Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ В ПРОСТРАНСТВЕ ГИРОПРИБОРА ПРИ ЕГО ИСПЫТАНИЯХ
Вид РИД
Изобретение
Изобретение относится к области приборостроения и предназначено для ортогонального позиционирования испытываемого гироприбора в пространстве относительно плоскости горизонта и плоскости меридиана.
Целью настоящего изобретения является определение необходимых условий, определяющих положения гироприбора в пространстве при его испытаниях, а также создание на этой основе конструкций, позволяющих исключить возможность ложных положений гироприбора при его точностных проверках. Одновременно это изобретение позволяет существенно упростить методику позиционирования гироприбора в пространстве, упростить само устройство с одновременным получением оперативной информации о положении установочной плоскости гироприбора в пространстве при ортогональных разворотах самого гироприбора.
Основа заявленного способа заключается в определении необходимых для испытаний положений гироприбора, взаимной фиксации этих положений, при этом для средств испытаний гироприборов характерно применение в качестве отправной базы, связанной с необходимыми положениями гироприбора, использование установочной плоскости гироприбора, которая совмещается с самим гироприбором при установке последнего на опоры в испытательной аппаратуре. Исследование положений установочной плоскости, определяемой положением контактных поверхностей опор в испытательной аппаратуре, которые при испытаниях и измерении параметров гироприбора совмещаются с контактными поверхностями опор самого гироприбора, позволило контролировать положение и самого гироприбора. Способ позволяет создать пакет жестко соединенных между собой плоскостей, позволяющих реализовать все необходимые положения гироприбора при его испытаниях и исключить возможность использования плоскостей, которые не соответствуют требованиям испытаний гироприбора.
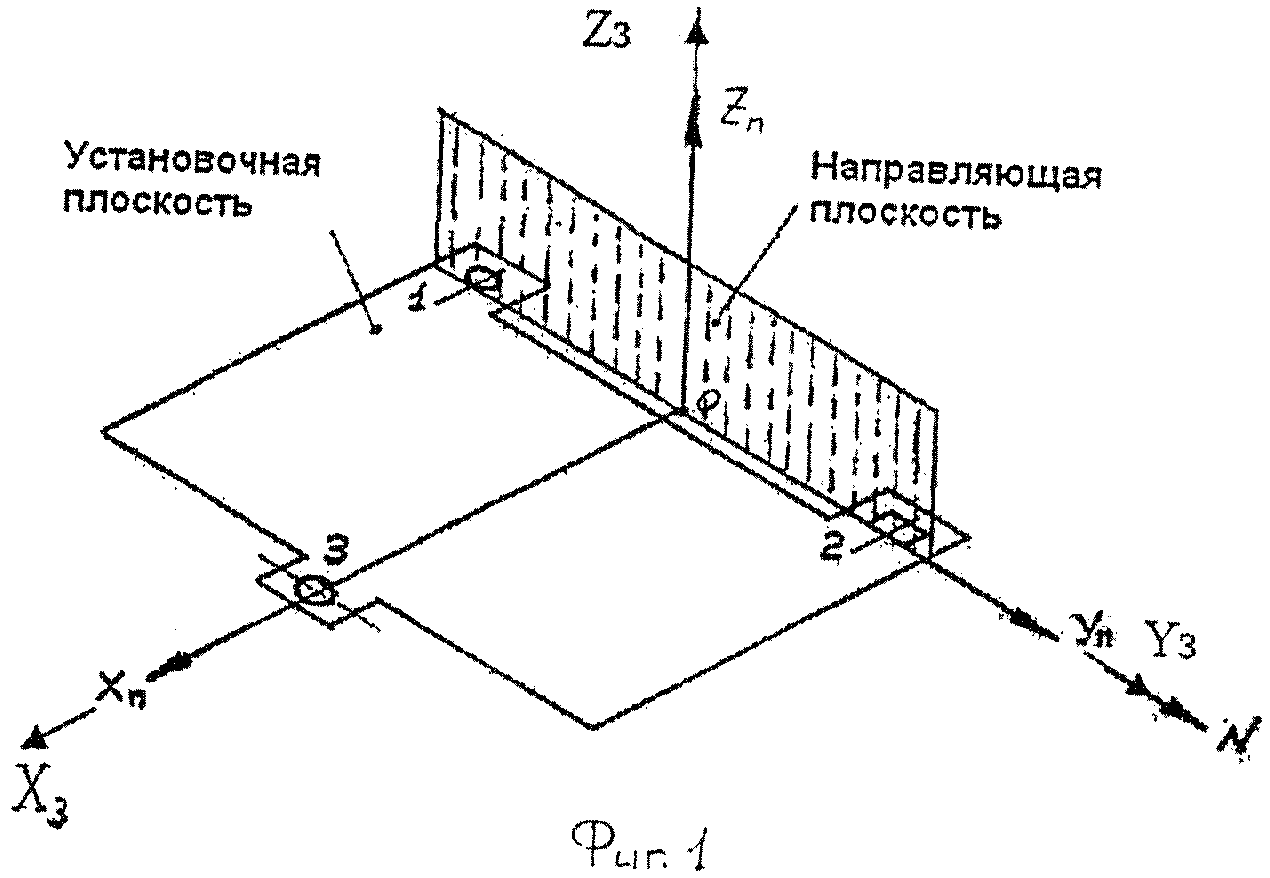
Приборная система координат XпYпZп материализована в конструкции гироприбора типа ГИВУС (ГИВУС - гироскопический измеритель вектора угловой скорости) двумя плоскостями - установочной и направляющей. Иногда установочную плоскость гироприбора называют базовой или опорной. Одновременно с установочной плоскостью, определяемой как плоскость, касательную к установочным площадкам опор гироприбора (или под гироприбор), существует направляющая плоскость, определяемая как плоскость, касательная к внутренним поверхностям отверстий опор №1 и №2 гироприбора со стороны опоры №3 и перпендикулярная к установочной плоскости.
Материализация приборной системы координат OXпYпZп осуществляется следующим образом:
- ось OYп лежит на линии пересечения установочной и направляющей плоскостей;
- ось ОХп лежит в установочной плоскости и перпендикулярна направляющей плоскости;
- ось OZп лежит в направляющей плоскости и дополняет систему координат до правой.
Условно принято, что направление входной угловой скорости считать положительным при вращении против часовой стрелки вокруг осей приборной системы координат (если смотреть с конца оси) и отрицательным при вращении по часовой стрелке.
Все проверки проводят на неподвижном относительно Земли основании, роль которого во время испытаний гироприбора временно выполняет грузовая платформа одноосного скоростного стенда с вертикальной осью вращения.
На схеме фиг.1 изображено все вышеизложенное, при этом ХзYзZз - координаты места измерения параметров гироприбора, ось OYп направлена на Север (N), а само положение гироприбора в пространстве определяется положениями установочной и направляющей плоскостей, связанных с конструкцией и деталями корпуса гироприбора, относительно плоскости горизонта и меридиана на широте φ0 места испытаний.
