Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО КОРАБЛЯ ПРИ ПРИЧАЛИВАНИИ
Вид РИД
Изобретение
Изобретение относится к космической технике и может быть использовано для управления движением центра масс космического корабля (КК) при причаливании в плоскости, перпендикулярной линии визирования.
Известен способ управления движением вокруг центра масс (патент №2412872 от 05.11.2009), в котором при угле и угловой скорости вокруг центра масс, меньших порогов срабатывания, вводится определение угла дрейфа, вычисляемого интегрированием угловой скорости АК вокруг центра масс на выбранном временном интервале. По величине угла дрейфа, отнесенного к временному интервалу - по средней скорости на интервале, принимается решение о приложении управляющего воздействия для регулирования угловой скорости вокруг центра масс при ее значениях, меньших зоны нечувствительности. Этот способ управления обеспечивает достижение угловых скоростей вокруг центра масс, в 3-5 раз меньших величины порога срабатывания. Фактически ограничение определяется чувствительностью датчика угловых скоростей и эффективностью исполнительных органов.
Известен способ управления причаливанием (патент 2225812 от 30.05.2002), в котором управление движением центра масс в плоскости, перпендикулярной линии визирования, осуществляется по углам рассогласования АК относительно линии визирования и угловой скорости линии визирования, определяемой через углы рассогласования АК относительно линии визирования и угловые скорости АК вокруг центра масс. Приложение управляющих воздействий производится при превышении угла рассогласования или угловой скорости линии визирования своих порогов срабатывания.
Одна из проблем при управлении движением центра масс КК при причаливании в плоскости, перпендикулярной линии визирования, связана с качеством измерения углов рассогласования КК относительно линии визирования. В настоящее время углы рассогласования активного корабля (АК) относительно линии визирования измеряются или радиотехнической аппаратурой, или по анализу телевизионного изображения или пассивного корабля (ПК), или специально установленной стыковочной мишени на ПК. Необходимая для управления угловая скорость линии визирования вычисляется через дифференцирование углов рассогласования АК и измерения угловой скорости АК вокруг центра масс. Из изложенного ясно, что все аппаратные ошибки, и прежде всего флюктуационные, будут влиять на точность получения угловой скорости линии визирования. И чем меньше величина угловой скорости линии визирования, тем большее влияние флюктуационной составляющей ошибки. Для снижения влияния флюктуационной составляющей ошибки при измерении углов рассогласования и вычислении угловой скорости линии визирования вводится фильтрация.
Наличие фильтра, который в современных радиотехнических средствах выполняется в виде апериодического звена с постоянной времени ≈1 секунда, и необходимость введения не меньшего запаздывания при дифференцировании углов рассогласования, приводят к динамической ошибке, которая осложняет процесс регулирования угловой скорости линии визирования. Влияние динамической и флюктуационной ошибок особенно сказывается при значениях угловой скорости линии визирования, близких к нулю, когда их наличие может существенно исказить значение угловой скорости линии визирования. Регулировать угловую скорость линии визирования вблизи нулевого значения по текущим значениям, получаемым при ее определении, практически невозможно, так как это неизбежно приведет к перерегулированию.
Принимая во внимание, что информация об угловой скорости линии визирования исходно зашумлена, а потому имеет большую постоянную времени - более 1 секунды, то регулирование угловой скорости предпочтительнее осуществлять импульсами, длительность которых подбирается эмпирически. При величине угла рассогласования, большем порога срабатывания, подбор длительности импульсов направлен на то, чтобы после смены знака угловой скорости линии визирования ее величина принимала бы минимально достижимое значение. Обеспечить это при большой постоянной времени одним включением практически невозможно, а потому выдается серия импульсов с паузами между ними за время между которыми производится оценка угловой скорости линии визирования.
После уменьшения угла рассогласования до величины, меньшей порога срабатывания, центр масс АК будет дрейфовать до значения порога срабатывания по углу противоположного знака с угловой скоростью линии визирования, полученной в результате регулирования, пока угол был больше порога срабатывания. Если при этом окажется, что угловая скорость линии визирования меньше ее порога срабатывания, то регулирование угловой скорости линии визирования внутри зоны нечувствительности по углу производиться не будет.
При достижении углом рассогласования порога срабатывания возобновится регулирование угловой скорости линии визирования. Но при этом, в силу выбранного метода, за время регулирования угловой скорости линии визирования угол рассогласования будет увеличиваться, причем величина превышения углом рассогласования порогового значения зависит от величины угловой скорости, которая была в момент достижения порога срабатывания по углу. Повышение эффективности регулирования угловой скорости линии визирования за счет увеличения длительности включения исполнительных органов нецелесообразно, так как это приведет к повышению расхода рабочего тела и к перерегулированию угловой скорости линии визирования.
