Результат интеллектуальной деятельности: УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству позиционирования, которое получает спутниковые сигналы от спутника GPS (глобальной системы позиционирования) и спутника GLONASS (глобальной спутниковой навигационной системы), тем самым выполняя позиционирование.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[Патентный документ 1] JP-2006-184219 A
[Патентный документ 2] JP-H7-128423 A
[Патентный документ 3] JP-2007-159106 A (USP-7358896 B2)
Например, предусмотрен приемник GPS, который принимает спутниковый сигнал от спутника GPS для выполнения позиционирования (например, обратитесь к Патентному документу 1). Согласно технической идее, описанной в Патентном документе 1, при получении спутникового сигнала от спутника GPS генератор температурной компенсации используется в качестве источника передачи опорной частоты генератора. Смещение частоты исправляется использованием кварцевого генератора температурной компенсации в качестве локального генератора; принимается сигнал GPS.
Кроме того, предусмотрен приемник GLONASS. Система GLONASS включает в себя 24 спутника. В материалах настоящей заявки 21 из них передают спутниковые сигналы в настоящее время; спутниковые сигналы принимаются приемником, выполняющим позиционирование. Разработано приемное устройство, которое совместно используется между GPS и GLONASS (например, обратитесь к Патентному документу 2). Согласно технической идее, описанной в Патентном документе 2, преобразование частоты из РЧ (радиочастоты, RF) в ПЧ (промежуточную частоту, IF) осуществляется с использованием одиночного смешанного средства (микшера и т.д.); компоненты, которые имеют отношение изображения с точки зрения частоты локального генерируемого сигнала, взаимно отделяются от смешанного сигнала для вывода с намерением устранять взаимные помехи с сигналом позиционирования, что касается каждой системы позиционирования.
Согласно технической идее, описанной в Патентном документе 3, многополосный приемник для системы глобальной спутниковой системы позиционирования (GNSS) предусмотрен, чтобы была системой, которая использует, объединенным образом, глобальную систему позиционирования (GPS), применяемую в Соединенных Штатах, глобальную спутниковую навигационную систему (GLONASS), применяемую в Российской Федерации, и систему позиционирования Galileo, созданную в Евросоюзе.
При намерении сделать функцию позиционирования высокоточной посредством комбинирования функции приемника GPS и функции приемника GLONASS, позиционирование выполняется посредством получения спутниковых сигналов обеих функций с использованием генерируемой частоты, которую генерирует локальный генератор. Однако изобретатель утверждает, что даже при таком позиционировании обе из функций не могут работать благоприятным образом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение сделано ввиду вышеприведенной ситуации. Задача состоит в том, чтобы предоставить устройство позиционирования, которое заставляет функцию позиционирования работать благоприятным образом, даже при конфигурации, где локальный генератор совместно используется между функцией GPS и функцией GLONASS.