В данном положении установочная плоскость XпYп горизонтальна в точке места испытаний, направляющая плоскость YпZп вертикальна и параллельна плоскости меридиана. Приборная ось OYп направлена на Север (N), а ось OZп ориентирована вертикально в точке места испытаний.
В предлагаемом способе данное положение определено как исходное, при этом сам способ основан на определении в пространстве необходимых для проведения испытаний гироприбора положений его установочной плоскости. Эти положения определяются относительно неподвижной системы координат в точке места испытаний ХзYзZз. Например, для гироприборов типа ГИВУС необходимо, как минимум, определить, кроме исходного, еще два положения ортогональных первому (исходному) положению. При совмещении всех трех положений получают многогранный пространственный угол, при этом общая точка, принадлежащая всем трем плоскостям, является вершиной многогранного угла, а линии, по которым пересекаются плоскости, называются ребрами многогранного угла, при этом сами ребра образуют при вершине плоские углы, которые, в силу перпендикулярности относительно друг друга составляющих плоскостей, являются прямыми углами. Для идентификации результатов измерений параметров гироприбора опору при вершине многогранного угла, при реализации данного способа, необходимо сделать общей для всех трех положений. Также необходимо определить и идентифицировать положение опорного треугольника для каждого выбранного положения установочной плоскости, для каждой грани (плоскости) многогранного угла.
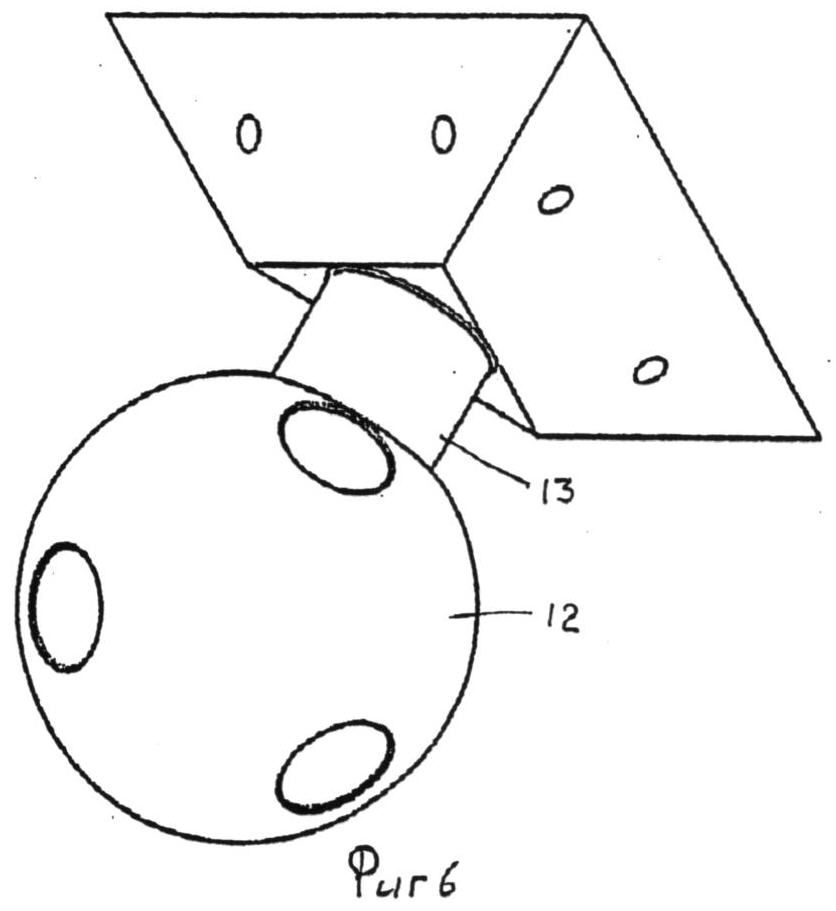
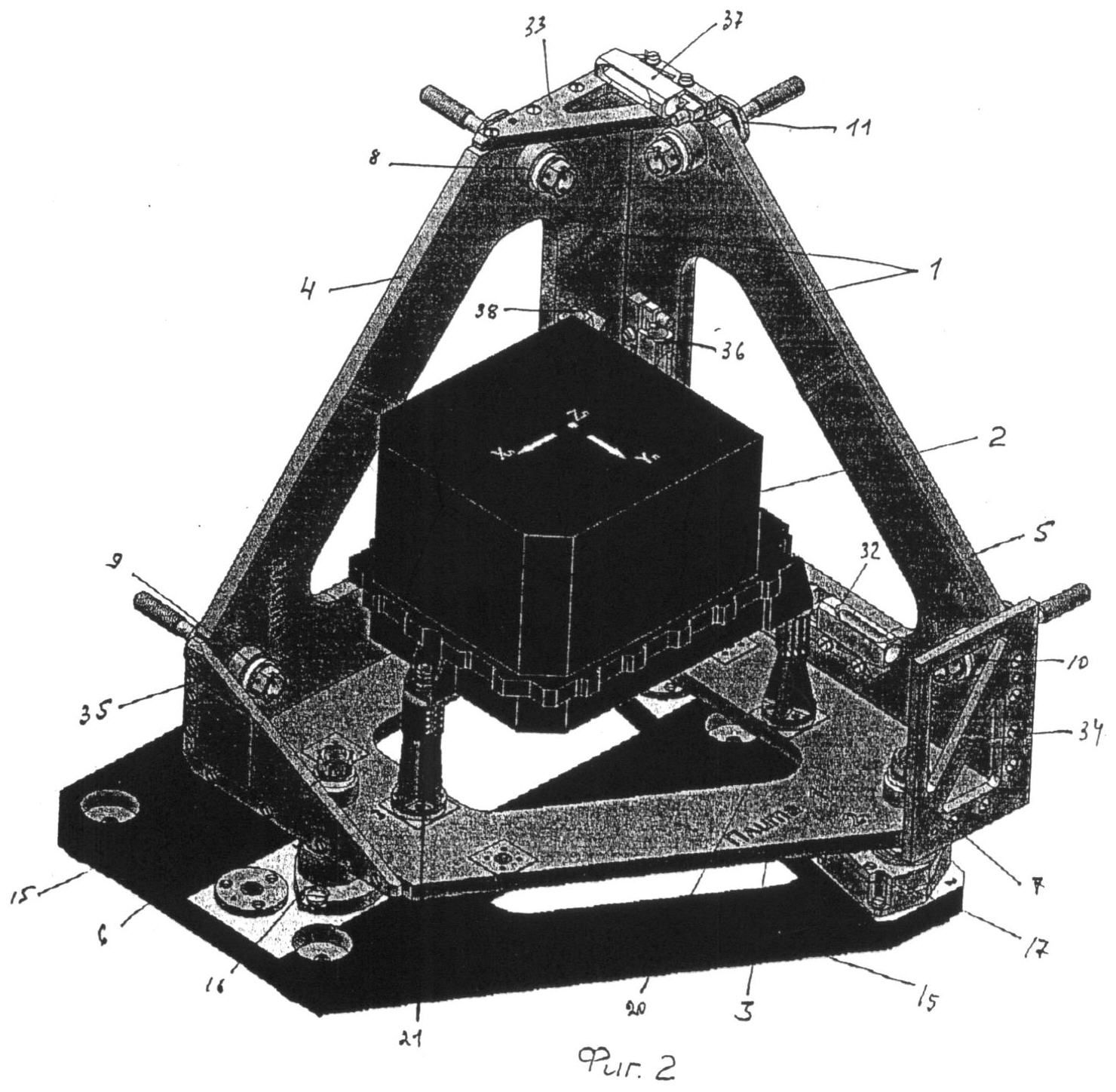
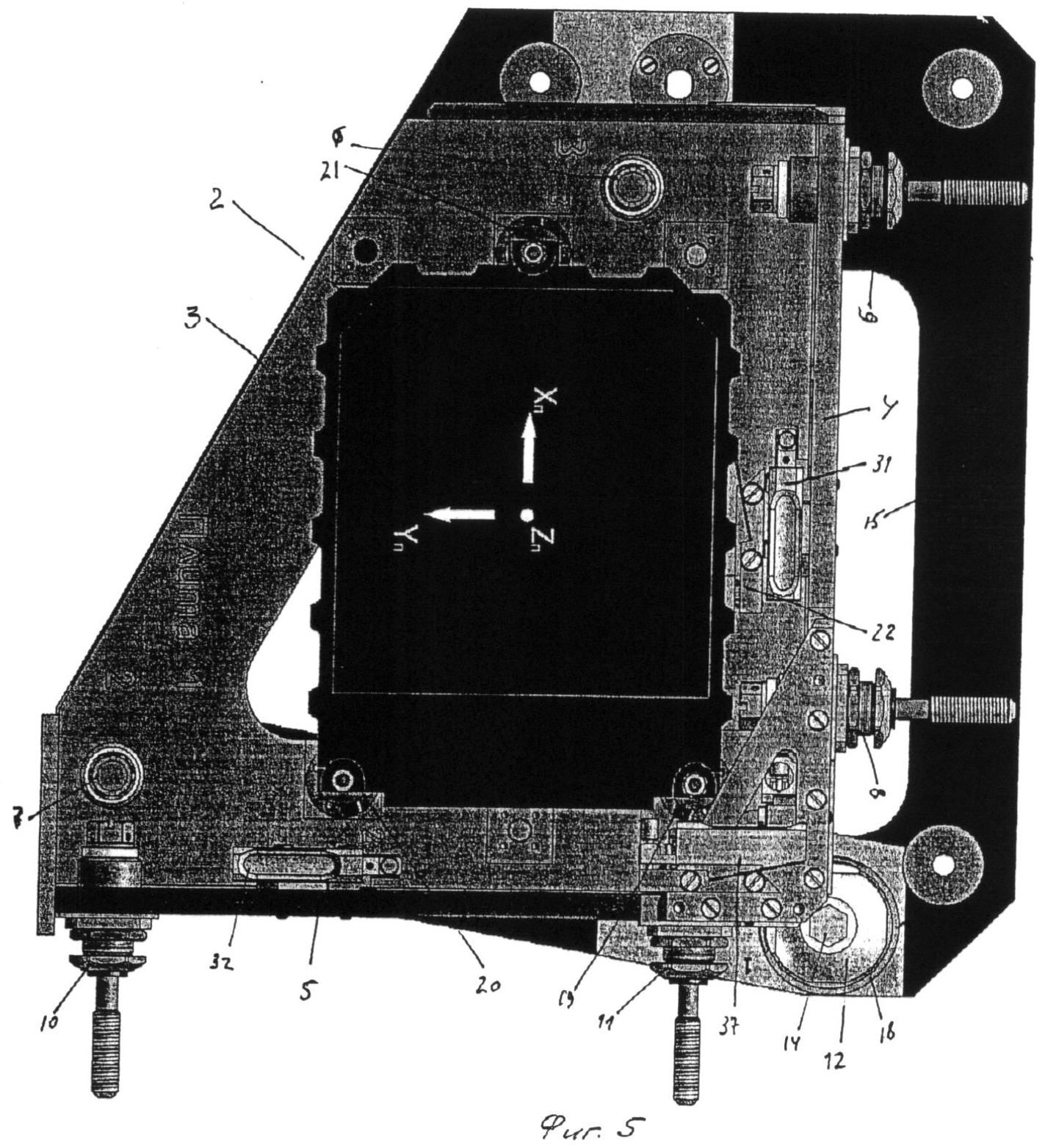
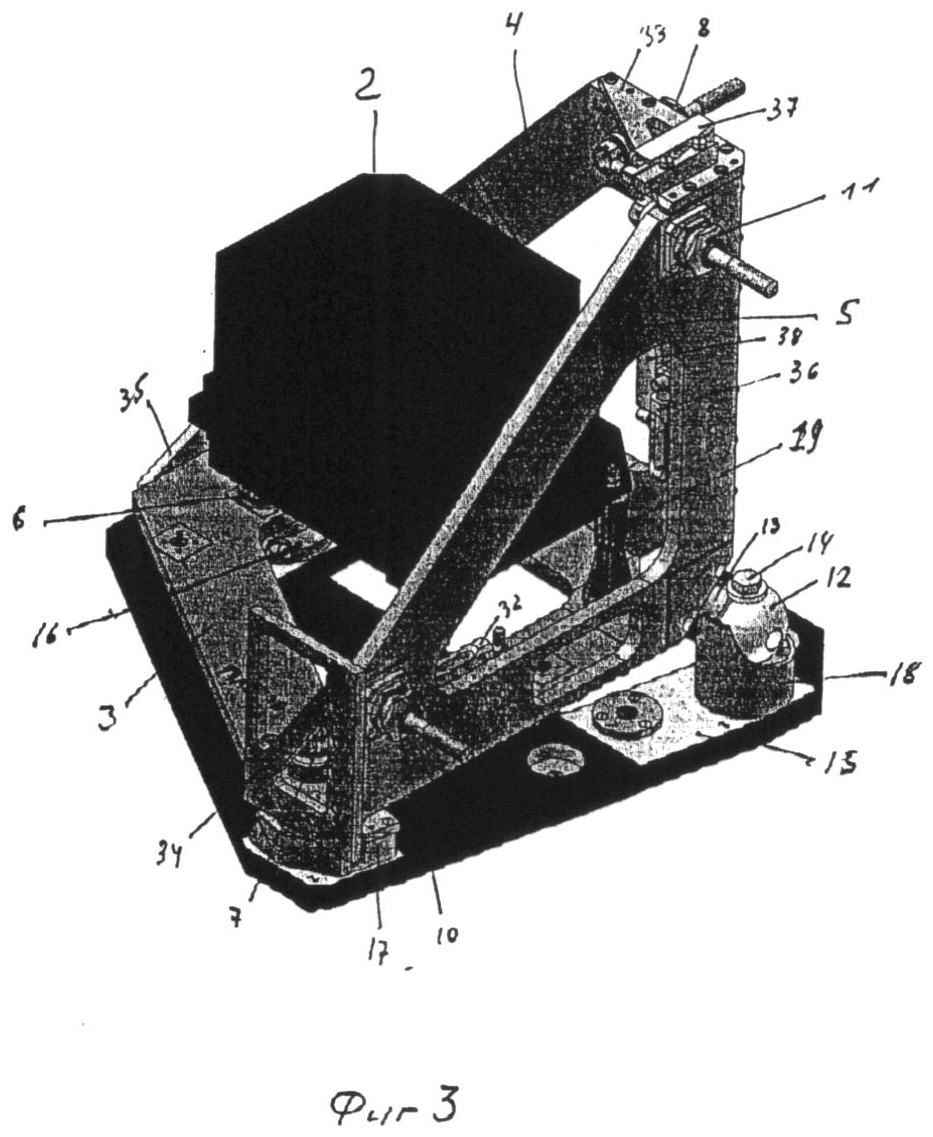
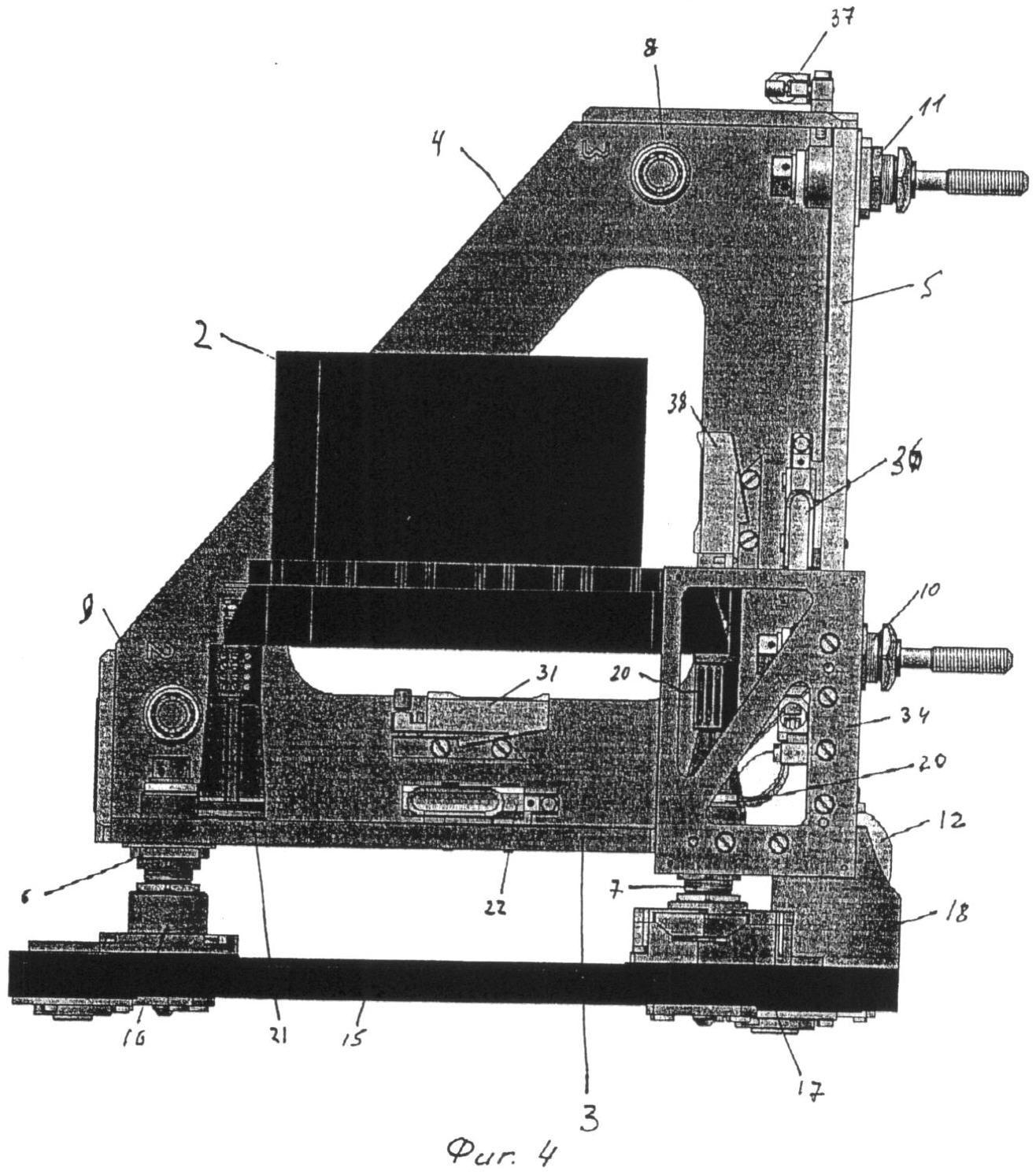
На фиг.2 изображено устройство, реализующее схему, изображенную на фиг.1 с вертикальной относительно плоскости горизонта осью Zп в месте испытаний. Устройство, изображенное на фиг.2, содержит устройство поз.1 позиционирования гироприбора в пространстве с установленным в нем гироприбором поз.2. Устройство позиционирования гироприбора в пространстве выполнено в виде многогранного пространственного угла, составленного из ортогонально расположенных трех плоских плит (граней) поз.3, 4 и 5. На фиг.3 изображено тоже устройство, что и на фиг.2, вид со стороны плиты поз.5. На фиг.4 изображено тоже устройство, что и на фиг.2, вид против вектора Yп. На фиг.5 изображено тоже устройство, что и на фиг.2, вид сверху (вид против вектора Zп). Для крепления устройства позиционирования гироприбора поз.1 на опорной базе поз.15 