Техническим результатом предлагаемого решения является повышение точности регулирования угловой скорости линии визирования при угле рассогласования и угловой скорости линии визирования, меньших заданных порогов срабатывания.
Технический результат достигается тем, что в способ управления движением центра масс космического аппарата при причаливании, включающий измерение угла рассогласования относительно линии визирования с запаздыванием и измерение угловой скорости линии визирования с запаздыванием, приложение управляющего воздействия по центру масс при превышении углом рассогласования заданного порога срабатывания, длительность которого пропорциональна модулю угла рассогласования и модулю угловой скорости линии визирования с учетом дальности, а знак противоположен знаку угла, а также приложение управляющего воздействия при угле рассогласования, меньшем заданного порога срабатывания, а угловой скорости линии визирования, большей заданного порога срабатывания, длительность которого пропорциональна модулю угловой скорости линии визирования с учетом дальности, а знак противоположен знаку угловой скорости линии визирования, в отличие от прототипа, введено определение средней скорости по величине угла дрейфа, определяемого по угловой скорости линии визирования на интервале времени, определяемого как сумма значений запаздываний при определении угла рассогласования и угловой скорости линии визирования, отнесенного к длительности временного интервала, по окончании временного интервала, в случае, когда средняя угловая скорость равна или больше половины порога срабатывания по угловой скорости линии визирования, производят приложение управляющего воздействия по центру масс, длительность которого задается пропорционально модулю средней скорости с учетом дальности, а знак противоположен знаку средней угловой скорости, затем обнуляют накопленные значения угла дрейфа и временного интервала, и вновь начинают определение угла дрейфа и средней скорости.
Для фактической оценки угловой скорости линии визирования при ее значениях, меньших порога срабатывания, и вводится интегральная оценка средней скорости через угол дрейфа, который получается интегрированием угловой скорости линии визирования на заданном временном интервале. Длительность временного интервала должна быть не менее запаздывания при получении угловой скорости линии визирования. При достаточно большой длительности временного интервала отфильтровываются высокочастотные флюктуационные составляющие ошибки при измерении угла рассогласования и вычислении угловой скорости линии визирования. По отношению угла дрейфа к длительности временного интервала определяется средняя скорость, которая, фактически, будет средней угловой скоростью линии визирования на этом временном отрезке. Поскольку речь идет о значениях угловой скорости линии визирования, близких к нулю, то использовать эти значения, получаемые по угломерным измерениям, для регулирования нельзя.
С учетом предлагаемого технического решения было проведено моделирование резервного автоматического причаливания (РАП) пилотируемого корабля «Союз ТМА».
Пороги срабатывания РАП для корабля «Союз ТМА»:
- по углу рассогласования вокруг центра масс ±0.2 градуса,
- по угловой скорости вокруг центра масс ±0.05 град/с,
- по углу рассогласования относительно линии визирования ±0.2 град,
- по угловой скорости линии визирования ±0.04 град/с.
При этом следует отметить, что каждое включение исполнительных органов вокруг центра масс, вследствие конструктивных особенностей корабля «Союз ТМА», возмущает движение центра масс.
Переходной процесс причаливания с дальности 29 м (550 с) до 9.8 м (790 с) приведен на фиг.1.
Параметры движения на фиг.1:
ugz[1] - угол рассогласования относительно линии визирования;
ugsz[1] - угловая скорость линии визирования;
omkd[1] - угловая скорость вокруг центра масс;
tdl[1] - длительность приложения управляющего воздействия по центру масс;
tok[1] - длительность приложения управляющего воздействия вокруг центра масс;
Т[с] - время полета.
Из рассмотрения переходного процесса следует, что при изменении угловой скорости линии визирования (параметр ugsz[1]) вблизи нулевого значения под влиянием флютуационных ошибок изменяется и ее знак, а потому использовать текущие значения угловой скорости линии визирования нельзя. Введение определения угла дрейфа интегрированием угловой скорости линии визирования на временном интервале, равном сумме запаздывания, позволяет оценить среднюю угловую скорость линии визирования на выбранном временно интервале. По результату оценки принять решение о приложении управляющего воздействия.
Приложение управляющих импульсов по средней скорости в соответствии с предлагаемым техническим решением введено с дальности 25 м, поскольку именно на близких расстояниях в большей степени сказывается влияние динамического запаздывания в сигнале угловой скорости линии визирования. Причем определение средней угловой скорости введено только при разных знаках угла рассогласования и угловой скорости линии визирования.
На корабле «Союз ТМА» измерения углов рассогласования производятся с постоянной времени 1 секунда. С постоянной времени 1 секунда осуществляется и дифференцирование угла рассогласования для определения угловой скорости линии визирования, а потому длительность временного интервала при моделировании составляла 2 секунды.
