Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ
Вид РИД
Изобретение
Предлагаемый способ управления может быть использован в космической технике при сближении и последующей стыковке двух космических объектов, находящихся на околокруговой орбите небесного объекта, например пилотируемого космического корабля, выводимого ракетоносителем (РН) в качестве активного космического объекта (АКО) и международной космической станцией (МКС), в качестве пассивного космического объекта (ПКО).
Известен способ управления, выбранный в качестве аналога, в котором для обеспечения сближения и последующей стыковке двух космических объектов, АКО выводится в плоскость орбиты ПКО. Как правило, средняя высота орбиты ПКО находится выше средней высоты орбиты выведения АКО и поэтому после выведения и определения параметров орбиты выведения проводится расчет первых двух импульсов сближения, с помощью которых АКО переводится на так называемую орбиту фазирования, на которой осуществляется ликвидация начального углового рассогласования между двумя объектами. Это происходит вследствие того, что угловая скорость вращения вокруг небесного тела у АКО выше, чем у ПКО. После нескольких витков (число определяется выбранной баллистической схемой сближения) и определения текущих параметров орбиты проводится расчет двухимпульсного маневра, с помощью которого АКО переводится в окрестность ПКО, где сближение завершается автоматической стыковкой. Такой способ управления активным кораблем, применяемый при сближении и стыковке пилотируемых и грузовых АКО с МКС, требует выведения активного корабля в плоскость орбиты МКС [1]. При этом начальный фазовый угол между космическими объектами произволен, что требует определенного времени для его ликвидации. Кроме того определенное время при этом способе затрачивается на выполнение стандартных технологических операций, таких как определение орбиты по данным радиоконтроля орбиты с наземных измерительных пунктов (НИП) и последующее определение характеристик импульсов сближения в Центре управления полетом, а также передача полученных данных в бортовой вычислительный комплекс (БВК) АКО. Из-за ограничений по зонам видимости НИПов, т.к. только часть полетных витков наблюдаемы, приходится разбивать проведение таких технологических операций на несколько суток, привязывая их к зонам видимости. Это, в свою очередь, требует увеличения автономного полета АКО до стыковки (в настоящее время это составляет около 34 витков или почти 50 часов). Данное обстоятельство приводит к дополнительной нагрузке на экипаж пилотируемого АКО, вынужденного продолжительное время находиться в стесненных условиях ограниченного объема космического корабля и практически совсем неприемлемо при реализации спасательной миссии на МКС, когда фактор времени сближения становится решающим.
Известен способ управления движением АКО, стыкуемого с ПКО, выбранный в качестве прототипа. Этот способ разработан для проведения сближения американского АКО «Джемини-11» с третьей ступенью РН «Аджена» за короткое время в течение одного витка. Используя выгодное расположение стартовой позиции космодрома на мысе Канаверал с районами падения первой и второй ступени РН, находящимися в Атлантическом Океане, вначале выводился ПКО в восходящую часть витка орбиты с наклонением 28.84°. Затем, через виток, но уже в нисходящую часть витка на опорную орбиту, совпадающую с плоскостью орбиты ПКО, выводился АКО «Джемини-11» с заданным угловым рассогласованием между объектами около 4°. Такой начальный фазовый угол позволял завершить фазирование АКО и оказаться в окрестности ПКО за один виток. Через 50 минут после выведения АКО «Джемини-11» оказался в апогее своей орбиты и примерно в 50 км позади от ПКО в зоне действия бортового радиолокатора сближения, позволяющего получить фактические параметры относительного вектора состояния АКО в орбитальной системе, связанной с ПКО. После приложения импульсов сближения, характеристики которых были получены по фактическому вектору состояния, АКО приводился в окрестность ПКО. Данный полет завершился успешной стыковкой АКО «Джемини-11» со ступенью РН «Аджена» через 1 час 34 минуты после выведения, что на сегодняшний момент является лучшим результатом в пилотируемой космонавтики [2].