все грани с внешней стороны снабжены опорами поз.6 и поз.7 на грани поз.3, опорами поз.8 и поз.9 на грани поз.4, опорами поз.10 и поз.11 на грани поз.5. Схема размещения опор на всех внешних гранях устройства позиционирования гироприбора в пространстве идентична. Опоры поз.6, 7, 8, 9, 10 и 11 выполнены регулируемыми по высоте. Третья опора для каждой грани является общей для установки на любую грань и выполнена в виде шара поз.12 размещенного на консоли поз.13, который имеет три ортогональных отверстия для пропуска переставляемого болта поз.14, предназначенного для крепления устройства позиционирования гироприбора в пространстве на опорной базе поз.15. Опорная база поз.15 имеет две приемные опоры поз.16 и поз.17 для взаимодействия с регулируемыми опорами поз.6 и поз.7, поз.8 и поз.9, поз.10 и поз.11 устройства позиционирования гироприбора поз.1 в пространстве, размещенными на внешних сторонах граней поз.3, 4 и 5, а также приемный стакан поз.18 с резьбовым отверстием на сферической поверхности днища, предназначенный для установки в него шара поз.12 размещенного на консоли поз.13, с переставляемым болтом поз.14 для крепления устройства позиционирования гироприбора в пространстве поз.1 на опорной базе поз.15.
На фиг.6 изображена шаровая опора отдельно.