Для достижения вышеприведенной задачи согласно примеру настоящего изобретения предложено устройство позиционирования, как изложено ниже. Устройство имеет функцию GPS, принимающую спутниковый сигнал от спутника GPS, и функцию GLONASS, принимающую спутниковый сигнал от спутника GLONASS. Включен в состав локальный генератор, который вырабатывает генерируемую частоту, при этом функция GPS демодулирует спутниковый сигнал с генерируемой частотой для выполнения позиционирования, и функция GLONASS демодулирует спутниковый сигнал с генерируемой частотой для выполнения позиционирования. В состав включена секция вычисления позиционирования, которая вычисляет частоту смещения локального генератора на основе информации о положении, которая позиционирована, информации о положении спутника, полученной от спутникового сигнала спутника GPS и вектора скорости спутника GPS, побуждает функцию GLONASS работать на основе частоты смещения и выполняет позиционирование с использованием функции GPS и функции GLONASS.
В этом случае в сочетании с влиянием изменения температуры окружающей среды и т.д., когда локальный генератор генерирует несколько генерируемых частот функции GLONASS, например, может создаваться отклонение от запланированной генерируемой частоты. В противоположность, частота смещения локального генератора рассчитывается на основе информации о положении, которая позиционирована, информации о положении спутника, полученной от спутникового сигнала спутника GPS и вектора скорости спутника GPS; функция GLONASS работает на основе частоты смещения, выполняя позиционирование с использованием функции GPS и функции GLONASS. Таким образом, отклонение становится компенсированным, даже если отклонение возникает в генерируемой частоте локального генератора. Как функция GPS, так и функция GLONASS работают благоприятным образом. При этой конфигурации, даже когда устройство позиционирования совместно использует локальный генератор между функцией GPS и функцией GLONASS, функция позиционирования побуждается работать благоприятным образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеприведенные и другие задачи, признаки и преимущества настоящего изобретения станут очевиднее из последующего подробного описания, сделанного со ссылкой на прилагаемые чертежи. На чертежах:
Фиг.1 является схемой электрической конфигурации, схематично иллюстрирующей устройство позиционирования в первом варианте осуществления настоящего изобретения;
Фиг.2 является схемой, иллюстрирующей пример подробной конфигурации секции преобразования частоты и секции получения и отслеживания спутникового сигнала;
Фиг.3 является схемой распределения частот спутниковых сигналов;
Фиг.4 является блок-схемой последовательности операций способа, схематично иллюстрирующей работу, происходящую, когда не может быть понято определенное положение устройства позиционирования;
Фиг.5 является блок-схемой последовательности операций способа, схематично иллюстрирующей работу, происходящую, когда может быть понято определенное положение устройства позиционирования; и
Фиг.6 является схемой, которая является эквивалентной фиг.2 и иллюстрирует второй вариант осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
(Первый вариант осуществления)
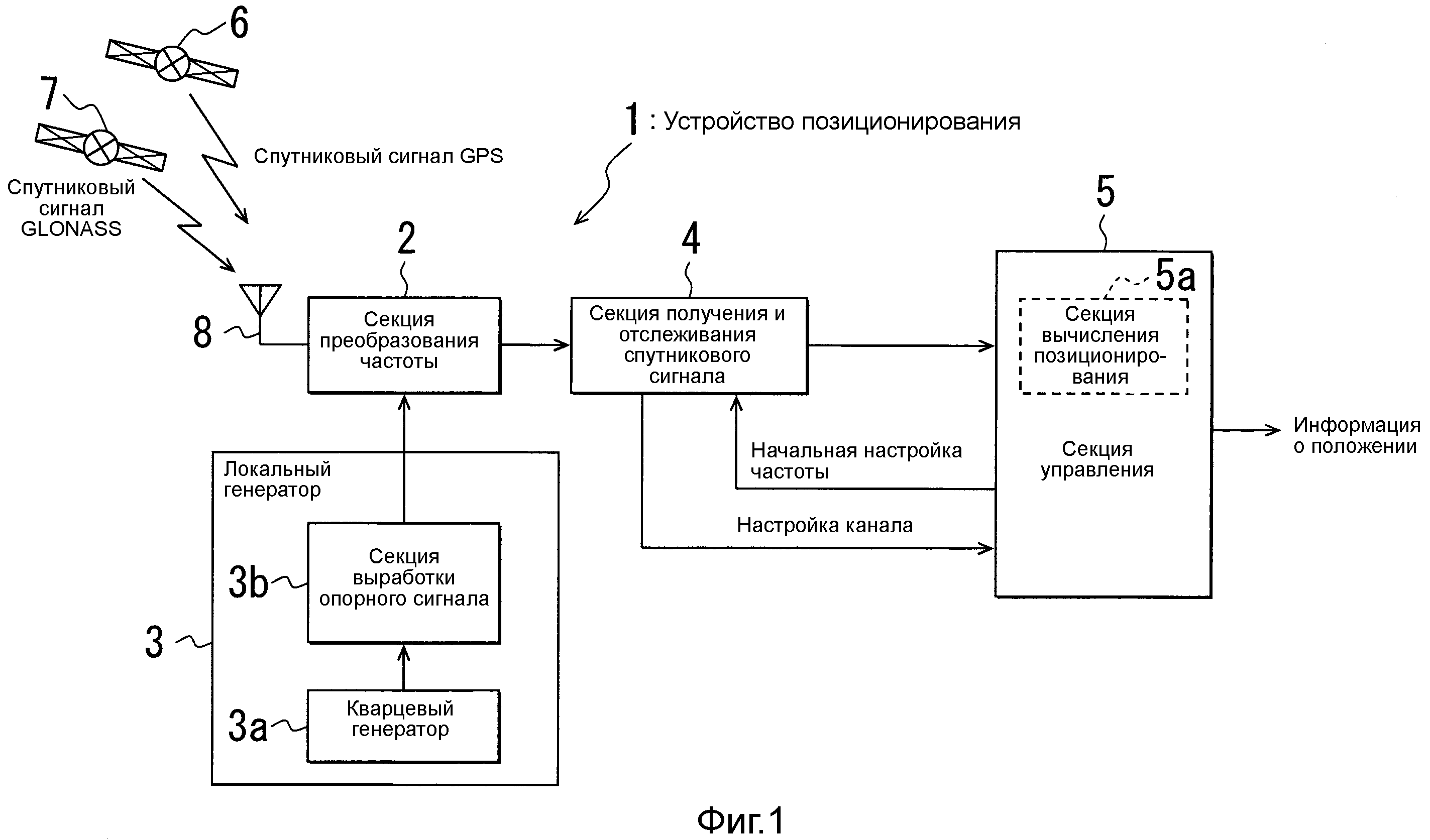
Последующее поясняет первый вариант осуществления настоящего изобретения со ссылкой на фиг. с 1 по 5. Фиг.1 схематично иллюстрирует структурную схему касательно электрической конфигурации устройства позиционирования. Как проиллюстрировано на фиг.1, устройство 1 позиционирования включает в себя секцию 2 преобразования частоты, локальный генератор 3, секцию 4 получения и отслеживания спутникового сигнала и секцию 5 управления. Секция 5 управления выводит информацию о положении наружу (например, устройство отображения (не показанное)).
