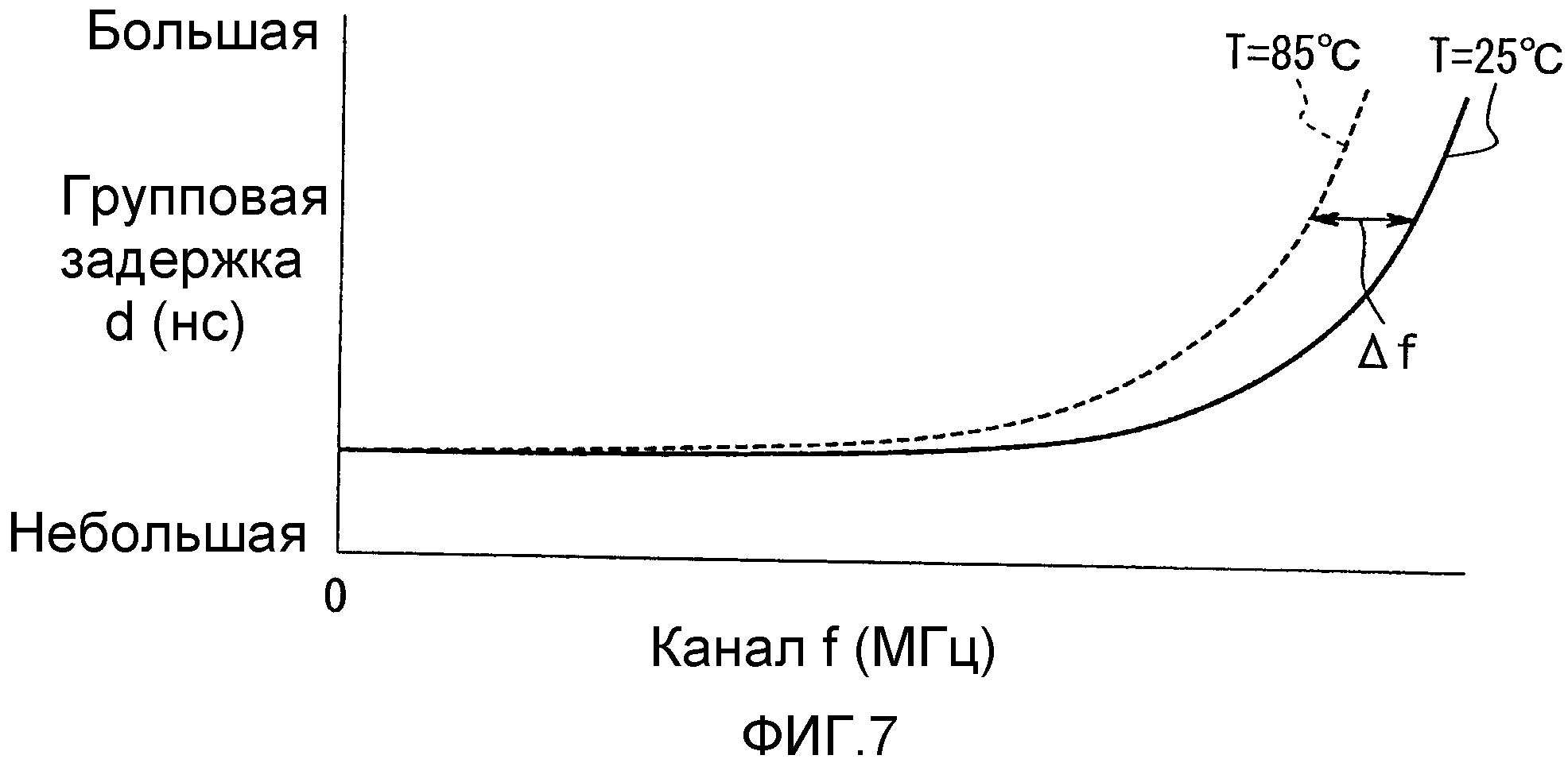
Фиг.7 - схема, показывающая соотношение между каналом и групповой задержкой; и
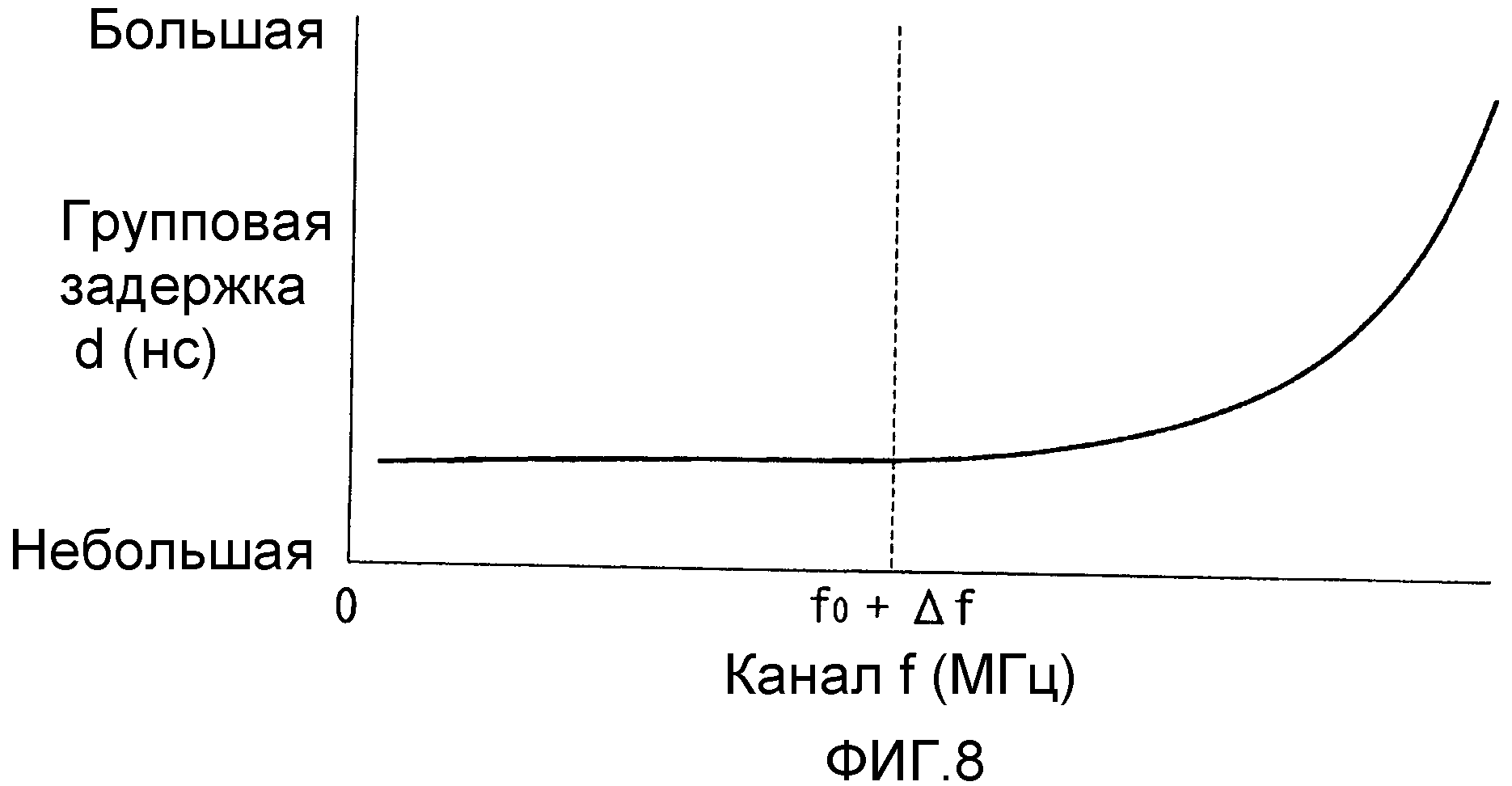
Фиг.8 - схема, показывающая соотношение между каналом и групповой задержкой, измененной в связи со значением частотной коррекции.