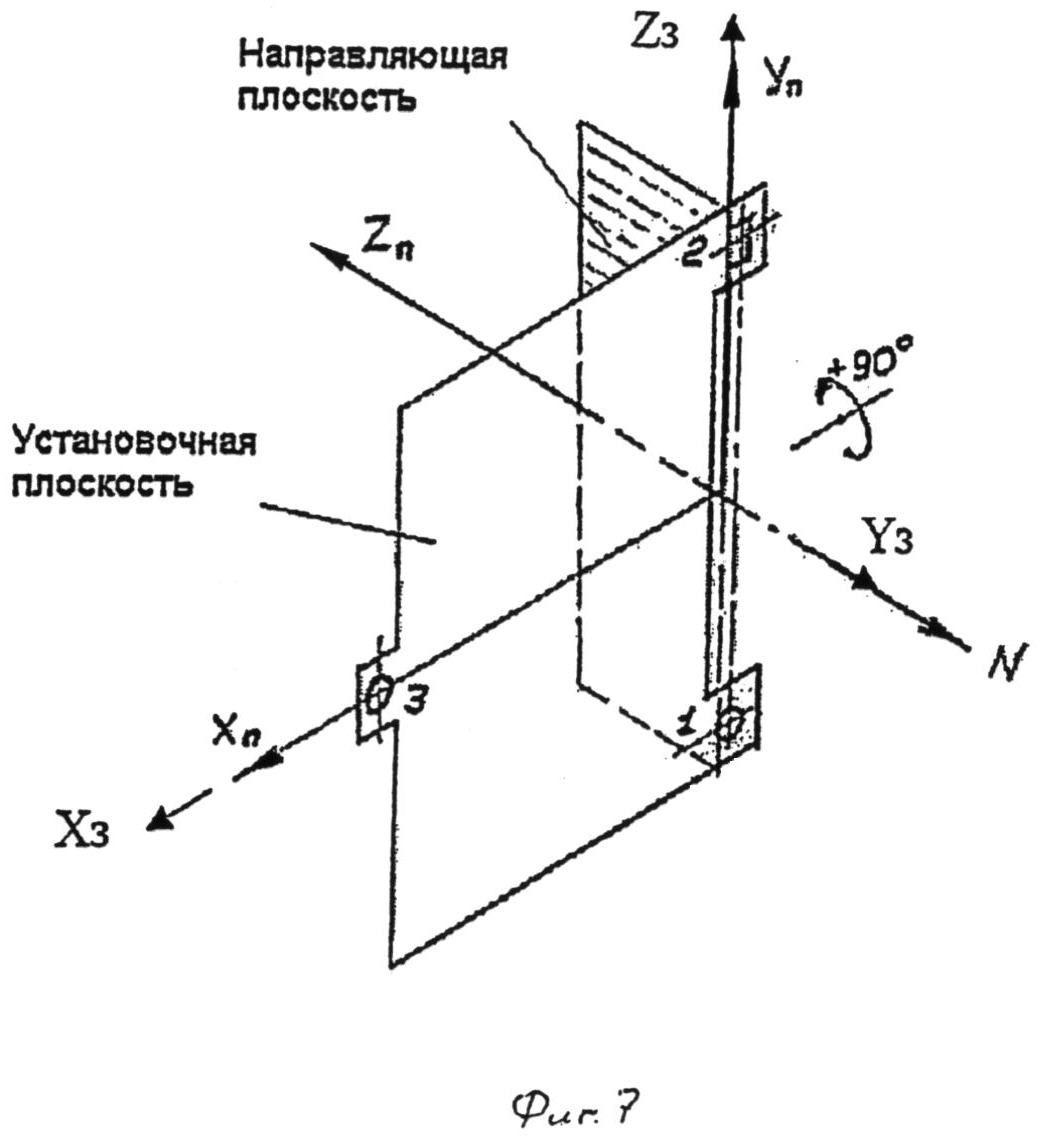
На фиг.7 изображена схема плоскостей устройства фиг.1, развернутого на 90° вокруг оси Хп, при этом установочная плоскость XпYп и направляющая плоскость YпZп вертикальны, направляющая плоскость YпZп параллельна плоскости меридиана, приборная ось Zп направлена на Юг (в сторону, противоположную Северу), а ось Yп ориентирована вертикально в точке места испытаний.
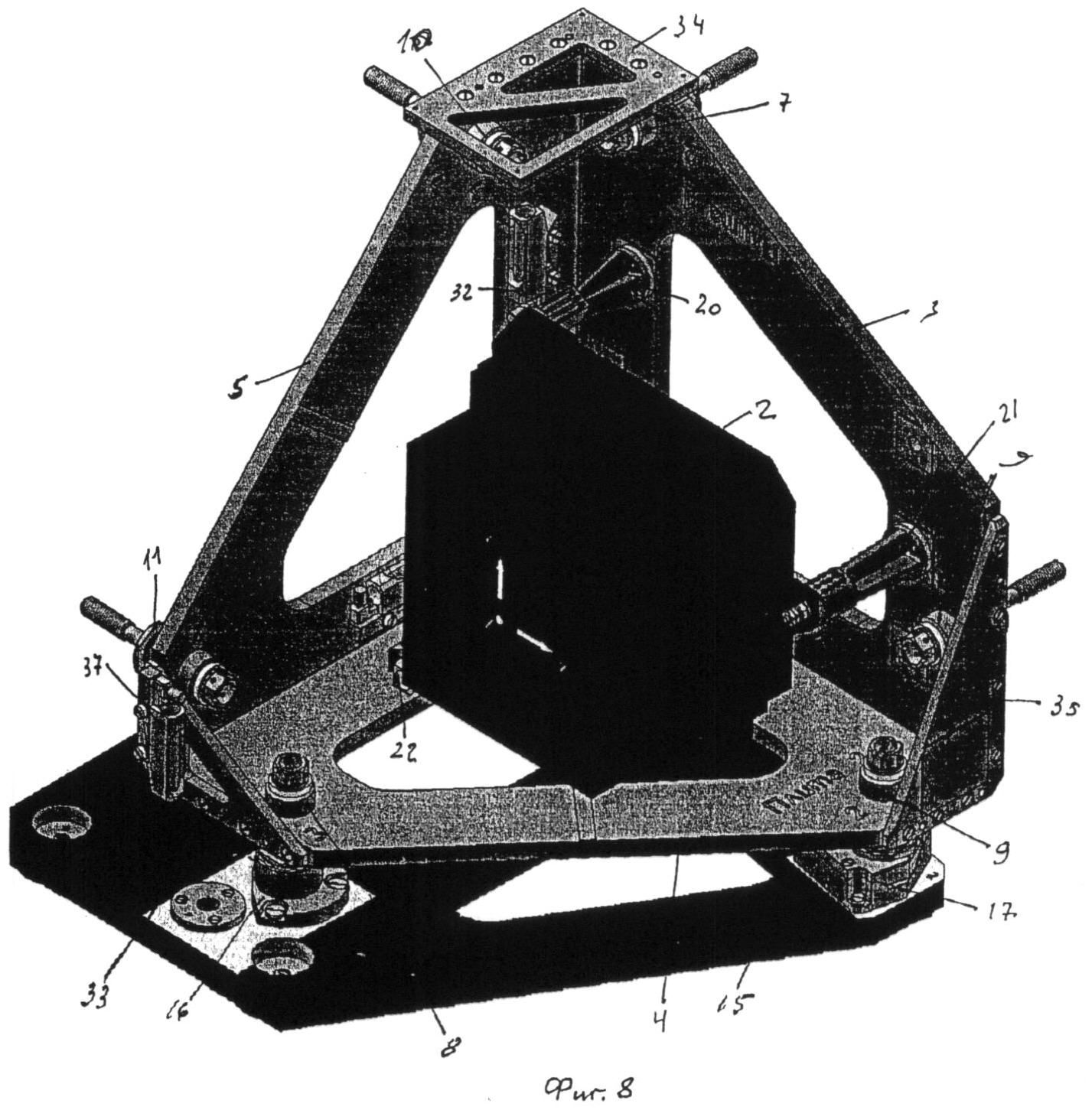
На фиг.8 изображено устройство, реализующее схему, изображенную на фиг.7 с ориентированной вертикально осью Yп в точке места испытаний.
