Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ЗАРЯДКОЙ БАТАРЕИ И СПОСОБ УПРАВЛЕНИЯ ЗАРЯДКОЙ БАТАРЕИ ДЛЯ ЭЛЕКТРОМОБИЛЯ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится устройству и способу для управления зарядкой батареи, установленной в электромобиле.
Предшествующий уровень техники
В документе JP3417389B, опубликованном Патентным ведомством Японии в 2003 году, раскрыто устройство для управления устройством генерирования электроэнергии, установленном в гибридном электромобиле для управления зарядкой батареи.
В этом способе управления зарядкой батареи используется дорожная информация, такая как маршрут перемещения, расстояние перемещения и высота над уровнем моря, полученная от автомобильной навигационной системы. Верхнее предельное значение для управления энергией батареи и нижнее предельное значение для управления энергией батареи устанавливают таким образом, чтобы перед движением по спуску вниз остаточная энергия батареи была минимально возможной, а перед движением вверх остаточная энергия батареи была максимально возможной.
Краткое изложение существа изобретения
Однако в зависимости от условий эксплуатации транспортного средства нижнее предельное значение для управления энергией батареи может оказаться больше верхнего предельного значения. В этом случае невозможно реализовать управление зарядкой батареи.
Задачей настоящего изобретения является обеспечение управления зарядкой батареи, так чтобы соотношение между верхним предельным значением для управления энергией батареи и нижним предельным значением для управления энергией батареи не изменилось на обратное.
Для решения указанной задачи, устройство, которое управляет устройством генерирования электроэнергии, установленным в электромобиле, чтобы управлять зарядкой батареи, согласно настоящему изобретению содержит: блок детектирования текущего местоположения, который детектирует текущее местоположение ведущего транспортного средства; блок установки области управления, который устанавливает область для управления энергией батареи, используя текущее местоположение в качестве опорного; блок детектирования дорожной информации, который детектирует по меньшей мере один проезжаемый маршрут в области для управления энергией батареи; блок оценки энергии, необходимой для перемещения, который оценивает значения энергии, необходимые для перемещения в соответствующие точки на проезжаемом маршруте, исходя из текущего местоположения на основе информации, относящейся к текущему местоположению, и информации, относящейся к соответствующим точкам; блок выделения максимума/минимума, который выделяет максимальное значение и минимальное значение из необходимых значений энергии для перемещения; блок вычисления целевых значений для управления, который вычисляет верхнее предельное значение для управления энергией батареи и нижнее предельное