Результат интеллектуальной деятельности: СПОСОБ КЛАССИФИКАЦИИ ОБЪЕКТА, ОБНАРУЖЕННОГО ГИДРОЛОКАТОРОМ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для построения систем классификации, объектов, обнаруженных гидролокатором освещения ближней обстановки. Под объектом понимается подводный или надводный объект искусственного происхождения ограниченного размера (корабль, подводный аппарат, буй, контейнер и т.д.).
Классификация с использованием оценки радиальной протяженности объекта известна достаточно давно (Фридман А. «Изображение формы тела с помощью звуколокационной или радиолокационной системы». Зарубежная радиоэлектроника 1963 г. №8 стр.43-64). В указанной статье рассмотрены основные теоретические положения этого способа классификации. Оценка радиальной протяженности объектов по длительности эхосигналов в радиолокации подробно изложена в монографии Б.Н. Митяшев «Определение временного положения импульсов при наличии помех». Сов. радио. М. 1962 г. В связи с этим процесс измерения протяженности эхосигнала является известной операцией, которая может быть реализована на современной вычислительной аппаратуре. Механизм формирования отраженного сигнала от объекта конечной протяженности представлен на стр.48 книги А.Н. Яковлев, Г.П. Каблов «Гидролокаторы ближнего действия». Судостроение. Л. 1983 г., там же приведены принципы формирования тонкой структуры эхосигнала, позволяющие определить длительность эхосигнала
Наиболее близким аналогом, который может быть принят за прототип, является способ определения длительности эхосигнала, который реализован с помощью структурной схемы устройства, приведенного на стр.124-129 книги А.Н. Яковлев, Г.П. Каблов «Гидролокаторы ближнего действия». Судостроение. Л. 1983 г. Устройство содержит блок предварительной обработки сигналов гидролокатора, селектор эхосигнала по длительности, блок измерения длительности. Поступающие с устройства предварительной обработки эхосигналы, которые превышают пороговый уровень, поступают на селектор по дальности, где определяются границы эхосигнала, на блок измерения длительности и далее на блок принятия решения для классификации объекта. Таким образом, способ содержит следующую последовательность операций: излучение зондирующего сигнала, прием эхосигнала, измерение времени прихода эхосигнала, измерение длительности эхосигнала по превышению порога, сравнение длительности эхосигнала с эталоном и принятие решения о классе объекта.
Недостатком этого способа является то, что измеряется длительность эхосигнала от объекта только в одном канале обработки, что не всегда может характеризовать объект классификации, имеющий значительные пространственные размеры, поскольку он наблюдается одновременно в нескольких пространственных каналах.
Задачей изобретения и его техническим результатом является повышение вероятности правильной классификации обнаруженных объектов по оценке длительности эхосигнала, которая характеризует радиальную протяженность цели.
Указанный технический результат достигается тем, что в способ классификации, содержащий излучение зондирующего сигнала, прием эхосигнала, измерение времени прихода эхосигнала, измерение длительности эхосигнала от объекта, сравнение измеренной длительности эхосигнала с порогом и принятие решения о классе объекта, введены новые признаки, а именно прием эхосигнала осуществляют многоканальным приемным трактом, пространственные приемные каналы которого образуют веер статических характеристик направленности, пересекающихся на уровне, не меньшем чем 0,7 от максимума, набор временных реализаций осуществляют последовательно в каждом приемном канале; измеряют среднее значение помехи по первому циклу обработки всех пространственных каналов, определение превышения уровня эхосигнала порогового уровня помехи производят в каждом приемном канале, выбирают соседние приемные каналы, в которых произошло превышение порогового уровня помехи, определяют временные интервалы прихода эхосигнала в этих каналах и при совпадении временных интервалов суммируют значения огибающей эхосигнала в соседних каналах, определяют порог измерения длительности суммарного эхосигнала равным среднему значению уровня помехи, умноженному на число каналов, по которым производится суммирование, измеряют временную длительность суммарного эхосигнала по выбросам, превысившим порог измерения длительности суммарного эхосигнала, и классифицируют объект по сравнению временной длительности суммарного эхосигнала с эталоном.