Основным недостатком такого способа управления является то, что его реализация возможна лишь при последовательном запуске ПКО и АКО на орбиту с фиксированным наклонением за определенное время для обеспечения необходимого начального фазового угла между объектами с большой точностью ±0.5°. В случае же со сближением и стыковкой с МКС или другим ПКО, уже находящемся на орбите, обеспечение необходимого начального фазового угла потребует от ПКО проведения многочисленных последовательных коррекций перед стартом АКО для формирования орбиты стыковки с необходимой точностью. Учитывая интенсивный график полетов к МКС космических кораблей, обеспечивающих транспортные операции, такое предстартовое формирование орбиты МКС потребует дополнительно большого количества топлива на проведение маневров. Резервная дата старта АКО при формировании фазового диапазона ±0.5° практически нереализуема. В случае же проведения миссии корабля-спасателя, подготовка условий для быстрого сближения потребует слишком много времени, несопоставимого со временем полета к ПКО [3].
Техническим результатом изобретения является сокращение продолжительности сближения до трех витков с ПКО, находящемся на орбите длительное время с расширением значения фазового диапазона до 20°, позволяющем обеспечить дату старта АКО без проведения дополнительных коррекций на ПКО.
Технический результат достигается благодаря тому, что в способе управления движением активного космического объекта, стыкуемого с пассивным космическим объектом, включающем выведение активного космического объекта на опорную орбиту, определение характеристик импульсов сближения и последующее приложение импульсов сближения к активному космическому объекту, в