Приемник ГЛОНАСС (то есть "приемник") в соответствии с множеством примерных вариантов осуществления настоящего изобретения будет объясняться со ссылкой на чертежи.
(Первый вариант осуществления)
Фиг.1 показывает электрическое строение приемника 10 в соответствии с первым вариантом осуществления. Приемник 10 включает в себя блок 11 приема сигналов в качестве средства приема сигналов, блок 12 обработки сигналов, датчик 13 температуры в качестве средства детектирования температуры, первое запоминающее устройство 14 и блок 15 вычисления положения в качестве средства позиционирования. Приемник 10 дополнительно включает в себя антенну 16, схему 17 тестирования и второе запоминающее устройство 18 в дополнение к вышеперечисленным элементам. В вышеперечисленных элементах по меньшей мере блок 11 приема сигналов, блок 12 обработки сигналов, датчик 13 температуры, схема 17 тестирования и второе запоминающее устройство 18 объединяются в ИС (интегральную схему) 19 на одном кристалле. Дополнительно, блок 11 приема сигналов, блок 12 обработки сигналов, датчик 13 температуры, первое запоминающее устройство 14, блок 15 вычисления положения, схема 17 тестирования и второе запоминающее устройство 18 формируются из аппаратного обеспечения электрической схемы.
Блок 11 приема сигналов соединяется с антенной 16, чтобы сигнал, переданный от искусственного спутника (не показан), принимался блоком 11 приема сигналов через антенну 16. Множество искусственных спутников, предоставляющих ГЛОНАСС, передают сигналы, имеющие частоты с интервалами в 562,5 кГц. Таким образом, приемник 10 принимает сигналы в определенной полосе частот, например, от минус седьмого канала в 1598,0625 МГц до плюс шестого канала в 1605,375 МГц. Каждый сигнал, переданный от соответствующего искусственного спутника, предоставляет информацию об орбите спутника, о состоянии спутника и времени передачи, в которое спутник передает сигнал. После того, как блок 11 приема сигналов усиливает сигнал, принятый антенной 16, блок 11 приема сигналов выполняет процесс преобразования с понижением частоты и процесс фильтрации, так что блок 11 формирует сигнал с промежуточной частотой. Блок 11 приема сигналов включает в себя полосовой фильтр, который вызывает групповую задержку на каждой из множества частот у сигналов, переданных от искусственных спутников. Сигналы, принятые блоком 11 приема сигналов, обладают определенным диапазоном полосы частот, включающим в себя каждый канал ГЛОНАСС. Соответственно, сигнал фильтруется полосовым фильтром в блоке 11 приема сигналов, чтобы удалялась ненужная полоса частот. Таким образом, формируется сигнал с промежуточной частотой.
Сигнал с промежуточной частотой, сформированный в блоке 11 приема сигналов, вводится в блок 12 обработки сигналов. Блок 12 обработки сигналов преобразует входной сигнал с промежуточной частотой в основную полосу на соответствующей частоте каждого искусственного спутника. В частности, блок 12 обработки сигналов преобразует сигнал с промежуточной частотой, отфильтрованный полосовым фильтром в блоке 11 приема сигналов, в основополосный сигнал на каждой частоте соответствующего искусственного спутника. Затем блок 12 обработки сигналов выполняет различные процессы над преобразованным основополосным сигналом, например процесс корреляции кодов и детектирования фазы, процесс отслеживания сигнала и процесс демодуляции данных, чтобы блок 12 сформировал сигнал демодуляции на каждой частоте. Когда блок 12 обработки сигналов формирует сигнал демодуляции, блок 12 прикрепляет время приема, в которое принимается сигнал от спутника. Блок 12 обработки сигналов прикрепляет время приема к сформированному сигналу демодуляции с использованием тактового генератора, не показанного и расположенного в приемнике 10. Таким образом, сигнал демодуляции включает в себя время приема, соответствующее времени, в которое принимается сигнал от каждого искусственного спутника.
Датчик 13 температуры располагается около блока 11 приема сигналов. Датчик 13 температуры детектирует температуру в положении его размещения, то есть температуру блока 11 приема сигналов, который располагается около датчика 13. Датчик 13 температуры детектирует температуру, приблизительно равную температуре блока 11 приема сигналов, когда расстояние от датчика 13 до блока 11 приема сигналов небольшое. Датчик 13 температуры выводит детектированную температуру в виде электрического сигнала в блок 15 вычисления положения. Предпочтительно разместить датчик 13 температуры очень близко к блоку 11 приема сигналов. В частности, предпочтительнее разместить блок 11 приема сигналов очень близко к датчику 13 температуры на том же кристалле, то есть на той же схеме. Когда блок 11 приема сигналов располагается близко к датчику 13 температуры, температура блока 11 приема сигналов и температура, детектированная датчиком 13 температуры, практически одинаковы. В результате повышается точность детектирования температуры у блока 11 приема сигналов с помощью датчика 13 температуры.
Первое запоминающее устройство 14 содержит запоминающий носитель, например, ROM или EEPROM, способный к хранению данных, даже когда прекращается подача электроэнергии. Первое запоминающее устройство 14 хранит данные о характеристике групповой задержки, данные температурной зависимости и данные о характеристике индивидуального отклонения изделия. Данные о характеристике групповой задержки включают в себя характеристику групповой задержки у блока 11 приема сигналов на каждой частоте. Данные температурной зависимости включают в себя зависимую от температуры характеристику задержки у блока 11 приема сигналов на каждой частоте. Данные о характеристике индивидуального отклонения изделия включают в себя характеристику задержки индивидуального отклонения изделия, присущую индивидуальному отклонению изделия у блока 11 приема сигналов на каждой частоте. Здесь данные о характеристике групповой задержки, данные температурной зависимости и данные о характеристике индивидуального отклонения изделия будут подробно объясняться позже.
Блок 15 вычисления положения корректирует время приема, расположенное в сигнале демодуляции в каждом канале, сформированном в блоке 12 обработки сигналов, в соответствии с данными о характеристике групповой задержки, данными температурной зависимости и данными о характеристике индивидуального отклонения изделия, сохраненными в первом запоминающем устройстве 14. Блок 15 вычисления положения вычисляет псевдорасстояние от соответствующего искусственного спутника, соответствующего каждому каналу, на основе скорректированного времени приема. Дополнительно блок 15 вычисления положения детектирует текущее положение в соответствии с вычисленным псевдорасстоянием от каждого искусственного спутника.
