Результат интеллектуальной деятельности: ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП
Вид РИД
Изобретение
Изобретение относится к измерительной технике и интегральной электронике и может быть использовано для одновременного измерения величин двух угловых скоростей.
Известен интегральный микромеханический гироскоп [S.E.Alper, T.Akin, A Planar Gyroscope Using a Standard Surface Micromachining Process, The 14 th European Conference on Solid-State Transducers (EUROSENSORS XIV), 2000, p.387, fig.1], содержащий подложку с расположенными на ней шестью электродами, инерционную массу, расположенную с зазором относительно подложки, образующую с парой расположенных на подложке электродов плоский конденсатор и связанную с внешним подвесом с помощью упругих балок, которые одними концами прикреплены к инерционной массе, а другими - к внешнему подвесу, образующему с двумя другими парами расположенных на подложке электродов плоские конденсаторы, используемые в качестве электростатических приводов, причем внешний подвес расположен с зазором относительно подложки с помощью системы упругих балок и опорных элементов.
Этот гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси Z, направленной перпендикулярно плоскости подложки гироскопа.
Недостатком конструкции гироскопа является невозможность измерения величины угловой скорости вокруг оси X, расположенной в плоскости подложки.
Известен интегральный микромеханический гироскоп [В.П.Тимошенков, С.П.Тимошенков, А.А.Миндеева, Разработка конструкции микрогироскопа на основе КНИ-технологии. Известия вузов. Электроника, 1999, №6, стр.49, рис.2], содержащий диэлектрическую подложку с 1 напиленными на ней четырьмя электродами и инерционную массу, расположенную с зазором относительно диэлектрической подложки, выполненную в виде пластины, образующую с парой напыленных на подложку электродов плоский конденсатор и связанную с внутренней колебательной системой с помощью упругих балок, которые одними концами жестко прикреплены к инерционной массе, а другими - к внутренней колебательной системе, образующей с другой парой напыленных на подложку электродов плоский конденсатор, используемый в качестве электростатического привода, причем колебательная система соединена с внешней рамкой с помощью упругих балок, которые одними концами прикреплены к внутренней колебательной системе, а другими - к внешней рамке, расположенной непосредственно на диэлектрической подложке.
Данный гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси Z, направленной перпендикулярно плоскости подложки гироскопа.
Недостатком конструкции гироскопа является невозможность измерения величины угловой скорости вокруг оси X, расположенной в плоскости подложки.
Известен интегральный микромеханический гироскоп [В.Я.Распопов. Микромеханические приборы. Учебное пособие, Тул. гос.университет, Тула, 2002, стр.32, рис.1.26], выбранный в качестве прототипа, содержащий диэлектрическую подложку на которой неподвижно закреплены гребенчатые структуры и внутренняя рама. На гребенчатых структурах расположены пластины электродов электростатического вибропривода. Внутренняя рама выполнена в виде прямоугольных пластин, расположенных с зазором относительно диэлектрической подложки. При этом внутренняя рама имеет точки жесткого крепления на подложке.
Две инерционные массы подвижны относительно подложки и выполнены в виде пластин с гребенчатыми структурами. На этих гребенчатых структурах расположены пластины электродов электростатического вибропривода. Гребенчатые структуры выполнены с возможностью электростатического взаимодействия с пластинами электродов, расположенных неподвижно на диэлектрической подложке, образуя при этом электростатический вибропривод.
На инерционных массах закреплены пластины электродов, образующие с пластинами электродов, закрепленными на диэлектрической подложке, плоские конденсаторы, которые являются датчиками угловых колебаний инерционных масс относительно диэлектрической подложки.
Инерционные массы связаны с внутренней рамой через упругие балки, которые одними концами жестко соединены с инерционными массами, а другими - с внутренней рамой. Упругие балки выполнены с возможностью совершения поступательных колебаний инерционных масс в плоскости диэлектрической подложки, за счет геометрических размеров упругих балок.
Гребенчатые структуры электростатического вибропривода расположены на диэлектрической подложке.
Две инерционные массы, упругие балки, внутренняя рама расположены с зазором относительно диэлектрической подложки.
Этот гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси X, расположенной в плоскости диэлектрической подложки.
Недостатком конструкции этого гироскопа является невозможность одновременного измерения двух угловых скоростей: вокруг осей Х и Y, расположенных в плоскости диэлектрической подложки гироскопа.