Устройство, изображенное на схеме фиг.7, отличается от устройства, изображенного на схеме фиг.1, только своим положением в пространстве и положением в пространстве установленного в нем прибора поз.2 с его системой координат, относительно координат места испытаний (измерения параметров гироприбора), которое осталось неизменным.
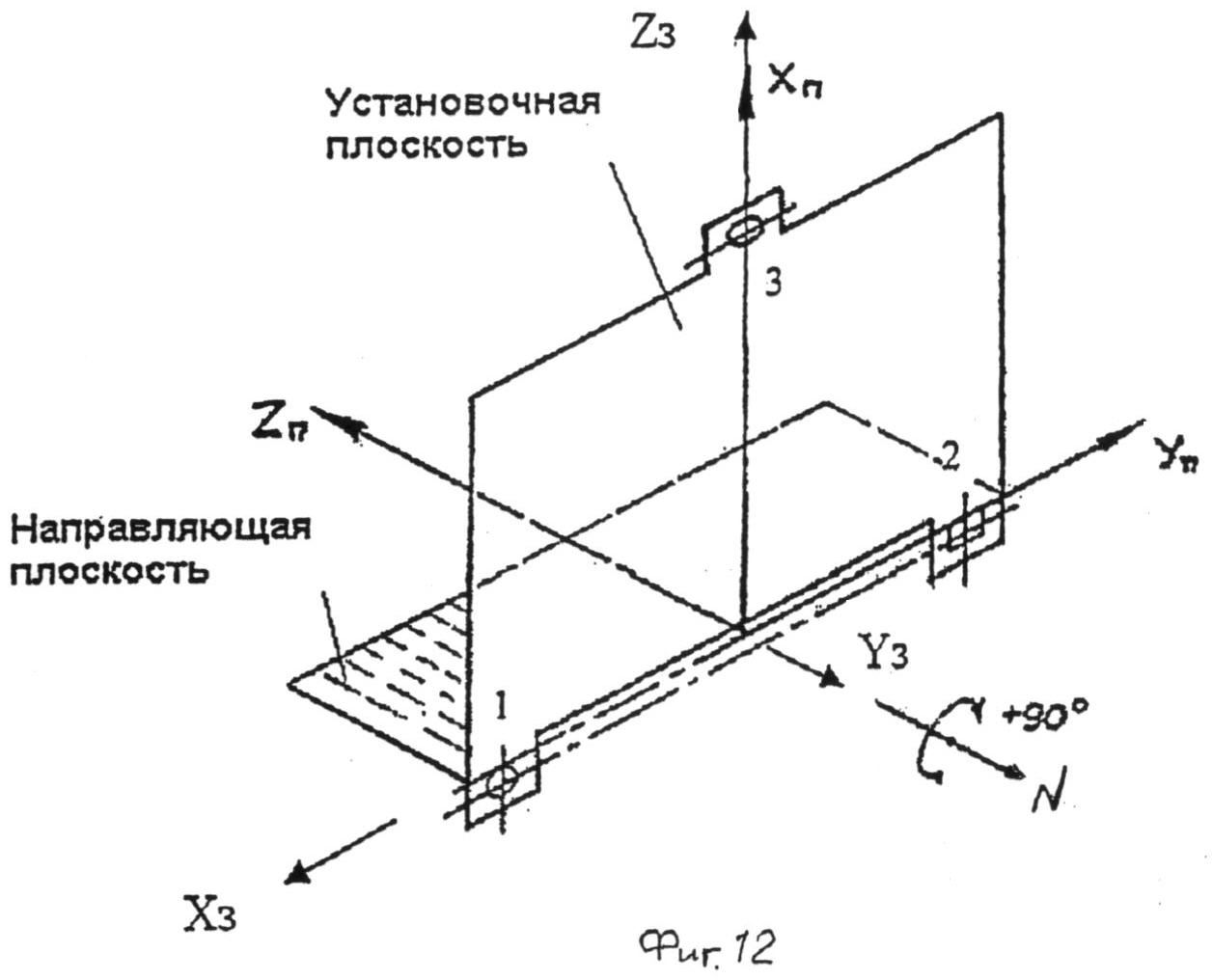
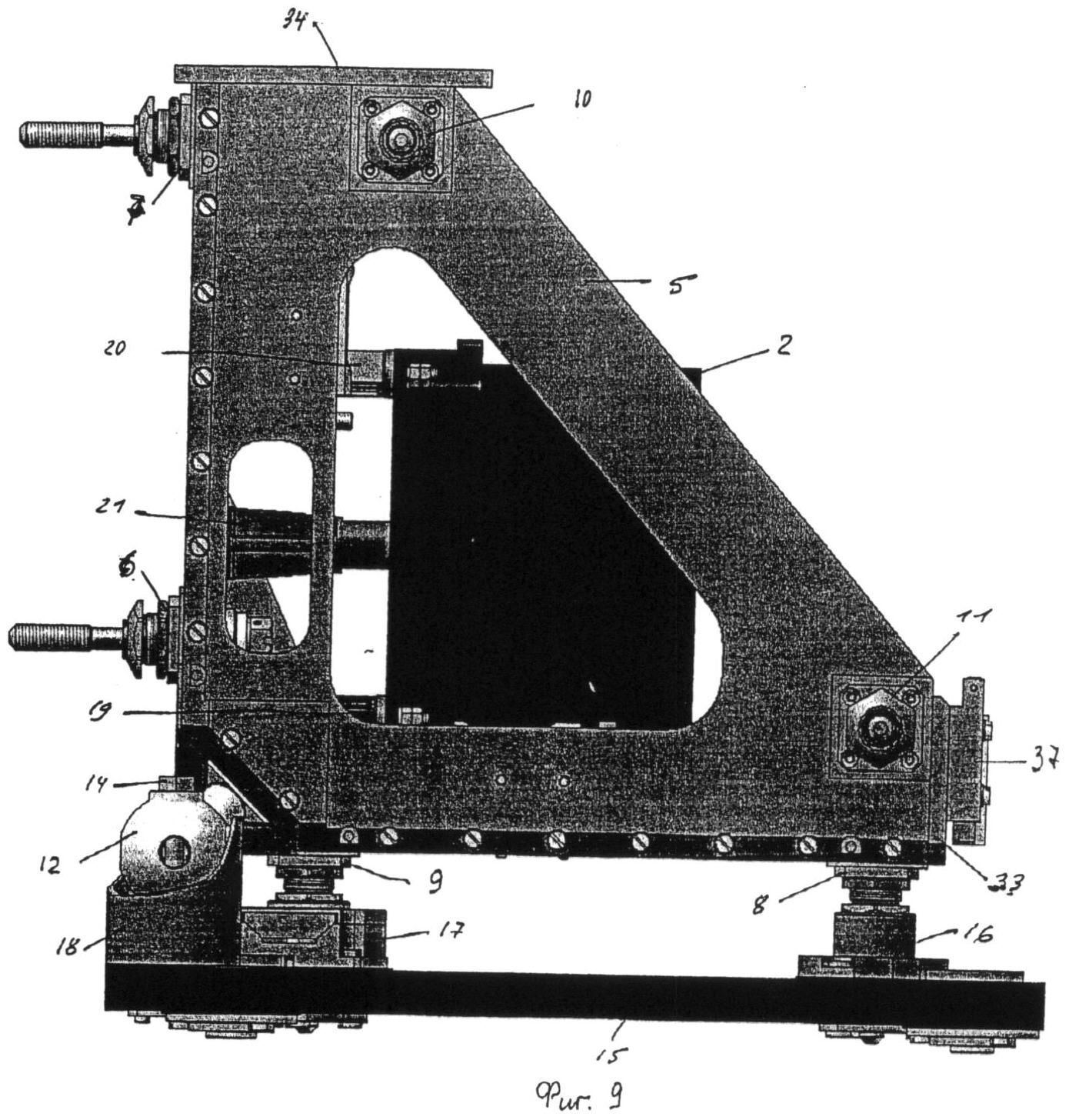