Схема 17 тестирования является схемой для детектирования отклонения во время производства. По меньшей мере отклонение во время производства, присущее индивидуальному изделию блока 11 приема сигналов, детектируется с использованием схемы 17 тестирования во время процесса производства ИС. Детектированное отклонение во время производства сохраняется как данные об уникальной характеристике во втором запоминающем устройстве 18. Второе запоминающее устройство 18 соответствует запоминающему средству индивидуального отклонения изделия. Например, колебательный контур CR встраивается в схему 17 тестирования, чтобы блок 11 приема сигналов детектировал частотный выход из колебательного контура CR. Таким образом, емкость C конденсатора и сопротивление R, относящиеся к характеристике полосового фильтра, включенного в блок 11 приема сигналов, получаются в качестве данных об уникальной характеристике блока 11 приема сигналов. Полученные данные об уникальной характеристике блока 11 приема сигналов сохраняются во втором запоминающем устройстве 18. Второе запоминающее устройство 18 формируется в виде энергонезависимого запоминающего носителя, аналогичного первому запоминающему устройству 14 на ИС 19.
Далее будут подробно объясняться данные о характеристике групповой задержки, данные температурной зависимости и данные о характеристике индивидуального отклонения изделия.
Как описано выше, полосовой фильтр в блоке 11 приема сигналов формирует отклонение характеристики групповой задержки на каждой частоте, которая соответствует объекту фильтрации. В частности, множество сигналов, имеющих разные частоты, принятых от множества искусственных спутников, имеют относительную разницу во времени на соответствующих частотах, когда сигналы фильтруются полосовым фильтром. Соответственно, первое запоминающее устройство 14 хранит групповую задержку, образованную на каждой частоте, в виде данных о характеристике групповой задержки. Как показано на фиг.2, даже когда температура в блоке 11 приема сигналов постоянно равна, например, 40°C, групповая задержка (единица измерения - наносекунды) в каждом канале отличается. На фиг.2, когда температура блока 11 приема сигналов равна 40°C, а индивидуальное отклонение изделия у блока 11 приема сигналов среднее (то есть, отклонение равно ±0%), то групповая задержка в "нулевом канале f0" задается как "стандартное значение S". Отклонение от " стандартного значения S" задается в качестве смещения групповой задержки. Как показано на фиг.2, даже когда температура постоянно равна 40°C, групповая задержка отличается на каждой частоте сигнала, то есть групповая задержка отличается в каждом искусственном спутнике, который передает сигнал. Таким образом, первое запоминающее устройство 14 хранит соотношение между частотой канала и групповой задержкой, показанной на фиг.2, в виде данных о характеристике групповой задержки, которые показывают функцию групповой задержки относительно частоты. Таким образом, блок 15 вычисления положения корректирует время приема, включенное в сигнал демодуляции на каждой частоте, сформированный в блоке 12 обработки сигналов, в соответствии с данными о характеристике групповой задержки, сохраненными в первом запоминающем устройстве 14.
Характеристика полосового фильтра в блоке 11 приема сигналов меняется по отношению к температуре, даже когда принятая частота постоянна. Соответственно, групповая задержка в блоке 11 приема сигналов имеет относительное отклонение по отношению не только к частоте, но также и к температуре. Первое запоминающее устройство 14 хранит групповую задержку, образованную при каждой температуре, в виде данных температурной зависимости. Например, как показано на фиг.2, даже когда частота блока 11 приема сигналов постоянно равна "минус седьмому каналу", групповая задержка меняется вместе с температурой. На фиг.2, когда частота равна "минус седьмому каналу", а температура блока 11 приема сигналов меняется от "115°C" до "-40°C" через "40°C", групповая задержка меняется. Групповая задержка имеет отклонение по отношению к температуре на других каналах, не применяемое только к случаю "минус седьмого канала". Таким образом, первое запоминающее устройство 14 хранит соотношение между частотой и групповой задержкой, показанное на фиг.2, в виде данных температурной зависимости, которая показывает функцию групповой задержки относительно частоты при каждой температуре, при этом функция включает в себя влияние температуры. Таким образом, первое запоминающее устройство 14 хранит соотношение между частотой и групповой задержкой в виде данных о характеристике групповой задержки и данных температурной зависимости, которые включаются друг в друга вместе с температурой. Таким образом, блок 15 вычисления положения корректирует время приема, включенное в сигнал демодуляции на каждой частоте, сформированный блоком 12 обработки сигналов, в соответствии с температурой блока 11 приема сигналов, полученной датчиком 13 температуры, и данными температурной зависимости, сохраненными в первом запоминающем устройстве 14.
Дополнительно полосовой фильтр в блоке 11 приема сигналов обладает характеристикой, которая меняется из-за индивидуального отклонения изделия, даже когда принятая частота и температура постоянны. Соответственно, групповая задержка в блоке 11 приема сигналов имеет относительное отклонение по отношению не только к частоте и температуре, но также и к индивидуальному отклонению изделия. Таким образом, первое запоминающее устройство 14 хранит групповую задержку, присущую индивидуальному отклонению изделия, в виде данных о характеристике индивидуального отклонения изделия. Данные о характеристике индивидуального отклонения изделия хранятся в первом запоминающем устройстве 14. Данные о характеристике индивидуального отклонения изделия определяются по данным об уникальной характеристике каждого индивидуального изделия блока 11 приема сигналов. Данные о характеристике получаются в виде уникальных данных о каждом индивидуальном изделии блока 11 приема сигналов с использованием схемы 17 тестирования в процессе производства ИС 19. Данные о характеристике сохраняются во втором запоминающем устройстве 18. Как показано на фиг.3, даже когда температура блока 11 приема сигналов постоянно равна 40°C и частота постоянно находится на "минус седьмом канале" или "плюс шестом канале", групповая задержка меняется относительно индивидуального отклонения изделия у блока 11 приема сигналов. На фиг.3 произведение емкости C колебательного контура CR и сопротивления R в схеме 17 тестирования используется в качестве параметра, который показывает индивидуальное отклонение изделия. На фиг.3, когда температура блока 11 приема сигналов в качестве примера равна 40°C, групповая задержка в "нулевом канале f0" в случае, где произведение емкости C и сопротивления R равно ±0%, задается в качестве "стандартного значения S". Отклонение относительно "стандартного значения S" задается в качестве смещения групповой задержки. Как показано на фиг.3, даже когда температура блока 11 приема сигналов постоянно равна 40°C и частота постоянно находится на "минус седьмом канале" или "плюс шестом канале", групповая задержка меняется относительно уникального параметра в каждом индивидуальном отклонении изделия блока 11 приема сигналов. В частности, когда меняется произведение емкости C и сопротивления R в каждом индивидуальном изделии блока 11 приема сигналов, то групповая задержка также меняется. Таким образом, первое запоминающее устройство 14 хранит соотношение между каналом и групповой задержкой при каждом параметре в виде данных о характеристике индивидуального отклонения изделия, при этом параметр показывает индивидуальное отклонение изделия. В этом случае первое запоминающее устройство 14 хранит соотношение между каналом и групповой задержкой, показанное на фиг.3, при различных температурах, включая 40°C, в виде данных о характеристике индивидуального отклонения изделия. Таким образом, блок 15 вычисления положения корректирует время приема, включенное в сигнал демодуляции на каждой частоте, сформированный в блоке 12 обработки сигналов, в соответствии с предварительно полученными данными об уникальной характеристике блока приема сигналов, сохраненными во втором запоминающем устройстве 18, и данными о характеристике индивидуального отклонения изделия, сохраненными в первом запоминающем устройстве 14.