значение для управления энергией батареи на основе максимального значения и минимального значения энергии, необходимой для перемещения; блок вычисления интервала для управления энергией батареи, который вычисляет интервал для управления энергией батареи путем вычитания нижнего предельного значения для управления энергией батареи из верхнего предельного значения для управления энергией батареи; блок изменения области управления, который изменяет область для управления энергией батареи, когда интервал управления энергией батареи не входит в заранее определенный диапазон, так чтобы интервал управления энергией батареи вошел в заранее определенный диапазон; и блок управления зарядкой, который управляет устройством генерирования электроэнергии, установленном на автомобиле, так чтобы остаточная энергия батареи находилась в интервале для управления батареей между верхним предельным значением для управления энергией батареи и нижним предельным значением для управления энергией батареи.
Подробности, а также другие признаки и преимущества настоящего изобретения изложены далее в остальной части описания и показаны на сопроводительных чертежах.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг. 1 изображает схему системы, показывающую силовую установку и систему управления гибридного электромобиля, к которым применим вариант настоящего изобретения;
Фиг. 2 изображает блок-схему, показывающую основную процедуру, выполняемую главным контроллером;
Фиг. 3 изображает блок-схему процедуры управления зарядкой с использованием энергии, вырабатываемой с помощью двигателя, которая выполняется главным контроллером;
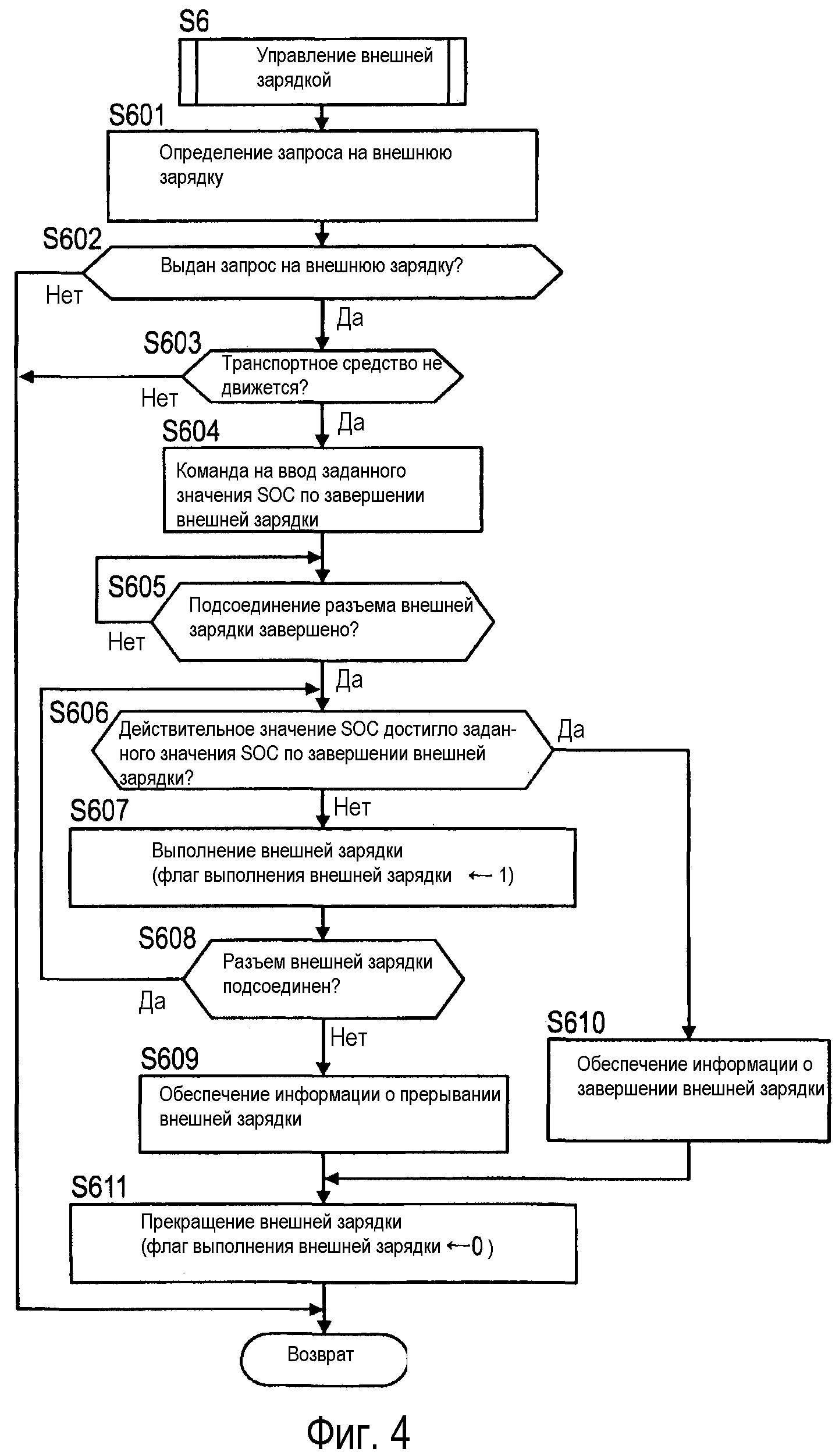
Фиг. 4 изображает блок-схему, показывающую процедуру управления внешней зарядкой, выполняемую главным контроллером;
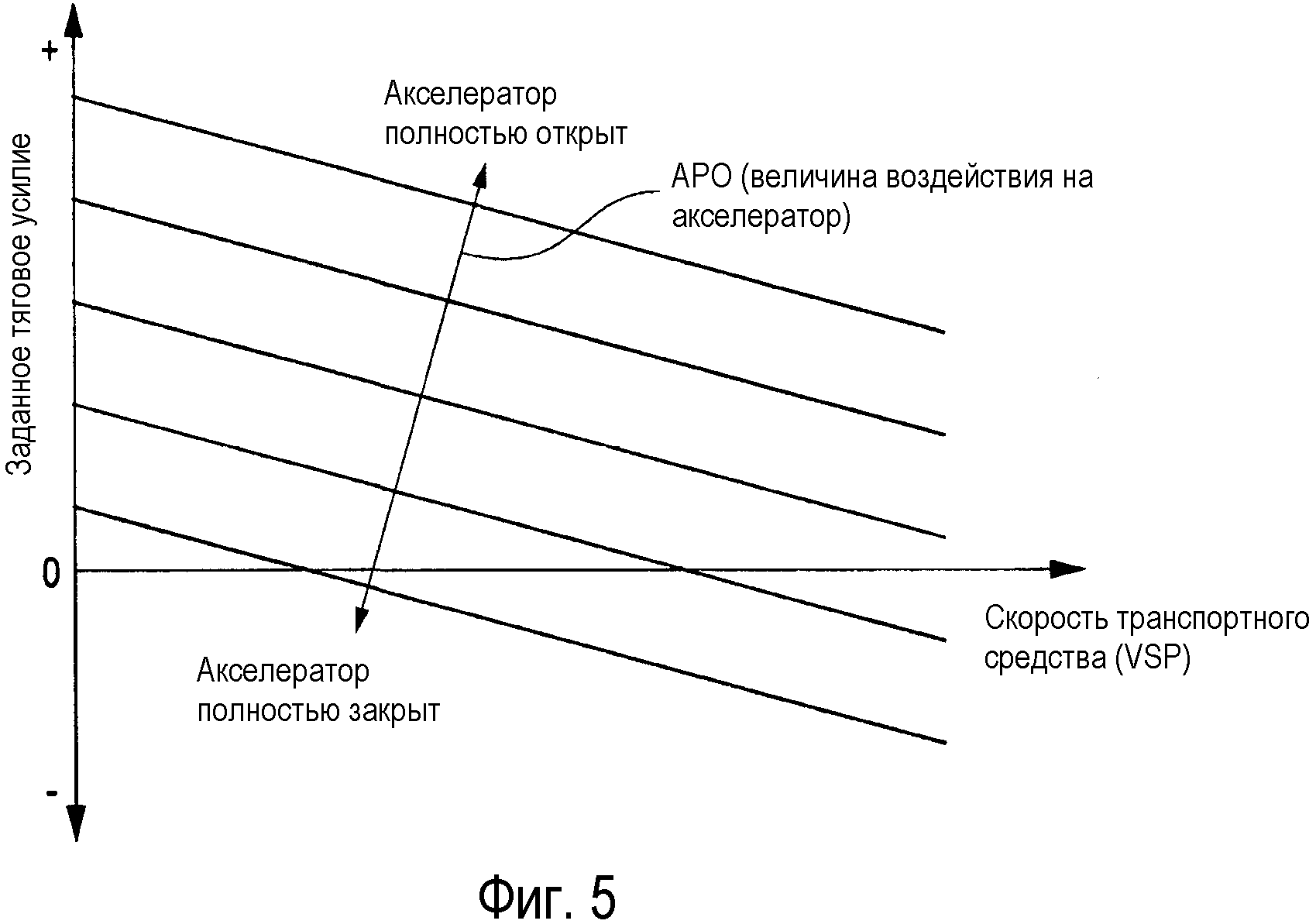
Фиг. 5 изображает диаграмму, где показан пример взаимосвязи между скоростью транспортного средства, величиной перемещения педали акселератора и тяговым усилием, которая запоминается контроллером;
Фиг. 6 изображает блок-схему, где показана процедура управления прокладкой маршрута, выполняемая автомобильным навигационным контроллером;
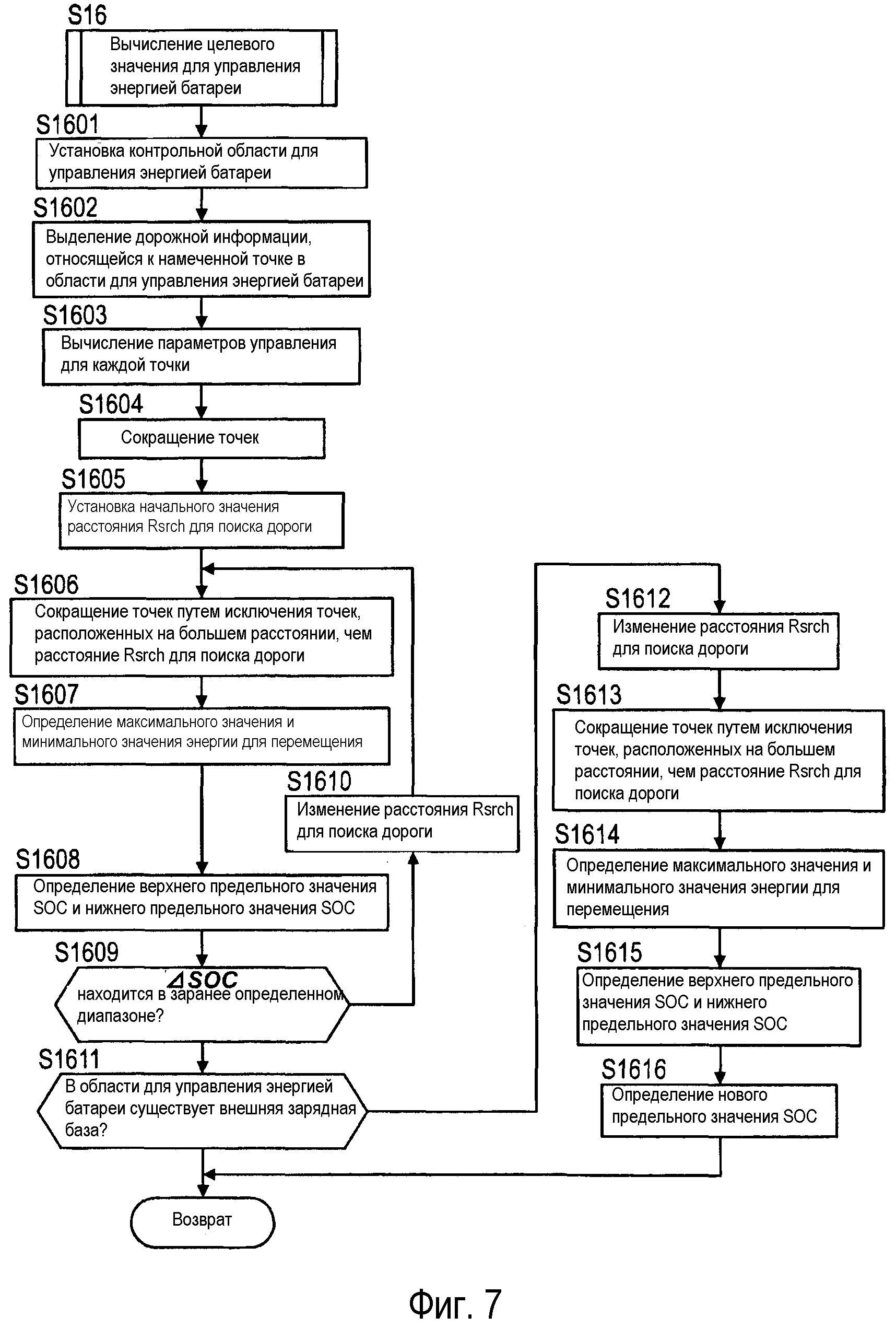
Фиг. 7 изображает блок-схему, где показана процедура вычисления целевых значений для управления, выполняемая автомобильным навигационным контроллером;
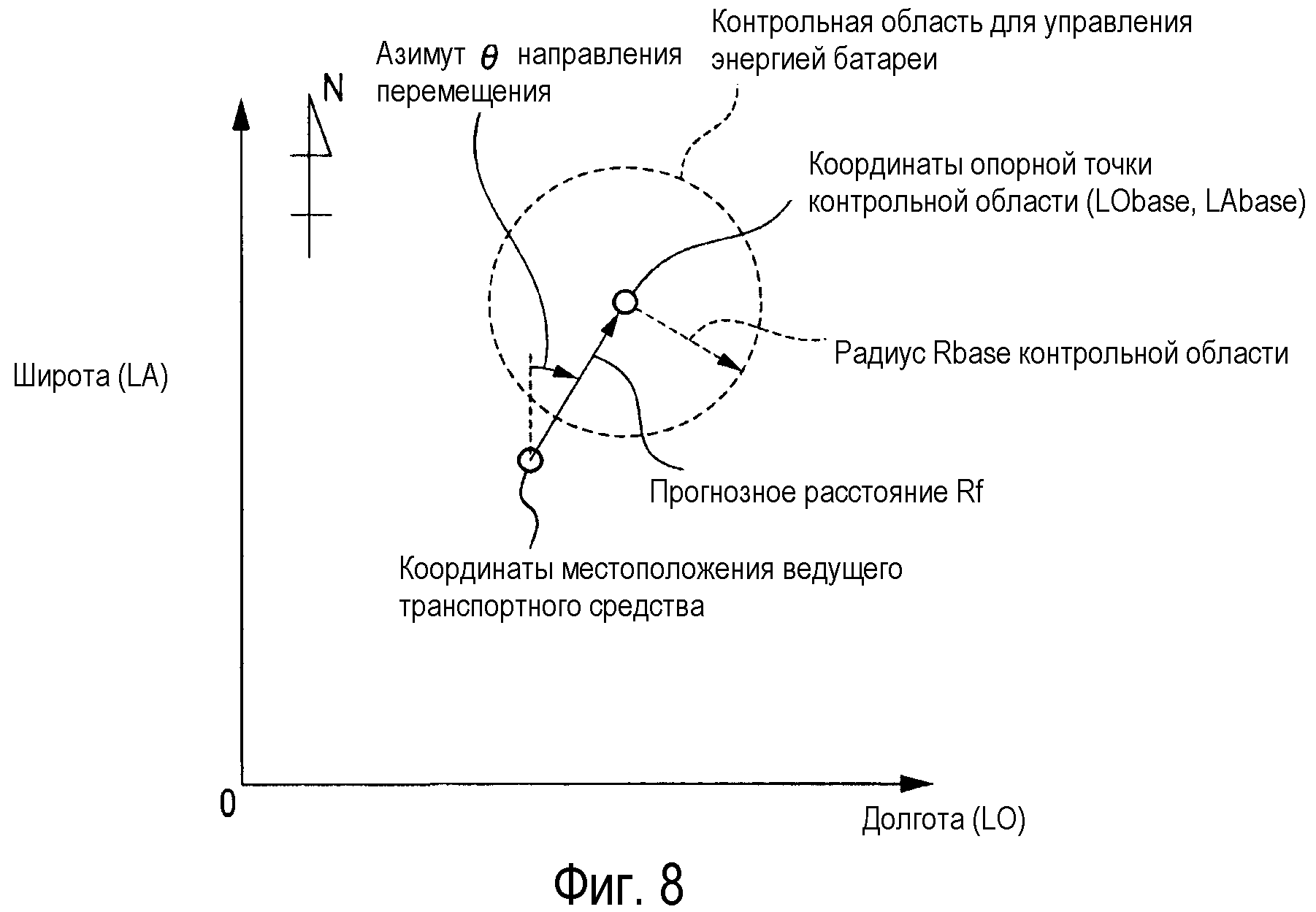
Фиг. 8 изображает диаграмму, где показан пример контрольной области для управления энергией батареи;
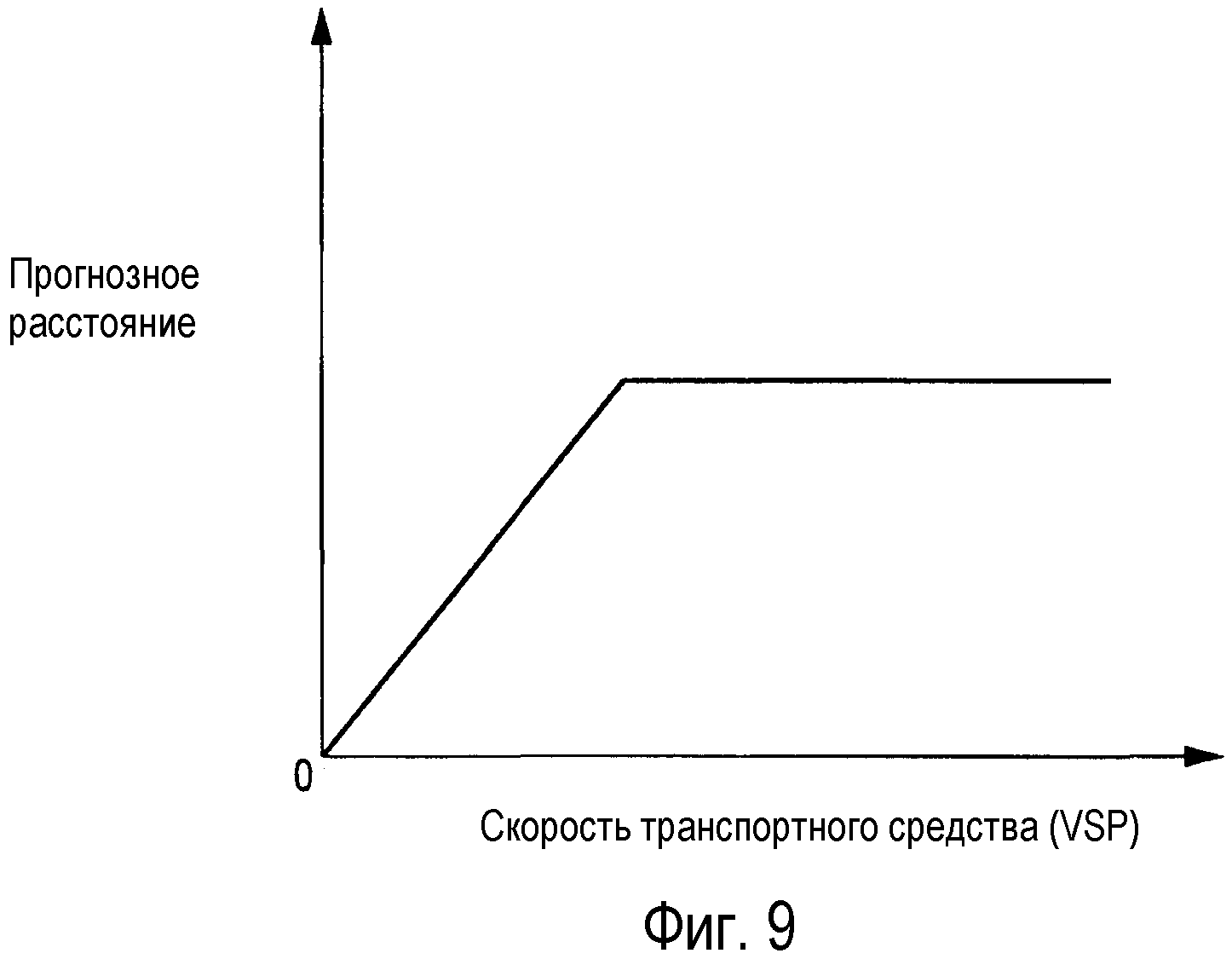
Фиг. 9 изображает примерную диаграмму, показывающую взаимосвязь между скоростью транспортного средства и прогнозным расстоянием, которое запоминается контроллером;
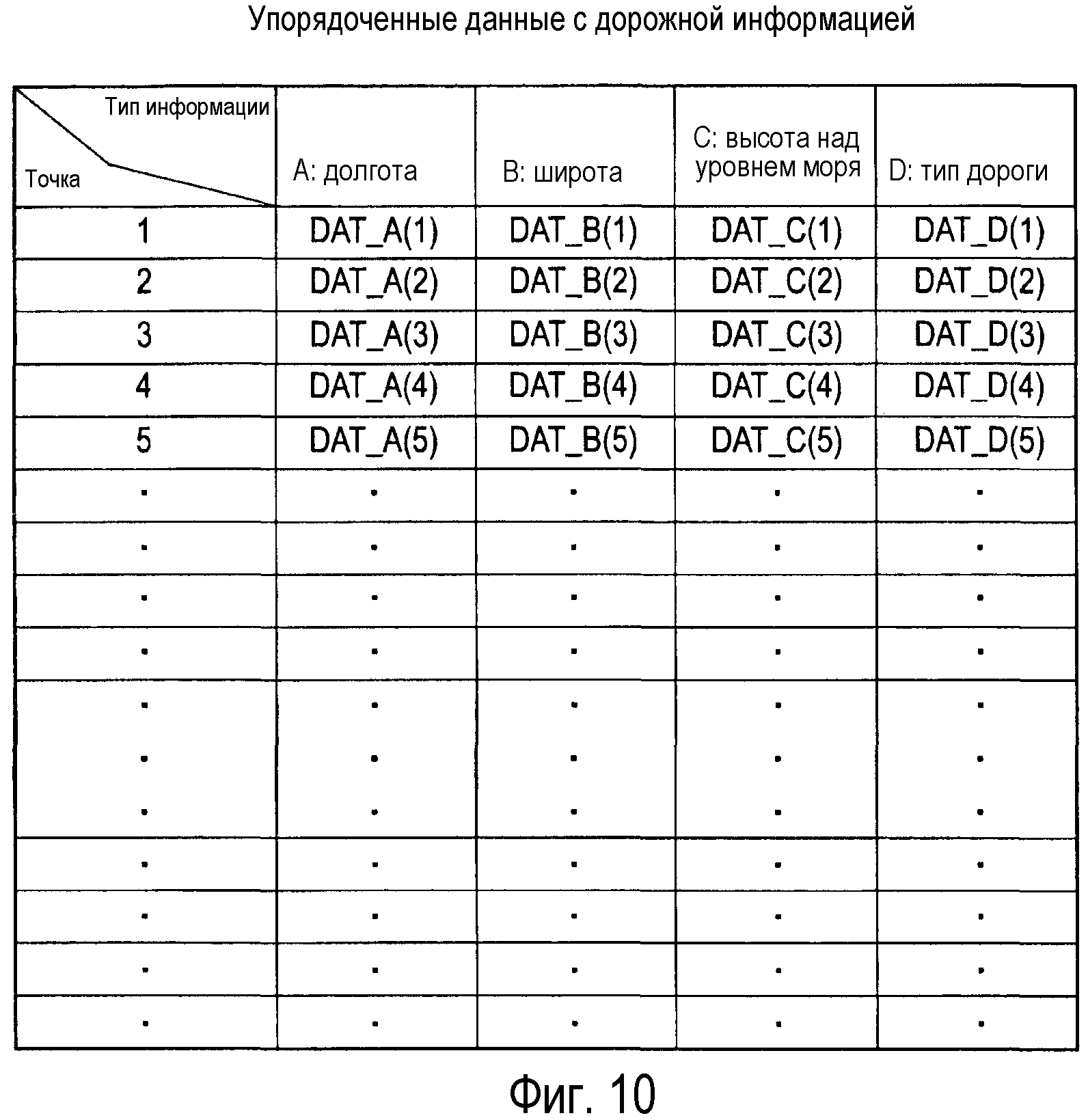
Фиг. 10 изображает таблицу, где показан пример упорядоченных данных, запоминаемых в буфере данных на этапе S1602 по фиг. 7;