отличие от известного, предварительно производят определение характеристик l импульсов сближения по номинальным параметрам опорной орбиты выведения, где l=1, 2, …, которые прикладывают на первом витке после выведения, затем, определяют характеристики m импульсов сближения по фактическим параметрам орбиты активного космического объекта, где m=1, 2, …, которые прикладывают на последующих витках сближения.
Технический результат в предлагаемом способе управления достигается за счет того, что переход на фазирующую орбиту начинается практически сразу после выведения на опорную орбиту с использованием l импульсов сближения, характеристики которых предварительно определены в соответствии с номинальными параметрами опорной орбиты выведения АКО. В этом случае не требуется времени на ожидание определения фактических параметров опорной орбиты выведения АКО.
Сущность изобретения поясняется фиг.1-3 и табл.1, где на фиг.1 показана схема сближения АКО «Союз-ТМА» с МКС,
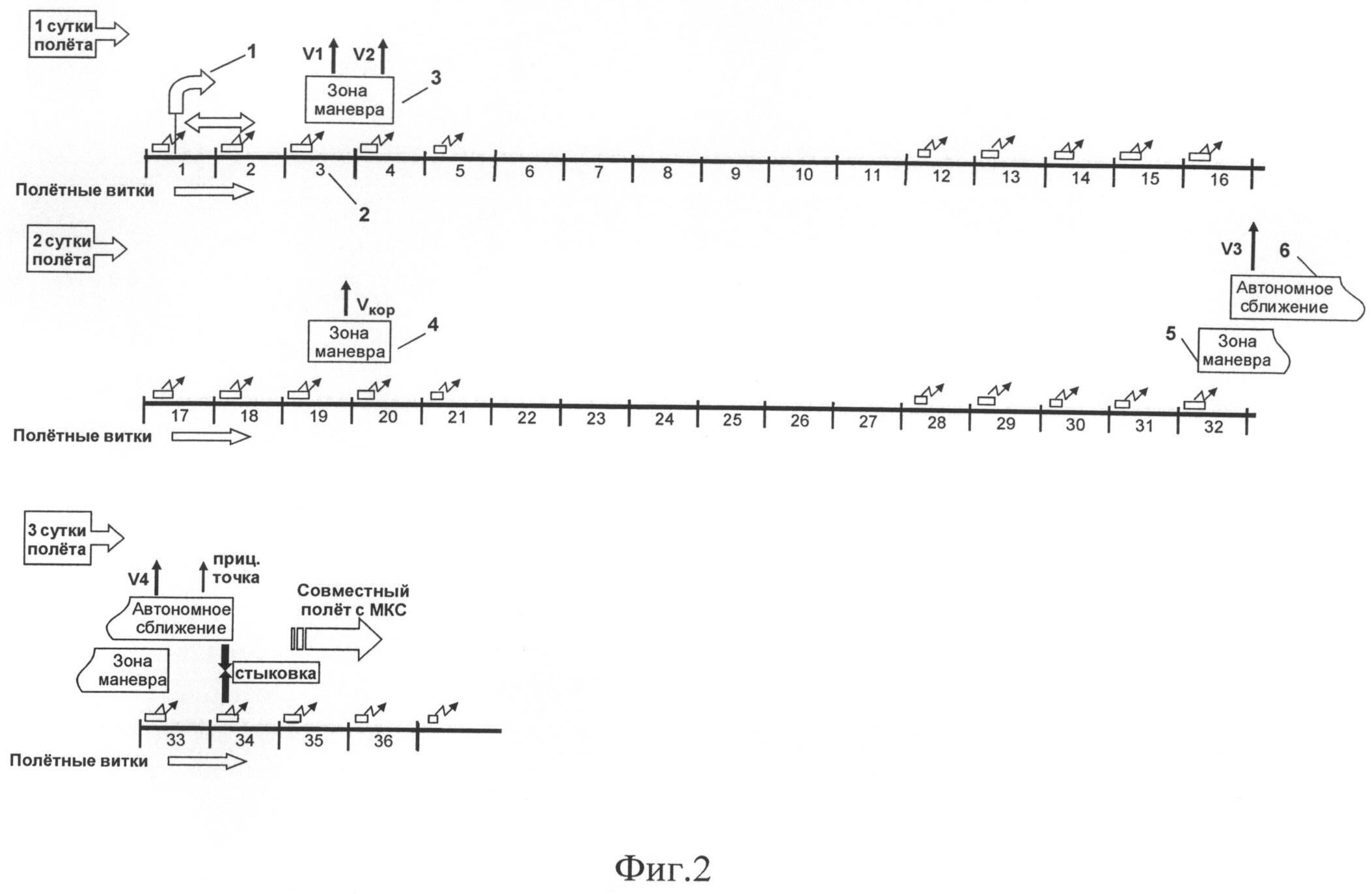
на фиг.2 приведена циклограмма проведения основных технологических операций при сближении АКО «Союз-ТМА» с МКС при существующей двухсуточной схеме сближения,
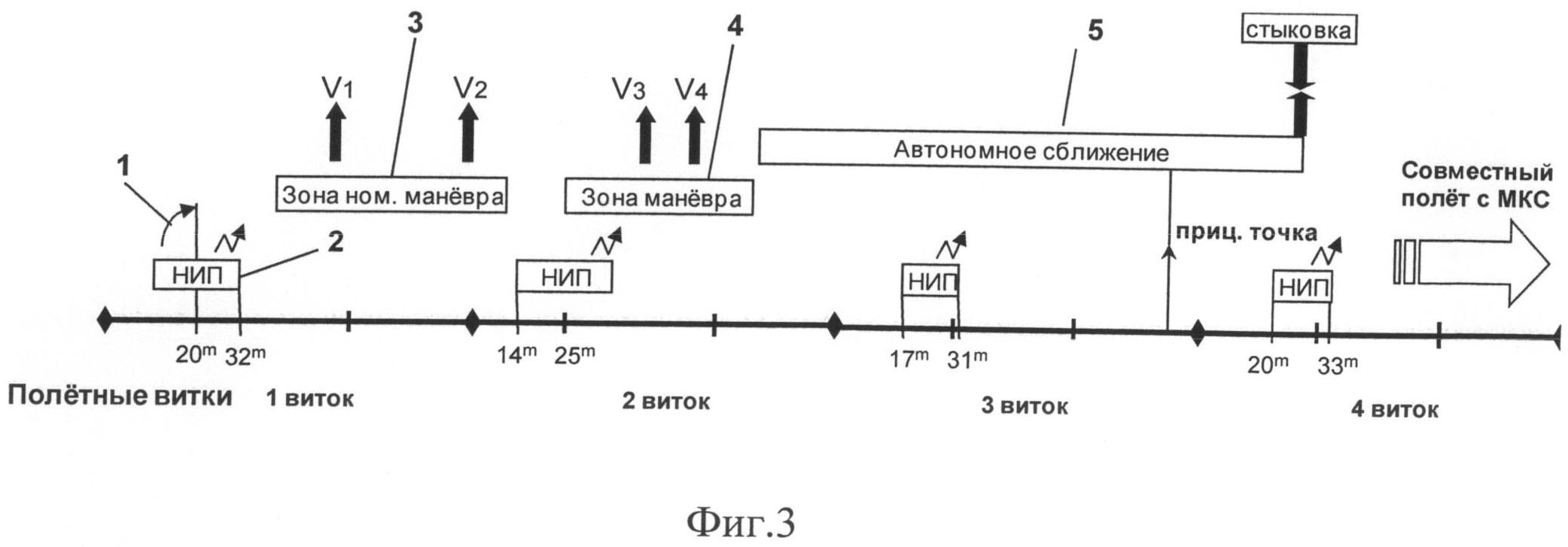
на фиг.3 приведена циклограмма проведения основных технологических операций при реализации предлагаемого способа в трехвитковой схеме сближения,
в табл.1 представлены результаты расчетов по точностям, определяемым отклонениями от прицельного вектора состояния в прицельной точке сближения и расходу топлива, выраженному в характеристической скорости (в м/сек) при использовании предлагаемого способа в трехвитковой схеме сближения в сравнении с существующей двухсуточной схемой сближения.