Далее будут объясняться функции приемника 10, имеющего вышеупомянутое строение.
Блок 11 приема сигналов усиливает принятый сигнал, когда переданный от искусственного спутника сигнал принимается посредством антенны 16. Затем блок 11 выполняет процесс преобразования с понижением частоты и процесс фильтрации, используя полосовой фильтр, чтобы блок 11 сформировал сигнал с промежуточной частотой. Когда принятый сигнал фильтруется через полосовой фильтр в блоке 11 приема сигналов, в сигнале образуется групповая задержка в соответствии с соответствующей частотой.
Блок 12 обработки сигналов преобразует сигнал с промежуточной частотой, сформированный в блоке 11 приема сигналов, в основополосный сигнал на каждой частоте соответствующего искусственного спутника. Дополнительно блок 12 выполняет различные общеизвестные процессы, например процесс корреляции кодов и детектирования фазы, процесс отслеживания сигнала и процесс демодуляции данных, чтобы блок 12 сформировал сигнал демодуляции в каждом канале. Приемник 10 прикрепляет к сигналу демодуляции время, в которое сигнал принимается от спутника, в качестве времени приема, используя тактовый генератор, не показанный и расположенный в приемнике 10. Таким образом, сигнал демодуляции включает в себя время приема, соответствующее времени, в которое принимается сигнал каждого канала. Блок 15 вычисления положения корректирует время приема, включенное в сигнал демодуляции в каждом канале, сформированный в блоке 12 обработки сигналов, в соответствии с данными о характеристике групповой задержки, данными температурной зависимости и данными о характеристике индивидуального отклонения изделия, сохраненными в первом запоминающем устройстве 14.
В частности, блок 15 вычисления положения получает температуру блока 11 приема сигналов от датчика 13 и дополнительно получает данные об уникальной характеристике блока 11 приема сигналов из второго запоминающего устройства 18, чтобы скорректировать время приема, включенное в сигнал демодуляции в каждом канале, сформированный блоком 12 обработки сигналов. На основе полученной температуры и полученных данных о характеристике блока 11 приема сигналов блок 15 вычисления положения считывает из первого запоминающего устройства 14 данные о характеристике групповой задержки, данные температурной зависимости и данные о характеристике индивидуального отклонения изделия, соответствующие полученной температуре и полученным данным о характеристике. Как описано выше, данные о характеристике групповой задержки, данные температурной зависимости и данные о характеристике индивидуального отклонения изделия не существуют независимо. Когда определяется температура блока 11 приема сигналов и данные об уникальной характеристике блока 11 приема сигналов, то они получаются в виде функций частоты и групповой задержки, соответствующих температуре и данным об уникальной характеристике. Функция частоты и групповой задержки предоставляет данные о характеристике групповой задержки, включающие в себя температурную зависимость и характеристику индивидуального отклонения изделия. Блок 15 вычисления положения устанавливает смещение групповой задержки на каждой частоте на основе данных о характеристике групповой задержки, включающих в себя полученную температурную зависимость и полученную характеристику индивидуального отклонения изделия. Блок 15 вычисления положения корректирует время приема, включенное в сигнал демодуляции в каждом канале, сформированный в блоке 12 обработки сигналов, в соответствии с установленным смещением групповой задержки в каждом канале, то есть на каждой частоте.
Блок 15 вычисления положения вычисляет псевдорасстояние до искусственного спутника, соответствующего каждому каналу, в соответствии с временем приема, скорректированным на основе смещения групповой задержки и включенным в сигнал демодуляции. Затем блок вычисления положения детектирует положение приемника 10, то есть текущее положение, из вычисленного псевдорасстояния до каждого искусственного спутника. Блок 15 вычисления положения корректирует сигналы, имеющие разные частоты от множества искусственных спутников, чтобы блок 15 детектировал текущее положение в соответствии с вышеприведенной процедурой.
В первом варианте осуществления, описанном выше, первое запоминающее устройство 14 хранит данные о характеристике групповой задержки, включающие в себя характеристику групповой задержки в каждом канале, то есть на каждой частоте, данные температурной зависимости, включающие в себя характеристику групповой задержки при каждой температуре блока 11 приема сигналов, и данные о характеристике индивидуального отклонения изделия, включающие в себя характеристику групповой задержки, вызванную индивидуальным отклонением изделия в блоке 11 приема сигналов, в виде интегралов функций. Блок 15 вычисления положения корректирует время приема на основе данных о характеристике групповой задержки, данных температурной зависимости и данных о характеристике индивидуального отклонения изделия, перед тем как блок определит положение на основе сигналов, имеющих разные частоты. В частности, блок 15 вычисления положения считывает функцию, показывающую соотношение между каналом и групповой задержкой, соответствующей температуре, и данные о характеристике из первого запоминающего устройства 14 на основе температуры блока 11 приема сигналов, полученной датчиком 13 температуры, и данных об уникальной характеристике в каждом индивидуальном изделии блока 11 приема сигналов, сохраненных во втором запоминающем устройстве 18. Блок 15 вычисления положения устанавливает смещение групповой задержки в каждом канале, чтобы скорректировать время приема с использованием считанной функции, показывающей соотношение между каналом и групповой задержкой. В результате блок 15 вычисления положения корректирует время приема в каждом канале в соответствии со смещением групповой задержки, включающим в себя влияние температуры и индивидуального отклонения изделия у блока 11 приема сигналов. Соответственно, влияние температуры и индивидуального отклонения изделия у блока 11 приема сигналов снижается без усложнения исполнения, снижения производительности процесса производства, усложнения схемы, увеличения размеров и снижения чувствительности, так что точность позиционирования улучшается.
Более того, в первом варианте осуществления блок 11 приема сигналов и датчик 13 температуры размещаются на одном кристалле. Соответственно, температура датчика 13 температуры и блока 11 приема сигналов почти однородны. Таким образом, повышается точность детектирования у датчика 13 температуры касательно температуры блока 11 приема сигналов. В результате отклонение групповой задержки, вызванное температурой блока 11 приема сигналов, корректируется с высокой точностью блоком 15 вычисления положения, используя температуру, детектированную датчиком 13 температуры. Таким образом, точность позиционирования повышается еще больше.
Дополнительно в первом варианте осуществления смещение групповой задержки в каждом канале сохраняется в виде функции групповой задержки относительно частоты соответствующего канала в первом запоминающем устройстве 14. Таким образом, первое запоминающее устройство 14 хранит функцию, чтобы уменьшить объем данных, необходимый для задания смещения групповой задержки. Соответственно, используется первое запоминающее устройство 14, обладающее сравнительно небольшой емкостью.
(Модификации первого варианта осуществления)
В вышеприведенном первом варианте осуществления смещение групповой задержки в каждом канале сохраняется в виде функции групповой задержки относительно частоты соответствующего канала в первом запоминающем устройстве 14. В качестве альтернативы групповая задержка относительно частоты соответствующего канала может храниться в виде таблицы 30, показанной на фиг.4, вместо функции в первом запоминающем устройстве 14. Когда таблица 30, показанная на фиг.4, используется для установки смещения групповой задержки, блок 15 вычисления положения устанавливает смещение групповой задержки на основе данных о характеристике, сохраненных во втором запоминающем устройстве 18, и температуры блока 11 приема сигналов, детектированной датчиком 13 температуры, причем данные о характеристике показывают индивидуальное отклонение изделия у блока 11 приема сигналов. В частности, как показано на фиг.4, таблица 30 включает в себя множество двумерных таблиц на каждые данные о характеристике, то есть на каждую степень отклонения емкости C и сопротивления R. Каждая двумерная таблица содержит первую ось канала, то есть частоты, и вторую ось температуры. Таким образом, блок 15 вычисления положения извлекает смещение групповой задержки в каждом канале в соответствии с полученной температурой блока 11 приема сигналов и данными о характеристике.