Локальный генератор 3, например, включает в себя кварцевый генератор 3a. Этот кварцевый генератор 3a является вибратором, который включает в себя генератор, например, имеющий опорную частоту 16,368 [МГц]. На основе опорной частоты кварцевого генератора 3a секция 3b выработки опорного сигнала вырабатывает сигнал генерируемой частоты локального генератора 3. Секция 3b выработки опорного сигнала включает в себя схему умножения, которая выполняет умножение на N опорной частоты кварцевого генератора 3a и выводит его. Число N умножения устанавливается неизменным образом согласно каждой из спутниковой системы GPS и спутниковой системы GLONASS. Например, 96 установлено для спутниковой системы GPS; 98 установлено для спутниковой системы GLONASS.
Сигнал генерации локального генератора 3 выдается в секцию 2 преобразования частоты. Эта секция 2 преобразования частоты принимает спутниковые сигналы через антенну 8 от спутника 6 GPS и спутника 7 GLONASS. Секция 2 преобразования частоты применяет преобразование с понижением частоты к спутниковому сигналу с использованием генерируемой частоты в пределах первой полосы частот или второй полосы частот, отличной от первой полосы частот, первой и второй полос частот, которые генерирует локальный генератор 3, усиливая спутниковые сигналы после преобразования с понижением частоты на усилителе, который не показан.
Секция 4 получения и отслеживания спутникового сигнала получает и отслеживает ПЧ-сигнал спутника после преобразования с понижением частоты в отношении спутникового сигнала GPS или спутникового сигнала GLONASS, применяя генератор 4a частот с числовым программным управлением. Секция 5 управления, например, включает в себя устройство, такое как микрокомпьютер. Секция 5 управления оборудована секцией 5a вычисления позиционирования для выполнения вычисления позиционирования на основе сигналов, полученных секцией 4 получения и отслеживания спутникового сигнала и выводов информации о положении.
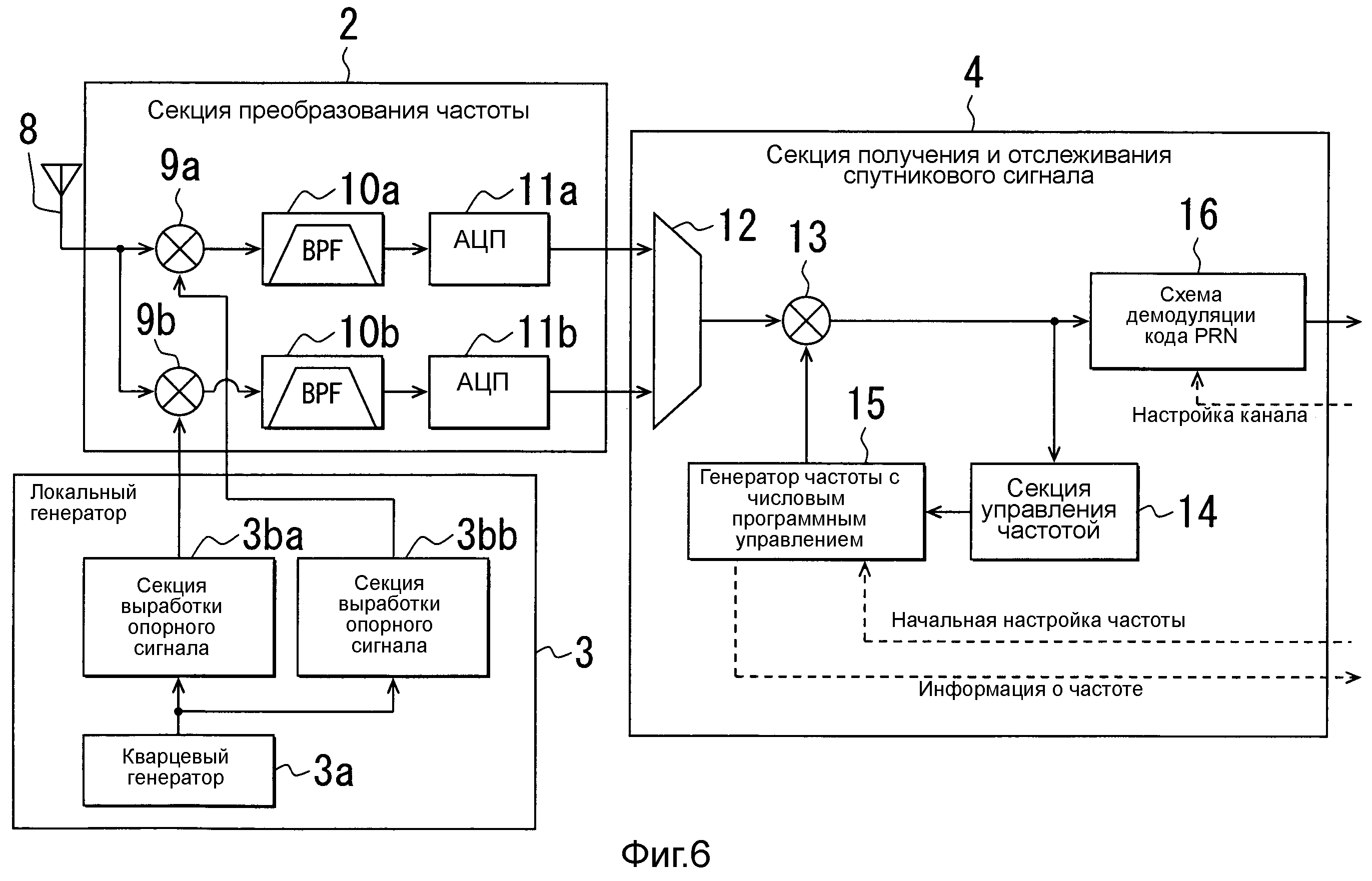
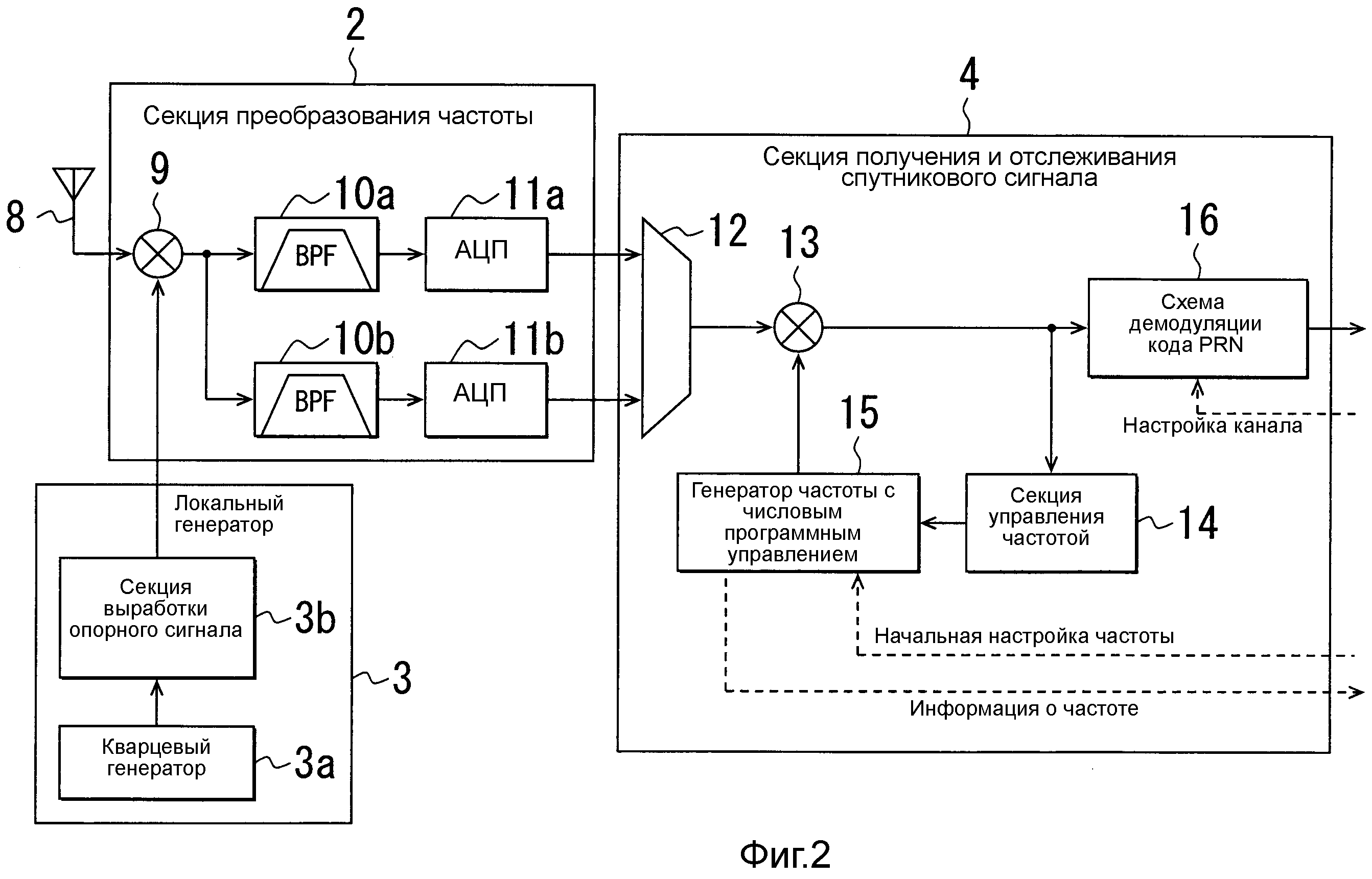
Фиг.2 является схемой, иллюстрирующей пример подробной конфигурации секции преобразования частоты и секции получения и отслеживания спутникового сигнала. Как проиллюстрировано на фиг.2, секция 2 преобразования частоты включает в себя микшер 9, полосовые фильтры 10a, 10b и аналого-цифровые (A/D) преобразователи 11a, 11b. Микшер 9 и полосовые фильтры 10a, 10b образуют аналоговую схему, выход которой соединен с аналого-цифровыми преобразователями 11a, 11b. Микшер 9 выполняет преобразование с понижением частоты согласно генерируемой частоте локального генератора 3, чтобы тем самым осуществить превращение в ПЧ-сигнал полосы промежуточных частот и вывести ПЧ-сигнал в полосовые фильтры 10a, 10b.
<Спутниковая система GPS>
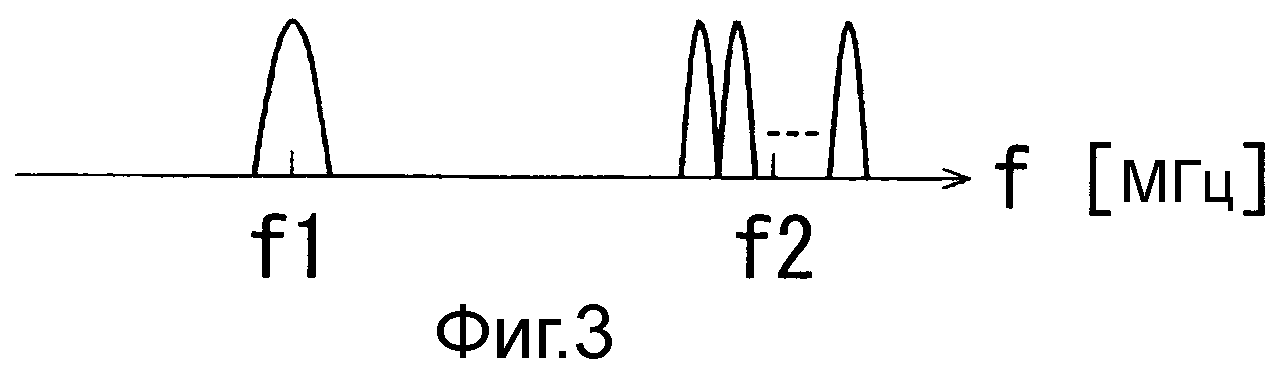
Фиг.3 схематически указывает схему распределения частот каждого спутникового сигнала. Любой один из спутников 6 GPS имеет частоту несущей спутникового сигнала GPS 1575,42 МГц, которая принадлежит полосе L. Спутниковые сигналы GPS находятся в сложном распространении в пределах частотного диапазона (первого частотного диапазона) приблизительно в 2 МГц наряду с центрированием по частоте несущей посредством выполнения модуляции с расширением спектра системы CDMA. В спутниковой системе GPS девиация частоты может возникать в значительной степени при применении кварцевого генератора 3a в качестве источника передачи опорной частоты локального генератора 3. Даже в таком случае CDMA применяется в качестве мультиплексного режима; таким образом, спутниковые сигналы GPS могут полностью демодулироваться.