Сущность предлагаемого способа заключается в следующем. Эхосигнал от объекта классификации формируется на основе отражения энергии падающего зондирующего сигнала на объект по нормали относительно направления прихода зондирующего сигнала гидролокатора. При отражении формируется регулярный фронт волны, характеристика которой стабильна на некотором пространственном интервале (Е.А. Штагер, Е.В. Чаевский. Рассеяние волн на телах сложной формы. М. Сов. радио 1974 г.). При этом гидролокатор принимает отраженный эхосигнал веером статических характеристик направленности. Поскольку объект находится в дальнем поле и имеет ограниченные размеры, то эхосигнал от такого отражателя представляет плоскую, мало искаженную волну и будет приниматься несколькими характеристиками направленности одновременно. Эхосигнал от совокупности случайно расположенных отражателей, которые характеризуют объекты классификации, представляет собой случайную совокупность амплитуд, которые будут приниматься характеристиками направленности независимо друг от друга. Протяженный объект будет иметь несколько отражающих точек, которые могут быть приняты в соседних характеристиках направленности с разной интенсивностью, и пересекаться они должны на уровне не более чем 0,7 от максимума. Достаточно подробно свойства таких объектов рассмотрены в известной книге «Физические основы подводной акустики» под редакцией В.И. Мясищева. Сов. радио. М. 1956 г. стр.527…537. В зависимости от типа объекта и от его протяженности число соседних пространственных каналов, в которых будут обнаружены эхосигналы от объекта, будет различным. В этой ситуации свойства сигнала в различных пространственных каналах будут различными и будут отличаться по своим характеристикам. Если измерять протяженность объектов по одной характеристике направленности, имеющей эхосигнал с максимальной амплитудой, то протяженность объекта будет определяться именно этой амплитудой и не будут учтены отражатели, которые находятся под другими углами облучения и отражения. Эхосигнал от объекта представляет собой сложную трехмерную картину сочетания амплитуд эхосигнала от различных точек по дистанции, по амплитуде и по направлению. Поэтому только сумма эхосигналов от всех отражателей в нескольких соседних пространственных каналах будет формировать обобщенную протяженность объекта локации, определяемыми всеми отражателями объекта. Можно получить суммарную характеристику отражающих точек, имеющих достаточную энергию, которую мы априорно не знаем, во всех пространственных каналах путем суммирования всех временных отсчетов по нескольким соседним пространственным каналам, которые формируются соседними характеристиками направленности статического веера. Максимальная длина объекта определит число соседних каналов, в которых будет приниматься эхосигнал, если объект будет находиться перпендикулярно к вееру характеристик направленности на дистанции обнаружения.
Таким образом, для реализации предлагаемого метода обработки необходим прием эхосигнала веером статических характеристик направленности, обнаружение эхосигнала соседними характеристиками направленности, выбор временных реализаций в соседних пространственных каналах, определение временной связи между каналами и определение числа каналов, в которых эта связь существует, после чего принимается решение о суммировании отсчетов, принятых соседними характеристиками направленности. Локальные объекты типа буя, которые имеют протяженность порядка метра, практически всегда будут находиться в 1-2 пространственных каналах. Объекты, которые имеют протяженность порядка 100 м, будут находиться в 3-5 характеристиках направленности. Большие протяженные объекты типа скал, берега или подъемов грунта будут обнаруживаться на одной дистанции в числе пространственных каналов, больше 5.
Сущность изобретения поясняется фиг.1, где приведена блок-схема устройства, реализующая рассматриваемый способ.
Устройство содержит антенну 1, коммутатор 2 приема-передачи, усилитель 3 мощности, задающий генератор 4, систему 5 формирования характеристик направленности, многоканальную систему 6 обнаружения эхосигнала, блок 7 идентификации каналов обнаружения по временному интервалу, блок 8 суммирования амплитуд огибающих эхосигналов по соседним пространственным каналам, блок 9 определения порога измерения длительности суммарной огибающей, блок 10 измерения длительности эхосигнала по суммарной огибающей, блок 11 эталонов объектов классификации, блок 12 классификации. Вход и выход антенны 1 соединен через коммутатор 2 приема передачи и усилитель 3 мощности с первым выходом задающего генератора 4. Выход коммутатора 2 соединен со входом системы 5 формирования характеристики направленности, выход которой соединен через многоканальную систему 6 обнаружения, блок 7 идентификации каналов обнаружения и блок 8 суммирования амплитуд огибающих с первым входом блока 10 измерения длительности эхосигнала по суммарной протяженности и далее с первым входом блока 12 классификации, второй вход которого соединен с блоком 11 эталонов объектов классификации. На второй вход блока 7 подается сигнал со второго выхода задающего генератора 4, который фиксирует время излучения и формирует сигнал начала роботы. Второй выход блока 6 многоканальной системы обнаружения через блок 9 выбора порога суммарной огибающей соединен со вторым входом блока 10.