Таким образом, блок 15 вычисления положения устанавливает смещение групповой задержки, относящееся к температуре блока 11 приема сигналов и данным о характеристике, показывающим индивидуальное отклонение изделия, даже когда вместо функции используется таблица 30.
Более того, и в функции и в таблице данные о характеристике групповой задержки, данные температурной зависимости и данные о характеристике индивидуального отклонения изделия включают в себя различные данные при дискретных условиях, так что температура равна "-40°C", "0°C", "40°C", "80°C" или "115°C", а данные о характеристике равны "+20%", "+10%", "±0%", "-10%" или "-20%". Соответственно, когда значение является промежуточным, может использоваться способ интерполяции или т.п. для вычисления на основе ближайших условий. Например, когда температура блока 11 приема сигналов, полученная относительно определенных данных о характеристике, равна "20°C", то время задержки при "0°C" в данных о характеристике и время задержки при "40°C" в данных о характеристике используются для способа интерполяции, чтобы найти время задержки каждой частоты при "20°C". Данные о характеристике могут быть аналогичны температуре. В этом случае нужные данные, соответствующие условию, расположенному в промежуточном дискретном условии, могут быть получены по способу интерполяции не только в случае, когда используется показанная на фиг.4 таблица, но также в случае, когда используется показанная на фиг.2 и 3 функция. Таким образом, снижается объем данных, который нужно хранить в первом запоминающем устройстве 14.
Более того, не только данные о характеристике групповой задержки, данные температурной зависимости и данные о характеристике индивидуального отклонения изделия, но также множество частот, то есть множество каналов, соответствующих множеству искусственных спутников, могут предоставляться с помощью дискретных данных в функции или таблице 30. Например, функция или таблица 30 по отношению ко всем каналам от "минус седьмого канала" до "плюс шестого канала", переданным от каждого искусственного спутника, может не храниться в первом запоминающем устройстве 14, а может храниться только функция или таблица 30 по отношению к части каналов, включающих "минус седьмой канал", "нулевой канал" и "плюс шестой канал". В этом случае функция или таблица 30 по отношению к каналам, отличным от сохраненных каналов, например "минус шестой канал", "минус пятый канал" и т.п., может вычисляться по способу интерполяции с использованием функции или таблицы 30, содержащей дискретные каналы и сохраненной в первом запоминающем устройстве 14.
В вышеприведенном варианте осуществления данные о характеристике, детектированные колебательным контуром CR в схеме 17 тестирования, сохраняются во втором запоминающем устройстве 18. В качестве альтернативы второе запоминающее устройство 18 может хранить групповую задержку индивидуального изделия блока 11 приема сигналов на предварительно установленной определенной частоте и предварительно установленной определенной температуре в качестве данных о характеристике.
Дополнительно полосовой фильтр в блоке 11 приема сигналов и второе запоминающее устройство 18 могут быть объединены в однокристальную ИС. В этом случае данные о характеристике могут включать в себя емкость C, сопротивление R и пороговое напряжение Vth транзистора, которые являются производственными условиями однокристальной ИС. В процессе проверки однокристальной ИС данные о характеристике измеряются и сохраняются во втором запоминающем устройстве 18, чтобы процесс производства однокристальной ИС выполнялся эффективно.
В вышеприведенном первом варианте осуществления блок 15 вычисления положения выполняет коррекцию по отношению к температуре и индивидуальному отклонению изделия у блока 11 приема сигналов, чтобы детектировать положение. В качестве альтернативы блок 15 вычисления положения может детектировать положение для выполнения только одной из коррекции на основе температуры блока 11 приема сигналов и коррекции на основе индивидуального отклонения изделия у блока 11 приема сигналов.
(Второй вариант осуществления)
Фиг.5 показывает основную часть приемника 10 в соответствии со вторым вариантом осуществления. Здесь, когда элемент конструкции практически такой же, как в первом варианте осуществления, элементу присваивается такой же номер ссылки, и объяснение этого элемента не описывается.
Фиг.5 - блок-схема, показывающая подробно блок 11 приема сигналов в приемнике 10 в соответствии со вторым вариантом осуществления. Блок 11 приема сигналов включает в себя малошумящий усилитель 21 (то есть LNA), полосовой фильтр 22 РЧ (радиочастоты), усилитель 23, смеситель 24, генератор 25 сигналов (то есть SG) и полосовой фильтр 26 ПЧ (промежуточной частоты). Малошумящий усилитель 21 усиливает сигнал, принятый антенной 16. Полосовой фильтр 22 РЧ включает в себя фильтр на ПАВ и т.п. Полосовой фильтр 22 РЧ удаляет ненужную частотную составляющую, включенную в сигнал, усиленный малошумящим усилителем 21. В частности, полосовой фильтр 22 РЧ позволяет пропускать сигнал в заранее определенном диапазоне полосы частот, и ослабляет сигнал, имеющий частоту вне этой полосы частот. Усилитель 23 усиливает сигнал, отфильтрованный полосовым фильтром 22 РЧ. Смеситель 24 преобразует с понижением частоты сигнал, пропущенный через полосовой фильтр 22 РЧ и усилитель 23, используя сигнал, сформированный генератором 25 сигналов. В частности, смеситель 24 и генератор 25 сигналов соответствуют блоку преобразования частоты. Когда сигнал, преобразованный с понижением частоты смесителем 24, проходит через полосовой фильтр 26 ПЧ, удаляется ненужная частотная составляющая, а затем сигнал выводится в виде сигнала с промежуточной частотой из блока 11 приема сигналов. Полосовой фильтр 26 ПЧ позволяет пропускать сигнал в заранее определенном диапазоне полосы частот, аналогично полосовому фильтру 22 РЧ, и ослабляет сигнал, имеющий частоту вне полосы частот.
Таким образом, блок 11 приема сигналов включает в себя полосовой фильтр 22 РЧ и полосовой фильтр 26 ПЧ. Соответственно, групповая задержка в принятом сигнале может возникать не только в полосовом фильтре 26 ПЧ, но также и в полосовом фильтре 22 РЧ. Во втором варианте осуществления блок 15 вычисления положения корректирует групповую задержку в полосовом фильтре 22 РЧ в соответствии с температурой блока 11 обработки сигналов.
Первое запоминающее устройство 14 хранит данные температурной зависимости и данные о характеристике групповой задержки. Данные температурной зависимости включают в себя соотношение между температурой T (°C) и значением частотной коррекции Δf (МГц), как показано на фиг.6. Данные о характеристике групповой задержки включают в себя соотношение между каналом, то есть частотой f (МГц), и групповой задержкой d (наносекунды) при стандартной температуре Ts (°C), показанной в виде сплошной линии на фиг.7. Сплошная линия на фиг.7 показывает стандартные данные температурной зависимости при стандартной температуре Ts, например, Ts = 25°C.