На фиг.1 показана известная схема выведения, например АКО «Союз-ТМА» на целевую орбиту, совпадающую с плоскостью орбиты ПКО на примере МКС. После выведения начальный фазовый угол Ф между АКО и ПКО ликвидируется за счет перехода АКО на орбиту фазирования (поз.1) с помощью двухимпульсного маневра (V1 и V2) и последующего полета на этой орбите вплоть до начала автономного участка, обеспечивающего переход в окрестность МКС также за счет проведения двухимпульсного маневра (V3 и V4).
На фиг.2 в качестве примера представлена циклограмма проведения основных технологических операций при реализации двухсуточной схемы сближения АКО «Союз-ТМА» с МКС. Как видно из этого рисунка сразу после выведения (поз.1), проводится определение орбиты на двух витках, после чего в зоне видимости третьего витка (поз.2) вводятся данные на первый двухимпульсный маневр (V1 и V2) сближения (поз.3), обеспечивающий переход АКО на орбиту фазирования. Далее через сутки эта технологическая цепочка, состоящая из определения орбиты АКО, закладки данных на маневр и исполнение маневра, повторяется с выдачей корректирующего импульса Vкор (поз.4). Цель импульса Vкор - ликвидировать ошибки в прогнозе вектора состояния АКО, накопившиеся за первые сутки полета. Еще через сутки эта технологическая цепочка вновь повторяется с выполнением второго двухимпульсного маневра (V3 и V4) (поз.5) после чего АКО «Союз-ТМА оказывается в окрестности МКС и начинается автономный участок полета (поз.6).
На фиг.3 представлена циклограмма предлагаемого способа в трехвитковой схеме сближения. В отличие от двухсуточной схемы переход на орбиту фазирования происходит сразу после выведения (поз.1) и последующего окончания зоны НИПов на 1-ом витке (поз.2). При этом используется два импульса (l=1, 2) для перехода на фазирующую орбиту (V1 и V2) (поз.3). Данные по времени проведения и характеристикам импульсов маневра для перехода на фазирующую орбиту рассчитываются по вектору состояния ПКО и номинальному вектору выведения АКО и заносятся в полетное задание АКО непосредственно перед запуском РН с АКО или передаются в БВК АКО сразу после выведения на опорную орбиту. Место расположения первых двух импульсов находится между зонами НИПов первого и второго суточных витков. Это позволяет с одной стороны определить истинные параметры выведения АКО на опорную орбиту без возмущающих импульсов, а с другой стороны обеспечить передачу в БВК АКО текущего вектора состояния и характеристики двух корректирующих импульсов m=1, 2 (V3 и V4) (поз.4). Необходимость введения в схему сближения и последующего выполнения двух корректирующих импульсов m=1, 2 (V3 и V4) образуется вследствие отличия реальной опорной орбиты выведения АКО и номинальной опорной орбиты выведения, что приводит к появлению шестимерного вектора промаха в прицельной точке сближения. Так как каждый импульс корректирующего маневра имеет три составляющие, то два импульса позволяют полностью ликвидировать все шесть параметров вектора промаха. Зона проведения двух корректирующих импульсов располагается между концом зоны видимости НИПов на втором суточном витке и началом автономного участка сближения и должна составлять не менее полвитка. Длительность зоны не менее полвитка обосновывается тем, что необходимо ликвидировать боковое рассогласование между реальной орбитой АКО и орбитой ПКО. Так как оптимальной точкой для этой операции является одна из двух точек пересечения обоих орбит (АКО и ПКО) [4], длительность зоны для выполнения импульсов в полвитка полностью гарантирует нахождение в нем этой точки. Корректирующие импульсы m=1, 2 (V3 и V4) рассчитываются по фактическому вектору выведения АКО, полученному по измерениям орбиты в зоне видимости НИПов на первом суточном витке с учетом номинального исполнения первых двух фазирующих импульсов l=1, 2 (V1 и V2). По окончанию выполнения корректирующих импульсов m=1, 2 (V3 и V4) АКО оказывается в окрестности МКС и начинается автономный участок (поз.5) аналогичный представленному на фиг.2, с выполнением оставшихся импульсов m=3,4,5…
Расчеты импульсов проводятся с использованием уравнения коррекции [5], в относительном движении с центром в ПКО
где  - конечный вектор, после решения задачи сближения,
- конечный вектор, после решения задачи сближения,
 - вектор состояния в начале сближения,
- вектор состояния в начале сближения,
Mk0 - матрица прогноза в относительном движении от момента начала сближения t0 до момента конца сближения tk,
Aki - матрица коррекции в относительном движении для i-го импульса ΔVi.