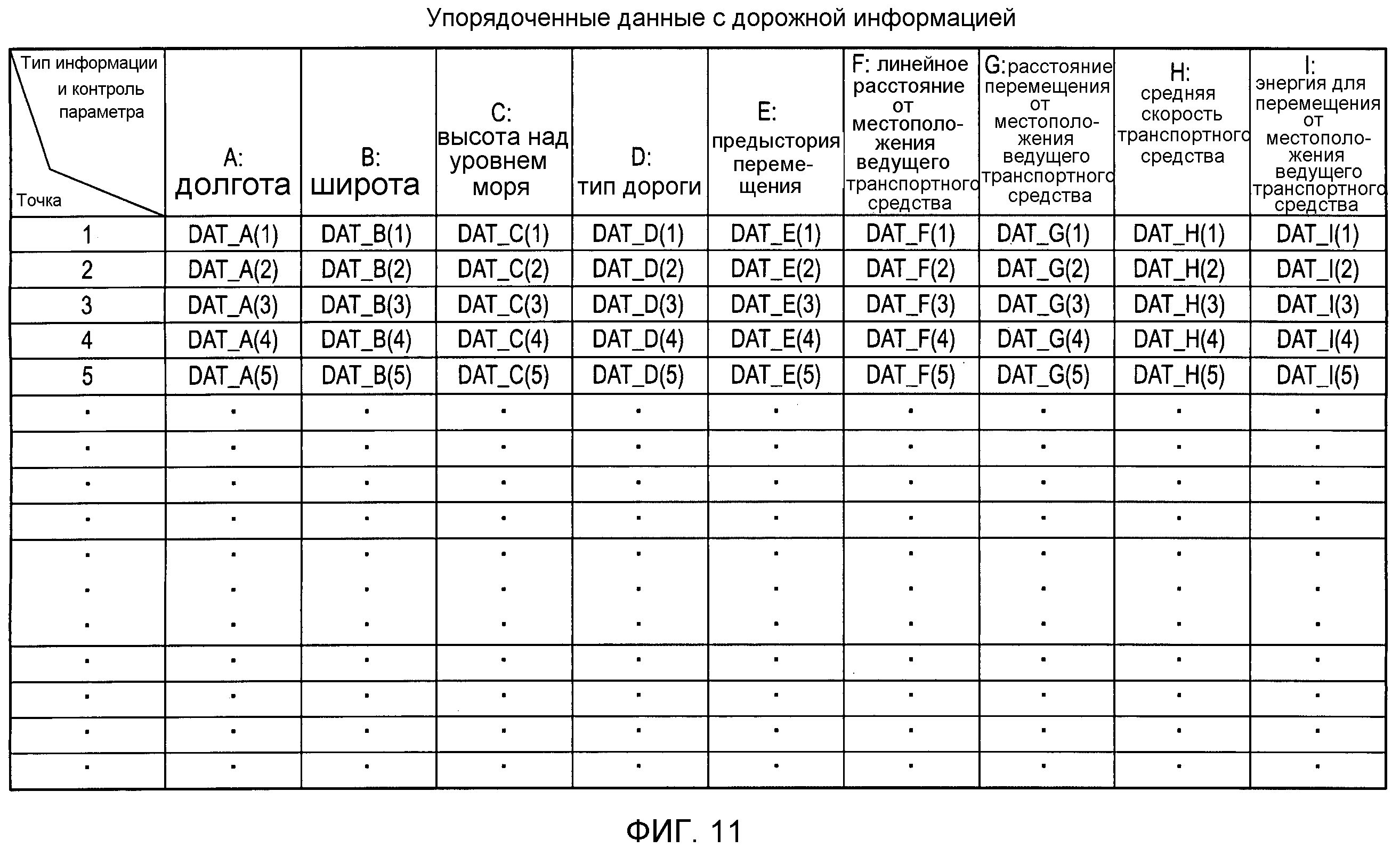
Фиг. 11 изображает таблицу, где показан пример упорядоченных данных, запоминаемых в буфере данных на этапе S1603 по фиг. 7;
Фиг. 12 изображает примерную диаграмму, показывающую взаимосвязь между средней скоростью транспортного средства и средним сопротивлением движению, которая запоминается контроллером;
Фигуры 13А-13В изображают примерные диаграммы, показывающие взаимосвязь между минимальным значением энергии для перемещения и верхним предельным значением заряженности (SOC) батареи и взаимосвязь между максимальным значением энергии для перемещения и нижним предельным значением SOC, которые запоминаются контроллером;
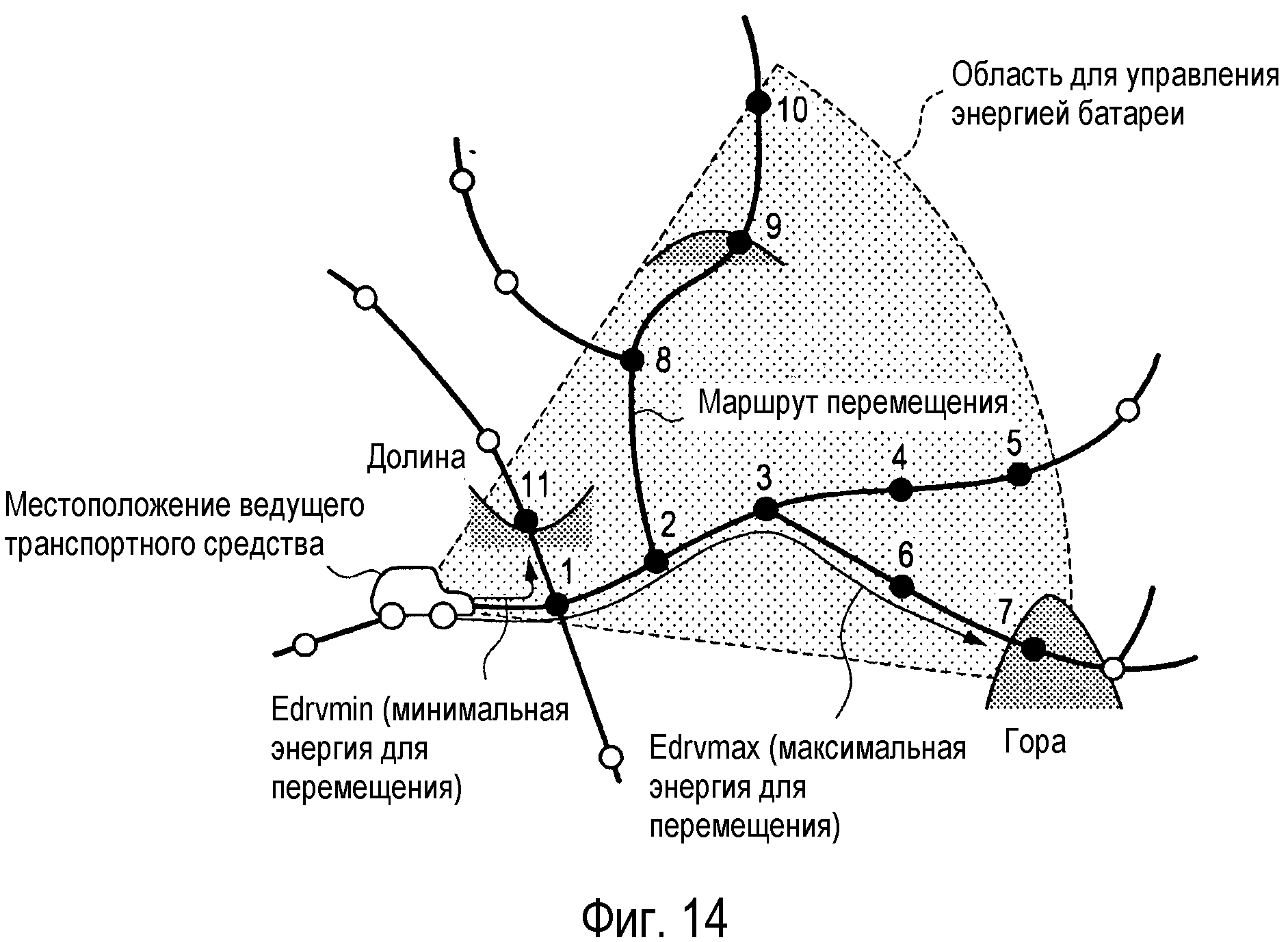
Фиг. 14 изображает диаграмму, иллюстрирующую функционирование системы согласно данному варианту;
Фигуры 15А-15В изображают примерные диаграммы, показывающие взаимосвязь между верхним предельным значением SOC и нижним предельным значением SOC батареи;
Фиг. 16 изображает диаграмму, иллюстрирующую функционирование системы согласно данному варианту в случае сокращения области управления энергией батареи;
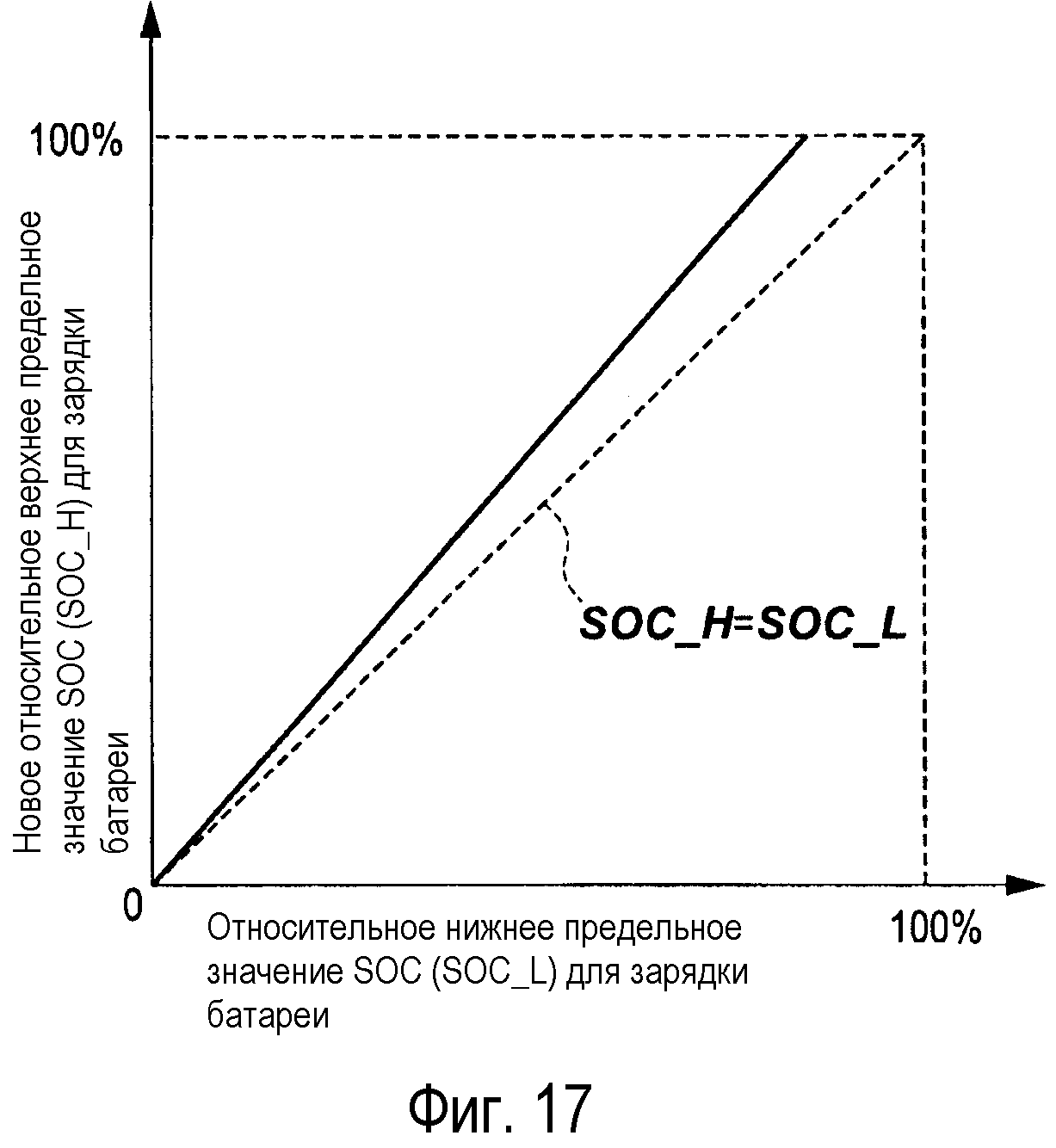
Фиг. 17 изображает диаграмму примера взаимосвязи, запоминаемого контроллером, между верхним предельным значением SOC и нижним предельным значением SOC в том случае, когда в области для управления энергией батареи существует внешняя зарядная база;
Фиг. 18 изображает временную диаграмму функционирования согласно данному варианту;
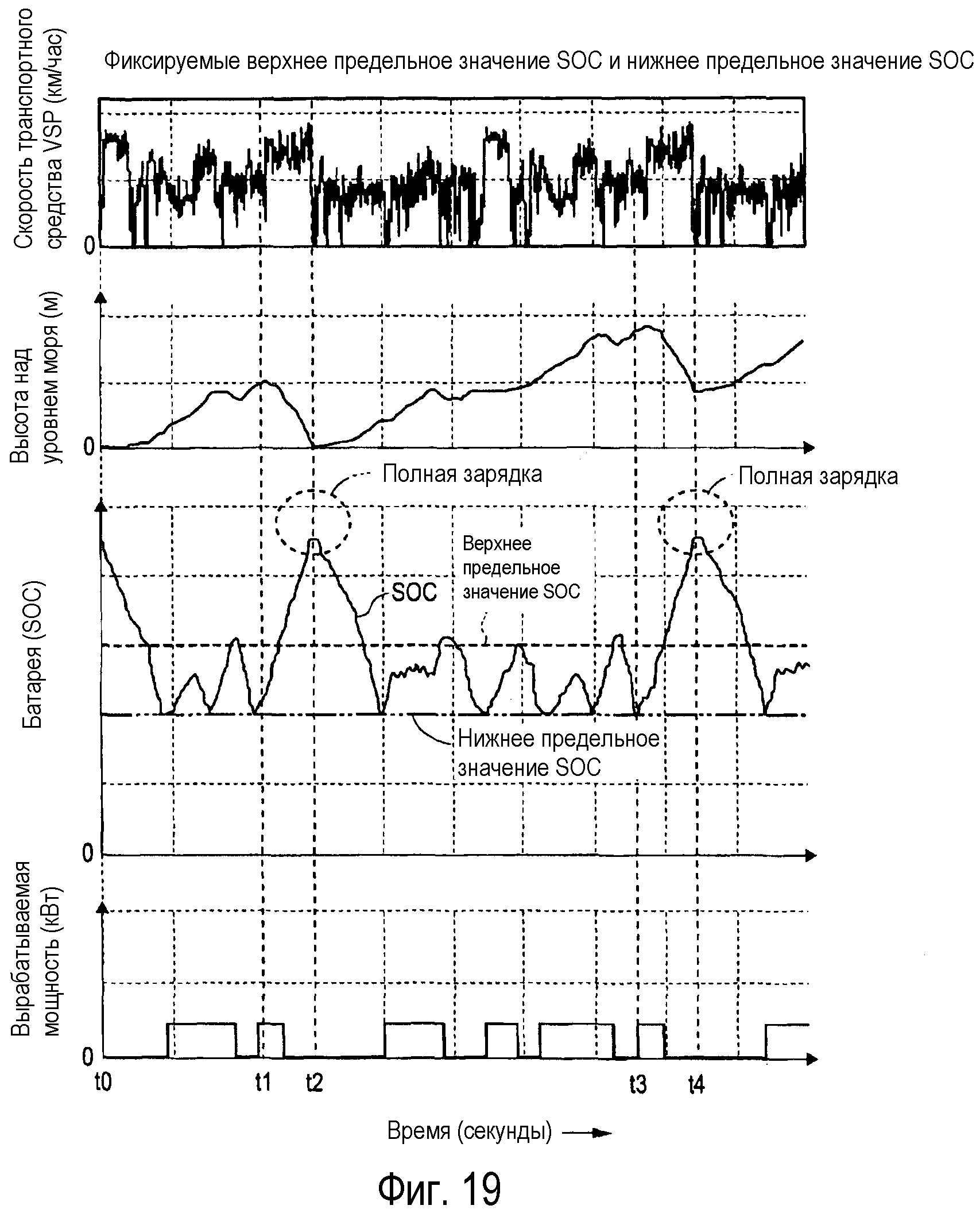
Фиг. 19 изображает временную диаграмму функционирования согласно сравнительному варианту;
Фигуры 20А-20В изображают диаграммы, иллюстрирующие случай, когда область управления энергией батареи сокращается;
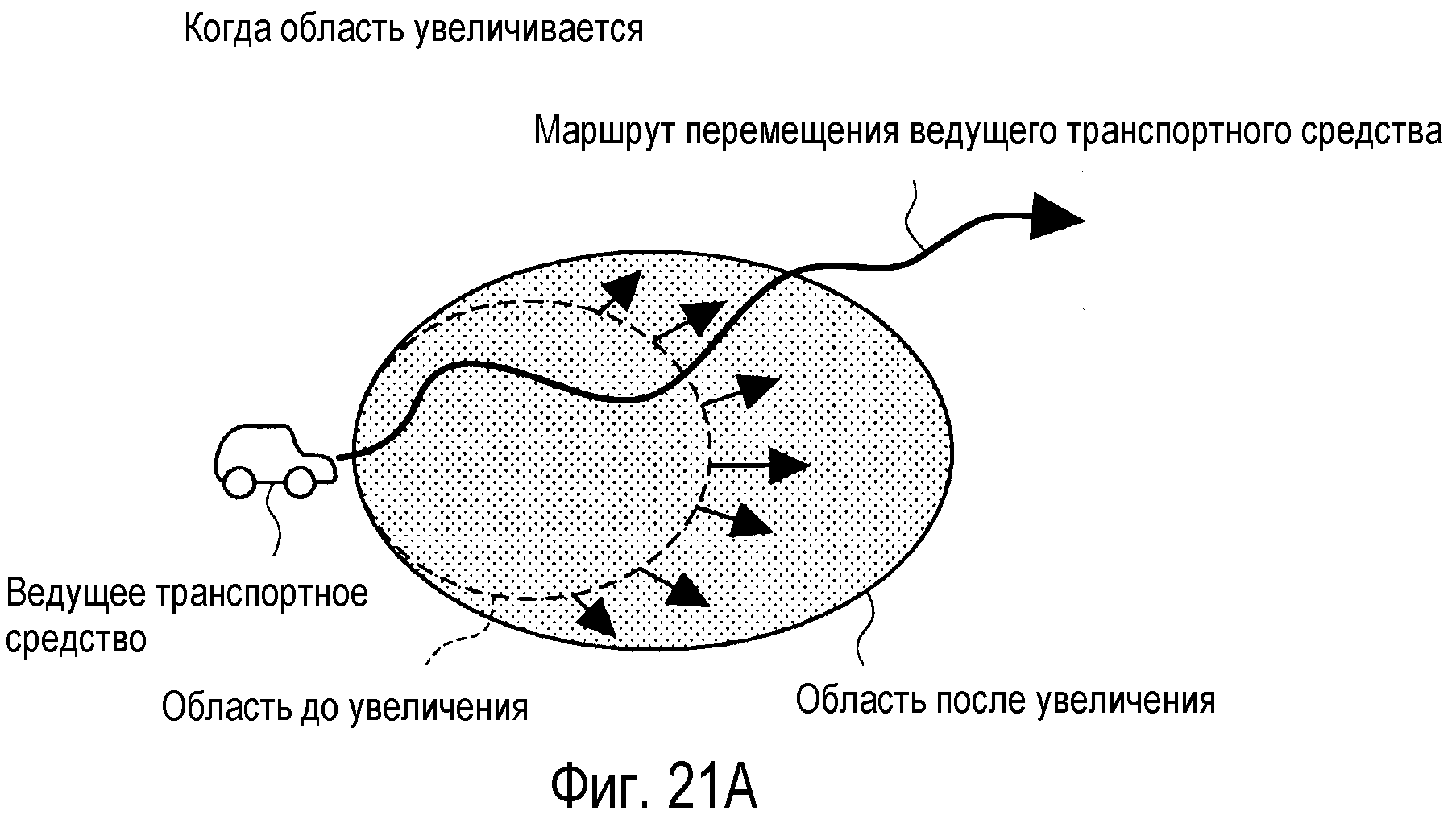
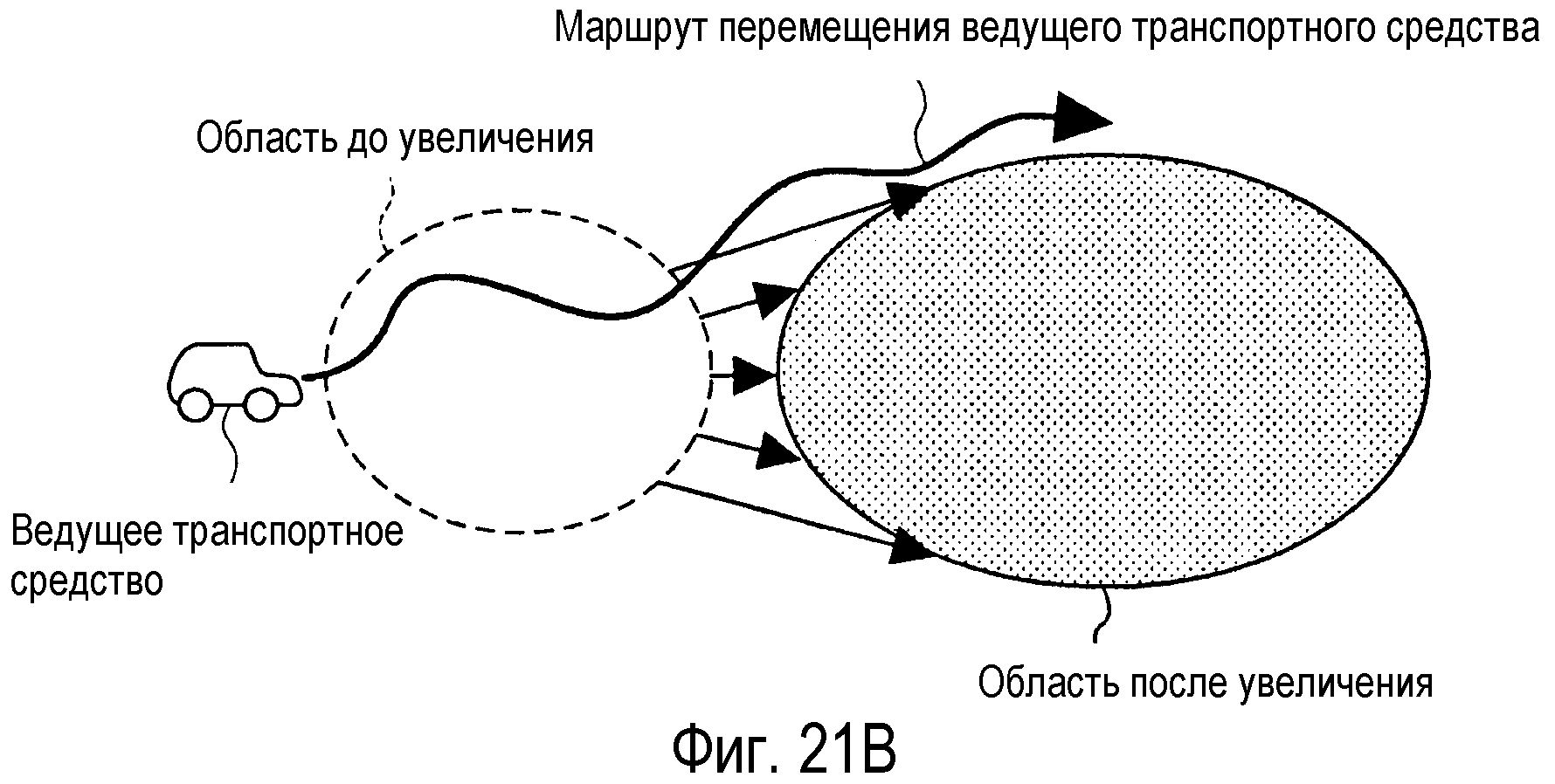
Фигуры 21А-21В изображают диаграммы, иллюстрирующие случай, когда область управления энергией батареи увеличивается;
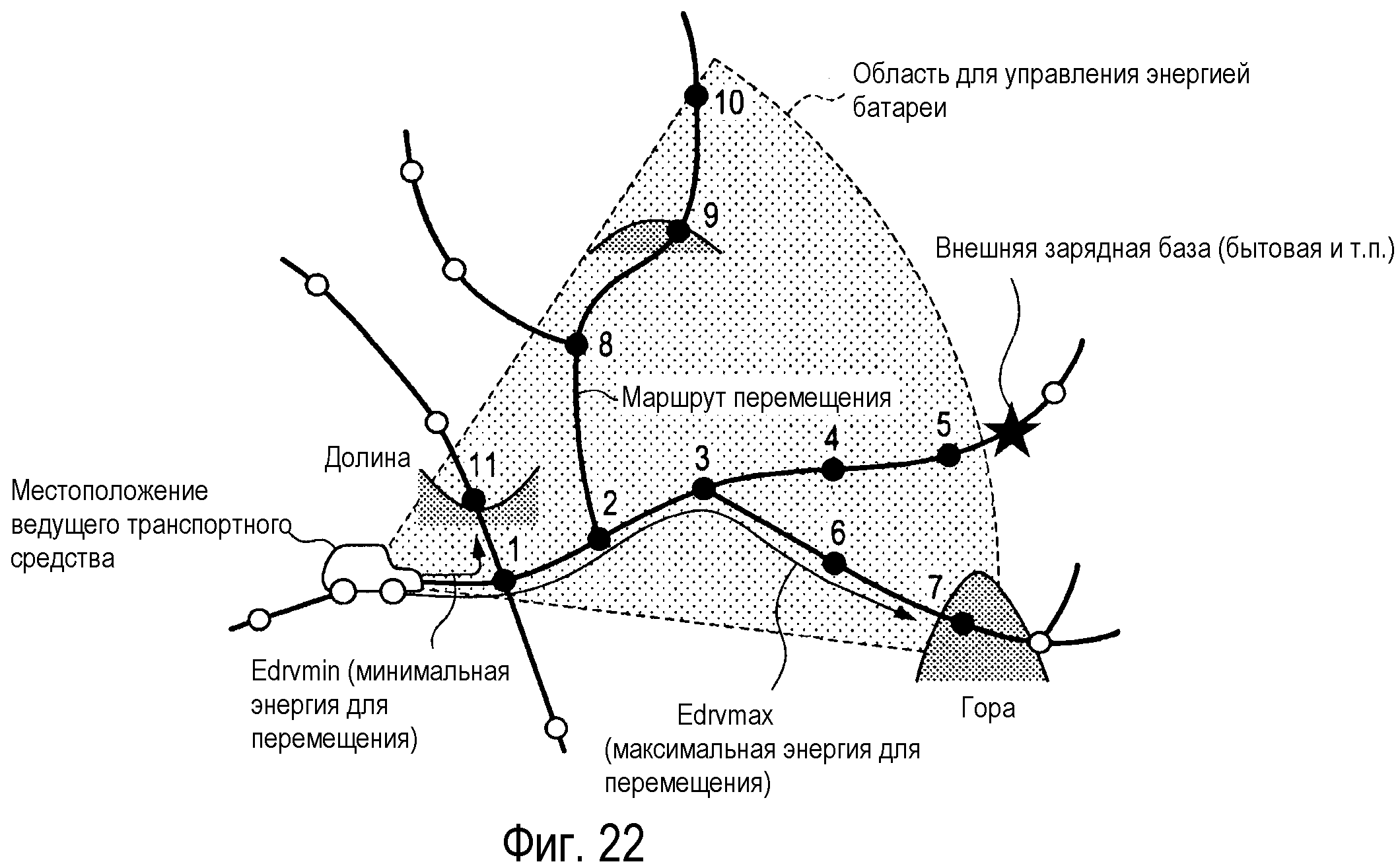
Фиг. 22 изображает диаграмму, иллюстрирующую состояние, в котором внешняя зарядная база существует вне области для управления энергией батареи перед местоположением ведущего транспортного средства в направлении перемещения;
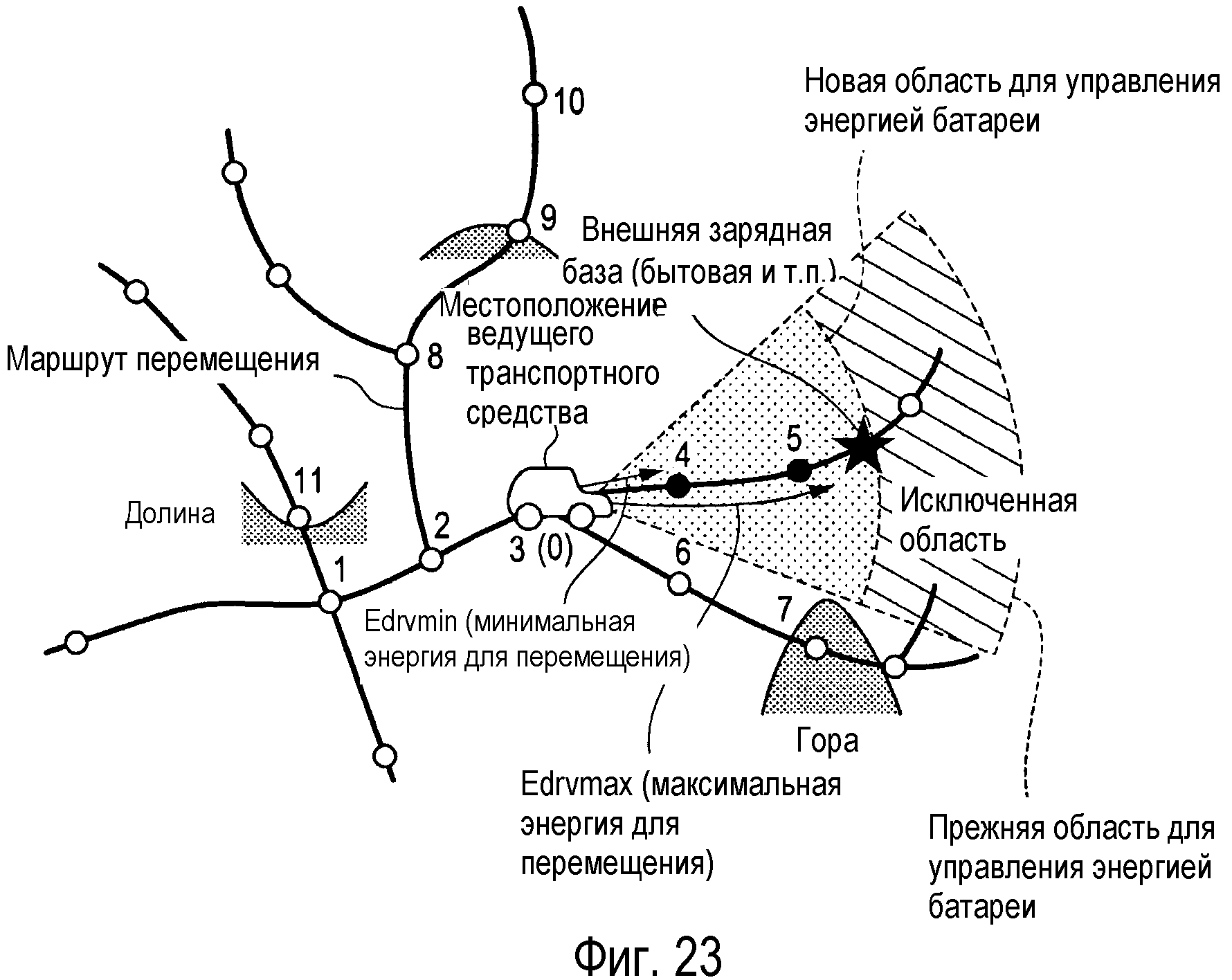
Фиг. 23 изображает диаграмму, иллюстрирующую состояние, в котором ведущее транспортное средство перемещается из состояния, показанного на фиг. 22, так что внешняя зарядная база оказывается в области для управления энергией батареи;
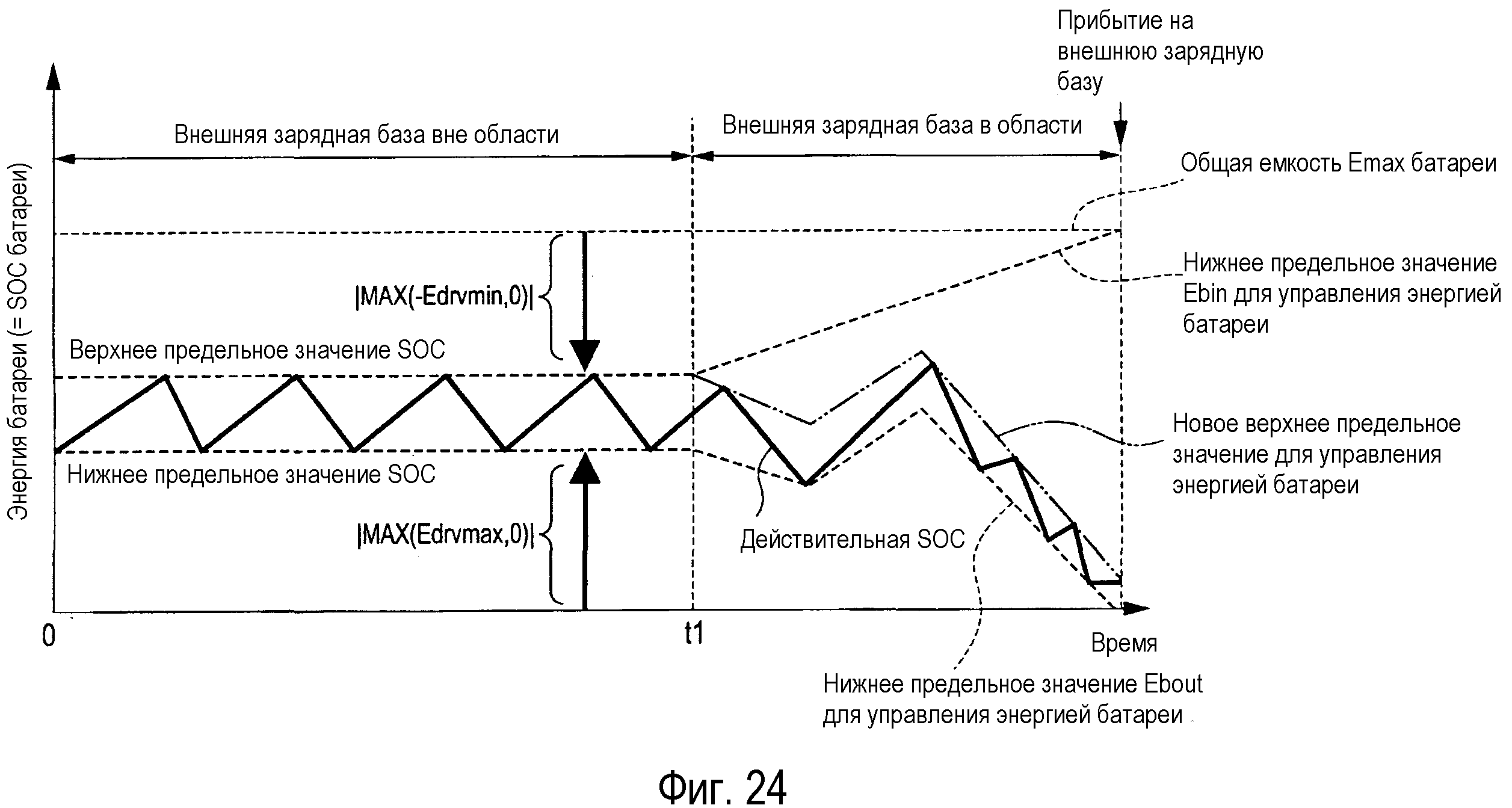
Фиг. 24 изображает временную диаграмму, показывающую изменение энергии батареи, когда внешняя зарядная база оказывается в области для управления энергией батареи.
Описание предпочтительных вариантов воплощения изобретения
Далее со ссылками на чертежи описывается вариант осуществления настоящего изобретения.