Канал, то есть частота f сигнала, принятого блоком 11 приема сигналов, и групповая задержка d имеют соотношение, показанное на фиг.7. В частности, групповая задержка d предоставляется функцией частоты f, то есть канала сигнала, принятого блоком 11 приема сигналов. Дополнительно соотношение между каналом, то есть частотой f, и групповой задержкой d меняется вместе с температурой. В частности, когда увеличивается температура T блока 11 приема сигналов, детектированная датчиком 13 температуры, соотношение между каналом f и групповой задержкой d сдвигается в левую сторону фиг.7, что показано пунктирной линией на фиг.7. В частности, когда канал один и тот же, соотношение сдвигается в направлении увеличения групповой задержки. Здесь пунктирная линия на фиг.7 представляет случай, где температура T равна 85°C. Величина сдвига относительно температуры соответствует значению частотной коррекции Δf. Значение частотной коррекции Δf становится большим, когда температура T увеличивается, как показано на фиг.6. В частности, когда температура блока 11 обработки сигналов выше стандартной температуры Ts, значение частотной коррекции Δf положительное. Когда температура блока 11 обработки сигналов ниже стандартной температуры Ts, значение частотной коррекции Δf отрицательное. Когда значение частотной коррекции Δf положительное, соотношение между каналом f и групповой задержкой d сдвигается в левую сторону фиг.7, то есть соотношение сдвигается в сторону, в которой групповая задержка увеличивается. С другой стороны, когда значение частотной коррекции Δf отрицательное, соотношение между каналом f и групповой задержкой d сдвигается в правую сторону фиг.7, то есть соотношение сдвигается в сторону, в которой групповая задержка уменьшается. Здесь фиг.6 показывает пример главного соотношения между температурой T и значением частотной коррекции Δf. В качестве альтернативы соотношение может быть дополнительным соотношением или другими соотношениями.
Блок 15 вычисления положения корректирует групповую задержку в полосовом фильтре 22 РЧ в связи с вышеприведенным соотношением. В частности, блок 15 вычисления положения детектирует температуру блока 11 приема сигналов с использованием датчика 13 температуры. Блок 15 вычисления положения задает значение частотной коррекции Δf в соответствии с соотношением, показанным на фиг.6, на основе детектированной температуры Td в качестве детектированной температуры. Здесь первое запоминающее устройство 14 может хранить соотношение между температурой T и значением частотной коррекции Δf, показанное на фиг.6, в виде уравнения функции температуры T. В качестве альтернативы блок 14 может хранить соотношение в виде таблицы по отношению к температуре T.
Когда задается значение частотной коррекции Δf по отношению к детектированной температуре Td, блок 15 вычисления положения сдвигает стандартные данные температурной зависимости при стандартной температуре Ts с использованием заданного значения частотной коррекции Δf, как показано на фиг.7. Блок 15 вычисления положения устанавливает стандартные данные температурной зависимости как данные температурной зависимости, как показано на фиг.8. Блок 15 вычисления положения задает групповую задержку d относительно нужного канала f, то есть канала f0 +Δf, используя заданные данные температурной зависимости, причем канал f0 +Δf подготовлен путем прибавления значения частотной коррекции Δf к исходному каналу f0. Блок 15 вычисления положения корректирует время приема, то есть групповую задержку сигнала в полосовом фильтре 22 РЧ, используя заданную групповую задержку d.
Во втором варианте осуществления корректируется не только групповая задержка сигнала с промежуточной частотой, отфильтрованного полосовым фильтром 26 ПЧ, но также и групповая задержка сигнала, отфильтрованного полосовым фильтром 22 РЧ. Когда корректируется время приема сигнала на каждой частоте, отфильтрованного полосовым фильтром 22 РЧ, независимо корректируется не только сигнал, отфильтрованный полосовым фильтром 26 ПЧ, но также и сигнал, отфильтрованный полосовым фильтром 22 РЧ. Соответственно, точность позиционирования улучшается с помощью уменьшения влияния индивидуального отклонения изделия у блока 11 приема сигналов без усложнения исполнения, снижения производительности процесса производства, усложнения схемы, увеличения размеров и снижения чувствительности.
Во втором варианте осуществления значение частотной коррекции Δf получается на основе температуры блока 11 приема сигналов, детектированной датчиком 13 температуры. Стандартные данные температурной зависимости сдвигаются на полученное значение частотной коррекции Δf. Таким образом задается групповая задержка d при детектированной температуре Td. Соответственно, данные, сохраненные в первом запоминающем устройстве 14, включают в себя по меньшей мере соотношение между температурой T и значением частотной коррекции Δf, показанное на фиг.6, и стандартные данные температурной зависимости при стандартной температуре Ts, показанные на фиг.7. Соответственно, не нужно сложное вычисление и большая емкость запоминающего устройства, и получается характеристика групповой задержки по отношению к детектированной температуре. Точность времени приема повышается, и улучшается точность позиционирования.
Вышеприведенное раскрытие изобретения обладает следующими аспектами.
В соответствии с первым аспектом настоящего раскрытия изобретения, приемник ГЛОНАСС включает в себя: блок приема сигналов для приема множества сигналов, имеющих разные частоты, от множества искусственных спутников соответственно; детектор температуры для детектирования температуры блока приема сигналов; запоминающее устройство для хранения характеристики групповой задержки каждого сигнала в блоке приема сигналов на соответствующей частоте в виде данных о характеристике групповой задержки у каждой частоты и для хранения температурной зависимости у групповой задержки каждого сигнала в блоке приема сигналов на соответствующей частоте в виде данных температурной зависимости; и вычислитель положения для коррекции времени приема каждого сигнала, имеющего соответствующую частоту, принятого блоком приема сигналов, с использованием данных о характеристике групповой задержки, сохраненных в запоминающем устройстве, для коррекции времени приема каждого сигнала на основе температуры блока приема сигналов, детектированной детектором температуры, и данных температурной зависимости, сохраненных в запоминающем устройстве, и для вычисления текущего положения в соответствии с откорректированным временем приема.
В вышеприведенном приемнике запоминающее устройство хранит данные о характеристике групповой задержки и данные температурной зависимости у характеристики групповой задержки. Данные о характеристике групповой задержки включают в себя характеристику групповой задержки у блока приема сигналов на каждой частоте. В частности, блок приема сигналов имеет разную групповую задержку на каждой частоте, вызванную, например, характеристикой полосового фильтра. Соответственно, запоминающее устройство предварительно сохраняет групповую задержку блока приема сигналов на каждой частоте в виде данных о характеристике групповой задержки. Данные температурной зависимости включают в себя зависимую от температуры характеристику задержки у групповой задержки в блоке приема сигналов на каждой частоте. Например, зависимая от температуры характеристика задержки, то есть характеристика групповой задержки полосового фильтра в блоке приема сигналов меняется вместе с температурой, даже когда частота одинакова. Соответственно, запоминающее устройство хранит зависимую от температуры характеристику задержки у блока приема сигналов в виде данных температурной зависимости. Вычислитель положения корректирует сигнал, имеющий соответствующую частоту, принятый блоком приема сигналов от каждого искусственного спутника, в соответствии с данными о характеристике групповой задержки и данными температурной зависимости. Сигнал включает в себя информацию об орбите спутника, о состоянии спутника, о времени передачи, в которое спутник передает сигнал, и т.п. Кроме того, сигнал модулируется. В частности, вычислитель положения корректирует время приема, в которое сигнал принимается от искусственного спутника, используя данные о характеристике групповой задержки в соответствии с характеристикой каждой частоты. Дополнительно вычислитель положения корректирует время приема в соответствии с температурой блока приема сигналов, детектированной детектором температуры, с использованием данных температурной зависимости. Соответственно, точность позиционирования улучшается с помощью уменьшения влияния температуры без усложнения исполнения, снижения производительности процесса производства, усложнения схемы, увеличения размеров и снижения чувствительности.