Задачей предлагаемого изобретения является создание интегрального микромеханического гироскопа, позволяющего проводить измерения угловых скоростей вокруг двух, взаимно перпендикулярных осей Х и Y, расположенных в плоскости подложки.
Интегральный микромеханический гироскоп, так же как в прототипе, содержит диэлектрическую подложку, два датчика угловых колебаний, две инерционные массы, подвижные относительно диэлектрической подложки, и выполненные в виде пластин с гребенчатыми структурами. На гребенчатых структурах расположены пластины электродов электростатического вибропривода. Инерционные массы связаны с внутренней рамой через упругие балки, которые одними концами соединены с инерционными массами, а другими с внутренней рамой. При этом инерционные массы с гребенчатыми структурами и упругие балки расположены с зазором относительно диэлектрической подложки.
Согласно изобретению на внутренней раме с двух противоположных сторон закреплены гребенчатые структуры, на которых расположены пластины электродов, выполненные с возможностью электростатического взаимодействия с пластинами электродов, расположенных на инерционных массах, образуя при этом электростатический вибропривод. Внутренняя рама закреплена в наружной раме с помощью двух торсионов, которые одними концами, прикреплены к внутренней раме, а другими к наружной раме. Наружная рама закреплена в основании с помощью двух торсионов, которые одними концами, прикреплены к наружной раме, а другими к основанию. Основание расположено на диэлектрической подложке и выполнено в виде прямоугольной рамы. Наружная рама, торсионы, внутренняя рама и закрепленные на ней гребенчатые структуры расположены с зазором относительно диэлектрической подложки, а упругие балки выполнены с возможностью совершения поступательных колебаний инерционных масс вдоль оси, перпендикулярной плоскости диэлектрической подложки. На внутренней раме с двух противоположных сторон закреплены пластины электродов, образующие с пластинами электродов, закрепленными на наружной раме, датчик угловых колебаний внутренней рамы относительно наружной рамы. На наружной раме с двух противоположных сторон, закреплены пластины электродов, образующие с пластинами электродов, закрепленными на основании, датчик угловых колебаний наружной рамы относительно основания.
Инерционные массы, внутренняя и наружная рамы, основание, торсионы, упругие балки и гребенчатые структуры выполнены из поликристаллического или монокристаллического кремния.