Силовая установка
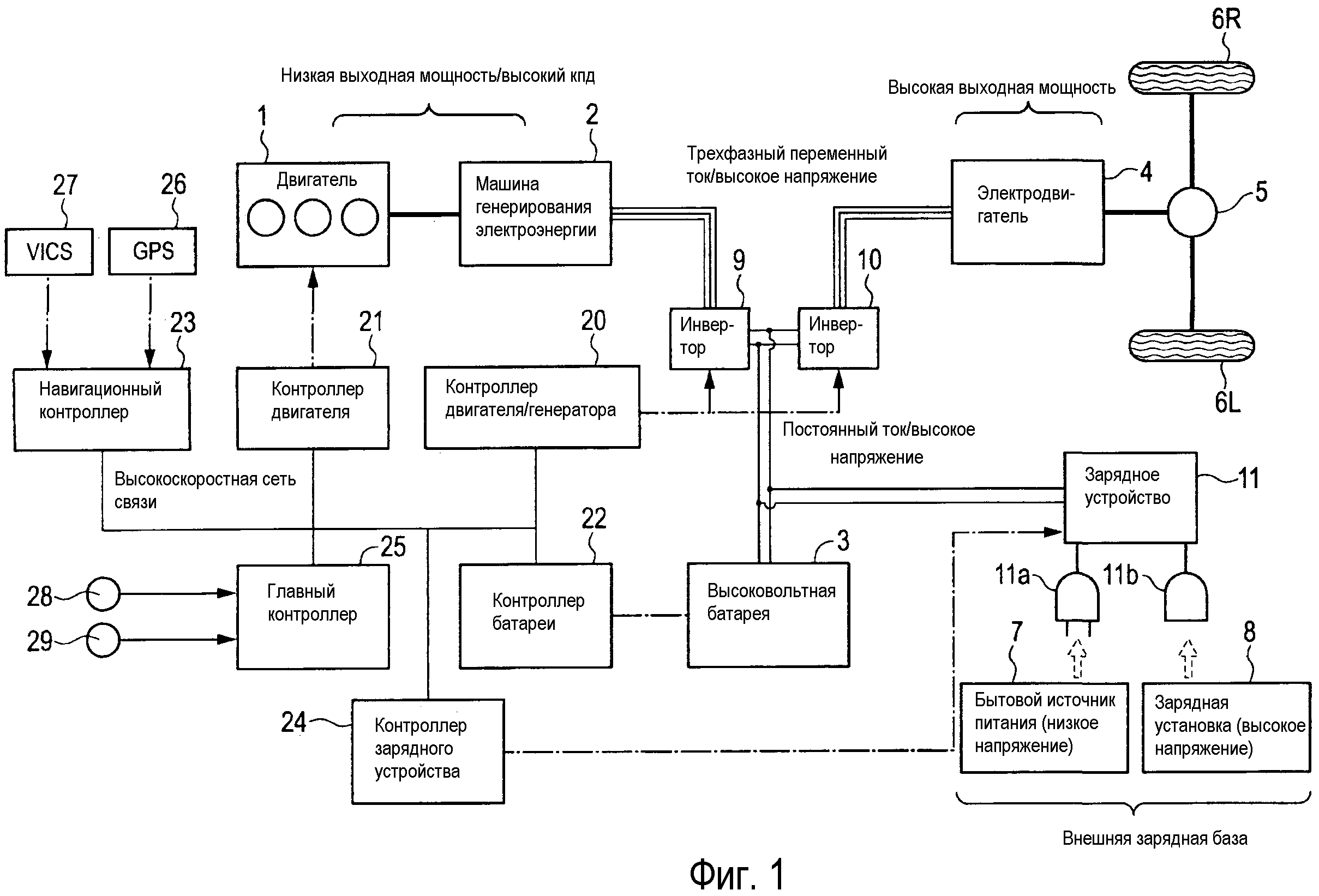
На фиг. 1 представлена схема системы, изображающая силовую установку и систему управления гибридного электромобиля, к которым применимо настоящее изобретение.
Показанный на фиг. 1 гибридный электромобиль (далее «HEV») относится к HEV последовательного типа, где батарея может заряжаться от внешнего источника питания. Следует заметить, что данное изобретение также применимо к HEV параллельного типа или HEV смешанного типа. Настоящее изобретение также применимо к транспортным средствам HEV, в которых не предусмотрена зарядка от внешнего источника питания.
HEV, показанный на фиг. 1, включает в себя двигатель 1, машину 2 генерирования электроэнергии, инвертор 9, батарею 3, инвертор 10, электродвигатель 4, конечную понижающую передачу 5, левое приводное колесо 6L, правое приводное колесо 6R и зарядное устройство 11.
Двигатель 1 приводит в движение машину 2 генерирования электроэнергии. Машина 2 генерирования электроэнергии генерирует электроэнергию, когда приводится в движение двигателем 1. Машина 2 генерирования электроэнергии также действует в качестве стартера, который запускает двигатель 1, при ее возбуждении от батареи 3. Машина 2 генерирования электроэнергии представляет собой высоковольтную трехфазную машину. Инвертор 9 подсоединен между машиной 2 генерирования электроэнергии и батареей 3. Инвертор 9 представляет собой преобразователь переменного тока в постоянный (AC/DC). При выполнении AC/DC преобразования инвертор 9 управляет мощностью между машиной 2 генерирования электроэнергии и батареей 3.
Батарея 3 установлена в HEV. Батарея 3 является высоковольтной батареей. Батарея 3 заряжается энергией, вырабатываемой машиной 2 генерирования электроэнергии. Батарея 3 также заряжается энергией, подаваемой от бытового источника питания 7 или зарядной установки (оборудование для коммерческого использования) 8, служащей в качестве внешней зарядной базы, через зарядное устройство 11. Батарея 30 подает питание на электродвигатель 4, когда это необходимо.
Инвертор 10 подсоединен между батареей 3 и электродвигателем 4. Инвертор 10 представляет собой AC/DC преобразователь. При выполнении AC/DC преобразования инвертор 10 управляет потоком энергии между батареей и электродвигателем 4.
Электродвигатель 4 является высоковольтной трехфазной машиной. Электродвигатель 4 создает тяговое усилие, используя мощность, подаваемую от батареи 3. Электродвигатель 4 приводит в движение левое приводное колесо 6L и правое приводное колесо 6R. Электродвигатель 4 также имеет функцию рекуперативного торможения для зарядки батареи 3 путем преобразования энергии вращения левого приводного колеса 6L и правого приводного колеса 6R в электроэнергию при замедлении транспортного средства.
Конечная понижающая передача 5 включает в себя устройство дифференциальной передачи. Конечная понижающая передача 5 расположена между электродвигателем 4 и левым и правым приводными колесами 6L, 6R.
Левое приводное колесо 6L и правое приводное колесо 6R приводятся в движение тяговым усилием, создаваемым электродвигателем 4.
Зарядное устройство 11 подсоединено к батарее 3. Зарядное устройство 11 включает в себя разъем 11а и разъем 11b. Разъем 11а вставляют в бытовой источник 7 питания. Разъем 11b вставляют в источник питания зарядной установки 8. Бытовой источник 7 питания представляет собой низковольтный внешний источник питания. Источником питания зарядной установки 8 является высоковольтный внешний источник питания. При использовании зарядной установки 8 обеспечивается быстрая зарядка батареи 3.
В автомобиле HEV данного типа двигатель 1 приводит в движение машину 2 генерирования электроэнергии. В результате машина 2 генерирования электроэнергии генерирует электрическую энергию. Эта энергия обеспечивает зарядку батареи 3, служащей в качестве источника питания, установленного на транспортном средстве. Запасенная в батарее энергия подается в электродвигатель 4, когда это необходимо. В результате электродвигатель 4 создает тяговое усилие. Тяговое усилие приводит в движение левое приводное колесо 6L и правое приводное колесо 6R через конечную понижающую передачу 5.
Таким образом, согласно настоящему изобретению, двигатель 1 и машина 2 генерирования электроэнергии образуют устройство генерирования электроэнергии, установленное на транспортном средстве. Электродвигатель 4 согласно настоящему изобретению соответствует источнику энергии для перемещения.
Следует заметить, что при использовании в этом варианте в качестве двигателя 1 и машины 2 генерирования электроэнергии небольших устройств, имеющих сравнительно низкую выходную мощность и сравнительно высокий кпд, достигается повышение кпд и снижение затрат. Дополнительно, при использовании в качестве электродвигателя 4 большого двигателя сравнительно высокой мощности улучшается управляемость (повышается быстродействие).
Система управления
Далее описывается установленный на транспортном средстве контроллер, управляющий вышеуказанной силовой установкой.
Установленный на транспортном средстве контроллер включает в себя контроллер 20 электродвигателя/генератора, контроллер 21 двигателя, контроллер 22 батареи, автомобильный навигационный контроллер 23, контроллер 24 зарядного устройства и главный контроллер 25 силовой установки.
Контроллер 20 электродвигателя/генератора увеличивает и уменьшает входной/выходной крутящий момент (генераторная нагрузка) машины 2 генерирования электроэнергии путем управления инвертором 9. Контроллер 20 электродвигателя/генератора увеличивает и уменьшает входной/выходной крутящий момент (двигательная нагрузка) электродвигателя 4 путем управления инвертором 10.
Контроллер 21 двигателя управляет выходным крутящим моментом двигателя путем регулировки количества поступающего воздуха, установки угла опережения зажигания и количества впрыскиваемого топлива двигателя 1.
Контроллер 22 батареи оценивает значения характеристик внутреннего состояния батареи, такие как состояние заряда (SOC) и энергия заряда/разряда и выполняет защиту батареи.
Автомобильный навигационный контроллер 23 детектирует местоположение ведущего транспортного средства, принимая сигнал (сигнал GPS) от системы 26 глобального позиционирования (далее «GPS»). В этой связи автомобильный навигационный контроллер 23 соответствует блоку детектирования местоположения ведущего транспортного средства. Автомобильный навигационный контроллер 23 также загружает данные карты (дорога, высота над уровнем моря, градиент дороги, кривизна дороги и т.д.), хранящиеся на носителе, например, на DVD. Автомобильный навигационный контроллер 23 также получает данные связи (информацию о пробках и т.п.) от наземной дорожной инфраструктуры (например, системы автомобильной информации и связи (далее «VICS»)). На основе этих данных автомобильный навигационной контроллер 23 осуществляет поиск маршрута к месту назначения и прокладывает маршрут для водителя к месту назначения.
Контроллер 24 зарядного устройства управляет работой зарядного устройства 11, выполняя или прекращая зарядку батареи 3 с использованием энергии от бытового источника 7 питания или зарядной установки 8.
Главный контроллер 25 силовой установки управляет контроллерами 20-24, координируя управление электродвигателем 4 в соответствии с запросами водителя и управление двигателем 1 и машиной 2 генерирования электроэнергии с учетом управляемости и топливной экономичности.
Управление зарядкой батареи
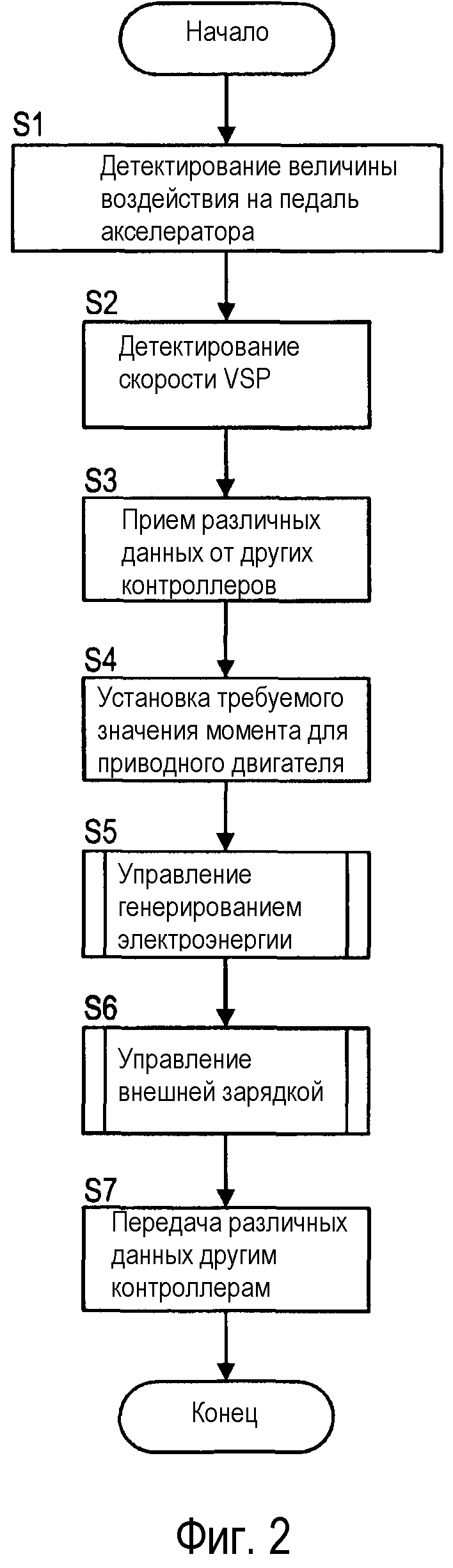
Контроллеры 20-25 осуществляют связь друг с другом по высокоскоростной сети связи для совместного использования различных данных. Главный контроллер 25 силовой установки управляет зарядкой батареи, выполняя программы управления, показанные на фигурах 2-4, на основе указанных совместно используемых данных. На фиг. 2 представлена блок-схема, где показана основная процедура, выполняемая главным контроллером 25. Главный контроллер 25 выполняет основную процедуру многократно с фиксированными периодическими интервалами.
На этапе S1 контроллер 25 детектирует величину воздействия водителя на педаль акселератора (APO). В частности, контроллер 25 детектирует ход педали акселератора при ее нажатии на основе выходного сигнала от датчика 28 (потенциометра) величины воздействия на педаль акселератора.
На этапе S2 контроллер 25 детектирует скорость VSP транспортного средства. В частности, контроллер 25 детектирует скорость VSP транспортного средства на основе выходного сигнала от датчика 29 скорости колеса транспортного средства, который генерирует импульсный сигнал с частотой, соответствующей скорости вращения приводных колес. Следует заметить, что скорость VSP транспортного средства можно детектировать путем преобразования частоты, измеренной в разное время, в скорость VSP транспортного средства в реальном времени.
На этапе S3 контроллер 25 считывает из приемного буфера различные данные, описываемые ниже, которые он получает от контроллеров 20-24 через высокоскоростную сеть связи. В частности, контроллер 25 считывает скорость вращения машины 2 генерирования электрической энергии и скорость вращения электродвигателя 4 из контроллера 20 электродвигателя/генератора. Дополнительно, контроллер 25 считывает флаг определения запуска и скорость вращения двигателя 1 из контроллера 21 двигателя. Контроллер 25 также считывает значение заряженности (далее обозначенную как «SOC») батареи 3 из контроллера 22 батареи. Дополнительно, контроллер 25 считывает верхнее предельное значение SOC батареи, необходимое для управления (далее называемое «верхнее предельное значение SOC»), и нижнее предельное значение SOC батареи, необходимое для управления (далее называемое «нижнее предельное значение SOC»), которые определяются автомобильным навигационным контроллером 23 способом, описываемым ниже. Контроллер 25 дополнительно принимает от контроллера 24 зарядки информацию, указывающую, подсоединен ли к разъему 11а зарядки бытовой источник 7 питания, и информацию, указывающую, подсоединена ли к разъему 11b зарядки зарядная установка 8. Когда к разъему 11а зарядки подсоединен бытовой источник 7 питания, контроллер 25 принимает информацию о зарядной мощности, относящуюся к бытовому источнику 7 питания. Когда к разъему 11а зарядки подсоединена зарядная установка 8, контроллер 25 принимает информацию о зарядной мощности, относящуюся к зарядной установке 8.
На этапе S4 контроллер 25 устанавливает требуемое значение крутящего момента, прикладываемого к электродвигателю 4. В частности, контроллер 25 детектирует заданное тяговое усилие транспортного средства путем использования величины APO воздействия на педаль акселератора и скорости VSP транспортного средства для диаграммы, показанной на фиг. 5, и устанавливает требуемое значение крутящего момента электродвигателя 4 путем умножения заданного тягового усилия на константу (эффективный радиус шины/передаточное отношение понижающей передачи). Когда требуется коррекция крутящего момента для подавления вибрации, вызванной скручиванием приводного вала, причем крутящий момент может быть скорректирован с использованием известной процедуры.
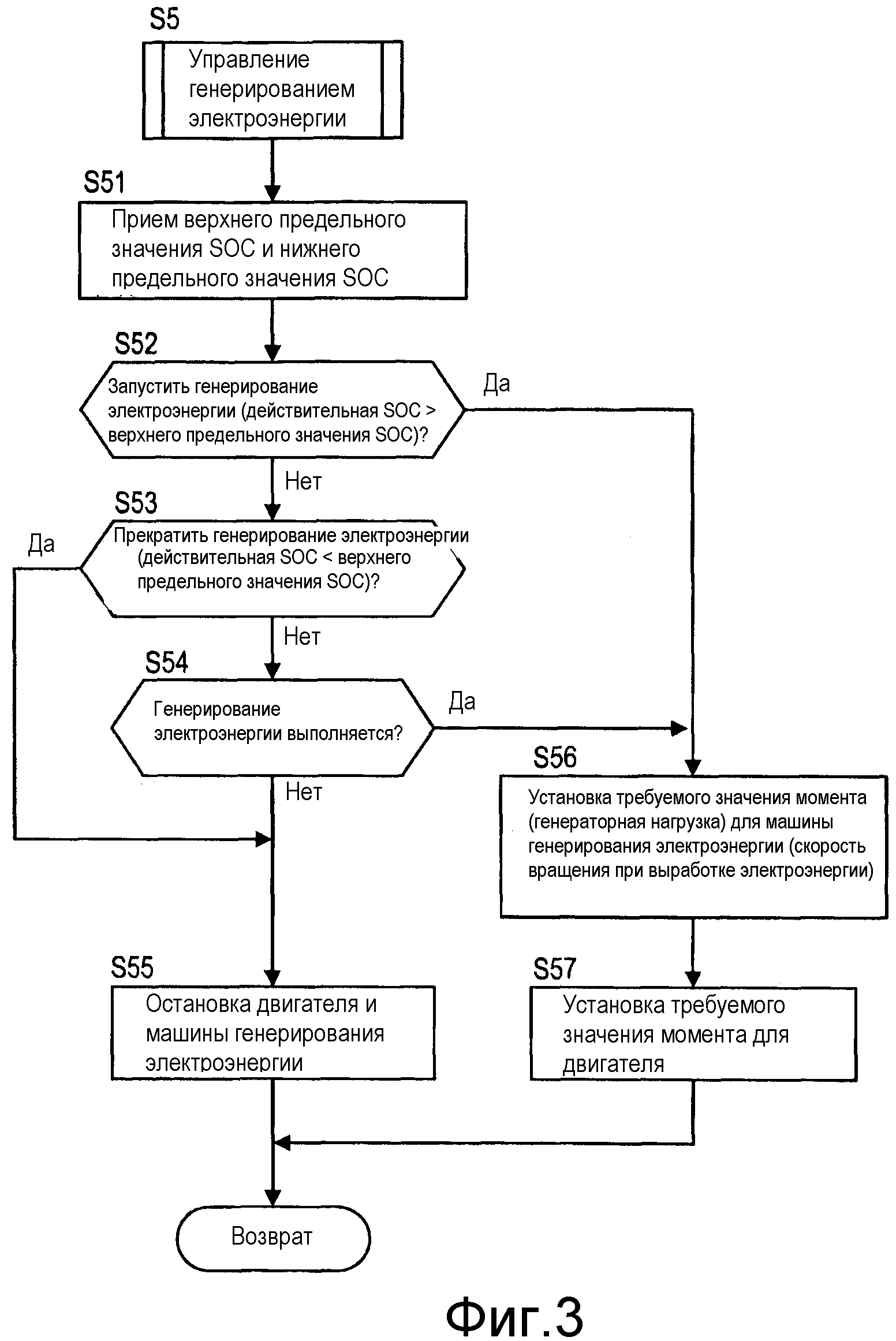
На этапе S5 контроллер 25 осуществляет управление зарядкой посредством генерирования электроэнергии с помощью двигателя внутреннего сгорания (далее называемого «управление выработкой электроэнергии с помощью двигателя»). В частности, контроллер 25 вычисляет требуемое значение крутящего момента для двигателя 1 и требуемое значение генераторной нагрузки для машины 2 генерирования электроэнергии на основе верхнего предельного значения SOC и нижнего предельного значения SOC, полученных на этапе S3, и текущего значения SOC (далее называемого «действительная SOC») батареи 3. Этап S5 соответствует блоку управления зарядкой.
Далее следует более подробное описание этапа S5 с использованием фиг. 3.
На этапе S51 контроллер 25 получает от автомобильного навигационного контроллера 23 верхнее предельное значение SOC и нижнее предельное значение SOC.
На этапе S52 контроллер 25 определяет, следует ли начать генерирование электроэнергии. В частности, контроллер 25 принимает решение о начале генерирования электроэнергии, когда действительное значение SOC меньше нижнего предельного значения SOC.
На этапе S53 контроллер 25 определяет, прекратить ли генерирование электроэнергии. В частности, контроллер 25 принимает решение о прекращении генерирования электроэнергии, когда действительное значение SOC больше верхнего предельного значения SOC.
На этапе S54 контроллер 25 определяет, осуществляется ли генерирование электроэнергии, или, другими словами, осуществлялось ли генерирование электроэнергии в предыдущем периоде вычислений.
На этапе S55 контроллер 25 устанавливает в нуль требуемое значение крутящего момента двигателя и требуемое значение крутящего момента машины генерирования электроэнергии (генераторная нагрузка), чтобы остановить двигатель 1 и машину 2 генерирования электроэнергии, а затем возвращается к управлению на этапе S6 по фиг. 2.
На этапе S56 контроллер 25 вычисляет требуемое значение крутящего момента машины генерирования электроэнергии (генераторная нагрузка) путем вычисления управляющего воздействия для обратной связи по скорости вращения с использованием в качестве целевого значения скорости Ng вращения, при которой двигатель 1 и машина 2 генерирования электроэнергии могут эффективно вырабатывать электроэнергию. Здесь требуемое значение крутящего момента машины генерирования электроэнергии представляет собой значение генераторной нагрузки и, следовательно, имеет отрицательное значение. Машина 2 генерирования электроэнергии вырабатывает электроэнергию для зарядки батареи 3.