В системе, использующей спутники 6 GPS, позиционирование может достигаться посредством получения, по меньшей мере, четырех спутников. GPS покрывает всю землю, используя 24 спутника. По меньшей мере, четыре спутника могут быть получены в зоне, где не существует никаких препятствий вверху (например, зоне, где здания не являются часто существующими). Однако четыре спутника не могут быть легко получены в зоне, где здания являются часто существующими, такой как центр города. Таким образом, использование только системы GPS приводит к увеличению погрешности позиционирования или резкому изменению положений.
<Спутниковая система GLONASS>
Как проиллюстрировано на фиг.3, частота несущей спутникового сигнала GLONASS устанавливается из условия, чтобы соответственные каналы имели разные частоты в пределах частотного диапазона (второго частотного диапазона) приблизительно от 1598 до 1605 [МГц], принадлежащего полосе L. Частоты несущих у спутников 7 GLONASS отличаются друг от друга; устройство 1 позиционирования принимает сигналы с использованием способа FDMA. Каждый спутник 7 GLONASS передает спутниковый сигнал на каждой частоте, который делится на двенадцать каналов.
Ширина полосы пропускания сигнала GLONASS, к которой применяется расширение спектра, имеет значение около 1 МГц. Устройство 1 позиционирования получает несущую согласно каждой частоте несущей нескольких спутников 7 GLONASS. При конфигурации по настоящему варианту осуществления генератор 15 частоты с числовым программным управлением секции 4 получения и отслеживания спутникового сигнала обуславливает генерируемую частоту согласно частоте несущей спутника 7 GLONASS.
Спутниковая система GLONASS служит в качестве полной эксплуатации в и после 2010 года. Такая спутниковая система GLONASS может комбинироваться со спутниковой системой GPS; тем самым количество спутников в центре города, которые получаются, может быть увеличено. Тем самым получение четырех или более спутников может всегда осуществляться; и может быть намечена ликвидация погрешности позиционирования или резкого изменения положений.
Генерируемая частота, которую генерирует локальный генератор 3, устанавливается из условия, чтобы частота несущей спутникового сигнала GPS и частота несущей спутникового сигнала GLONASS имели отношение изображения с точки зрения генерируемой частоты. Сигналы, которые смешивает микшер 9, заданы, чтобы быть отличными друг от друга, что касается полос частот. Полосовой фильтр 10a сконфигурирован, чтобы быть фильтром, который пропускает полосу частот в пределах частотного диапазона после преобразования с понижением частоты спутникового сигнала GPS и ослабляет другие частотные сигналы.
В противоположность, полосовой фильтр 10b сконфигурирован, чтобы быть фильтром, который пропускает полосу частот в пределах частотного диапазона после преобразования с понижением частоты спутникового сигнала GLONASS и ослабляет другие частотные сигналы.
Выходные сигналы полосовых фильтров 10a, 10b выдаются в аналого-цифровые преобразователи 11a, 11b, соответственно. Аналого-цифровой преобразователь 11a выполняет аналого-цифровое преобразование ПЧ-сигнала полосы промежуточных частот спутникового сигнала GPS и выводит его в секцию 4 получения и отслеживания спутникового сигнала. Аналого-цифровой преобразователь 11b выполняет аналого-цифровое преобразование ПЧ-сигнала полосы промежуточных частот спутникового сигнала GLONASS и выводит его в секцию 4 получения и отслеживания спутникового сигнала.
Секция 4 получения и отслеживания спутникового сигнала включает в себя селектор 12, микшер 13, секцию 14 управления частотой, генератор 15 частоты с числовым программным управлением, и схему 16 демодуляции (псевдослучайного шумового) кода PRN, которые соединены. Селектор 12 выбирает один из выходных сигналов аналого-цифровых преобразователей 11a, 11b и выдает их на микшер 13. Микшер 13 выполняет процесс подавления несущей около ПЧ-сигнала полосы промежуточных частот на основе входного сигнала генератора 15 частоты с числовым программным управлением (NCO: генератор с числовым программным управлением).
Генератор 15 частоты с числовым программным управлением генерирует синусоидальную волну частоты согласно значению настройки, когда значение настройки выдается секцией 5 управления. Когда частота для поиска спутникового сигнала GPS назначена из секции 5 управления, частота согласно значению настройки генерируется и выдается в микшер 13. Когда начальная частота для поиска спутникового сигнала GLONASS и канала спутника 7 GLONASS задана из секции 5 управления, генератор 15 частоты с числовым программным управлением генерирует частоту согласно значению настройки (частоте из частотного диапазона поиска, который упомянут позже) и выводит ее в микшер 13. Информация о выведенной частоте также выдается в секцию 5 управления.
Выходной сигнал микшера 13 выдается в секцию 14 управления частотой. Секция 14 управления частотой возвращает обратно выходной сигнал в генератор 15 частоты с числовым программным управлением; тем самым, микшер 13 дополнительно может выполнять процесс подавления упомянутого выше ПЧ-сигнала. Тем самым, только составляющая сигнала может выводиться в схему 16 демодуляции кода PRN.
Таким образом, выходной сигнал микшера 13, полученный посредством осуществления обратной связи, выдается в схему 16 демодуляции кода PRN. Схема 16 демодуляции кода PRN является схемой демодуляции, которая использует псевдослучайный код (код PRN) для демодуляции на основе псевдослучайного кода. В спутниковых сигналах GPS разные уникальные коды PRN (псевдослучайные шумовые коды) соответственно назначены нескольким спутникам 6 GPS. Устройство 1 позиционирования вырабатывает код PRN, отвечающий за каждый спутник 6 GPS, и демодулирует сигнал с обратным расширением спектра с использованием кода PRN.
В противоположность, в спутниках 7 GLONASS идентичный код PRN используется для любого одного из спутников 7 GLONASS; сигнал демодулируется обратным расширением спектра с использованием идентичного кода PRN, общего для каждого спутника 7. Затем, поскольку локальный генератор 3 генерирует с использованием кварцевого генератора 3a, создается девиация частоты около ±30 [частей на миллион]. Увеличение девиации частоты приводит к задержке во время поиска при позиционировании спутника GPS и ошибочному распознаванию канала спутника 7 GLONASS. В настоящем варианте осуществления, когда позиционирование выполняется с использованием функции GPS, вычисляется частота смещения кварцевого генератора 3a, и позиционирование спутника затем выполняется с использованием функции GLONASS на основе вычисленной частоты смещения. Последующее поясняет зависимость между генерируемой частотой локального генератора 3 и частотой смещения при выполнении преобразования с понижением частоты спутникового сигнала GPS.