Из рассмотрения графиков следует:
на дальности 25 м (600 с) из-за превышения углом рассогласования ugz[1] порога срабатывания было произведено три включения ДПО по центру масс tdl[1] длительностью 50 мс каждое. В результате угловая скорость линии визирования ugsz[1] изменила знак и угол ugz[1] начал уменьшаться.
Через 20 секунд, когда угол рассогласования изменил знак, началась оценка средней скорости, и в результате был выдан 1 импульс по центру масс длительностью tdl[1]=50 мс. После чего угловая скорость линии визирования уменьшилась, о чем свидетельствует изменение наклона угла рассогласования ugz[1]. Изменению наклона способствовали и два импульса вокруг центра масс длительностью по tok[1]=50 мс каждое, которые прошли в этом же промежутки времени.
Примерно на 658 секунде, когда угол рассогласования ugz[1] достиг порога срабатывания противоположного знака, было выдано 2 импульса по центру масс длительностью (tdl[1]) по 50 мс каждое, после чего угловая скорость линии визирования изменила знак и угол начал уменьшаться.
Примерно на 700 секунде, когда угол рассогласования и угловая скорость линии визирования стали разного знака, произведена оценка средней скорости и выдан 1 импульс по центру масс tdl[1], длительностью 50 мс. После этого уменьшился наклон изменения угла рассогласования.
Примерно на 742 секунде прошел импульс вокруг центра масс tok[1], длительностью 35 мс, что увеличило значение угловой скорости линии визирования. А на 752 секунде по оценке средней скорости был выдан 1 импульс по центру масс tdl[1], длительностью 40 мс, после чего резко уменьшился наклон изменения угла. Этому способствовал и импульс вокруг центра масс tok[1], длительностью 40 мс, который прошел 4-мя секундами позже.
Примерно на 780 секунде прошел импульс вокруг центра масс tok[1], длительностью 35 мс, который возмутил движение центра масс, что и привело к увеличению наклона изменения угла и на 788 секунде, когда угол достиг порога срабатывания, был выдан импульс по центру масс tdl[1], длительностью 0.075 мс.
Из рассмотрения приведенных графиков видно, что уменьшение угловой скорости линии визирования по предложенной технологии уменьшает среднее значение угловой скорости линии визирования, что приводит к увеличению времени дрейфа центра масс корабля между порогами срабатывания по углу рассогласования. Так на первом участке (600-670) секунды выдача импульса увеличила время достижения углом рассогласования порогового значения, примерно, на 30 секунд, а на втором - (670-790) секунды, примерно, на 70 секунд. Увеличение длительности между включениями уменьшает общий расход рабочего тела и, что более важно, уменьшает относительные скорости, что положительно влияет на параметры движения в момент касания. Разница в изменении характеристик РАП на этих участках объясняется увеличением эффективности исполнительных органов при выдаче импульсов по центру масс по мере уменьшения дальности. На первом участке дальность изменилась с 25 м до 19 м, а на втором с 19 м до 9.8 м.