В качестве альтернативы блок приема сигналов и детектор температуры могут располагаться на одном кристалле. В этом случае средство детектирования температуры и средство приема сигналов имеют практически однородную температуру. Таким образом, в средстве детектирования температуры повышается точность детектирования температуры у средства приема сигналов. В результате, изменение характеристики у средства приема сигналов, вызванное температурой, корректируется с высокой точностью средством позиционирования с использованием температуры, детектированной средством детектирования температуры. Соответственно, точность позиционирования повышается еще больше.
В соответствии со вторым аспектом настоящего раскрытия изобретения, приемник ГЛОНАСС включает в себя: блок приема сигналов для приема множества сигналов, имеющих разные частоты, от множества искусственных спутников соответственно; запоминающее устройство индивидуального отклонения изделия для хранения характеристики блока приема сигналов, присущей индивидуальному отклонению изделия у блока приема сигналов, в виде данных об уникальной характеристике блока приема сигналов; запоминающее устройство для хранения характеристики групповой задержки у каждого сигнала в блоке приема сигналов на соответствующей частоте в виде данных о характеристике групповой задержки и для хранения характеристики задержки индивидуального отклонения изделия у каждого сигнала на соответствующей частоте, присущей индивидуальному отклонению изделия у блока приема сигналов, в виде данных о характеристике индивидуального отклонения изделия; и вычислитель положения для коррекции времени приема каждого сигнала, имеющего соответствующую частоту, принятого блоком приема сигналов, с использованием данных о характеристике групповой задержки, сохраненных в запоминающем устройстве, для коррекции времени приема каждого сигнала на основе данных об уникальной характеристике, сохраненных в запоминающем устройстве индивидуального отклонения изделия, и данных о характеристике индивидуального отклонения изделия, сохраненных в запоминающем устройстве, и для вычисления текущего положения в соответствии с откорректированным временем приема.
В вышеприведенном приемнике запоминающее устройство хранит данные о характеристике групповой задержки и данные о характеристике индивидуального отклонения изделия. Данные о характеристике групповой задержки включают в себя характеристику групповой задержки у блока приема сигналов на каждой частоте. В частности, блок приема сигналов имеет разную групповую задержку на каждой частоте, вызванную, например, характеристикой полосового фильтра. Соответственно, запоминающее устройство предварительно сохраняет групповую задержку блока приема сигналов на каждой частоте в виде данных о характеристике групповой задержки. Данные о характеристике индивидуального отклонения изделия включают в себя характеристику групповой задержки, присущую индивидуальному отклонению изделия у блока приема сигналов. Например, полосовой фильтр в блоке приема сигналов обладает характеристикой индивидуального отклонения изделия, которая меняется с каждым индивидуальным изделием, то есть характеристика групповой задержки меняется с каждым индивидуальным изделием, даже когда частота одинакова и температура одинакова. Соответственно, запоминающее устройство хранит характеристику задержки индивидуального отклонения изделия у блока приема сигналов в виде данных о характеристике индивидуального отклонения изделия. Вычислитель положения корректирует время приема сигнала, имеющего соответствующую частоту, принятого блоком приема сигналов от каждого искусственного спутника, в соответствии с данными о характеристике групповой задержки и данными о характеристике индивидуального отклонения изделия. В частности, вычислитель положения корректирует время приема в соответствии с характеристикой каждой частоты, используя данные о характеристике групповой задержки. Дополнительно вычислитель положения корректирует время приема в соответствии с индивидуальным отклонением изделия у блока приема сигналов, используя данные о характеристике индивидуального отклонения изделия в данных об уникальной характеристике блока приема сигналов, сохраненных в запоминающем устройстве индивидуального отклонения изделия. Соответственно, точность позиционирования улучшается с помощью уменьшения влияния индивидуального отклонения изделия без усложнения исполнения, снижения производительности процесса производства, усложнения схемы, увеличения размеров и снижения чувствительности.
В качестве альтернативы приемник ГЛОНАСС дополнительно может включать в себя: детектор температуры для детектирования температуры блока приема сигналов. Запоминающее устройство хранит температурную зависимость групповой задержки каждого сигнала в блоке приема сигналов на соответствующей частоте в виде данных температурной зависимости. Вычислитель положения корректирует время приема каждого сигнала на основе температуры блока приема сигналов, детектированной детектором температуры, и данных температурной зависимости, сохраненных в запоминающем устройстве.
Дополнительно, время задержки каждого сигнала на соответствующей частоте может отличаться друг от друга, когда сигнал обрабатывается в блоке приема сигналов. Время задержки каждого сигнала задается в виде групповой задержки на соответствующей частоте. Групповая задержка на каждой частоте зависит от характеристики групповой задержки блока приема сигналов, температуры блока приема сигналов и характеристики задержки индивидуального отклонения изделия у блока приема сигналов.
Кроме того, приемник ГЛОНАСС дополнительно может включать в себя: процессор сигналов. Блок приема сигналов усиливает каждый принятый сигнал и выполняет преобразование с понижением частоты и фильтрацию каждого усиленного сигнала, чтобы формировать соответствующий сигнал с промежуточной частотой. Процессор сигналов преобразует каждый сигнал с промежуточной частотой в основополосный сигнал на соответствующей частоте, выполняет корреляцию кодов и детектирование фазы, отслеживание сигнала и демодуляцию данных над каждым основополосным сигналом, чтобы формировать соответствующий сигнал демодуляции. Процессор сигналов прикрепляет время приема каждого сигнала, в которое соответствующий сигнал принимается блоком приема сигналов. Вычислитель положения корректирует время приема каждого сигнала на основе данных о характеристике групповой задержки, данных температурной зависимости и данных о характеристике индивидуального отклонения изделия. Вычислитель положения вычисляет псевдорасстояние между соответствующим искусственным спутником и приемником ГЛОНАСС в соответствии с откорректированным временем приема. Вычислитель положения вычисляет текущее положение на основе псевдорасстояния до каждого искусственного спутника.