Вектор состояния в конечной точке должен соответствовать прицельному вектору состояния:  ,
,
В задаче сближения двух космических объектов, как правило, используется задача встречи, когда  .
.
В случае если конечный вектор не соответствует выбранному прицельному вектору, образуется вектор промаха  .
.
Для определения импульсов сближения используется интервал маневрирования. Каждому сочетанию точек приложения импульсов сближения соответствует определенная комбинация импульсов. ΔV1, …, ΔVn. Фактическое значение импульсов сближения и точек их приложения определяется из многообразия решений уравнения коррекции, путем вычисления и минимизации функционала F

Данные по корректирующему маневру закладываются в БВК АКО в зоне видимости НИПов на втором витке. В принципе параметры корректирующего маневра могут быть рассчитаны автономно БВК АКО по фактическому вектору состояния АКО.
После выполнения корректирующего двухимпульсного маневра наступает этап автономного участка, располагающийся примерно за виток до прицельной точки встречи. Автономный участок проводится с использованием системы взаимных измерений АКО и ПКО, работающей с ограниченной дальности и обеспечивающий относительный вектор состояния. По завершению автономного участка проводится стыковка АКО и ПКО в зоне видимости четвертого витка. Из циклограммы, представленной на фиг.3, видно, что длительность полета от выведения до стыковки в предлагаемом способе составит три витка или около 4.5 часов.
Предлагаемый способ управления может быть использован при проведении сближения и стыковки АКО с орбитальной станцией МКС или любым другим ПКО. Особенно полезно использование этого метода при проведении спасательной миссии, когда фактор времени доставки экипажа на борт МКС становится решающим.
В табл.1 представлены результаты, полученные с помощью статистического моделирования 300 реализации процесса сближения: математическое ожидание (m) и среднеквадратическое отклонение (σ) прицельного вектора состояния в прицельной точке сближения в относительной орбитальной системы координат rnb [5], а также расход топлива, выраженный в характеристической скорости (в м/сек). Дополнительно в отдельной строке представлен предельный (m+3σ) расход топлива. Рассматривались предлагаемый способ при выполнении трехвиткового сближения и, для сравнения, реализация стандартной двухсуточной схемы сближения.
При получении данных табл.1 предполагалось, что АКО выводится на целевую орбиту с параметрами Нmin/Нmах=200/240 км и наклонением i=51.6°. Моделировался начальный разброс по вектору выведения, соответствующий разбросу по периоду ±22S, и по боку ±3.5 угл. мин., что соответствует разбросу параметров опорной орбиты при выведении определенным ракетоносителем, используемым при выведении АКО [6]. Орбита МКС соответствует плановой высоте на 2012 год - 408 км. Начальные фазовые углы для предлагаемой трехвитковой схемы (17) и для стандартной двухсуточной схемы (215°) соответствовали оптимальным значениям для каждой схемы. Расчеты проведены с помощью программного обеспечения расчета задачи сближения для АКО с орбитальной станцией МКС.