Формула (1) указывает зависимость между частотой GPS, генерируемой частотой локального генератора 3 и генерируемой частотой генератора 14 с числовым программным управления.
Частота GPS + Dopsate + Doprec = (опорная частота + частота смещения) × N (постоянное значение) + (частота генератора с числовым программным управлением)... (1)
В материалах настоящей заявки Dopsate и Doprec указывают значение поправки, уникально установленное для каждого спутника 6 GPS на основе доплеровской частоты, и значение поправки на основе доплеровской частоты устройства 1 позиционирования, соответственно. Более того, опорная частота является уникальной генерируемой частотой по отношению к кварцевому генератору 3a; например, установлено 16,384 МГц. Генерируемая частота локального генератора 3 является значением вследствие частоты смещения кварцевого генератора 3a; частота получается умножением генерируемой частоты кварцевого генератора 3a N раз (обратитесь к первому элементу формулы (1)). Значение Dopsate поправки на основе доплеровской частоты может вычисляться по трем элементам положения размещения устройства 1 позиционирования, положения спутника у спутника 6 GPS и вектора скорости спутника 6 GPS.
Из трех элементов положение размещения устройства 1 позиционирования может вычисляться из условия, чтобы подвергались ссылке рабочие данные позиционирования после получения спутника 6 GPS, и подвергнутые ссылке рабочие данные использовались для вычисления. Более того, положение спутника 6 GPS включено в данные после демодуляции, примененной к спутниковому сигналу. Более того, вектор скорости спутника может вычисляться с использованием информации о траектории, включенной в принятые данные.
Когда заданы теоретическая частота несущей GPS и значение Dopsate, Doprec может вычисляться вычитанием теоретической частоты GPS и Dopsate из частоты принятого спутникового сигнала GPS. Теоретическая частота несущей GPS имеет значение 1575,42 [МГц]; таким образом,
1575,42 [МГц] + Dopsate + Doprec = (16,368 [МГц] + частота смещения) × 96 + (генерируемая частота генератора 14 частоты с числовым программным управлением)... (2)
В материалах настоящей заявки спутниковый сигнал GPS может быть получен, когда генерируемая частота генератора 15 частоты с числовым программным управлением установлена в 4084000 [Гц]. Например, на основе результата вычисления позиционирования после получения четырех спутников получаются Dopsate = -10 [кГц] и Doprec = 0. В этом случае частота смещения может быть вычислена находящейся около 20,83 [Гц] в качестве значения, с которым левая сторона и правая сторона формулы (2) сходятся друг с другом.
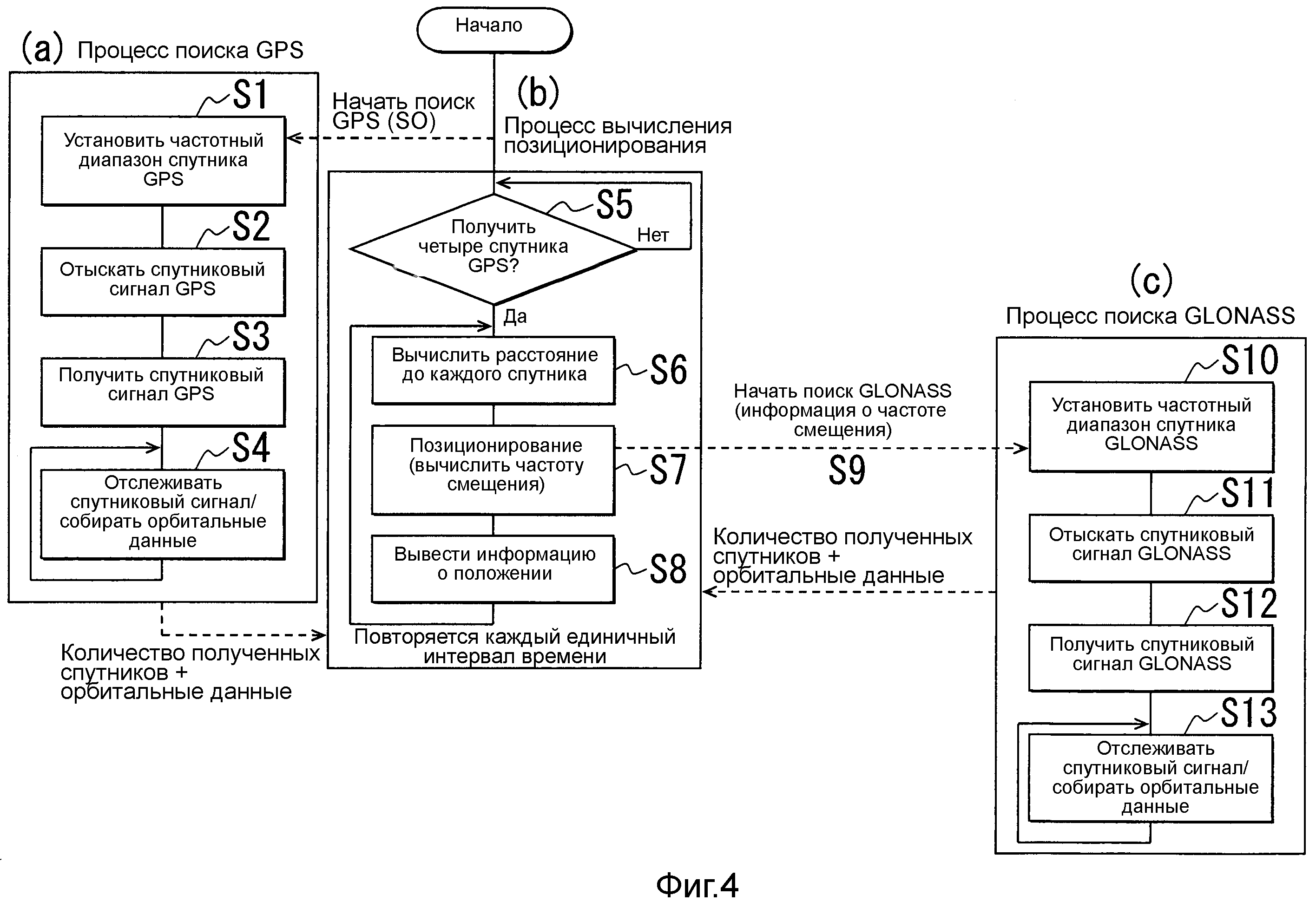
Затем работа пояснена со ссылкой на фиг.4 и 5. Фиг. с 4(a) по 4(c) в общих чертах указывают, используя блок-схемы последовательностей операций способа, процесс согласно функции GPS, процесс вычисления позиционирования и процесс согласно функции GLONASS, когда не может быть понято определенное положение самого устройства позиционирования. Процессы, главным образом, выполняются секцией 5a вычисления позиционирования из секции 5 управления.