Задающий генератор, усилитель мощности и коммутатор приема-передачи могут быть выполнены, например, по схеме стр.39-41. Колчеданцев А.С. Гидроакустические станции. Л. Судостроение 1982 г. Антенна и система формирования характеристик направленности являются известными устройствами, рассмотренные, например, в Л.В. Орлов, А.А. Шабров. Гидроакустическая аппаратура рыбопромыслового флота. Л. Судостроение, 1987 г. стр 116 или Смарышев М.Д. Добровольский Ю.Ю. Гидроакустические антенны. Л. Судостроение. 1984 г. Многоканальная система обнаружения является известным устройством, приведенным, например, в B.C. Бурдик Анализ гидроакустических систем. Л. Судостроение. 1988 г. стр.365. Блок 7 идентификации каналов обнаружения может быть выполнен, например, по типу цифрового регистратор типа 7502. (Справочник по гидроакустике. Л. Судостроение. 1988 г. стр. 408). Блок 9 определяет порог в зависимости от числа каналов суммирования и в простейшем варианте представляет собой умножитель порога обнаружения на число каналов суммирования. Блок 8 представляет собой практически сумматор, который суммирует число поступивших импульсов, является известным устройством и рассмотрены, например, в А.Н. Яковлев Г.П. Каблов. Гидролокаторы ближнего действия. Л. Судостроение. 1983 г. стр.94-95 или Справочник по гидроакустике. Л. Судостроение, 1988 г. стр.398. Блок 12 классификации может быть выполнен по схеме блока распознавания стр.107. или стр.116. А.Н. Яковлев, Г.П. Каблов. Гидролокаторы ближнего действия. Л. Судостроение. 1983. Блок 11 представляет собой набор эталонов объектов классификации. В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также суммирование и классификацию обнаруженных целей по сравнению измеренной оценки и эталона. Эти вопросы достаточно подробно рассмотрены в книге «Применение цифровой обработки сигналов» п\р Оппенгейма М. Мир. 1980 г.
Операции предложенного способа целесообразно рассмотреть на примере работы реализующего его устройства.
Зондирующий сигнал из задающего генератора 4, через усилитель мощности 3, поступает на коммутатор приема-передачи 2, передается на антенну 1 и излучается в водную среду.
Эхосигнал принимается антенной 1 и через коммутатор приема-передачи 4 поступает на систему 5 формирования характеристики направленности и далее на вход многоканальной системы обнаружения 6. Количество каналов определяется возможностями системы формирования характеристики направленности 5. С выхода каждого канала обработки системы 5 сигнал поступает на вход многоканальной системы обнаружения 6, где производится по первому циклу обработки измерение порогового уровня помехи по всем каналам. Обнаруженные эхосигналы с оценкой интервалов времени поступают в блок 7 идентификации каналов обнаружения по временному интервалу, в котором производится селекция эхосигналов по времени и по пространственным каналам. Сигналы, которые имеют одинаковое время обнаружения и расположены в соседних пространственных каналах, подаются в блок 8 суммирования, где производится суммирование отсчетов огибающих временных реализаций в соседних пространственных каналах, в которых произошло превышение порогового уровня помехи в одном и том же временном интервале. В блоке 9 определяется порог измерения протяженности суммарной временной реализации пропорционально количеству каналов обнаружения. В блок 10 поступает суммарная огибающая из блока 8 и значение порога измерения из блока 9.