Как видно из табл.1, σ боковых составляющих вектора состояния в прицельной точке (b, Vb): 0.22 км и 0.27 км по b и 0.39 м/сек и 0.31 м/сек по Vb, в обеих схемах сближения очень близки. Также практически одинаковы предельные расходы топлива на сближение 114.9 м/сек и 113.2 м/сек. Но, в предполагаемом способе по сравнению с двухсуточной схемой, σ вектора состояния в прицельной точке в плоскости орбиты (r, n, Vr, Vn) значительно меньше. Так, если по составляющей r в обеих схемах σ примерно равны (0.24 км и 0.25 км), то по составляющей n σ меньше в полтора раза (0.83 км и 1.24 км), по составляющей Vn σ меньше в два раза (0.27 м/сек и 0.55 м/сек), а по составляющей Vr σ меньше более чем в три раза (0.18 м/сек и 0.63 м/сек). Данный эффект реализуется за счет значительно меньшего участка полета перед выдачей параметров вектора состояния в БВК АКО перед началом автономного участка и следовательно гораздо меньшему влиянию возмущающих факторов (неточностей отработки импульсов, динамических операций, влияние атмосферы и т.д.). Это, в свою очередь, обеспечивает более точные кинематические условия перед началом работы алгоритма автономного участка сближения и способствует его надежной работе. Все вышесказанное подтверждает возможность использования данного способа в задаче сближения двух космических объектов.
Также следует отметить, что диапазон начальных фазовых углов в трехвитковой схеме с предложенным способом управления, определенный при моделировании задачи сближения составляет около 20°. В случае ожидания фактических параметров АКО после определения орбиты по данным радиоконтроля орбиты с НИПов, как это реализовано в стандартной двухсуточной схеме сближения, переход на фазирующую орбиту выполнился бы на виток позже, что соответственно сузило бы в трехвитковой схеме сближения возможный диапазон начальных фазовых углов до 5°
|
Список литературы
1. Wigbert Fehse (2003) "Automated Rendezvous and Docking of Spacecraft", Cambrige University press
2. NASA Press kit (1966) "Project Gemini-11" - прототип, http://www.scribd.com/doc/11483557/Gemini-11-Press-Kit
3. R. Murtazin, S. Budylov "Short Rendezvous Missions for Advanced Russian Human Spacecraft", Acta Astronautica 67(2010) 900-909
4. Эльясберг П.Е. «Введение в теорию полета искусственных спутников Земли», Москва, Наука, 1965
5. Р.Ф. Аппазов, О.Г. Сытин «Методы проектирования траекторий носителей и спутников Земли», Москва, Наука, 1987