Таким образом, предложенное закрепление внутренней рамы в наружной раме, которая закреплена в основании, расположенном на диэлектрической подложке, позволяет изменить направление колебаний инерционных масс, а расположение электростатического вибропривода и датчиков угловых колебаний позволяет измерять величины угловых скоростей поворота основания вокруг осей Х и Y, расположенных взаимно перпендикулярно в плоскости подложки.
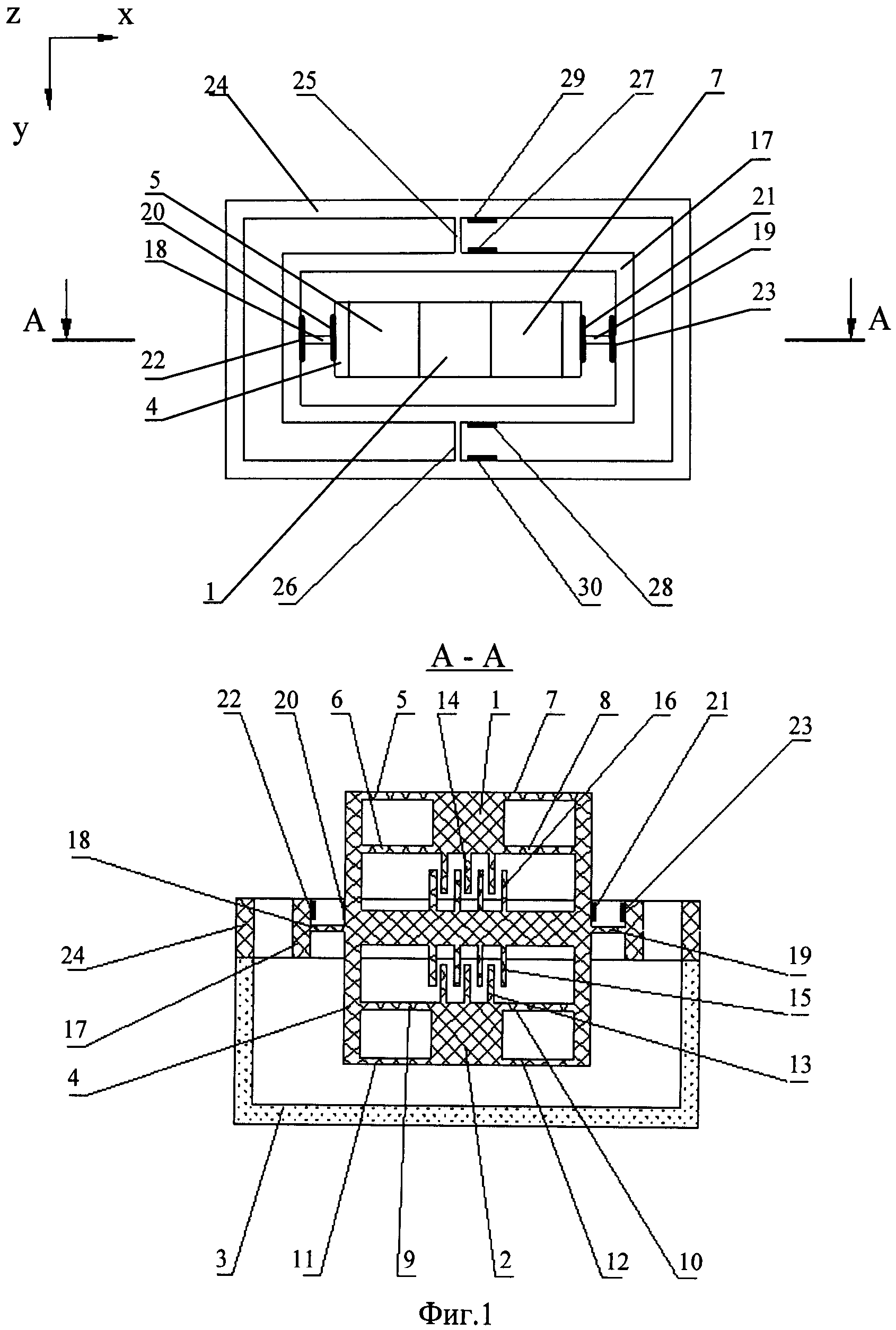
На фиг.1 приведена топология и сечение предлагаемого интегрального микромеханического гироскопа.
Интегральный микромеханический гироскоп содержит две инерционные массы 1, 2, выполненные в виде пластин. Инерционные массы 1, 2 подвижны относительно диэлектрической подложки 3.
Инерционная масса 1 закреплена во внутренней раме 4 с помощью четырех упругих балок 5, 6, 7, 8. Упругие балки 5,6, 7, 8 жестко прикреплены одними концами к внутренней раме 4, а другими - к инерционной массе 1. Упругие балки 5, 6, 7, 8, размещены в интегральном микромеханическом гироскопе с возможностью совершения поступательных колебаний инерционной массы 1 вдоль оси Z, перпендикулярной плоскости диэлектрической подложки 3 за счет геометрических размеров упругих балок.
Инерционная масса 2 закреплена во внутренней раме 4 с помощью четырех упругих балок 9, 10, 11, 12. Внутренняя рама 4 выполнена в виде прямоугольных пластин, расположенных с зазором относительно диэлектрической подложки 3. Упругие балки 9, 10, 11, 12 жестко прикреплены одними концами к внутренней раме 4, а другими - к инерционной массе 2. Упругие балки 9, 10, 11, 12, размешены в интегральном микромеханическом гироскопе с возможностью совершения поступательных колебаний инерционной массы 2 вдоль оси Z, перпендикулярной плоскости диэлектрической подложки 3.
На инерционных массах 1, 2 закреплены гребенчатые структуры, на которых расположены пластины 13, 14.
На внутренней раме 4 с двух противоположных сторон, закреплены гребенчатые структуры, на которых расположены пластины электродов 15, 16, выполненные с возможностью электростатического взаимодействия с пластинами электродов 13, 14, образуя при этом электростатический вибропривод.
Внутренняя рама 4 закреплена в наружной раме 17 с помощью двух торсионов 18, 19, которые жестко прикреплены одними концами к наружной раме 17, а другими - к внутренней раме 4.
На внутренней раме 4, с двух противоположных сторон, закреплены пластины электродов 20, 21, образующие с пластинами электродов 22, 23, закрепленными на наружной раме 17, плоские конденсаторы, которые являются датчиками угловых колебаний внутренней рамы 4 относительно прямоугольной наружной рамы 17.
Основание 24 гироскопа расположено непосредственно на диэлектрической подложке 3 и выполнено в виде прямоугольной рамы.