Отмечено, что блок-схема последовательности операций способа или обработка по блок-схеме последовательности операций способа в настоящей заявке включает в себя секции (также указываемые ссылкой как этапы), которые представлены, например, в качестве S1. Кроме того, каждая секция может быть разделена на несколько подсекций наряду с тем, что несколько секций могут быть объединены в единую секцию. Более того, каждая из таким образом сконфигурированных секций может указываться ссылкой как средство и достигается не только в качестве секции программного обеспечения, но также и в качестве секции аппаратных средств.
На фиг.4(a), когда начат (S0) поиск функцией GPS, устанавливается (S1) частотный диапазон поиска спутника 6 GPS. Этот частотный диапазон поиска представлен следующей формулой (3).
Частотный диапазон поиска = (опорная частота + частота смещения) × постоянное значение N + α ± β... (3)
В материалах настоящей заявки α представляет смещение частоты поиска наряду с тем, что ±β представляет ширину по частоте поиска. В материалах настоящей заявки α ± β устанавливается из условия, чтобы левая сторона формулы (1) и левая сторона формулы (2) могли содержаться в частотном диапазоне поиска. Отмечено, что на стадии, где какой-нибудь один из спутников 6 GPS не получен, все из Dopsate, Doprec и частоты смещения не могут быть поняты. При учете особенно такой ситуации α ± β определяется из условия, чтобы ширина по частоте была большей. При учете скорости спутника 6 GPS, максимальной скорости перемещения устройства 1 позиционирования и технических условий генератора, такого как локальный генератор 3, опытным путем понимается, что существует диапазон, такой как Dopsate = ±20 [кГц], Doprec = ±1 [кГц], и частота смещения = ±490 [Гц]. Поэтому выполняется зависимость по следующей формуле (4):
(1575,42[МГц] ± 20[кГц] ± 1[кГц]) = (16,368 [МГц] ± 490 [Гц]) × 96 + α ± β... (4)
Таким образом, заданы α = 4,092 [МГц] и  Затем выполняется (S2) поиск спутникового сигнала GPS. Когда спутниковый сигнал GPS получен в результате выполнения поиска спутникового сигнала GPS, спутниковый сигнал GPS отслеживается и собираются (S3) орбитальные данные. Процесс сбора орбитальных данных повторяется (S4).
Затем выполняется (S2) поиск спутникового сигнала GPS. Когда спутниковый сигнал GPS получен в результате выполнения поиска спутникового сигнала GPS, спутниковый сигнал GPS отслеживается и собираются (S3) орбитальные данные. Процесс сбора орбитальных данных повторяется (S4).
Фиг.4(b) иллюстрирует процесс вычисления позиционирования. Как указано на фиг.4(b), в процессе вычисления позиционирования, при условии, что заданы количество полученных спутников и орбитальные данные и получены четыре спутника 6 GPS, выполняется процесс с S6 по S8 (S5: Да). На с S6 по S8 вычисляются (S6) расстояния до спутников 6 GPS; данные демодулируются для вычисления позиционирования и на основе вышеупомянутой формулы (2) вычисляется (S7) частота смещения; выводится (S8) информация о положении. Процесс с S6 по S8 повторяется для каждого единичного интервала времени. В настоящем варианте осуществления на основе частоты смещения, вычисленной на S7, спутниковый сигнал спутника 7 GLONASS, таким образом, подвергается попытке быть полученным.
Фиг.4(c) указывает процесс поиска посредством функции GLONASS. Когда начат (S9) поиск функцией GLONASS, устанавливается (S10) частотный диапазон поиска спутника GLONASS.
Принимается во внимание случай, где частота смещения вычислена, имеющей значение 164 [Гц]. Частота поиска предварительно определенного канала спутникового сигнала GLONASS установлена в 1602 [МГц]. При выполнении преобразования с понижением частоты посредством умножения на 98 опорной частоты выполняется следующая формула (5):
(1602[МГц] ± 20 [кГц] ± 1 [кГц])= (16,368 [МГц] ± 164 [Гц]) × 98 + α ± β... (5)
Значение Dopsate отличается у каждого спутника, и значение Doprec также отличается в зависимости от состояния устройства 1 позиционирования. Желательно, чтобы эти значения были заданы в пределах возможного диапазона. При условии значения, идентичного вышеупомянутому, выполняется вычисление по формуле (5); тем самым, получаются  и β = 21 [кГц]. То есть, оказывается, что частотный диапазон поиска спутникового сигнала GLONASS может быть сужен при предварительном вычислении частоты смещения в качестве 164 [Гц].
и β = 21 [кГц]. То есть, оказывается, что частотный диапазон поиска спутникового сигнала GLONASS может быть сужен при предварительном вычислении частоты смещения в качестве 164 [Гц].
Спутниковый сигнал спутника 7 GLONASS отыскивается в состоянии, где производится (S11) такая настройка. Спутниковый сигнал GLONASS получается (S12), и спутниковый сигнал спутника 7 GLONASS отслеживается для сбора орбитальных данных (S13). Процесс S13 повторяется.
Если частота смещения кварцевого генератора 3a не задана перед выполнением процесса поиска по фиг.4(c), становится трудным устанавливать точную частоту несущей. Таким образом, может возникать опасность, что ошибочно находят соседний канал. То есть это приводит к ошибочному распознаванию настройки канала спутника 7 GLONASS. В настоящем варианте осуществления частота смещения вычисляется на основе результата позиционирования, когда позиционирование выполняется функцией GPS; тем самым, сигнал спутника отыскивается функцией GLONASS. Это предохраняет соседний канал от ошибочного нахождения. То есть предотвращается ошибочное распознавание настройки канала. Количество спутников 7 GLONASS может быть получаемым без неправильной интерпретации установленного канала FDMA.