На этапе S57 контроллер 25 вычисляет целевую выходную мощность двигателя на основе верхнего предельного значения SOC, нижнего предельного значения SOC и действительного значения SOC. Затем контроллер 25 определяет требуемое значение крутящего момента двигателя, при котором целевая выходная мощность двигателя может быть реализована при скорости Ng вращения, описанной выше, а затем возвращается к управлению на этапе S6 по фиг. 2. Следует заметить, что целевая выходная мощность двигателя по существу равна выходной мощности при генерировании электроэнергии.
Таким образом, если определено, что на этапе S54 генерирование электроэнергии осуществляется в настоящий момент, то контроллер 25 переходит к управлению на этапах S56 и S57, а, если определено, что генерирование электроэнергии не происходит, то контроллер 25 переходит к управлению на этапе S55. Таким образом, контроллер 25 поддерживает текущее состояние генерирования электроэнергии.
Как очевидно из приведенного выше описания, управление генерированием электроэнергии с помощью двигателя 1, показанное на фиг. 3, выполняется для обеспечения того, чтобы действительное значение SOC было меньше верхнего предельного значения SOC (верхнее предельное значение для управления энергией батареи), и было больше нижнего предельного значения SOC (нижнее предельное значение для управления энергией батареи).
Далее со ссылками на фиг. 4 описывается управление процессом внешней зарядки, выполняемое на этапе S6 по фиг. 2.
Управление внешней зарядкой выполняется тогда, когда батарея 3 заряжается энергией извне, например, от бытового источника 7 питания или зарядной установки 8, другими словами, от внешней зарядной базы.
На этапе S601 контроллер 25 определяет, имеется ли запрос водителя на внешнюю зарядку. В частности, контроллер 25 может определить, запросил ли водитель внешнюю зарядку, исходя из состояния переключателя внешней зарядки, расположенного рядом с сиденьем водителя, или от автомобильной навигационной системы. Если указанный запрос имеется, то контроллер 25 устанавливает значение флага запроса внешней зарядки равным единице. Если запрос отсутствует, то контроллер 25 устанавливает значение флага запроса внешней зарядки равным нулю.
На этапе S602 контроллер 25 определяет, был ли сделан запрос на внешнюю зарядку, путем определения того, равно ли единице значение флага запроса на внешнюю зарядку. Если запрос на внешнюю зарядку отсутствует, то контроллер 25 выходит из процедуры по фиг. 4 и возвращается к управлению на этапе S7 по фиг. 2. Если запрос на внешнюю зарядку имеется, то контроллер 25 переходит к управлению на этапе S603.
На этапе S603 контроллер 25 определяет, движется ли транспортное средство. Если транспортное средство движется, то контроллер 25 не может выполнить внешнюю зарядку. Следовательно, когда автомобиль движется, контроллер 25 выходит из процедуры по фиг. 4 и возвращается к управлению на этапе S7 по фиг. 2. Когда транспортное средство не движется, контроллер 25 переходит к управлению на этапе S604.
На этапе S604 контроллер 25 дает команду водителю ввести целевое значение SOC, которое должно быть достигнуто в момент завершения внешней зарядки (далее называемый «целевое значение SOC по завершении внешней зарядки»). Водитель вводит целевое значение SOC по завершении внешней зарядки с помощью переключателя, расположенного рядом с сиденьем водителя, или, например, устройства ввода автомобильной навигационной системы.
На этапе S605 контроллер 25 определяет, возможна ли внешняя зарядка. В частности, когда бытовой источник 7 питания подсоединен к разъему 11а внешней зарядки, контроллер определяет, что внешняя зарядка возможна. В альтернативном варианте, когда к разъему 11b внешней зарядки подсоединена зарядная установка 8, контроллер 25 определяет, что внешняя зарядка возможна. Контроллер 25 ждет, пока не станет возможным внешняя зарядка, и когда внешняя зарядка становится возможной, переходит к управлению на этапе S606.
На этапе S606 контроллер 25 определяет, достигло ли действительное значение SOC целевого значения SOC по завершении внешней зарядки.
На этапе S607 контроллер 25 устанавливает значение флага выполнения внешней зарядки равным 1, и продолжает внешнюю зарядку.
На этапе S608 контроллер 25 определяет, подсоединен ли разъем 11а внешней зарядки или разъем 11b внешней зарядки. Если это так, то контроллер 25 переходит к управлению на этапе S606. Благодаря выполнению вышеописанной обработки, поддерживается подсоединение разъема 11а или 11b внешней зарядки (этап S608), и благодаря продолжению внешней зарядки (этап S607) действительное значение SOC возрастает. Как только действительное значение SOC достигнет целевого значения SOC по завершении внешней зарядки, управление переходит с этапа S606 на этап S610. Когда разъем 11а внешней зарядки или разъем 11b внешней зарядки окажется выдернутым в ходе внешней зарядки (прерывание соединения), контроллер 25 переходит к управлению на этапе S609.
На этапе S609 контроллер 25 информирует водителя о том, что разъем 11а внешней зарядки или разъем 11b внешней зарядки выдернут, в результате чего имеет место прерывание внешней зарядки. Водитель может быть проинформирован о прерывании внешней зарядки путем отображения соответствующей информации на экране автомобильной навигационной системы. В альтернативном варианте может быть выдано голосовое сообщение.
На этапе S610 контроллер 25 информирует водителя о том, что действительное значение SOC достигло целевого значения SOC завершения внешней зарядки, что приводит к завершению внешней зарядки. Водитель может быть проинформирован о завершении внешней зарядки путем отображения соответствующей информации на экране автомобильной навигационной системы. В альтернативном варианте может быть выдано речевое сообщение.
На этапе S611 контроллер 25 устанавливает значение флага выполнения внешней зарядки в нуль, чтобы прекратить внешнюю зарядку, а затем управление переходит к этапу S7 по фиг. 2.
Вернемся к фиг. 2, где на этапе S7 контроллер 25 передает на соответствующие контроллеры через высокоскоростную сеть связи, показанную на фиг. 1: флаг выполнения внешней зарядки, установленный/сброшенный на этапах S607 и S611 по фиг. 4; требуемое значение крутящего момента двигателя, определенное на этапах S55 и S57 по фиг. 3; требуемое значение крутящего момента машины генерирования электроэнергии, определенное на этапах S55 и S56 по фиг. 3; требуемое значение крутящего момента электродвигателя, определенное на этапе S4 по фиг. 2; и флаг запроса остановки/запуска двигателя, созданный на этапах S55 и S57 по фиг. 3. Затем контроллеры выполняют соответствующие команды.
Верхнее предельное значение SOC и нижнее предельное значение SOC
Далее описываются целевые значения для управления энергией батареи (верхнее предельное значение SOC и нижнее предельное значение SOC), полученные главным контроллером на этапе S51 по фиг. 3.
Целевые значения для управления энергией батареи (верхнее предельное значение SOC и нижнее предельное значение SOC) вычисляются вычислительной программой, показанной на фиг. 7, когда автомобильный навигационный контроллер 23 выполняет навигационное управление транспортным средством, показанное на фиг. 6. В этом варианте автомобильный навигационный контроллер 23 выполняет указанную вычислительную программу, но эту программу не обязательно должен выполнять автомобильный навигационный контролер 23, поскольку ее может выполнять другой контроллер, отличный от автомобильного навигационного контроллера 23, начиная с главного контроллера 25.
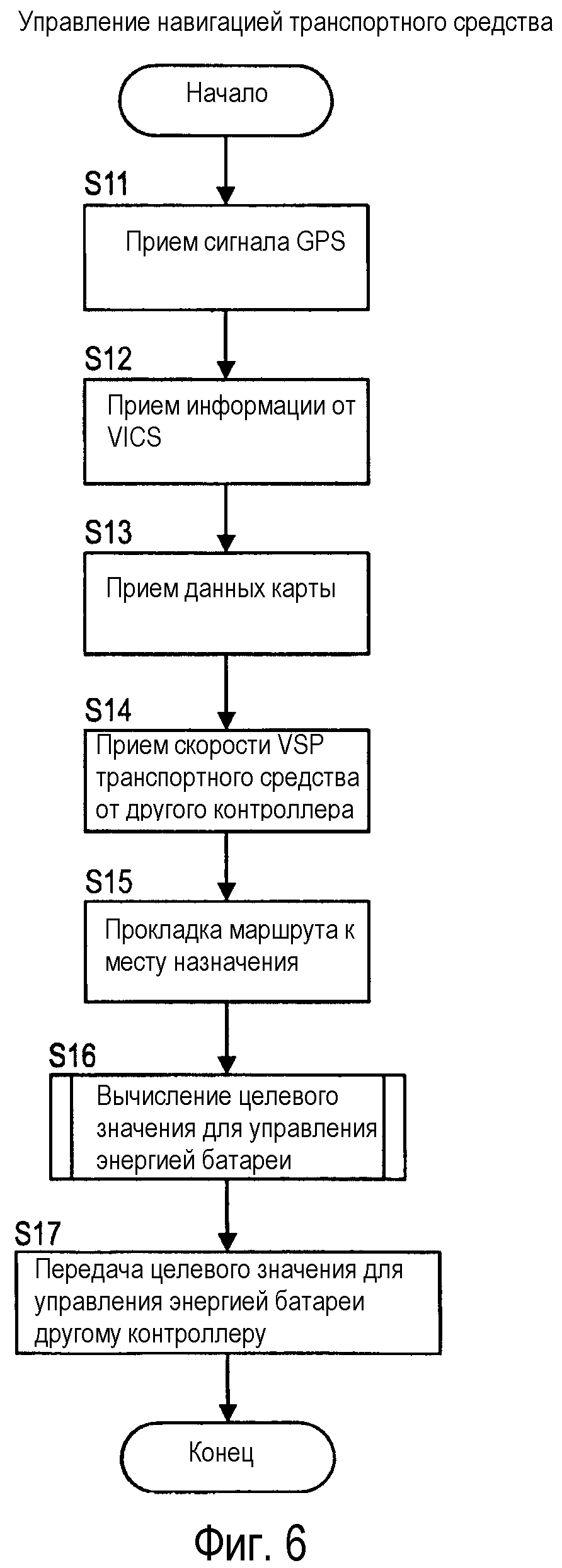
Во всех случаях показанная на фиг. 6 автомобильная навигационная программа выполняется многократно с фиксированными периодическими интервалами вычислений. Соответственно, программа вычисления целевых значений для управления энергией батареи, показанная на фиг. 7, также выполняется многократно с идентичными фиксированными периодическими интервалами.
На этапе S11 получают информацию о местоположении ведущего транспортного средства (долгота, широта, высота над уровнем моря) и информацию о направлении перемещения ведущего транспортного средства на основе сигнала GPS от спутника 26 Глобальной системы позиционирования (далее называемый «спутник GPS»).
На этапе S12 контроллер 23 принимает дорожную информацию, например, информацию о пробках на дорогах, относящуюся к району, где находится ведущее транспортное средство, от наземной инфраструктуры 27 трафика (например, от системы VICS) и записывает полученную информацию в приемный буфер. Следует заметить, что информация о пробках может быть получена от системы, отличной от системы VICS.
На этапе S13 контроллер 23 получает данные карты (маршрут, высота над уровнем моря, градиент дороги, кривизна дороги и т.д.), относящиеся к дорогам вблизи местонахождения ведущего транспортного средства, с носителя данных, например, DVD, и записывает полученные данные в приемный буфер.
На этапе S14 контроллер 23 получает значение скорости VSP транспортного средства, детектированное главным контроллером 25 на этапе S2 по фиг. 2, и записывает полученное значение скорости VSP транспортного средства в приемный буфер.
На этапе S15 контроллер 23 прокладывает маршрут от текущего местоположения ведущего транспортного средства до места назначения на основе информации о местоположении ведущего транспортного средства (долгота, широта, высота над уровнем моря), информации о направлении перемещения ведущего транспортного средства, данные карты (маршрут, высота над уровнем моря, градиент дороги, кривизна дороги и т.д.), записанные в приемном буфере, и информации о месте назначения, установленной водителем. Затем контроллер 23 направляет водителя по маршруту, используя изображения и голос.
Автомобильный навигационный контроллер обеспечивает прокладку маршрута, применяя способ, уже нашедший практическое использование, в связи с чем его подробное описание опущено.
На этапе S16 контроллер 23 устанавливает целевые значения для управления энергией батареи (верхнее предельное значение SOC и нижнее предельное значение SOC). Конкретное содержание этой процедуры установки будет описано ниже.
На этапе S17 контроллер 23 передает заданные значения для управления энергией батареи (верхнее предельное значение SOC и нижнее предельное значение SOC) на главный контроллер 25. Как было описано выше, главный контроллер 25 получает заданные значения для управления энергией батареи (верхнее предельное значение SOC и нижнее предельное значение SOC) на этапе S51 по фиг. 3.
На фиг. 7 представлена блок-схема, иллюстрирующая процедуру, выполняемую контроллером 23 для установки целевых значений для управления энергией батареи (верхнее предельное значение SOC и нижнее предельное значение SOC).
В этом варианте целевые значения для управления энергией батареи (верхнее предельное значение SOC и нижнее предельное значение SOC) вычисляют на основе информации о местоположении ведущего транспортного средства (долгота, широта, высота над уровнем моря) и информации о направлении перемещения ведущего транспортного средства (азимут), полученной из сигнала GPS и данных карты (маршрут, высота над уровнем моря, градиент дороги, кривизна дороги и т.д.), записанных в приемном буфере. Далее описывается конкретное содержание этой процедуры.
На этапе S1601 контроллер 23 устанавливает контрольную область с информацией о дороге (контрольная область для управления энергией батареи), в которой выполняется поиск для управления энергией батареи на основе информации о местоположении ведущего транспортного средства (долгота, широта, высота над уровнем моря), информации о направлении перемещения ведущего транспортного средства и скорости VSP транспортного средства. Этап S1601 соответствует блоку установки области управления.
Далее подробно описывается контрольная область для управления энергией батареи. Контроллер 23 устанавливает контрольную область в качестве максимальной области поиска дорожной информации для управления энергией батареи. Затем контроллер 23 устанавливает верхнее предельное значение SOC и нижнее предельное значение SOC, постепенно сужая область поиска. Установка верхнего предельного значения SOC и нижнего предельного значения SOC при постепенном сужении области поиска является ключевым моментом этого варианта воплощения.
Следует заметить, что в последующем описании контрольная область для управления энергией батареи имеет форму круга, но эта область не обязательно должна иметь такую форму. Дополнительно, скорость VSP транспортного средства не ограничивается значением, вычисленным главным контроллером 25, но может быть вычислена, исходя из скорости изменения во времени информации о местоположении ведущего транспортного средства (долгота, широта), полученной из сигнала GPS.
На этапе S1601 контроллер 23 устанавливает контрольную область для управления энергией батареи. Далее со ссылками на фиг. 8 описывается конкретный способ такой установки.
Как показано на фиг. 8, контроллер 23 устанавливает в качестве контрольной области для управления энергией батареи окружность радиусом Rbase с центром в опорной точке области. Радиус Rbase контрольной области имеет произвольное заранее определенное значение. Координаты по долготе и широте (LObase, LAbase) точки контрольной области вычисляют, как показано ниже, на основе координат по долготе и широте (LOcur, LAcur) ведущего транспортного средства, азимута q, характеризующего направление перемещения ведущего транспортного средства, и прогнозного расстояния Rf, определенного, исходя из скорости VSP транспортного средства.
Прогнозное расстояние Rf определяют заранее путем использования скорости VSP транспортного средства применительно к графику, показанному в качестве примера на фиг. 9. Как видно из фиг. 9, когда скорость VSP транспортного средства ниже заранее определенного значения, прогнозное расстояние Rf увеличивается с ростом скорости VSP транспортного средства. Другими словами, в качестве точки отсчета контрольной области устанавливают точку, неизменно находящуюся далее по отношению к местоположению ведущего транспортного средства, когда скорость транспортного средства увеличивается. Когда скорость VSP транспортного средства превышает заранее определенное значение, прогнозное расстояние Rf остается постоянным независимо от скорости VSP транспортного средства. Когда скорость VSP транспортного средства равна нулю, местоположение ведущего транспортного средства и точка отсчета контрольной области совпадают, и, следовательно, контрольная область для управления энергией батареи устанавливается в виде окружности, имеющей радиус Rbase, с центром в местоположении ведущего транспортного средства.
На этапе S1602 контроллер 23 сравнивает контрольную область для управления энергией батареи с данными карты (маршрут, высота над уровнем моря, градиент дороги, кривизна дороги и т.д.), запомненными в приемном буфере. Затем контроллер 23 выделяет дорожную информацию, относящуюся к предназначенной точке по меньшей мере на одном проезжаемом маршруте в контрольной области для управления энергией батареи. Затем контроллер 23 запоминает выделенную дорожную информацию в буфере данных. На фиг. 10 показан пример упорядоченных данных, соответствующих запомненной рабочей информации. Для каждой намеченной точки i (i=1, 2, 3, 4, 5, …) запоминают четыре фрагмента дорожной информации DAT_A (i), DAT_B (i), DAT_C (i), DAT_D (i), где А - долгота, В - широта, С - высота над уровнем моря и D - тип дороги. Что касается типа дороги, то, например, узкая дорога отнесена к типу 0, обычная дорога отнесена к типу 1, региональная дорога отнесена к типу 2, а национальная дорога отнесена к типу 3. Этап S1602 соответствует блоку детектирования дорожной информации.
На этапе S1603 контроллер 23 вычисляет параметры управления, включая расстояние перемещения и энергию для перемещения из местоположения ведущего транспортного средства для каждой точки, используя дорожную информацию, выделенную на этапе S1602, информацию о местоположении ведущего транспортного средства и известную функцию поиска маршрута автомобильной навигационной системы на основе способа, описываемого ниже. Затем контроллер 23 добавляет вычисленные параметры управления к упорядоченным данным, созданным на этапе S1602 и показанным на фиг. 10, и запоминает результирующие данные. Этап S1603 соответствует блоку оценки энергии, необходимой для перемещения.
На фиг. 11 показан пример упорядоченных данных. К четырем фрагментам дорожной информации DAT_A (i), DAT_B (i), DAT_C (i), DAT_D (i), описанным выше, добавляют пять параметров управления: DAT_E (i), DAT_F (i), DAT_G (i), DAT_H (i), DAT_I (i), где E - предыстория перемещения от местоположения ведущего транспортного средства к каждой точке, F - линейное расстояние от местоположения ведущего транспортного средства, G - расстояние перемещения от местоположения ведущего транспортного средства до каждой точки, H - средняя скорость транспортного средства от местоположения ведущего транспортного средства до каждой точки, и I - энергия для перемещения от местоположения ведущего транспортного средства.
«Предысторию DAT_E (i) перемещения от местоположения ведущего транспортного средства до каждой точки» получают на основе данных о действительных перемещениях, записанных в автомобильном навигационном контроллере 23. Автомобильный навигационный контроллер 23 сортирует данные предыстории перемещения по трем типам, например: «нет предыстории перемещения», «предыстория перемещения с низкой частотой» и «предыстория перемещения с высокой частотой».
«Линейное расстояние DAT_F (i) от местоположения ведущего транспортного средства до каждой точки» получают, исходя из долготы DAT_A (i) точки, широты DAT_B (i) точки, долготы LOcur местоположения ведущего транспортного средства и широты LAcur местоположения ведущего транспортного средства с использованием следующего уравнения

«Расстояние DAT_G (i) перемещения от местоположения ведущего транспортного средства до каждой точки» получают, исходя из расстояния перемещения от местоположения ведущего транспортного средства до каждой точки, которое вычисляется автомобильной навигационной системой.
Расстояние перемещения от местоположения ведущего транспортного средства до каждой точки вычисляют с использованием хорошо известного способа, реализованного в автомобильных навигационных системах. Соответственно, подробное описание этого способа здесь опущено.
«Среднюю скорость DAT_H (i) транспортного средства от местоположения ведущего транспортного средства до каждой точки» получают путем деления расстояния DAT_G (i) перемещения на время перемещения, полученного с учетом информации о пробках (от системы VICS или т.п.).
Время перемещения по маршруту вычисляют с использованием хорошо известного способа, реализованного в автомобильных навигационных системах. В этой связи подробное описание этого способа здесь опущено.
«Энергия DAT_I (i) для перемещения от местоположения ведущего транспортного средства до каждой точки» представляет собой энергию, расходуемую при перемещении по меньшей мере по одному проезжаемому маршруту, найденному при вычислении «расстояния DAT_G (i) перемещения от местоположения ведущего транспортного средства до каждой точки».