6. Steven J. Isakowitz (2004) "International Reference Guide to Space Launch Systems" Forth edition
Способ управления движением активного космического объекта, стыкуемого с пассивным космическим объектом, включающий выведение активного космического объекта на опорную орбиту, определение характеристик импульсов сближения и последующее приложение импульсов сближения к активному космическому объекту, отличающийся тем, что предварительно производят определение характеристик l импульсов сближения по номинальным параметрам опорной орбиты выведения, где l=1, 2, …, которые прикладывают на первом витке после выведения, затем определяют характеристики m импульсов сближения по фактическим параметрам орбиты активного космического объекта, где m=1, 2, …, которые прикладывают на последующих витках сближения.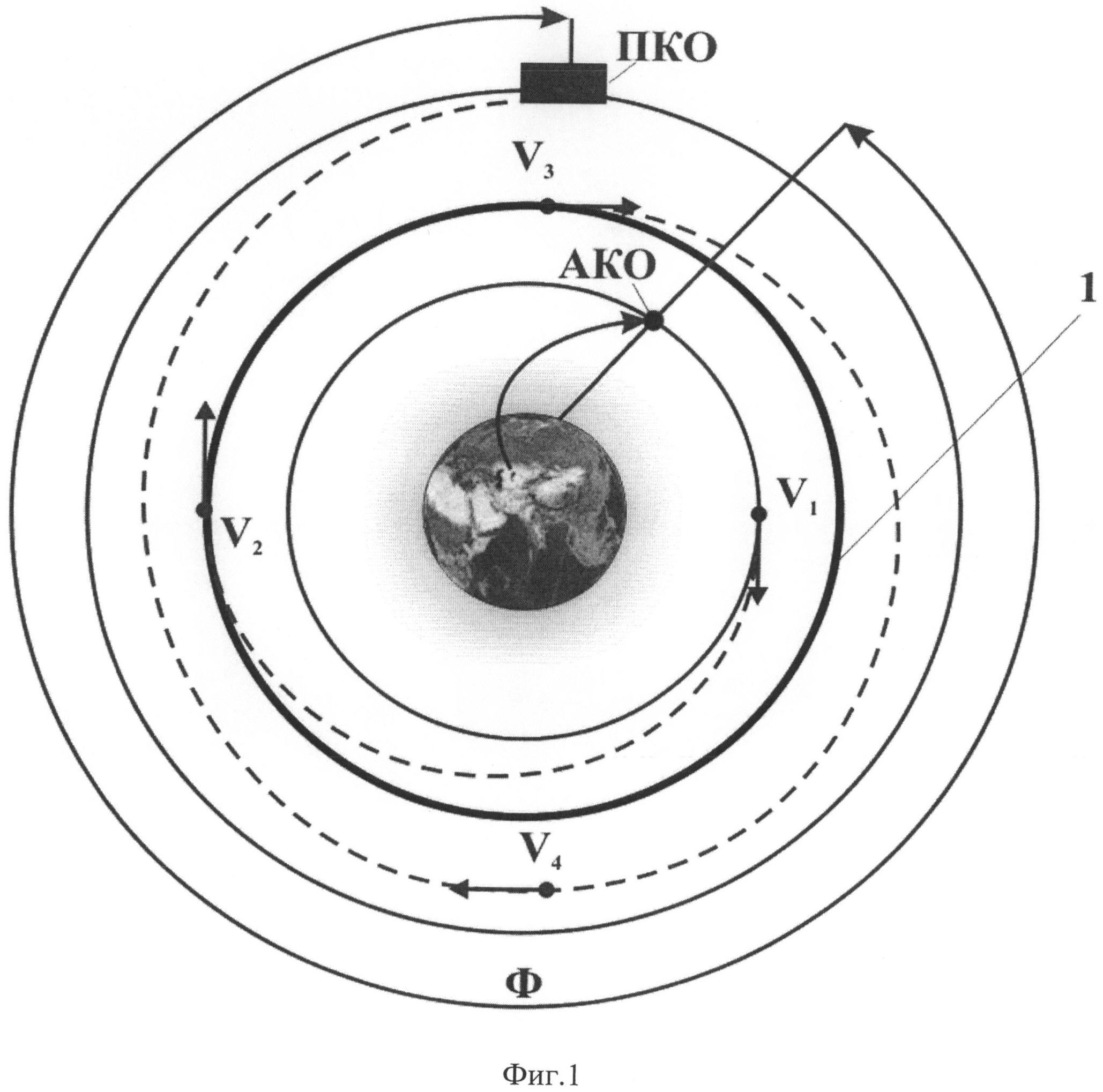
Быстроразъемный агрегат
Устройство фиксации на цилиндрической поверхности
Способ установки уплотнительных элементов между корпусом и валом
Способ заправки рабочим телом радиатора системы терморегулирования космического объекта
Устройство для разделения элементов конструкции
Способ управления движением центра масс космического корабля при причаливании
Электрохимический генератор на основе водородно-кислородных топливных элементов и способ удаления воды и тепла из зоны реакции батареи топливных элементов
Устройство контроля ориентации пассивных космических аппаратов
Система запуска криогенного жидкостного ракетного двигателя космического объекта
Способ качественной оценки биокоррозионных поражений тонкостенных герметичных оболочек из алюминиево-магниевых сплавов при эксплуатации космических аппаратов и суспензия споровых материалов для его реализации
Космическая головная часть
Быстроразъемный агрегат
Устройство фиксации на цилиндрической поверхности
Способ установки уплотнительных элементов между корпусом и валом
Способ заправки рабочим телом радиатора системы терморегулирования космического объекта
Устройство для разделения элементов конструкции
Способ управления движением центра масс космического корабля при причаливании
Планшет для выбора объектов наблюдения с орбитального космического аппарата
Электрохимический генератор на основе водородно-кислородных топливных элементов и способ удаления воды и тепла из зоны реакции батареи топливных элементов
Ракетно-космическая система