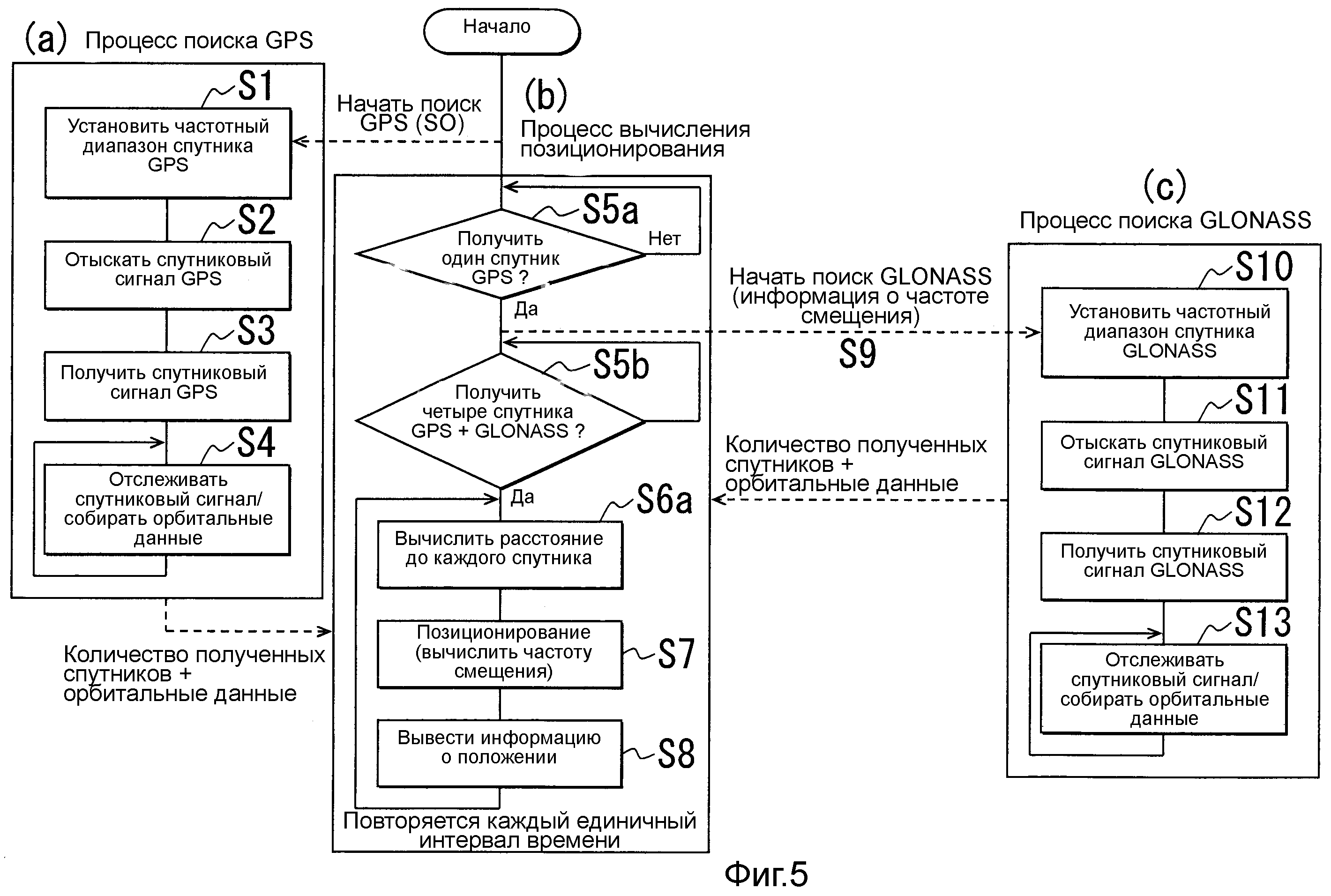
Фиг. с 5(a) по 5(c) в общих чертах указывают, используя блок-схемы последовательностей операций способа, процесс согласно функции GPS, процесс вычисления позиционирования и процесс согласно функции GLONASS, когда может быть понято определенное положение самого устройства позиционирования. Процессы выполняются секцией 5a вычисления позиционирования из секции 5 управления. Часть, отличная от фиг. с 4(a) по 4(c), пояснена посредством назначения другого номера этапа или подобного номера этапа. Фиг.5(a) указывает процесс поиска функции GPS. Как проиллюстрировано на фиг.5(a), когда начат (S0) поиск функцией GPS, устанавливается (S1) частотный диапазон функции GPS и отыскивается (S2) спутниковый сигнал GPS. Затем спутниковый сигнал GPS получается (S3). В то время как отслеживается спутниковый сигнал GPS, собираются (S4) орбитальные данные. Выводятся количество полученных спутников и орбитальные данные.
Фиг.5(b) указывает процесс вычисления позиционирования. Как проиллюстрировано на фиг.5(b), определяется получен ли спутниковый сигнал GPS, соответствующий одному спутнику (S5a). Если сигнал, соответствующий одному спутнику, может быть получен (S5a: Да), информация о смещении вычисляется по представленной информации о положении и информации о положении спутника или скорости спутника у спутника 6 GPS (информации, включенной в полученный спутниковый сигнал). Информация о смещении выдается в процесс поиска GLONASS; тем самым, начинается процесс поиска GLONASS, показанный на фиг.5(c).
В противоположность, в процессе поиска GLONASS, когда выдается информация о смещении, устанавливается (S10) частотный диапазон спутника 7 GLONASS. Несколько генерируемых частот переключаются между ними, чтобы отыскивать спутниковый сигнал (S11) GLONASS. Когда спутниковый сигнал GLONASS получен (S12), спутниковый сигнал GPS отслеживается и собираются (S13) орбитальные данные. Процесс отслеживания спутникового сигнала наряду со собором орбитальных данных повторяется, тем самым, получая необходимые спутники и орбитальные данные, которые выдаются в процесс вычисления позиционирования.
В противоположность, в процессе вычисления позиционирования определяется, становится ли общее количество полученных спутников 6 GPS и полученных спутников 7 GLONASS четырьмя спутниками (S5b). При условии, что получены четыре или более спутников (S5b: Да), вычисляется (S6a) каждое расстояние до каждого спутника. Выполняется (S7) позиционирование. Выводится (S8) информация о положении. Процесс с S6a по S8 повторяется для каждого единичного интервала времени. Информация о положении выводится непрерывно.
Посредством выполнения процесса по такой блок-схеме последовательности операций способа могут выполняться процесс поиска спутника 6 GPS, процесс поиска спутника 7 GLONASS и процесс вычисления позиционирования. Наряду с принятием во внимание информации о смещении кварцевого генератора 3a спутник 7 GLONASS может отыскиваться и получаться. Таким образом, предотвращается ошибочное распознавание настройки канала. Количество спутников 7 GLONASS является получаемым без неправильной интерпретации установленного канала FDMA.
Настоящий вариант осуществления работает, как изложено ниже. Спутниковый сигнал принимается от спутника 6 GPS. Спутниковый сигнал демодулируется, чтобы выполнять позиционирование с использованием генерируемой частоты, которую локальный генератор 3 побуждается генерировать функцией GPS. Спутниковый сигнал принимается от спутника 7 GLONASS функцией GLONASS. Спутниковый сигнал демодулируется для выполнения позиционирования посредством использования генерируемой частоты, которую генерирует локальный генератор 3. В вышеприведенном состоянии частота смещения рассчитывается на основе информации о положении, которая позиционирована, информации о положении спутника, полученной от спутникового сигнала спутника 6 GPS, и вектора скорости спутника 6 GPS; функция GLONASS работает на основе частоты смещения, выполняя позиционирование с использованием функции GPS и функции GLONASS. Таким образом, отклонение становится компенсированным, даже если отклонение возникает в генерируемой частоте локального генератора 3. Как функция GPS, так и функция GLONASS работают благоприятным образом. При этой конфигурации, даже когда устройство позиционирования совместно использует локальный генератор между функцией GPS и функцией GLONASS, функция позиционирования может достигаться благоприятным образом.
Более того, кварцевый генератор 3a применяется в качестве источника передачи, который генерирует опорную частоту, используемую в качестве опорного сигнала генерируемой частоты локального генератора 3; себестоимость снижена по сравнению с конфигурацией, включающей в себя кварцевый генератор с компенсацией температурных воздействий.
Более того, когда собственное определенное положение не может быть понято, спутниковые сигналы четырех спутников 6 GPS, посредством функции GPS, должны выполнять позиционирование, частота смещения рассчитывается на основе результата позиционирования, и спутниковый сигнал GLONASS получается на основе частоты смещения. Таким образом, когда устройство позиционирования совместно использует локальный генератор между функцией GPS и функцией GLONASS, функция позиционирования улучшается.