Наружная рама 17 закреплена в основании 24 гироскопа с помощью двух торсионов 25, 26, которые жестко прикреплены одними концами к наружной раме 17, а другими - к основанию 24.
На наружной раме 17, с двух противоположных сторон, закреплены пластины электродов 27, 28, образующие с пластинами электродов 29, 30, закрепленными на основании 24, плоские конденсаторы, которые являются датчиками угловых колебаний наружной рамы 17 относительно основания 24.
Инерционные массы 1, 2, восемь упругих балок 5, 6, 7, 8, 9, 10, 11, 12, гребенчатые структуры, на которых расположены пластины 13, 14, гребенчатые структуры, на которых расположены пластины электродов 15, 16, внутренняя рама 4, наружная рама 17, торсионы 18, 19, 25, 26, основание выполнены из поликристаллического или монокристаллического кремния и расположены с зазором относительно диэлектрической подложки 3.
Диэлектрическая подложка 3 может быть изготовлена из боросиликатного стекла.
Работает устройство следующим образом.
При подаче на пластины электродов 14, 16 и 13, 15 электростатического вибропривода переменных напряжений, сдвинутых относительно друг друга на 180°, между пластинами электродов 14, 16 и 13, 15 возникает электростатическое взаимодействие, что приводит к возникновению колебаний инерционных масс 1, 2 в плоскости, перпендикулярной диэлектрической подложке 3 вдоль оси Z, за счет изгиба упругих балок 5, 6, 7, 8, 9, 10, 11, 12, соединяющих инерционные массы 1,2 с внутренней рамой 4. Векторы скоростей колебания масс 1, 2 находятся в противофазе друг к другу. При этом угловых колебаний внутренней рамы 4 относительно наружной рамы 17, а так же угловых колебаний наружной рамы 17 относительно основания 24 не происходит. Напряжения, генерируемые на датчиках угловых колебаний, образованных пластинами электродов 20, 22 и 21, 23, а так же 27, 29 и 28, 30 соответственно одинаковы.
При возникновении вращения (угловой скорости) диэлектрической подложки 3 вокруг оси X, расположенной в плоскости диэлектрической подложки 3, возникают силы Кориолиса. Под действием сил Кориолиса приложенным к центрам инерционных масс 1, 2, внутренняя рама 4 и инерционные массы 1, 2 начинают совершать угловые колебания относительно наружной рамы 17 за счет кручения торсионов 18, 19. Разность напряжений, генерируемых на датчиках угловых колебаний, образованных пластинами электродов 20 и 22, а также 21 и 23, расположенными на внутренней раме 4 и наружной раме 17, соответственно, за счет изменения угла между ними, характеризует величину измеряемой угловой скорости. Амплитуда этих колебаний является мерой угловой скорости, а фаза говорит о направлении скорости. Напряжения, генерируемые в датчиках угловых колебаний, образованных электродами 27 и 29, а так же 28 и 30, не изменяются.
При возникновении вращения (угловой скорости) диэлектрической подложки 3 вокруг оси Y, расположенной в плоскости диэлектрической подложки 3, возникают силы Кориолиса. Под действием сил Кориолиса приложенным к центрам инерционных масс 1, 2, наружная рама 17 начинает совершать угловые колебания относительно основания 24 за счет изгиба торсионов 25, 26. Разность напряжений, генерируемых на датчиках угловых колебаний образованных пластинами электродов 27 и 29, а так же 28 и 30, расположенными на наружной раме 17 и основании 24, соответственно, за счет изменения величины угла между ними, характеризует величину измеряемой угловой скорости. Амплитуда этих колебаний является мерой угловой скорости, а фаза говорит о направлении скорости. Напряжения, генерируемые в датчиках угловых колебаний, образованных пластинами электродов 20 и 22, а также 21 и 23, не изменяются.
Таким образом, предлагаемое устройство представляет собой интегральный микромеханический гироскоп, позволяющий одновременно измерять величины угловых скоростей вокруг осей Х и Y, расположенных взаимно перпендикулярно в плоскости диэлектрической подложки 3.
Интегральный микромеханический гироскоп
Микромеханический акселерометр
Интегральный микромеханический гироскоп
Микромеханический акселерометр
Интегральный микромеханический гироскоп
Микромеханический гироскоп
Микромеханический гироскоп
Трёхосевой микромеханический акселерометр
Двухосевой микромеханический акселерометр