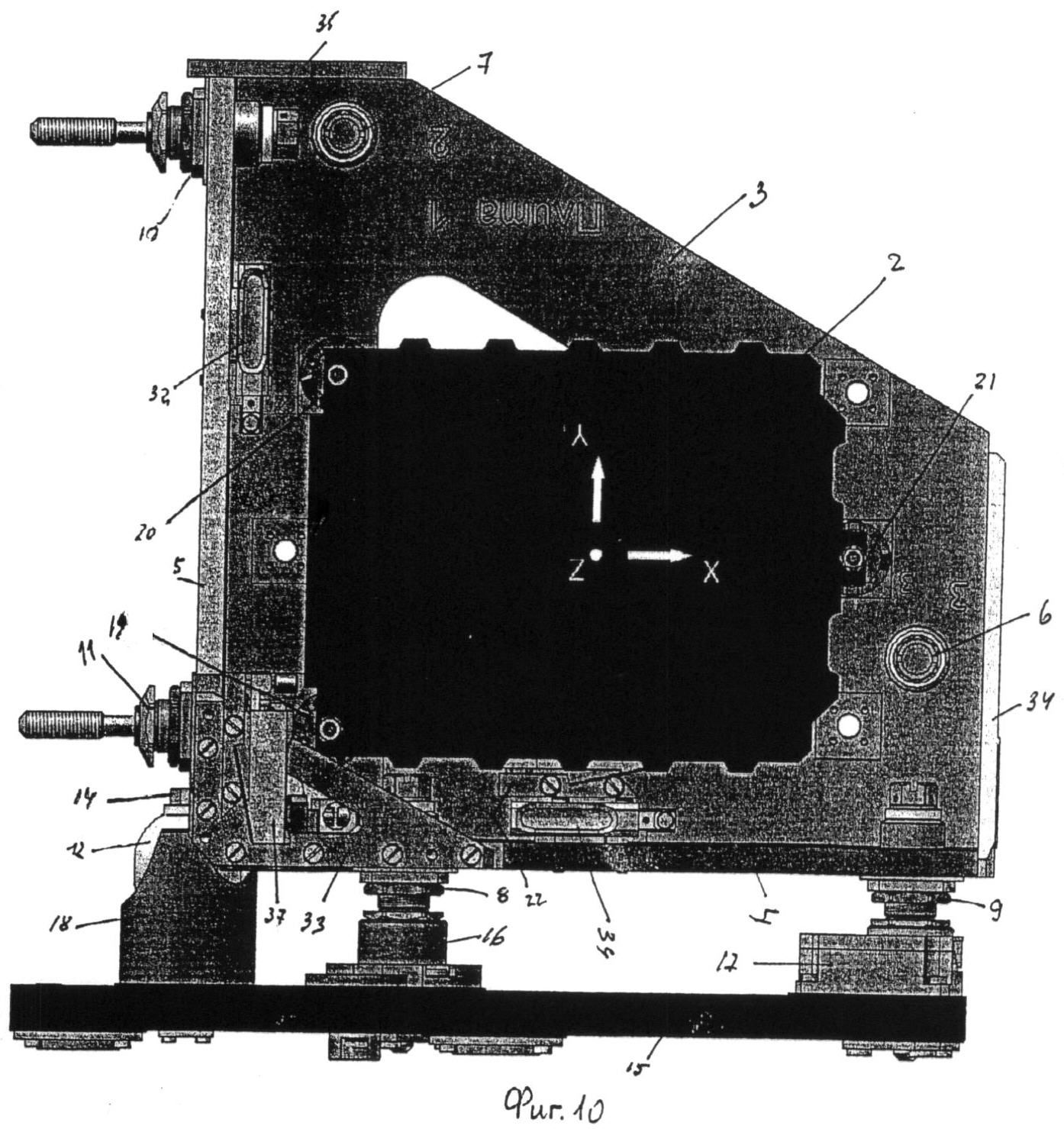
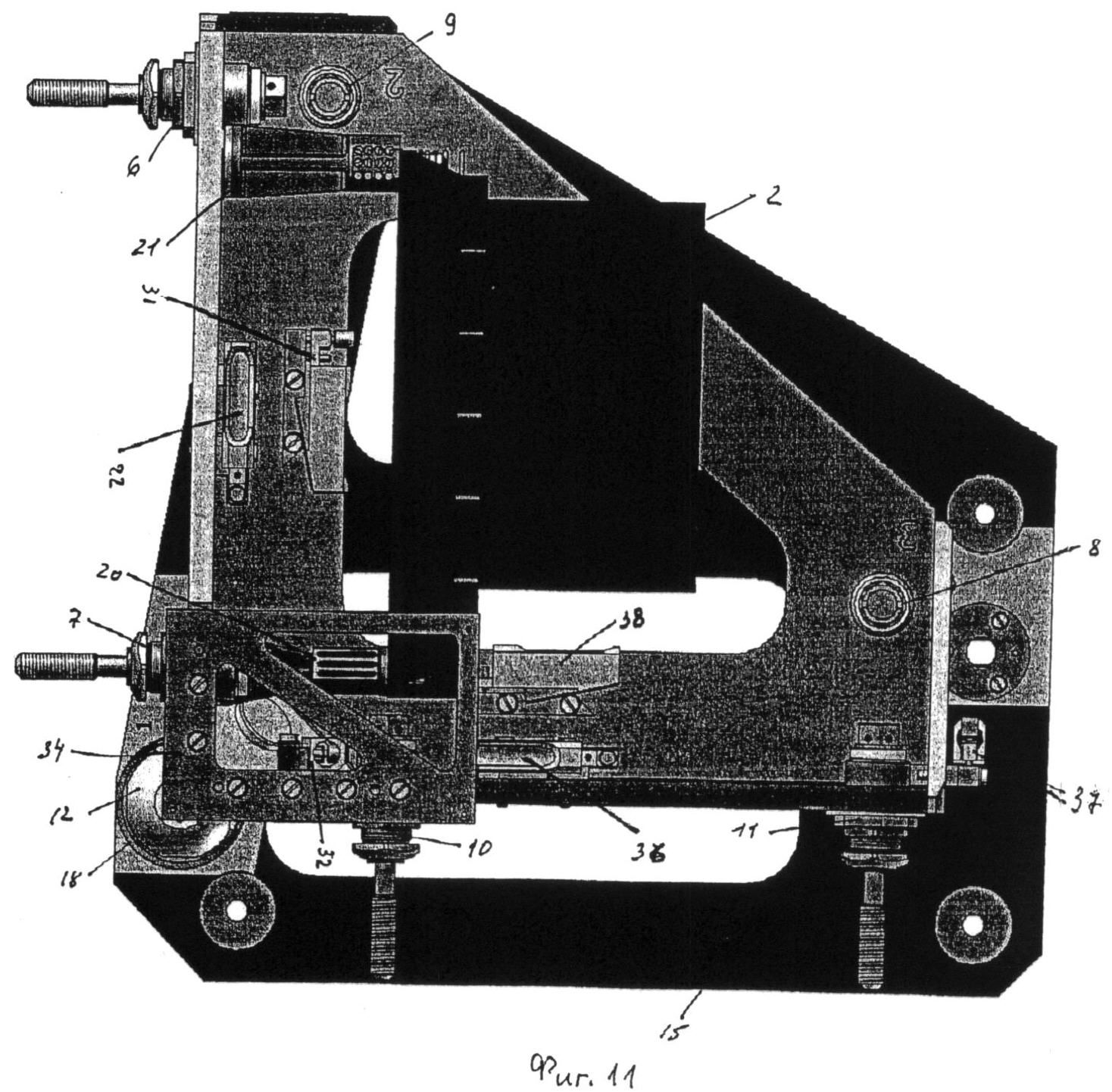
На фиг.9 изображено устройство фиг.8, вид по направлению оси Хп. На фиг.10 изображено устройство фиг.8, вид против направления оси Zn. На фиг.11 изображено устройство фиг.8, вид сверху (против направления оси Yп). На фиг.12 изображена схема устройства фиг.7, развернутого на 90° вокруг оси Zп, при этом в данном положении установочная плоскость XпYп