В блоке 10 определяется временная длительность суммарной реализации, и эта оценка передается в блок 12 классификации, на второй вход которого поступают эталоны пороговых величин длительности эхосигналов для объектов, которые подлежат классификации. Таким образом, используя оценку суммарной огибающей по нескольким пространственным каналам и, измеряя длительность эхосигнала от объекта по суммарной огибающей, можно более точно измерить длительность эхосигнала объекта, что обеспечивает повышение вероятности правильной классификации обнаруженных объектов.
Способ классификации объекта, обнаруженного гидролокатором, содержащий излучение зондирующего сигнала, прием эхосигнала, измерение времени прихода эхосигнала, измерение длительности эхосигнала от объекта, сравнение измеренной длительности эхосигнала с порогом и принятие решения о классе объекта, отличающийся тем, что прием эхосигнала осуществляют многоканальным приемным трактом, пространственные приемные каналы которого образуют веер статических характеристик направленности, пересекающихся на уровне, не меньшем чем 0,7 от максимума, набор временных реализаций осуществляют последовательно в каждом приемном канале; измеряют среднее значение помехи по первому циклу обработки всех пространственных каналов, определение превышения уровня эхосигнала порогового уровня помехи производят в каждом приемном канале, выбирают соседние приемные каналы, в которых произошло превышение порогового уровня помехи, определяют временные интервалы прихода эхосигнала в этих каналах и при совпадении временных интервалов суммируют значения огибающей эхосигнала в соседних каналах, определяют порог измерения длительности суммарного эхосигнала равным среднему значению уровня помехи, умноженному на число каналов, по которым производится суммирование, измеряют временную длительность суммарного эхосигнала по выбросам, превысившим порог измерения длительности суммарного эхосигнала, и классифицируют объект по сравнению временной длительности суммарного эхосигнала с эталоном.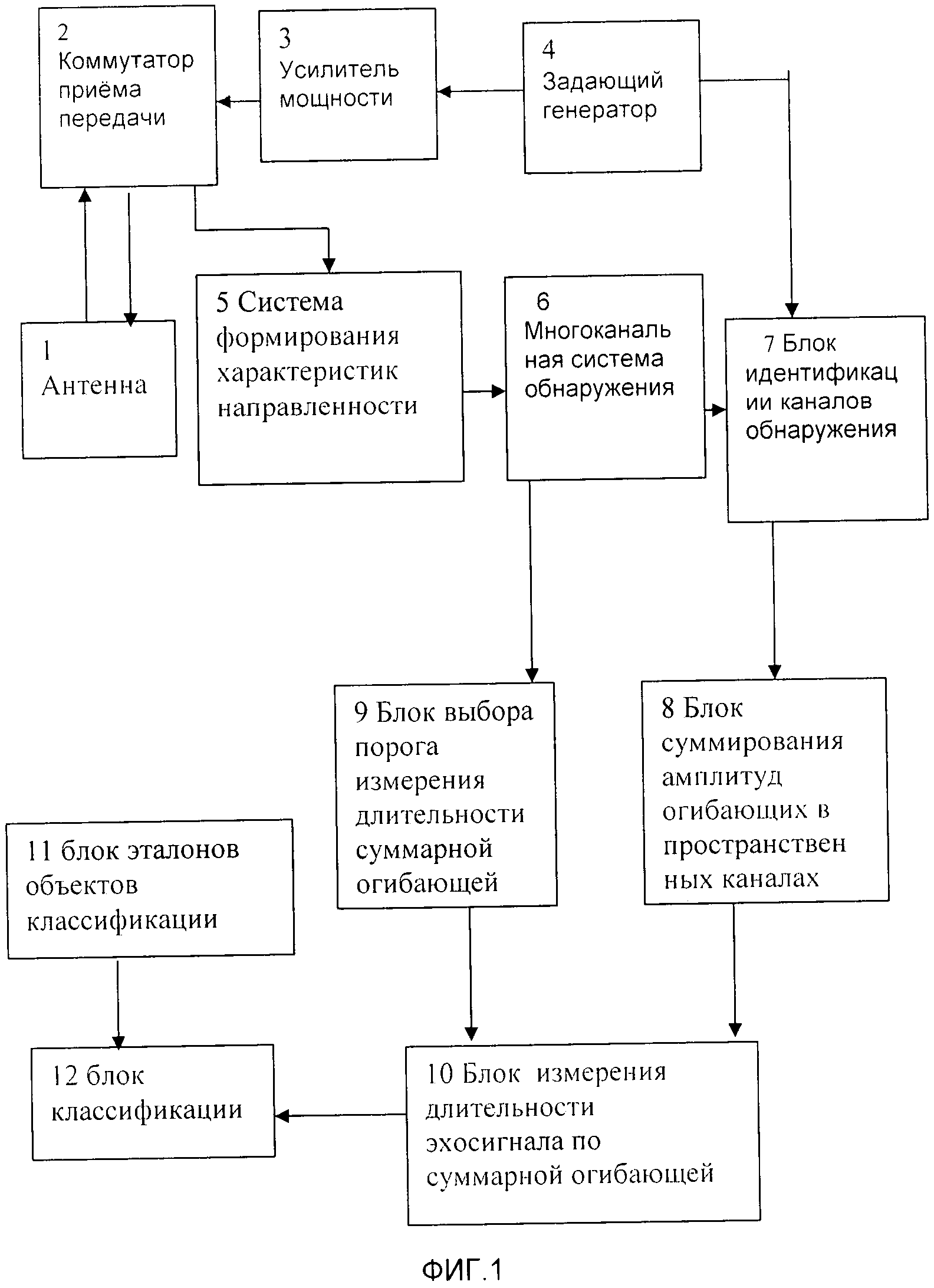
Гидроакустический способ обработки рыбопромысловой информации
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории
Способ измерения радиальной скорости объекта по его шумоизлучению
Гидроакустический способ измерения глубины погружения неподвижного объекта
Способ определения глубины погружения нижней точки айсберга
Способ автоматического обнаружения и классификации объекта в водной среде
Способ автоматического определения гидролокатором курсового угла обнаруженного объекта
Способ определения дистанции гидролокатором
Способ автоматического определения параметров айсберга гидролокационным методом
Способ классификации целей, адаптированный к гидроакустическим условиям
Гидроакустический способ обработки рыбопромысловой информации
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории
Способ измерения радиальной скорости объекта по его шумоизлучению
Гидроакустический способ измерения глубины погружения неподвижного объекта
Способ определения глубины погружения нижней точки айсберга
Способ автоматического обнаружения и классификации объекта в водной среде
Способ автоматического определения гидролокатором курсового угла обнаруженного объекта
Способ определения дистанции гидролокатором
Способ автоматического определения параметров айсберга гидролокационным методом
Способ классификации целей, адаптированный к гидроакустическим условиям