Более того, когда собственное определенное положение может быть понято, спутниковый сигнал одного спутника получается от спутника GPS функцией GPS, частота смещения рассчитывается на основе результата получения; спутниковый сигнал GLONASS получается на основе частоты смещения. Таким образом, когда устройство позиционирования совместно использует локальный генератор между функцией GPS и функцией GLONASS, функция позиционирования улучшается.
Кроме того, функция GPS применяется к позиционированию в первом районе, где здания не являются частыми, в обычном случае; функция GLONASS применяется к позиционированию в предварительно определенном втором районе, где высокие здания являются частыми, таком как центр города. Пригодный способ позиционирования применим для каждого района.
(Второй вариант осуществления)
Фиг.6 указывает второй вариант осуществления настоящего изобретения. Часть, отличная от вышеупомянутого варианта осуществления, состоит в том, что спутниковый сигнал GPS и спутниковый сигнал GLONASS принимаются через разные микшеры. Идентичные номера ссылок присвоены таким же частям, как у вышеупомянутого варианта осуществления, пояснение опущено, а иная часть пояснена в дальнейшем.
Как указано на фиг.6, микшеры 9a, 9b предусмотрены в качестве замены для микшера 9. Преобразование с понижением частоты спутникового сигнала GPS выполняется микшером 9a, и полосовой фильтр 10a выполняет полосовую фильтрацию составляющей сигнала. Кроме того, преобразование с понижением частоты спутникового сигнала GLONASS выполняется микшером 9b, и полосовой фильтр 10b выполняет полосовую фильтрацию составляющей сигнала. Выходные сигналы секций 3ba, 3bb выработки опорной частоты выдаются на микшеры 9a, 9b, соответственно. Секции 3ba, 3bb выработки опорной частоты выводят сигналы генерируемых частот, отличных друг от друга. К тому же в настоящем варианте осуществления может быть получен почти такой же результат, как у вышеупомянутого.
(Другие варианты осуществления)
Настоящее изобретение не ограничено вышеприведенными вариантами осуществления; например, возможна модификация или расширение, указанное ниже. После выполнения преобразования с понижением частоты спутникового сигнала GPS и спутникового сигнала GLONASS микшером 9 усилитель (не показан) вставлен в середине маршрута сигнала. Положение вставки может быть размещено в любой точке между несколькими блоками.
Вышеприведенные варианты осуществления указывают конфигурацию для использования в качестве секции 3b выработки опорного сигнала кварцевого генератора (XO), к которому не применяется температурная компенсация. Однако конфигурация может использовать кварцевый генератор с компенсацией температурных воздействий (TCXO). Когда применяется кварцевый генератор с компенсацией температурных воздействий (TCXO), девиация частоты может подавляться до ±5 [частей на миллион]; тем самым, может делаться высокой стабильность частоты. Кроме того, наряду со способностью сокращать время поиска спутника 6 GPS может быть ограничено ошибочное распознавание канала спутника 7 GLONASS.
Каждое или любая комбинация процессов, функций, секций, этапов или средств, поясненных в вышеприведенном, может быть достигнуто в качестве секции или блока программного обеспечения (например, подпрограммы) и/или секции или блока аппаратных средств (например, схемы или интегральной схемы), включая или не включая функцию связанного устройства; более того, секция или блок аппаратных средств могут быть сконструированы внутри микрокомпьютера.
Более того, секция или блок программного обеспечения или любая комбинация многочисленных секций или блоков программного обеспечения может быть включена в программу системы программного обеспечения, которая может содержаться на постоянных считываемых компьютером носителях хранения или может загружаться через сеть связи, а затем храниться на постоянных считываемых компьютером носителях хранения.
(Аспекты)
Аспекты раскрытия, описанного в материалах настоящей заявки, изложены в следующих параграфах.
В качестве аспекта раскрытия предложено устройство позиционирования, как изложено ниже.
Устройство имеет функцию GPS, принимающую спутниковый сигнал от спутника GPS, и функцию GLONASS, принимающую спутниковый сигнал от спутника GLONASS. Включен в состав локальный генератор, который вырабатывает генерируемую частоту, при этом функция GPS демодулирует спутниковый сигнал с генерируемой частотой для выполнения позиционирования, и функция GLONASS демодулирует спутниковый сигнал с генерируемой частотой для выполнения позиционирования. В состав включена секция вычисления позиционирования, которая вычисляет частоту смещения локального генератора на основе информации о положении, которая позиционирована, информации о положении спутника, полученной от спутникового сигнала спутника GPS и вектора скорости спутника GPS, побуждает функцию GLONASS работать на основе частоты смещения и выполняет позиционирование с использованием функции GPS и функции GLONASS.
В качестве необязательного аспекта раскрытия локальный генератор включен в состав в качестве источника передачи, генерирующего опорную частоту, тем самым, будучи сконфигурированным, чтобы быть недорогим по сравнению с конфигурацией, включающей в себя кварцевый генератор с компенсацией температурных воздействий.
В качестве необязательного аспекта раскрытия, когда определенное положение устройства позиционирования не может быть понято, спутниковые сигналы получаются от четырех спутников GPS с использованием функции GPS, чтобы тем самым выполнять позиционирование. Частота смещения рассчитывается на основе результата позиционирования; спутниковый сигнал GLONASS получается на основе частоты смещения. Таким образом, когда устройство позиционирования совместно использует локальный генератор между функцией GPS и функцией GLONASS, функция позиционирования улучшается.
В качестве необязательного аспекта раскрытия, когда определенное положение устройства позиционирования может быть понято, спутниковые сигналы получаются от одного спутника GPS с использованием функции GPS, чтобы тем самым выполнять позиционирование. Частота смещения рассчитывается на основе результата получения; спутниковый сигнал GLONASS получается на основе частоты смещения. Таким образом, когда устройство позиционирования совместно использует локальный генератор между функцией GPS и функцией GLONASS, функция позиционирования улучшается.
В качестве необязательного аспекта раскрытия функция GPS применяется к позиционированию в обычном случае в первом районе, где здания не являются частыми; функция GLONASS применяется к позиционированию в предварительно определенном втором районе, где высокие здания являются частыми, таком как центр города. Пригодный способ позиционирования применим для каждого района.
Специалистам в данной области техники будет очевидно, что различные изменения могут быть произведены в вышеописанных вариантах осуществления настоящего изобретения. Однако объем настоящего изобретения должен определяться последующей формулой изобретения.
Автомобильное устройство громкой связи и способ передачи данных
Устройство громкой связи для использования в транспортном средстве
Приемник глонасс
Автомобильное устройство громкой связи и способ передачи данных
Система беспроводной связи
Электрическая линия и способ ее изготовления
Установленное на транспортном средстве устройство экстренного сообщения
Электронный блок управления и защитный кожух
Деформированная петлевая дипольная антенна
Электронный блок управления и защитный кожух
Автомобильное устройство громкой связи и способ передачи данных
Устройство громкой связи для использования в транспортном средстве
Приемник глонасс
Автомобильное устройство громкой связи и способ передачи данных
Система беспроводной связи
Электрическая линия и способ ее изготовления
Установленное на транспортном средстве устройство экстренного сообщения
Электронный блок управления и защитный кожух
Деформированная петлевая дипольная антенна
Электронный блок управления и защитный кожух