В качестве альтернативы блок приема сигналов может включать в себя: блок преобразования частоты для преобразования каждой частоты соответствующего сигнала, принятого от соответствующего искусственного спутника, чтобы формировать сигнал с промежуточной частотой; полосовой фильтр РЧ для пропускания каждого сигнала, имеющего соответствующую частоту в заранее определенном диапазоне, перед тем, как частота сигнала преобразуется блоком преобразования частоты; и полосовой фильтр ПЧ для пропускания каждого сигнала, имеющего соответствующую частоту в заранее определенном диапазоне, после того, как частота сигнала преобразуется блоком преобразования частоты. Вычислитель положения корректирует время приема каждого сигнала на соответствующей частоте, отфильтрованного полосовым фильтром ПЧ, используя данные о характеристике групповой задержки и данные температурной зависимости, сохраненные в запоминающем устройстве. В этом случае блок приема сигналов включает в себя блок преобразования частоты, полосовой фильтр РЧ и полосовой фильтр ПЧ. Вычислитель положения корректирует время приема сигнала на каждой частоте, отфильтрованного полосовым фильтром РЧ, или сигнала на каждой частоте, отфильтрованного полосовым фильтром ПЧ, используя данные о характеристике групповой задержки и данные температурной зависимости. Таким образом, когда блок приема сигналов включает в себя полосовой фильтр РЧ и полосовой фильтр ПЧ, влияние групповой задержки растет независимо для случаев, когда сигнал фильтруется полосовым фильтром РЧ или полосовым фильтром ПЧ. Таким образом, сигнал, который нужно отфильтровать каждым фильтром, корректируется независимо, поскольку корректируется время приема сигнала на каждой частоте, отфильтрованного полосовым фильтром РЧ или полосовым фильтром ПЧ. Соответственно, точность позиционирования улучшается с помощью уменьшения влияния индивидуального отклонения изделия у средства приема сигналов без усложнения исполнения, снижения производительности процесса производства, усложнения схемы, увеличения размеров и снижения чувствительности.
В качестве альтернативы блок приема сигналов может включать в себя: блок преобразования частоты для преобразования каждой частоты соответствующего сигнала, принятого от соответствующего искусственного спутника, чтобы формировать сигнал с промежуточной частотой; полосовой фильтр РЧ для пропускания каждого сигнала, имеющего соответствующую частоту в заранее определенном диапазоне, перед тем, как частота сигнала преобразуется блоком преобразования частоты; и полосовой фильтр ПЧ для пропускания каждого сигнала, имеющего соответствующую частоту в заранее определенном диапазоне, после того, как частота сигнала преобразуется блоком преобразования частоты. Вычислитель положения корректирует время приема каждого сигнала на соответствующей частоте, отфильтрованного полосовым фильтром РЧ, используя данные о характеристике групповой задержки и данные температурной зависимости, сохраненные в запоминающем устройстве. В этом случае блок приема сигналов включает в себя блок преобразования частоты, полосовой фильтр РЧ и полосовой фильтр ПЧ. Вычислитель положения корректирует время приема сигнала на каждой частоте, отфильтрованного полосовым фильтром РЧ, или сигнала на каждой частоте, отфильтрованного полосовым фильтром ПЧ, используя данные о характеристике групповой задержки и данные температурной зависимости. Таким образом, когда блок приема сигналов включает в себя полосовой фильтр РЧ и полосовой фильтр ПЧ, влияние групповой задержки растет независимо в случаях, когда сигнал фильтруется полосовым фильтром РЧ или полосовым фильтром ПЧ. Таким образом, сигнал, который нужно отфильтровать каждым фильтром, корректируется независимо, поскольку корректируется время приема сигнала на каждой частоте, отфильтрованного полосовым фильтром РЧ или полосовым фильтром ПЧ. Соответственно, точность позиционирования улучшается с помощью уменьшения влияния индивидуального отклонения изделия у средства приема сигналов без усложнения исполнения, снижения производительности процесса производства, усложнения схемы, увеличения размеров и снижения чувствительности.
В качестве альтернативы вычислитель положения может скорректировать время приема каждого сигнала на соответствующей частоте, отфильтрованного полосовым фильтром ПЧ, используя данные о характеристике групповой задержки и данные температурной зависимости, сохраненные в запоминающем устройстве.
В качестве альтернативы, данные температурной зависимости могут включать в себя соотношение между температурой блока приема сигналов и значением частотной коррекции. Данные о характеристике групповой задержки включают в себя соотношение между каждой частотой соответствующего сигнала, принятого блоком приема сигналов, и характеристикой групповой задержки при заранее определенной стандартной температуре в виде стандартных данных температурной зависимости. Вычислитель положения задает значение частотной коррекции при детектированной температуре с использованием данных температурной зависимости в соответствии с детектированной температурой блока приема сигналов, детектированной детектором температуры, корректирует стандартные данные температурной зависимости с использованием заданного значения частотной коррекции, чтобы задать характеристику групповой задержки при детектированной температуре, и корректирует время приема каждого сигнала, отфильтрованного полосовым фильтром РЧ. В этом случае вычислитель положения корректирует время приема сигнала, отфильтрованного полосовым фильтром РЧ. В частности, вычислитель положения задает значение частотной коррекции при детектированной температуре с использованием данных температурной зависимости в соответствии с детектированной температурой блока приема сигналов, детектированной детектором температуры. Значение частотной коррекции включается в данные температурной зависимости в виде функции температуры блока приема сигналов. Вычислитель положения корректирует стандартные данные температурной зависимости с использованием заданного значения частотной коррекции. Дополнительно вычислитель положения задает характеристику групповой задержки при детектированной температуре. Как описано выше, значение частотной коррекции включается в данные температурной зависимости в виде функции температуры. С другой стороны, данные о характеристике групповой задержки включают в себя соотношение между частотой принятого сигнала и характеристикой групповой задержки в виде стандартных данных температурной зависимости при заранее определенной стандартной температуре. Когда температура блока приема сигналов меняется, стандартные данные температурной зависимости также меняются вместе с температурой. В частности, частота в данных температурной зависимости меняется на величину, соответствующую значению частотной коррекции по отношению к стандартным данным температурной зависимости. Таким образом, только когда задается детектированная температура, получаются данные температурной зависимости, скорректированные с помощью значения частотной коррекции, и характеристика групповой задержки на основе данных температурной зависимости. В результате, когда запоминающее устройство хранит стандартные данные температурной зависимости и соотношение между температурой блока приема сигналов и значением частотной коррекции, получается характеристика групповой задержки по отношению к детектированной температуре. Соответственно, не нужно сложное вычисление и большая емкость запоминающего устройства, и получается характеристика групповой задержки по отношению к детектированной температуре. Точность времени приема повышается, и улучшается точность позиционирования.
Хотя изобретение описано со ссылкой на его предпочтительные варианты осуществления, нужно понимать, что изобретение не ограничивается предпочтительными вариантами осуществления и конструкциями. Изобретение имеет целью охватить различные модификации и эквивалентные компоновки. К тому же, несмотря на различные сочетания и конфигурации, которые являются предпочтительными, другие сочетания и конфигурации, включающие в себя больше, меньше или только один элемент, также попадают в рамки сущности и объема изобретения.
Устройство позиционирования
Автомобильное устройство громкой связи и способ передачи данных
Устройство громкой связи для использования в транспортном средстве
Автомобильное устройство громкой связи и способ передачи данных
Система беспроводной связи
Электрическая линия и способ ее изготовления
Установленное на транспортном средстве устройство экстренного сообщения
Электронный блок управления и защитный кожух
Деформированная петлевая дипольная антенна
Электронный блок управления и защитный кожух
Устройство позиционирования
Автомобильное устройство громкой связи и способ передачи данных
Устройство громкой связи для использования в транспортном средстве
Автомобильное устройство громкой связи и способ передачи данных
Система беспроводной связи
Электрическая линия и способ ее изготовления
Установленное на транспортном средстве устройство экстренного сообщения
Электронный блок управления и защитный кожух
Деформированная петлевая дипольная антенна
Электронный блок управления и защитный кожух