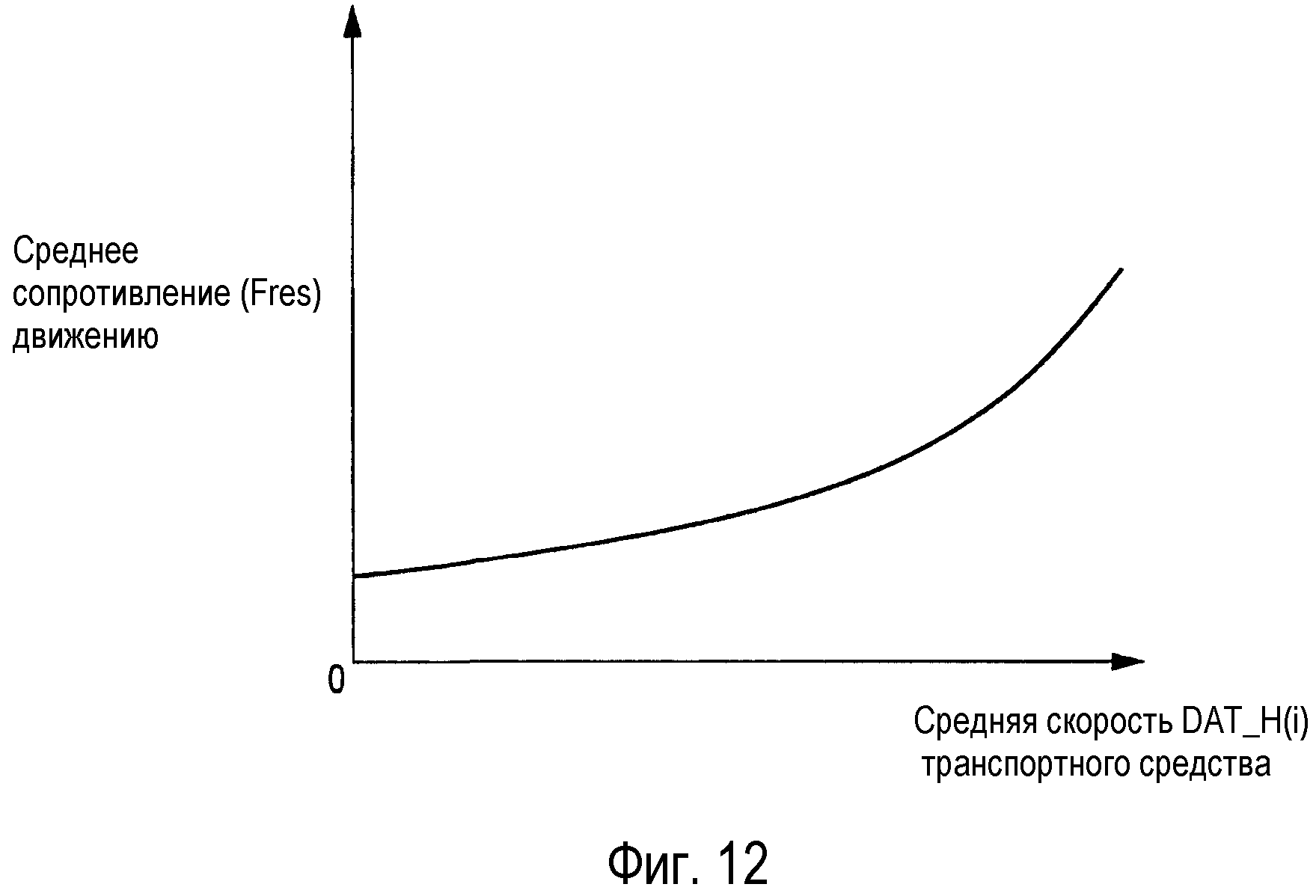
Энергию DAT_I (i) для перемещения вычисляют, исходя из массы M транспортного средства, ускорения G свободного падения, высоты DAT_C (i) над уровнем моря каждой точки, высоты HGTcur над уровнем моря местоположения ведущего транспортного средства, среднего сопротивления Fres движению и расстояния DAT_G (i) перемещения на основе следующего уравнения.

Правый член «M×G×{DAT_C (i) - HGTcur}» представляет энергию, расходуемую из-за изменения потенциальной энергии ведущего транспортного средства. Дополнительно, член «Fres×{DAT_G (i)}» представляет энергию, расходуемую на преодоление сопротивления движению.
Таким образом «энергия DAT_I (i) для перемещения от местоположения ведущего транспортного средства до каждой точки» выражается суммой энергии, расходуемой из-за изменения потенциальной энергии ведущего транспортного средства, и энергии, расходуемой на преодоление сопротивления движению.
Следует заметить, что высоту HGTcur над уровнем моря местоположения ведущего транспортного средства можно получить на основе сигнала GPS или данных карты.
Дополнительно, среднее сопротивление Fres движению определяют путем использования средней скорости транспортного средства для каждой точки DAT_H (i) на графике, показанном на фиг. 12.
В этом варианте контроллер 23 оценивает энергию DAT_I (i) перемещения на основе информации о маршруте перемещения от местоположения ведущего транспортного средства до каждой точки. При таком подходе энергия для перемещения оценивается с высокой степенью точности.
Контроллер 23 может оценить энергию DAT_I (i), используя информацию, относящуюся только к двум точкам, а именно: местоположению ведущего транспортного средства и каждой точке. Например, контроллер 23 может оценить энергию DAT_I (i) для перемещения на основе разности высот над уровнем моря и линейного расстояния между местоположением ведущего транспортного средства и каждой точки. При таком подходе снижается вычислительная нагрузка.
Вернемся к фиг. 7, где на этапе S1604 контроллер 23 выделяет из точек i (i=1, 2, 3, 4, 5, …), хранящихся в упорядоченных данных по фиг. 11, точку, имеющую малую вероятность того, что в нее переместится транспортное средство, на основе типа DAT_D (i) дороги. Затем контроллер 23 сокращает количество точек, удаляя из упорядоченных данных точки, имеющие указанную малую вероятность. Например, узкая дорога (тип 0) имеет меньший объем трафика, чем региональная дорога (тип 2). Таким образом, перемещение с меньшей вероятностью произойдет по узкой дороге. Соответственно, контроллер 23 сокращает количество точек, удаляя точки, расположенные на узких дорогах.
На этапе S1605 контроллер 23 устанавливает «расстояние Rsrch поиска дороги от местоположения ведущего транспортного средства» равным начальному значению. Затем на основе этого начального значения контроллер 23 определяет действительную область поиска дорожной информации (область управления энергией батареи) для управления энергией батареи.
На этапе S1606 контроллер 23 сокращает количество точек. В частности, контроллер 23 сокращает количество точек путем удаления тех точек, у которых «линейное расстояние DAT_F (i) от местоположения ведущего транспортного средства» больше, чем «расстояние Rsrch поиска дороги от местоположения ведущего транспортного средства», или, другими словами, сокращает точки, не укладывающиеся в расстояние Rsrch поиска дороги, из числа точек i (i=1, 2, 3, 4, 5, …), хранящихся в упорядоченных данных по фиг. 11.
На этапе S1607 контроллер 23 определяет максимальное значение Edrvmax и минимальное значение Edrvmin энергии для перемещения для сокращенного числа точек. В частности, контроллер 23 выбирает максимальное значение и минимальное значение «энергии DAT_I (i) для перемещения от местоположения ведущего транспортного средства до каждой точки» в упорядоченных данных по фиг. 11. Этап S1607 соответствует блоку выделения максимума/минимума.
На этапе S1608 контроллер 23 вычисляет верхнее предельное значение SOC и нижнее предельное значение SOC. Верхнее предельное значение SOC и нижнее предельное значение SOC представляют собой заданное верхнее предельное значение и заданное нижнее предельное значение для управления SOC батареи, так чтобы SOC батареи не оказалась избыточной либо недостаточной во время перемещения в области управления энергией батареи. Этап S1608 соответствует блоку вычисления целевых значений для управления.
В частности, контроллер 23 определяет верхнее предельное значение Ebin для управления энергией батареи и нижнее предельное значение Ebout для управления энергией батареи на основе следующего уравнения.
Затем контроллер 23 вычисляет верхнее предельное значение SOC путем преобразования верхнего предельного значения Ebin для управления энергией батареи в SOC батареи. Дополнительно контроллер 23 вычисляет нижнее предельное значение SOC путем преобразования нижнего предельного значения Ebout для управления энергией батареи в SOC батареи.
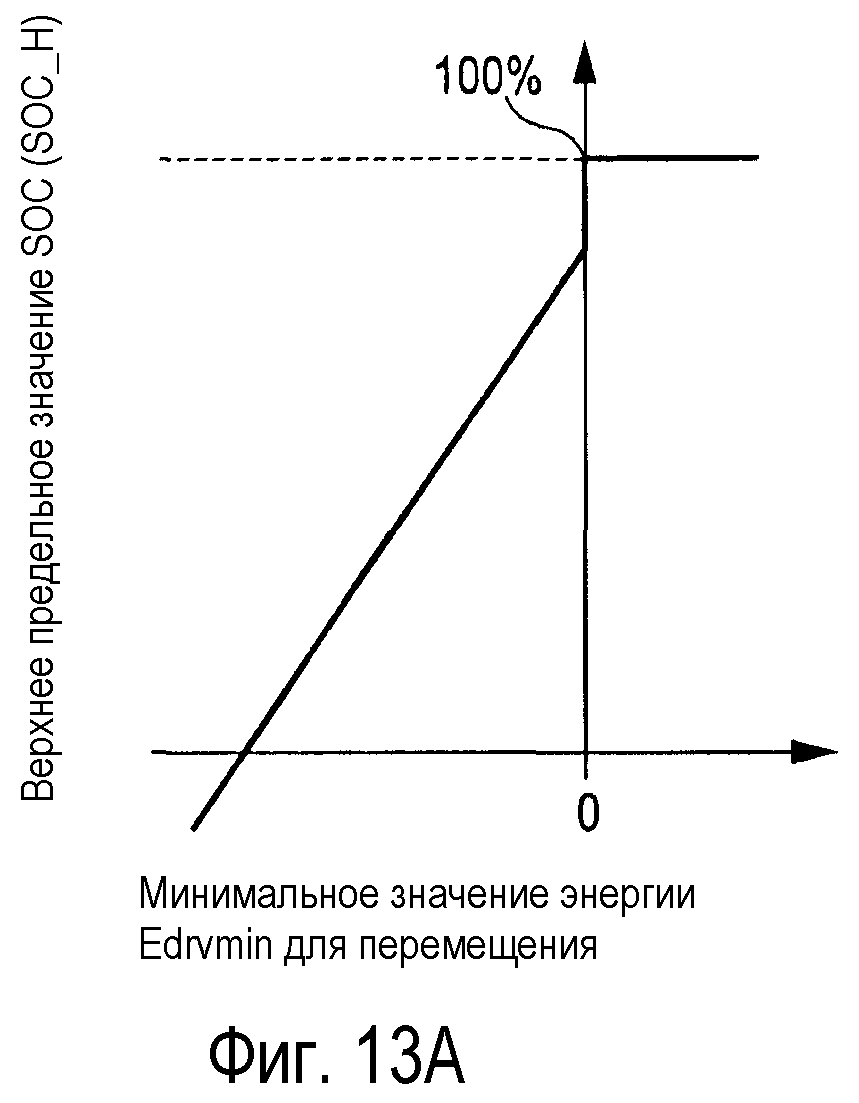
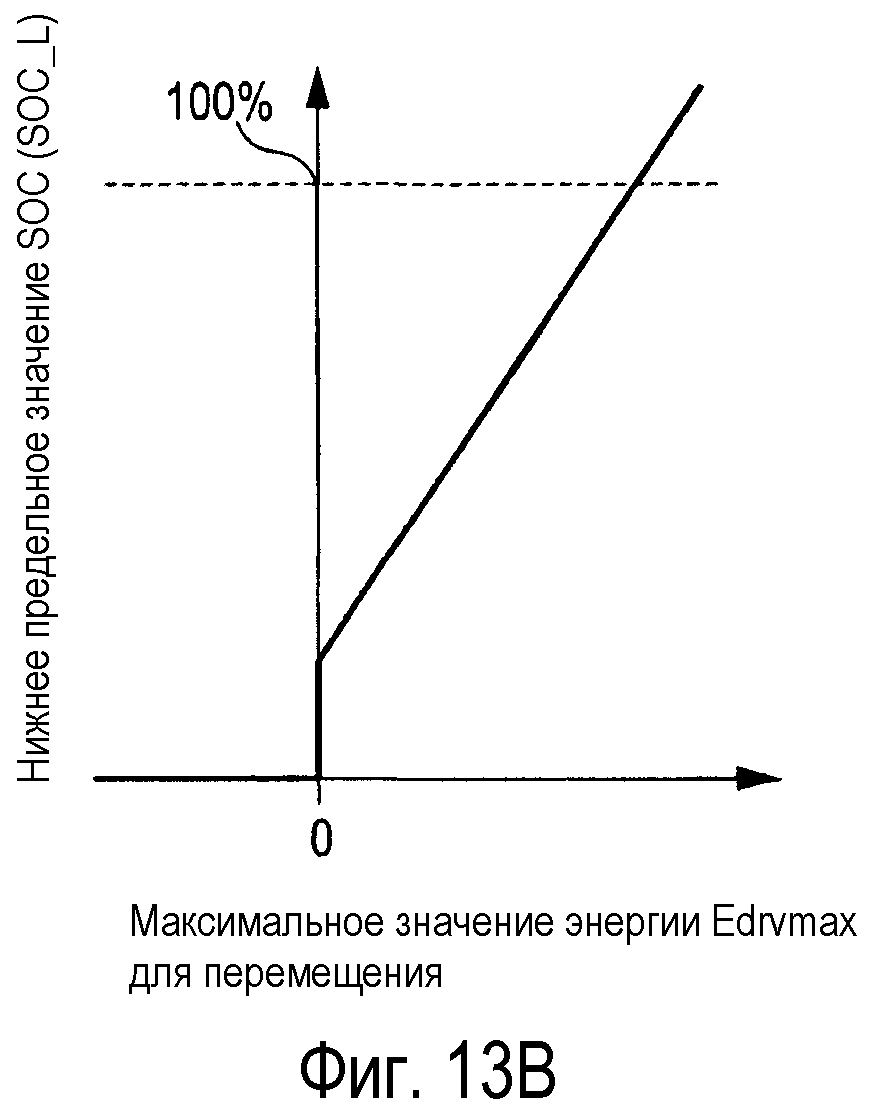
Следует заметить, что контроллер 23 может определить верхнее предельное значение SOC путем использования минимального значения Edrvmin энергии перемещения для диаграммы, показанной на фиг. 13А. Дополнительно, контроллер 23 может определить нижнее предельное значение SOC путем использования максимального значения Edrvmax энергии перемещения для диаграммы, показанной на фиг. 13В. Как видно из фиг. 13А, верхнее предельное значение SOC (верхнее предельное значение Ebin для управления энергией батареи) уменьшается с уменьшением минимальной энергии Edrvmin для перемещения (то есть, когда минимальная энергия Edrvmin для перемещения становится отрицательной). Путем использования такой диаграммы можно получить стабильно большое количество энергии рекуперации, при уменьшении минимальной энергии Edrvmin для перемещения. Как ясно из фиг. 13В, нижнее предельное значение SOC (нижнее предельное значение Ebout для управления энергией батареи) растет с увеличением максимальной энергии Edrvmax для перемещения. Используя подобным образом построенную диаграмму, можно обеспечить подачу стабильно большого количества энергии во время движения, когда максимальная энергия Edrvmax для перемещения возрастает.
Далее со ссылками на фиг. 14 описывается верхнее предельное значение SOC (верхнее предельное значение Ebin для управления энергией батареи) и нижнее предельное значение SOC (нижнее предельное значении Ebout для управления энергией батареи.
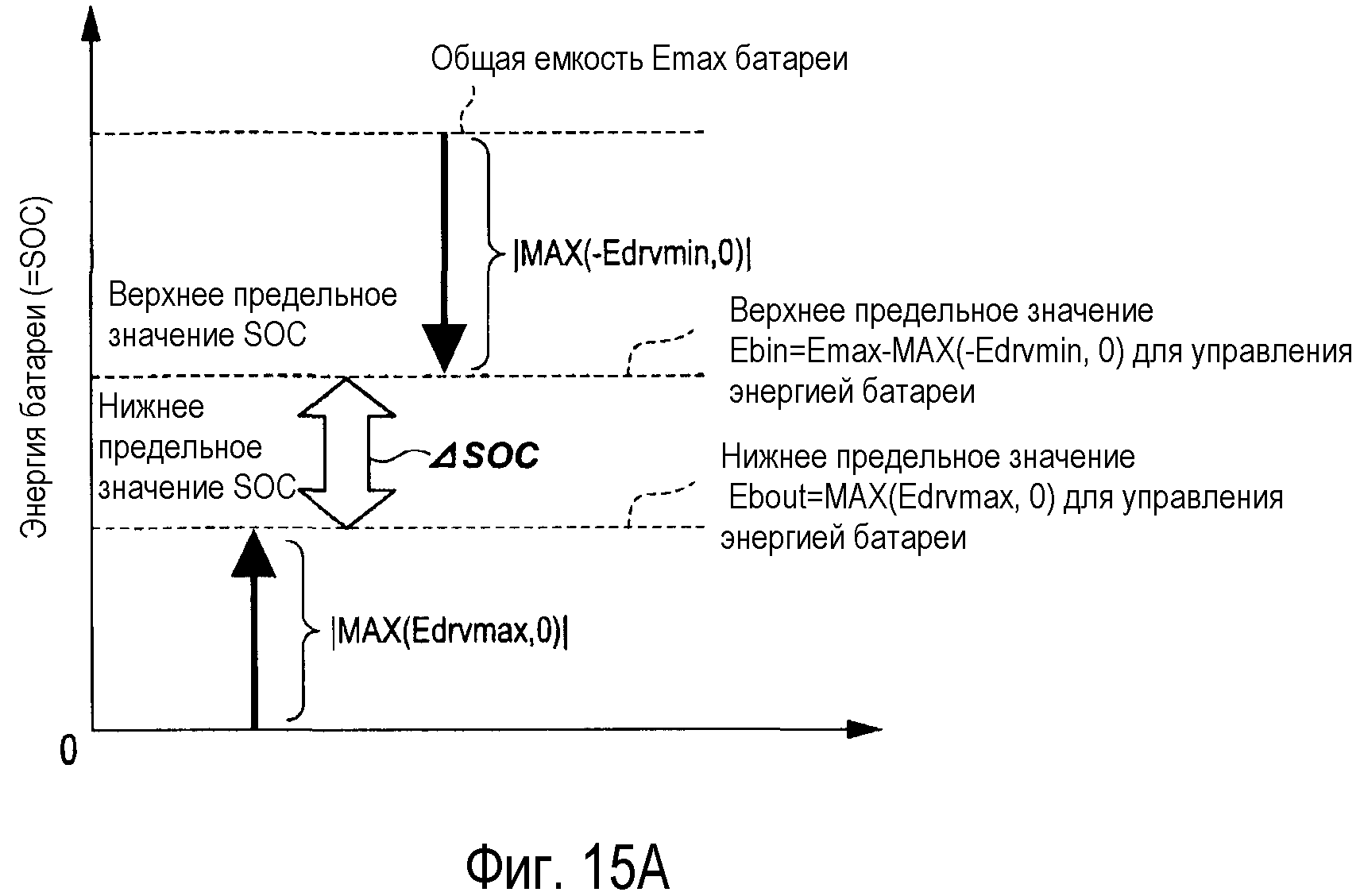
На этапе S1605 устанавливают начальное значение расстояния Rsrch для поиска дороги. Для этого момента времени область управления энергией батареи показана на фиг. 14 затененной. В области управления энергией батареи существуют проезжаемые маршруты, показанные сплошными линиями. На проезжаемых маршрутах существуют намеченные точки 1-11. На фиг. 14 энергия, необходимая для перемещения ведущего транспортного средства из точки 0 в точку 7, соответствует максимальной энергии Edrvmax для перемещения, а энергия, необходимая для перемещения из точки 0 в точку 11, соответствует минимальной энергии Edrvmin для перемещения. Верхнее предельное значение SOC (верхнее предельное значение Ebin для управления энергией батареи) и нижнее предельное значение SOC (нижнее предельное значение Ebout для управления энергией батареи) определяют на основе максимальной энергии Edrvmax для перемещения и минимальной энергии Edrvmin для перемещения, как показано на фиг. 15А.
Затем контроллер 25 осуществляет управление зарядкой батареи посредством выработки электроэнергии, как показано на фиг. 3, для поддержания действительного значения SOC в пределах интервала ΔSOC для управления энергией батареи между верхним предельным значением SOC и нижним предельным значением SOC. Остаточная энергия батареи после перемещения к точке 7 с максимальным расходом энергии и к точке 11 с минимальным расходом энергии надежно служит в качестве целевого значения соответствующих точек. Таким образом, когда автомобиль перемещается через область управления энергией батареи на фиг. 14, избытка либо дефицита энергии батареи не возникает.
Точка 7 с максимальной энергией для перемещения расположена на перевале горы. После съезда с перевала автомобиль непрерывно перемещается по склону вниз, и, следовательно, может быть обеспечено аккумулирование большого количества энергии в батарее. Таким образом, предпочтительно, чтобы остаточная энергия батареи в точке 7 с максимальной энергией для перемещения была как можно меньше. При низкой остаточной энергии батареи может быть обеспечен большой заряд энергии на склоне. Соответственно, предпочтительно, чтобы заданное значение остаточной энергии батареи в точке 7 с максимальной энергией для перемещения было как можно ниже.
Точка 11 с минимальной энергией для перемещения находится на дне долины. После выезда со дна долины автомобиль непрерывно перемещается вверх, для чего требуется большое количество энергии батареи. Таким образом, предпочтительно, чтобы в точке 11 с минимальной энергией для перемещения остаточная энергия батареи была как можно выше. Когда остаточная энергия батареи высока, может подаваться большое количество энергии батареи при движении по склону вверх. Соответственно, предпочтительно, чтобы заданное значение остаточной энергии батареи в точке 11 с минимальной энергией для перемещения было как можно выше.