Способ управления движением центра масс космического аппарата при причаливании, включающий измерение угла рассогласования относительно линии визирования с запаздыванием и измерение угловой скорости линии визирования с запаздыванием, приложение управляющего воздействия по центру масс при превышении углом рассогласования заданного порога срабатывания, длительность которого пропорциональна модулю угла рассогласования и модулю угловой скорости линии визирования с учетом дальности, а знак противоположен знаку угла, а также приложение управляющего воздействия при угле рассогласования меньшем заданного порога срабатывания, а угловой скорости линии визирования, большей заданного порога срабатывания, длительность которого пропорциональна модулю угловой скорости линии визирования с учетом дальности, а знак противоположен знаку угловой скорости линии визирования, отличающийся тем, что для повышения точности регулирования угловой скорости линии визирования при угле рассогласования и угловой скорости линии визирования, меньших заданных порогов срабатывания, определяют среднюю скорость по величине угла дрейфа, определяемого по угловой скорости линии визирования на интервале времени, определяемого как сумма значений запаздываний при определении угла рассогласования и угловой скорости линии визирования, отнесенного к длительности временного интервала, по окончании временного интервала, в случае, когда средняя угловая скорость равна или больше половины порога срабатывания по угловой скорости линии визирования, производят приложение управляющего воздействия по центру масс, длительность которого задается пропорционально модулю, средней скорости с учетом дальности, а знак противоположен знаку средней угловой скорости, затем обнуляют накопленные значения угла дрейфа и временного интервала, и вновь начинают определение угла дрейфа и средней скорости.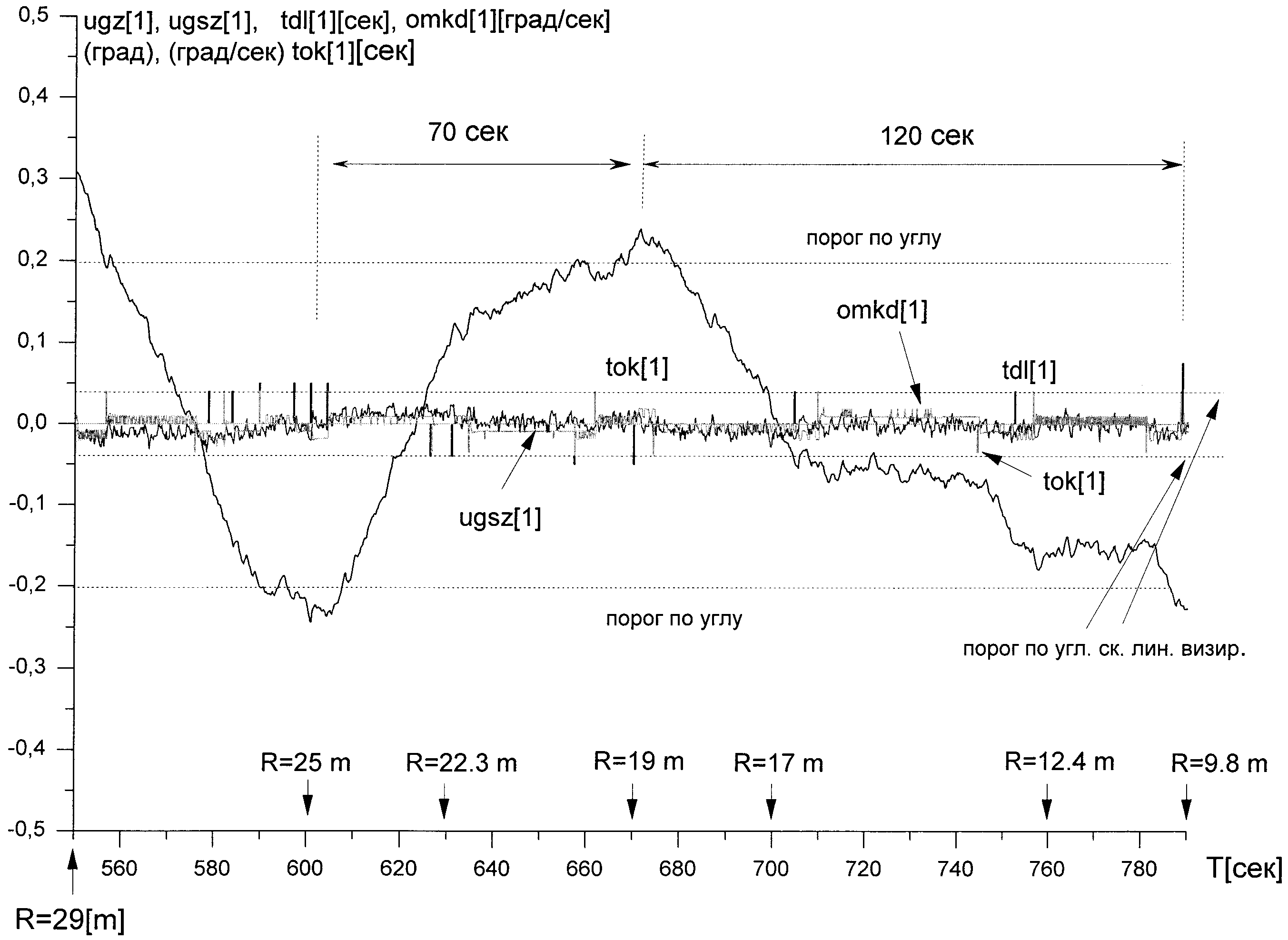
Двигательная установка ракетного блока
Вихревой электронасосный агрегат
Способ обнаружения пассивного космического объекта при сближении с ним активного космического аппарата
Щелевая антенна
Способ увода разгонного ракетного блока с траектории полета космического аппарата
Термокомпрессионное устройство
Космическая система для производства материалов в космосе
Способ увода разгонного ракетного блока с траектории полета космического аппарата
Космическая головная часть и способ ее сборки
Космическая головная часть
Двигательная установка ракетного блока
Вихревой электронасосный агрегат
Способ обнаружения пассивного космического объекта при сближении с ним активного космического аппарата
Щелевая антенна
Способ увода разгонного ракетного блока с траектории полета космического аппарата
Термокомпрессионное устройство
Космическая система для производства материалов в космосе
Способ увода разгонного ракетного блока с траектории полета космического аппарата
Космическая головная часть
Космическая головная часть и способ ее сборки