Таким образом, остаточную энергию батареи уменьшают насколько это возможно, перед движением по склону вниз, и тогда при движении транспортного средства вниз эффективность накопления энергии повышается, что приводит к повышению экономии топлива.
Дополнительно, остаточную энергию батареи увеличивают, насколько это возможно, перед движением по склону вверх, и тогда не возникает дефицит энергии батареи даже при движении транспортного средства вверх.
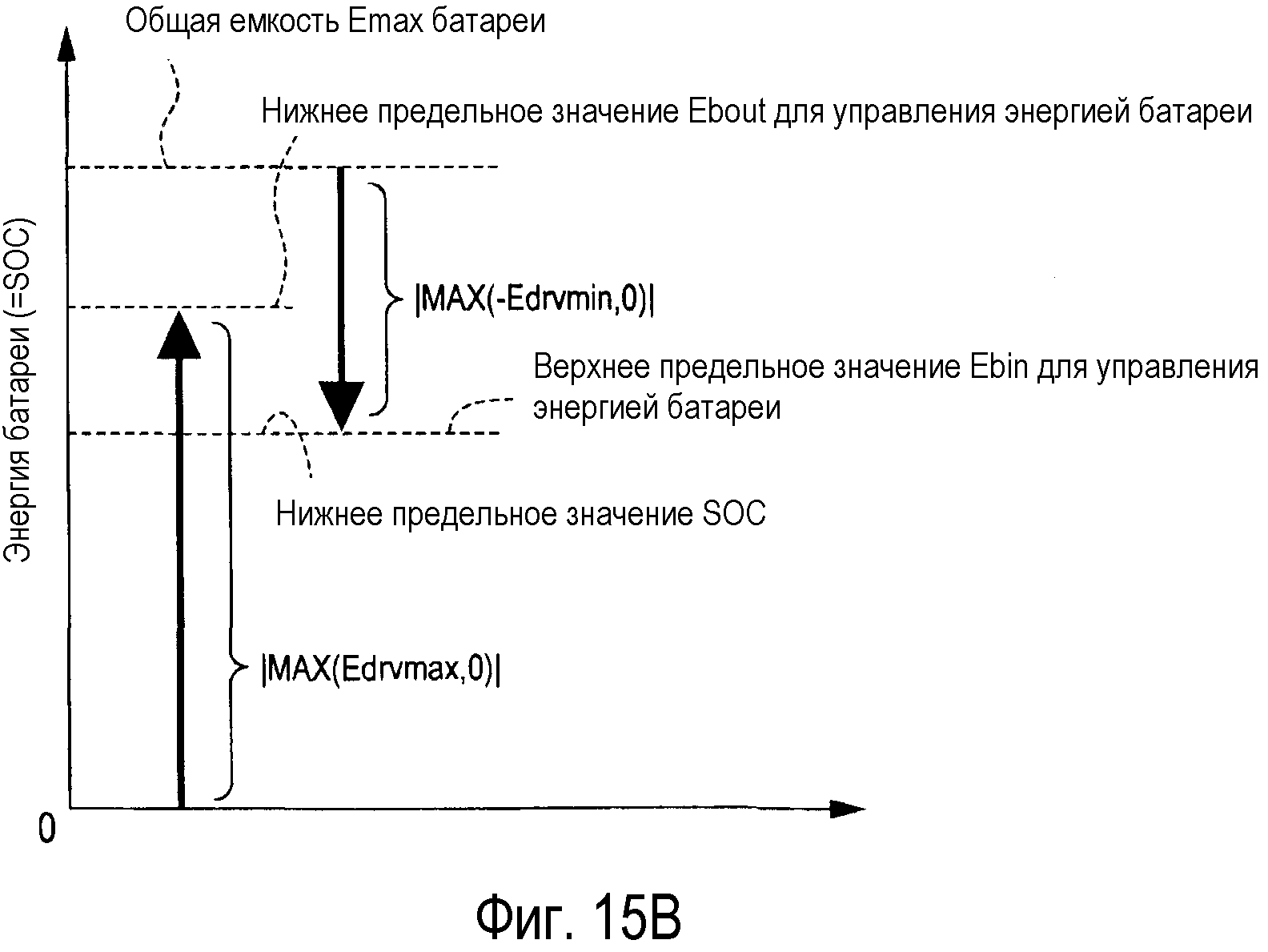
Однако, когда максимальная энергия Edrvmax для перемещения чрезмерно велика, нижнее предельное значение (Ebout=MAX(Edrvmax, 0)) для управления энергией батареи также становится излишне большим. В результате правильное соотношение величин, показанное на фиг. 15А, может измениться на противоположное, так что нижнее предельное значение Ebout для управления энергией батареи превысит верхнее предельное значение Ebin для управления энергией батареи, что приведет к состоянию, показанному на фиг. 15В.
Дополнительно, когда энергия рекуперации слишком велика, а минимальная энергия Edrvmin для перемещения слишком мала, верхнее предельное значение (Ebin=Emax-MAX (-Edrvmin, 0)) для управления энергией батареи становится слишком малым. Другими словами, правильное соотношение величин, показанное на фиг. 15А, может измениться на противоположное, так что нижнее предельное значение Ebout для управления энергией батареи превысит верхнее предельное значение Ebin для управления энергией батареи, что приведет к состоянию, показанному на фиг. 15В.
Такое изменение соотношения величин на обратное между верхним предельным значением Ebin для управления энергией батареи и нижним предельным значением Ebout для управления энергией батареи вызывается корреляцией между тремя величинами, а именно, максимальной энергией Edrvmax для перемещения, минимальной энергией Edrvmin для перемещения и общей емкостью Emax батареи.
В состоянии, в котором соотношение между верхним предельным значением Ebin для управления энергией батареи (верхнее предельное значение SOC) и нижним предельным значением Ebout для управления энергией батареи (нижнее предельное значение SOC) изменяется на противоположное, управление зарядкой батареи посредством генерирования электроэнергии по фиг. 3 не выполняется. Дополнительно, управление зарядкой батареи, обеспечивающее отсутствие избыточности и дефицита энергии батареи, не выполняется в области управления энергией батареи, показанной на фиг. 14. Дополнительно, не выполняется управление зарядкой, обеспечивающее остаточную энергию батареи на как можно более низком уровне перед движением по склону вниз. Также не выполняется управление зарядкой, обеспечивающее остаточную энергию батареи на как можно более высоком уровне перед движением по склону вверх.
Если управление зарядкой, обеспечивающее остаточную энергию батареи на как можно более низком уровне перед движением по склону вниз, не выполняется, батарея заряжается энергией, получаемой при движении по склону вниз, причем полная зарядка обеспечивается в средней точке пути по склону вниз. В результате расходуется энергия рекуперации, что повышает экономию топлива.
Дополнительно, когда управление зарядкой, обеспечивающее остаточную энергию батареи на как можно более высоком уровне перед движением по склону вверх, не выполняется, возможно возникновение дефицита энергии батареи в средней точке пути по склону вверх.
Задачей данного варианта является исключение вышеописанных проблем, то есть, исключение того, чтобы соотношение между верхним предельным значением Ebin для управления энергией батареи (верхнее предельное значение SOC) и нижним предельным значением Ebout для управления энергией батареи (нижнее предельное значение SOC) не изменилось на противоположное.
Таким образом, на этапе S1609 контроллер 23 определяет интервал ΔSOC для управления энергией батареи путем вычитания нижнего предельного значения SOC (SOC_L) из верхнего предельного значения SOC (SOC_H). Другими словами, интервал ΔSOC для управления энергией батареи выражается следующим уравнением. Этап S1609 соответствует блоку вычисления интервала для управления энергией батареи.
ΔSOC=SOC_H-SOC_L
Затем контроллер 23 определяет, превышает ли интервал ΔSOC для управления энергией батареи заранее определенное положительное значение, показанное на фиг. 15А. Здесь, как показано на фиг. 15А, заранее определенное положительное значение является контрольным значением для определения того, что верхнее предельное значение SOC больше нижнего предельного значения SOC. Другими словами, как показано на фиг. 15В, это заранее определенное положительное значение является контрольным значением для определения того, что верхнее предельное значение SOC не опустилось ниже нижнего предельного значения SOC.
Если интервал ΔSOC для управления энергией батареи меньше упомянутого заранее определенного положительного значения, это указывает на то, что верхнее предельное значение SOC меньше нижнего предельного значения SOC, и, следовательно, может возникнуть проблема при управлении.
Таким образом, после определения на этапе S1609 того, что интервал ΔSOC для управления энергией батареи меньше заранее определенного положительного значения, контроллер 23 переходит к обработке на этапе S1610, а затем возвращается к этапу S1606.
На этапе S1610 контроллер 23 устанавливает новое расстояние Rsrch поиска дороги. На фиг. 7 контроллер 23 устанавливает новое расстояние Rsrch поиска дороги путем вычитания заранее определенного расстояния ΔRsrch из установленного текущего расстояния Rsrch поиска дороги.
Следует заметить, что точное управление зарядкой батареи не может быть реализовано также в том случае, когда интервал ΔSOC для управления энергией батареи слишком велик, и тогда можно обеспечить лишь грубое управление энергией батареи. Следовательно, когда интервал ΔSOC для управления энергией батареи слишком велик, интервал ΔSOC для управления энергией батареи можно сузить путем перехода к обработке с этапа S1609 на этап S1610, установив новое расстояние Rsrch поиска дороги и повторно вычислив верхнее предельное значение SOC и нижнее предельное значение SOC. Этап S1610 соответствует блоку изменения области управления.
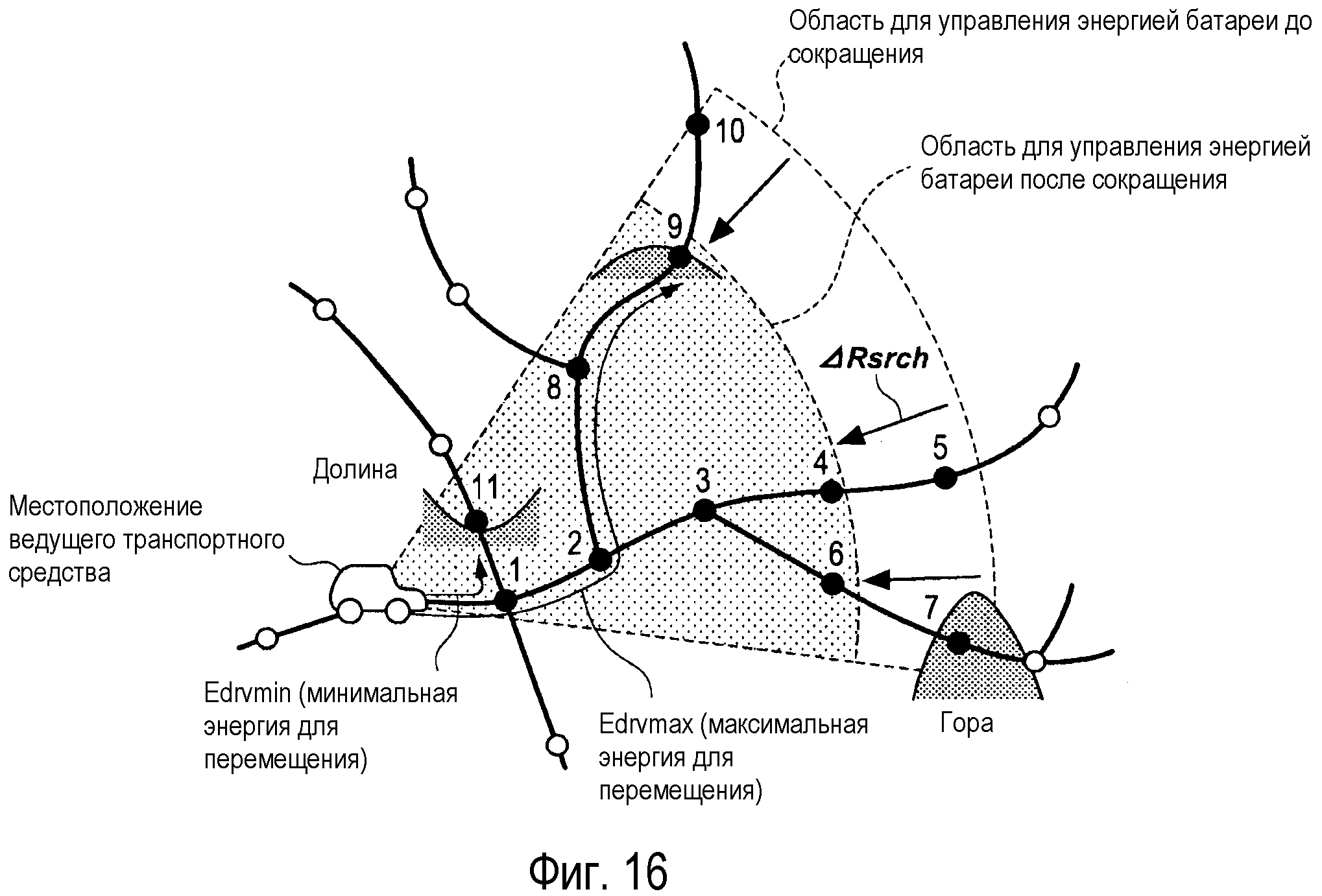
Затем управление возвращается из этапа S1610 к этапу S1606. На этапе S1606 выполняется переустановка области для управления энергией батареи на основе нового расстояния Rsrch поиска дороги. В результате область для управления энергией батареи сужается, как показано на фиг. 16. На этапе S1607 заново определяют максимальную энергию Edrvmax для перемещения и минимальную энергию Edrvmin для перемещения. На фиг. 14 энергия, необходимая для перемещения транспортного средства из точки 0 в точку 7, соответствует максимальной энергии Edrvmax для перемещения, в то время как на фиг. 16 Edrvmax для перемещения соответствует энергии, необходимой для перемещения транспортного средства из точки 0 в точку 9. Таким образом, максимальная энергия Edrvmax для перемещения уменьшается. Соответственно, нижнее предельное значение SOC, вычисленное на этапе S1608, становится ниже верхнего предельного значения SOC.
Затем контроллер 23 переходит с этапа S1609 к обработке на этапе S1611.
На этапе S1611 контроллер определяет, находится ли внешняя зарядная база (бытовой источник 7 питания или зарядная установка 8) в области для управления энергией батареи. Этап 1611 соответствует блоку определения внешней зарядной базы.
Если внешняя зарядная база не находится в области для управления энергией батареи, то контроллер 23 возвращается к управлению на этапе S17 по фиг. 6. Когда внешняя зарядная база находится в области для управления энергией батареи, то контроллер 23 переходит к управлению на этапе S1612.
На этапе S1612 контроллер 23 устанавливает «линейное расстояние DAT_F(i) от местоположения ведущего транспортного средства до внешней зарядной базы» в качестве «расстояния Rsrch поиска дороги от местоположения ведущего транспортного средства». Затем контроллер 23 переустанавливает область для управления энергией батареи, уменьшая ее размеры. Этап S1612 соответствует блоку уменьшения области для управления энергией батареи.
На этапе S1613 контроллер 23 удаляет точки из числа точек i (i=1, 2, 3, …), хранящихся в упорядоченных данных по фиг. 11, для которых «линейное расстояние DAT_F(i) от местоположения ведущего транспортного средства» превышает расстояние Rsrch поиска дороги, установленное на этапе S1612, или, другими словами, удаляет из упорядоченных данных точки, расстояние до которых превышает линейное расстояние до внешней зарядной базы.
На этапе S1614 контроллер 23 выполняет поиск «энергии DAT_I(i) перемещения от местоположения ведущего транспортного средства до каждой точки» в упорядоченных данных по фиг. 11 и выделяет максимальное значение Edrvmax и минимальное значение Edrvmin энергии перемещения.
На этапе S1615 контроллер 23 вычисляет верхнее предельное значение SOC и нижнее предельное значение SOC на основе максимальной энергии Edrvmax перемещения и минимальной энергии Edrvmin перемещения.
В частности, контроллер 23 определяет верхнее предельное значение Ebin для управления энергией батареи и нижнее предельное значение Ebout для управления энергией батареи на основе следующего уравнения.
Ebin=Emax-MAX(-Edrvmin, 0)
Ebout=MAX(Edrvmax, 0)
Затем контроллер 23 вычисляет верхнее предельное значение SOC путем преобразования верхнего предельного значения Ebin для управления энергией батареи в SOC батареи. Дополнительно, контроллер 23 вычисляет нижнее предельное значение SOC путем преобразования нижнего предельного значения Ebout для управления энергией батареи в SOC батареи.
На этапе S1616 контроллер 23 вычисляет новое верхнее предельное значение SOC_H, исходя из нижнего предельного значения SOC_L на основе графика, показанного на фиг. 17. Как очевидно следует из фиг. 17, новое верхнее предельное значение SOC_H больше нижнего предельного значения SOC_L согласно заранее установленному соотношению. Этап S1616 соответствует блоку изменения верхнего предельного значения для управления. После вычисления нового верхнего предельного значения SOC_H контроллер 23 возвращается к управлению на этапе S17 по фиг. 6.
Действия и эффекты
Как было описано выше, при управлении генерированием электроэнергии с помощью двигателя по фиг. 3 управление выполняется так, чтобы SOC (остаточная энергия батареи) была меньше верхнего предельного значения SOC (верхнее предельное значение для управления энергией батареи) и больше нижнего предельного значения SOC (нижнее предельное значение для управления энергией батареи).
Верхнее предельное значение SOC (верхнее предельное значение для управления энергией батареи) и нижнее предельное значение SOC (нижнее предельное значение SOC для управления энергией батареи) устанавливаются согласно управлению по фиг. 7, в результате чего обеспечиваются следующие действия и эффекты.
На этапах S1606, S1607 и S1608 по фиг. 7 контроллер 23 выделяет максимальное значение Edrvmax и минимальное значение Edrvmin энергии для перемещения, необходимой для достижения намеченных точек (точки 1-11 на фиг. 14) по меньшей мере по одному проезжаемому маршруту в некоторой области (область для управления энергией батареи, в которой существует высокая вероятность передвижения), проходящей перед местоположением ведущего транспортного средства и ограниченной расстоянием Rsrch поиска дороги. Затем контроллер 23 вычисляет верхнее предельное значение SOC и нижнее предельное значение SOC, чтобы обеспечить отсутствие избытка и дефицита энергии батареи при перемещении в указанной области для управления энергией батареи. Затем, после определения на основе интервала ΔSOC для управления энергией батареи того, что соотношение между верхним предельным значением SOC и нижним предельным значением SOC не изменится с правильного соотношения, показанного на фиг. 15А, на обратное (этап S1609) и определения того, что внешняя зарядная база (бытовой источник 7 питания или зарядная установка 8) в назначенной точке не существует (этап S1611), контроллер 23 передает верхнее предельное значение SOC и нижнее предельное значение SOC, как они есть (этап S17).
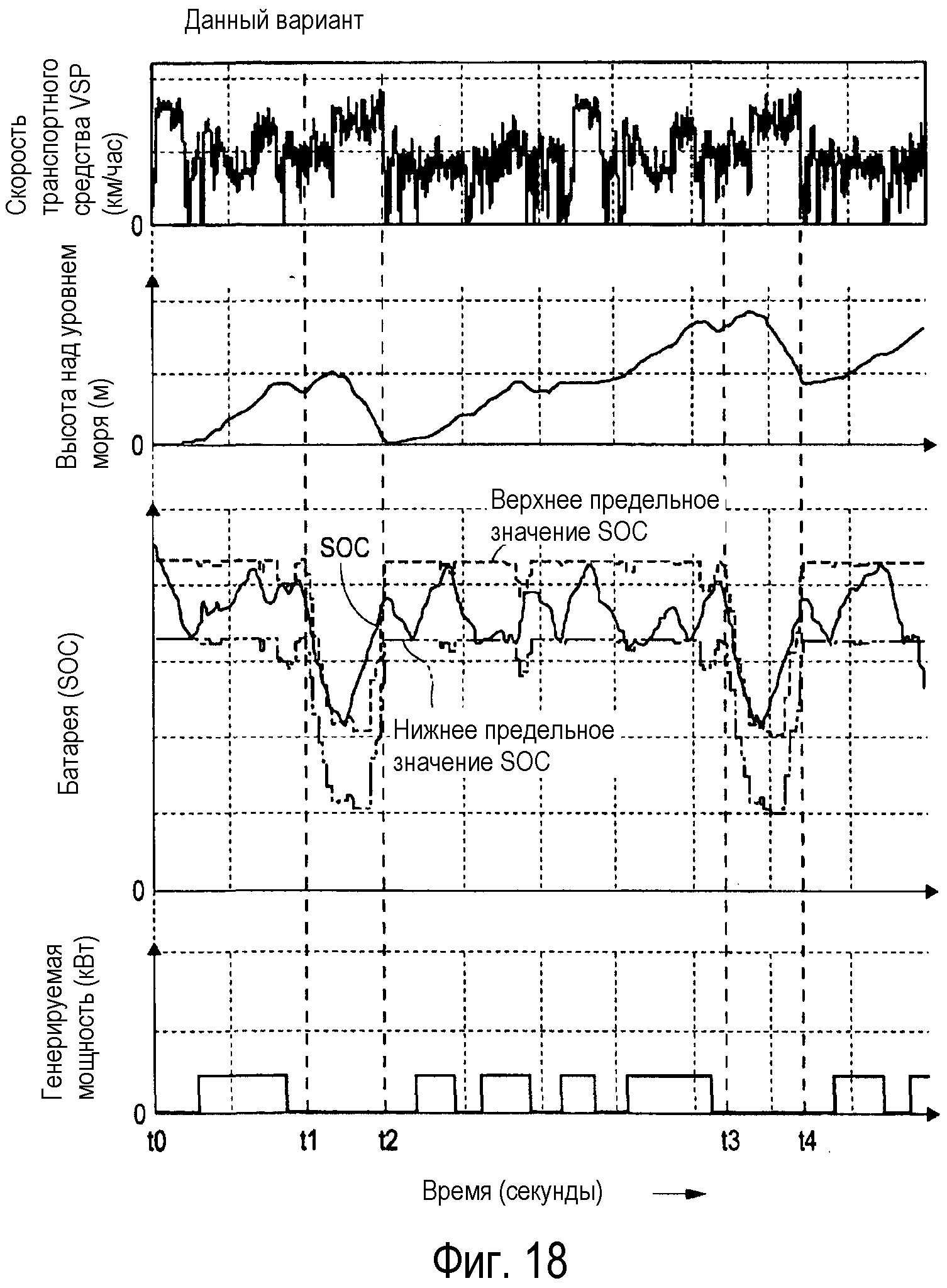
В этом варианте верхнее предельное значение SOC и нижнее предельное значение SOC изменяют во время перемещения в области для управления энергией батареи. Далее со ссылками на фиг. 18 описывается конкретное содержание этой обработки для случая, когда изменяется высота над уровнем моря. В моменты t0, t2, t4, когда высота над уровнем моря начинает возрастать, верхнее предельное значение SOC и нижнее предельное значение SOC увеличиваются, чтобы увеличить SOC батареи при подготовке для движения по склону вверх. В моменты t1, t3, когда высота над уровнем моря начинает снижаться, верхнее предельное значение SOC и нижнее предельное значение SOC уменьшается, чтобы снизить SOC батареи при подготовке для движения по склону вниз.
На фиг. 19, где показан сравнительный вариант, верхнее предельное значение SOC и нижнее предельное значение SOC принимают фиксированные значения. В этом случае SOC батареи уменьшается, начиная с моментов t0, t2, t4, где высота над уровнем моря начинает непрерывно расти. Дополнительно, SOC батареи увеличивается, начиная с моментов времени t1, t3, с которых высота над уровнем моря начинает непрерывно уменьшаться. В моменты t2, t4 достигается состояние полной зарядки, и, следовательно, невозможно получение энергии посредством рекуперативного торможения. В результате снижается эффективность аккумулирования энергии.
С другой стороны, согласно этому варианту верхнее предельное значение SOC и нижнее предельное значение SOC увеличиваются в моменты t0, t2, t4, когда высота над уровнем моря начинает расти, как было описано выше, и, следовательно, SOC батареи, регулирование значения которой осуществляется в диапазоне между верхним предельным значением SOC и нижним предельным значением SOC, также увеличивается, что повышает эффективность использования энергии при перемещении вверх.
Дополнительно, верхнее предельное значение SOC и нижнее предельное значение SOC уменьшаются в моменты t1, t3, когда начинает уменьшаться высота над уровнем моря, и, следовательно, SOC батареи, значение которой регулируется в диапазоне между верхним предельным значением SOC и нижним предельным значением SOC, также уменьшается, что повышает эффективность аккумулирования энергии во время рекуперативного торможения при движении вниз.
Однако для обеспечения действий и эффектов, описанных ниже, соотношение между верхним предельным значением SOC и нижним предельным значением SOC должно соответствовать правильному соотношению, показанному на фиг. 15А. Другими словами, верхнее предельное значение SOC должно быть больше, чем нижнее предельное значение SOC. Когда указанное соотношение этих величин меняется на противоположное по отношению к правильному соотношению, вышеописанные действия и эффекты не будут получены.
Таким образом, в данном варианте, когда соотношение между верхним предельным значением SOC и нижним предельным значением SOC меняется на противоположное по отношению к правильному соотношению, область для управления энергией батареи сокращается на величину ΔRsrch, после чего верхнее предельное значение SOC и нижнее предельное значение SOC определяют заново.
Благодаря такому способу определения заново верхнего предельного значения SOC и нижнего предельного значения SOC соотношение между верхним предельным значением SOC и нижним предельным значением SOC стабильно соответствует правильному соотношению этих величин, показанному на фиг. 15А.
Затем выполняется управление выработкой электроэнергии с помощью двигателя (смотри фиг. 3) с использованием верхнего предельного значения SOC и нижнего предельного значения SOC, находящихся в правильном соотношении.
Далее описываются фигуры 14-16.
Когда соотношение между верхним предельным значением SOC и нижним предельным значением SOC, определенное на этапе S1608, меняется на противоположное по отношению к правильному соотношению этих величин, показанному на фиг. 15А, так что возникает состояние, показанное на фиг. 15В, это состояние определяется на этапе S1609, после чего область для управления энергией батареи сокращается на этапе S1610 на величину ΔRsrch, как показано на фиг. 16.
Как показано на фиг. 14, перед сокращением указанной области энергия, необходимая для перемещения ведущего транспортного средства из точки 0 в точку 7, соответствует максимальной энергии Edrvmax перемещения.
Как показано на фиг. 16, после сокращения упомянутой области энергия, необходимая для перемещения ведущего транспортного средства из точки 0 в точку 9, соответствует максимальной энергии Edrvmax перемещения.
Таким образом, максимальная энергия Edrvmax перемещения уменьшается, и на основе области для управления энергией батареи (сокращенная максимальная энергия Edrvmax перемещения) после сокращения по фиг. 16, нижнее предельное значение SOC определяют заново с меньшим значением. В результате соотношение между верхним предельным значением SOC и нижним предельным значением SOC соответствует правильному соотношению для этих величин.
Благодаря надежному обеспечению указанным образом правильного соотношения между верхним предельным значением SOC и нижним предельным значением SOC, показанному на фиг. 15А, гарантируются действия и эффекты, описанные со ссылками на фиг. 18.
В частности, обеспечивается управление зарядкой для уменьшения SOC батареи (остаточной энергии батареи) насколько это возможно, перед движением по спуску вниз. Когда батарея переходит в полностью заряженное состояние благодаря рекуперативному торможению (энергии рекуперации) во время перемещения вниз, после этого зарядка (аккумулирование энергии рекуперации) не выполняется. В результате энергия рекуперации расходуется попусту, что снижает экономию топлива. В данном варианте такого типа ситуацию удается избежать.
Дополнительно, обеспечивается управление зарядкой для увеличения SOC батареи (остаточной энергии батареи) насколько это возможно перед движением по склону вверх. В результате удается избежать ситуации, при которой возникает дефицит энергии батареи при движении по склону вверх, что снижает эффективность перемещения.
Следует заметить, что в данном варианте был описан случай, когда максимальная энергия перемещения уменьшается путем уменьшения области для управления энергией батареи, чтобы переключиться в точку, где энергия перемещения достигает своего максимума. Однако минимальная энергия для перемещения может быть увеличена путем переключения в точку, где энергия для перемещения достигает своего минимума. При таком подходе верхнее предельное значение SOC увеличивается, и в результате обеспечивается правильное соотношение между верхним предельным значением SOC и нижним предельным значением SOC.
Дополнительно, когда разность между верхним предельным значением SOC и нижним предельным значением SOC слишком велика, даже если при этом соотношение между верхним предельным значением SOC и нижним предельным значением SOC не изменилось на обратное, область для управления энергией батареи расширяется, и в результате разность между верхним предельным значением SOC и нижним предельным значением SOC входит в заранее определенный диапазон.
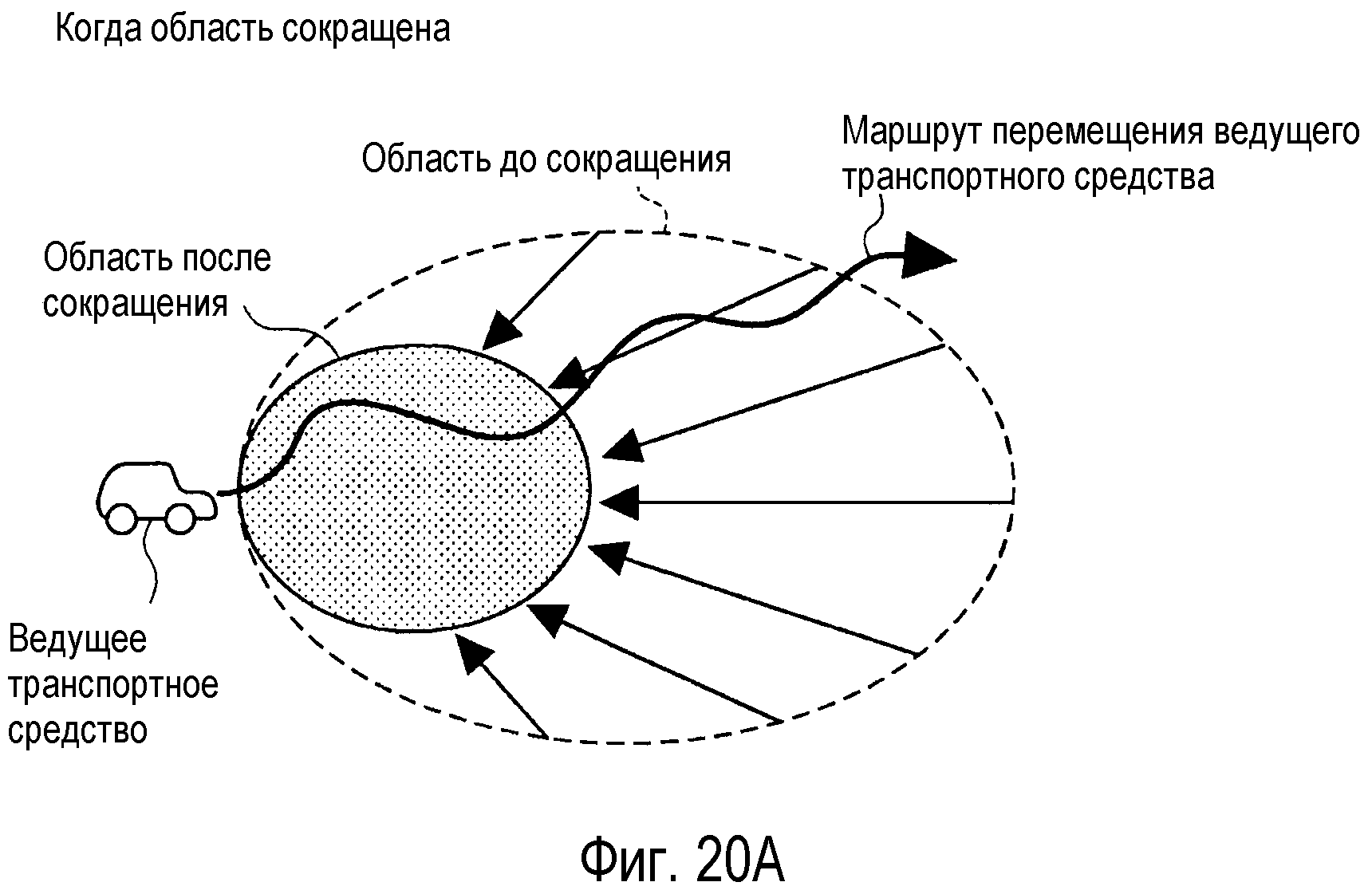
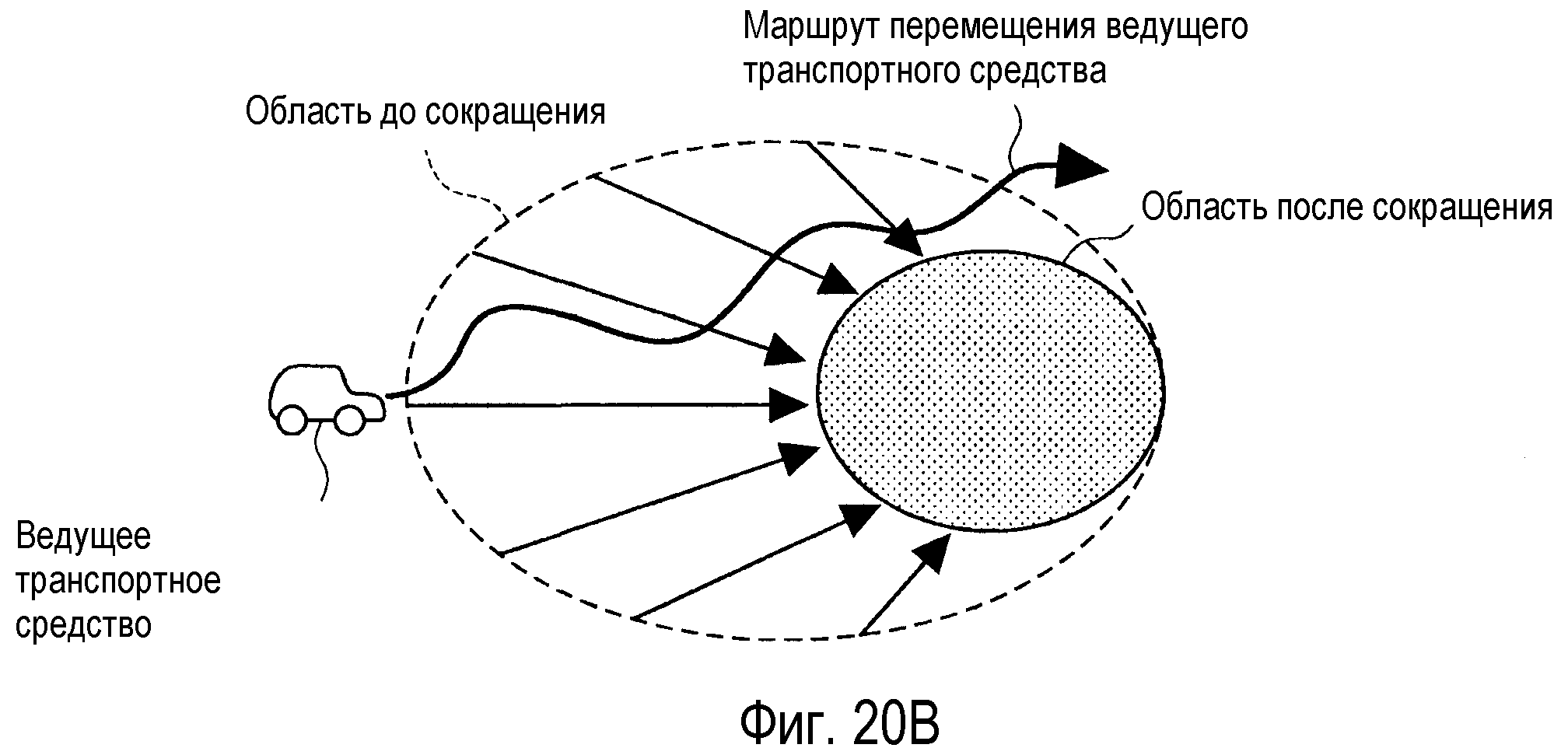
Согласно этому варианту, когда область для управления энергией батареи сужается, область в окрестности ведущего транспортного средства сохраняется, в то время как область, удаленная от ведущего транспортного средства, исключается, как показано на фиг. 20А. При расширении области для управления энергией батареи область, удаленная от ведущего транспортного средства, включается в область для управления энергией батареи вместе с областью в окрестности ведущего транспортного средства, как показано на фиг. 21А.
Когда область для управления энергией батареи изменяют для включения в нее района, удаленного от ведущего транспортного средства, может оказаться так, что измененная область для управления энергией батареи не будет включать в себя маршрут перемещения ведущего транспортного средства, как показано на фигурах 20В и 21В. В этом случае вышеописанное управление не выполняется.
Как было описано выше, в данном варианте область для управления энергией батареи сокращается или увеличивается таким образом, чтобы включать в нее область в окрестности ведущего транспортного средства. Таким образом, ведущее транспортное средство перемещается в измененной области, и в результате обеспечиваются вышеописанные действия и эффекты еще более надежным образом.
Как правило, экономия топлива транспортного средства HEV изменяется в зависимости от условий перемещения по маршруту, таких как изменение скорости транспортного средства, режим рекуперации энергии при замедлении и расстояние перемещения.
В данном варианте «энергия DAT_I (i) перемещения от местоположения ведущего транспортного средства до каждой точки» вычисляется на этапе S1603 по фиг. 7 с использованием массы M транспортного средства, ускорения G свободного падения, высоты DAT_C(i) над уровнем моря каждой точки, высоты HGTcur над уровнем моря местоположения ведущего транспортного средства, среднего сопротивления Fres движению и расстояния DAT_G(i).
Оценив подобным образом энергию DAT_I (i) перемещения на основе информации о маршруте перемещения от местоположения ведущего транспортного средства до каждой точки, можно будет оценить энергию DAT_I (i) перемещения с высокой степенью точности, в результате чего вышеописанные действия и эффекты обеспечиваются еще более надежным образом.
Если в намеченной точке в области для управления энергией батареи существует внешняя зарядная база (бытовой источник 7 питания или зарядная установка 8) (этап 1611), то выполняется переустановка области для управления энергией батареи (этап S1612), и исключается область, находящаяся дальше линейного расстояния до внешней зарядной базы (шаг S1613).
На этапе S1614 выделяют максимальное значение Edrvmax и минимальное значение Edrvmin энергии для перемещения до точки во вновь установленной области. На этапе S1615 вычисляют верхнее предельное значение SOC на основе минимальной энергии Edrvmin для перемещения и вычисляют нижнее предельное значение SOC на основе максимальной энергии Edrvmax для перемещения. На этапе S1616 вычисляют новое верхнее предельное значение SOC, превышающее нижнее предельное значение SOC согласно заранее установленному соотношению (смотри фиг. 17).
Новое верхнее предельное значение SOC используют вместе с нижним предельным значением SOC, вычисленным на этапе S1615, во время управления генерированием электроэнергии с помощью двигателя (см. фиг. 3).
В результате обеспечиваются следующие действия и эффекты.
На фиг. 22 представлена ситуация, когда ведущее транспортное средство проходит через точку 0.
В месте нахождения ведущего транспортного средства на фиг. 22 в области для управления энергией батареи внешняя зарядная база не существует. Верхнее предельное значение SOC и нижнее предельное значение SOC определяют на этапе S1608 по фиг. 7. Верхнее предельное значение SOC и нижнее предельное значение SOC показаны к моменту t1 на фиг. 24. Затем выполняется управление генерированием электроэнергии с помощью двигателя, так чтобы SOC батареи было ниже верхнего предельного значения SOC и выше нижнего предельного значения SOC.
Когда ведущее транспортное средство достигает местоположения, показанного на фиг. 23, в области для управления энергией батареи существует внешняя зарядная база. В данном варианте область для управления энергией батареи переустанавливают таким образом, чтобы в нее была включена область (заштрихованная диагональными линиями на фиг. 23), отстоящая дальше от местоположения ведущего транспортного средства, чем линейное расстояние до внешней зарядной базы. Затем на основе максимальной энергии Edrvmax для перемещения в точку в переустановленной области устанавливают нижнее предельное значение SOC. Затем устанавливают верхнее предельное значение SOC, превышающее нижнее предельное значение SOC согласно заранее установленному соотношению (смотри фиг. 17). Верхнее предельное значение SOC и нижнее предельное значение SOC, установленные указанным образом, используют в процессе управления выработкой электроэнергии с помощью двигателя (фиг. 3).
Если верхнее предельное значение SOC не установить таким образом, то максимальная энергия Edrvmax и минимальная энергия Edrvmin постепенно уменьшаются до 0, когда ведущее транспортное средство достигает внешней зарядной базы, и область для управления энергией батареи сужается. Затем верхнее предельное значение SOC постепенно увеличивается, начиная с момента t1 на фиг. 24, как показано пунктирной линией. В этом случае разность между верхним предельным значением SOC и нижним предельным значением SOC увеличивается, или, другими словами, увеличивается интервал ΔSOC для управления энергией батареи. В результате не может быть обеспечено оптимальное управление выработкой электроэнергии с помощью двигателя.
Однако в этом варианте верхнее предельное значение SOC устанавливают большим, чем нижнее предельное значение SOC согласно заранее установленному соотношению, и, следовательно, интервал ΔSOC для управления энергией батареи остается подходящим даже в том случае, когда в области для управления энергией батареи существует внешняя зарядная база. Таким образом, обеспечивается оптимальное управление генерированием электроэнергии с помощью двигателя.
Хотя настоящее изобретение было описано со ссылками на некоторые варианты его осуществления, изобретение не ограничивается вышеописанными вариантами. Специалисты в данной области техники без труда предложат различные модификации и версии вышеописанных вариантов, не выходя за рамки объема формулы изобретения.
Например, при существовании подъема дороги непосредственно перед внешней зарядной базой, верхнее предельное значение SOC и нижнее предельное значение SOC могут быть временно увеличены при подготовке к движению по склону вверх.
Благодаря временному увеличению верхнего предельного значения SOC и нижнего предельного значения SOC перед подъемом, находящимся непосредственно перед внешней зарядной базой, SOC батареи временно увеличивают перед этим подъемом. Следовательно, остаточную энергию батареи можно надежно уменьшить перед прибытием ведущего транспортного средства на внешнюю зарядную базу, в результате чего на внешней зарядной базе можно обеспечить зарядку с аккумулированием большего количества энергии, что является экономически эффективным и положительно влияет на окружающую среду.
Содержание патентной заявки Японии №2009-127110 с датой подачи в Японии 27 мая 2009 года включено сюда по ссылке.
Варианты настоящего изобретения, на которые заявлена исключительная собственность или привилегия, определены нижеследующей формулой изобретения.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