гироприбора вертикальна и перпендикулярна плоскости меридиана. Направляющая плоскость YпZп горизонтальна, а приборная ось Zп направлена на Юг (в сторону, противоположную направлению на Север). Ось Хп ориентирована вертикально в точке места испытаний.
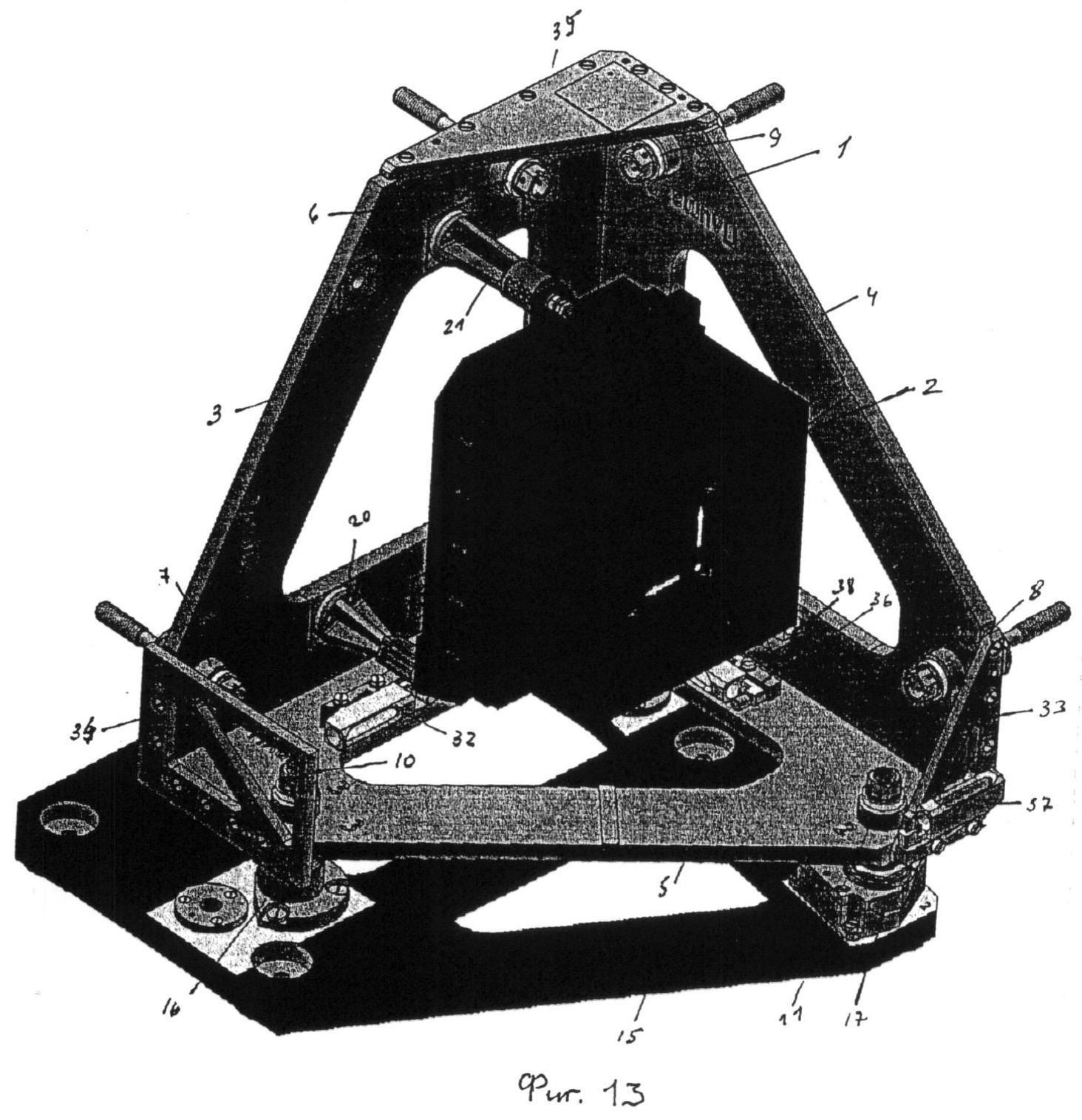
На фиг.13 изображено устройство, реализующее схему, изображенную на фиг.12, с вертикальной осью Хп гироприбора в точке места испытаний.
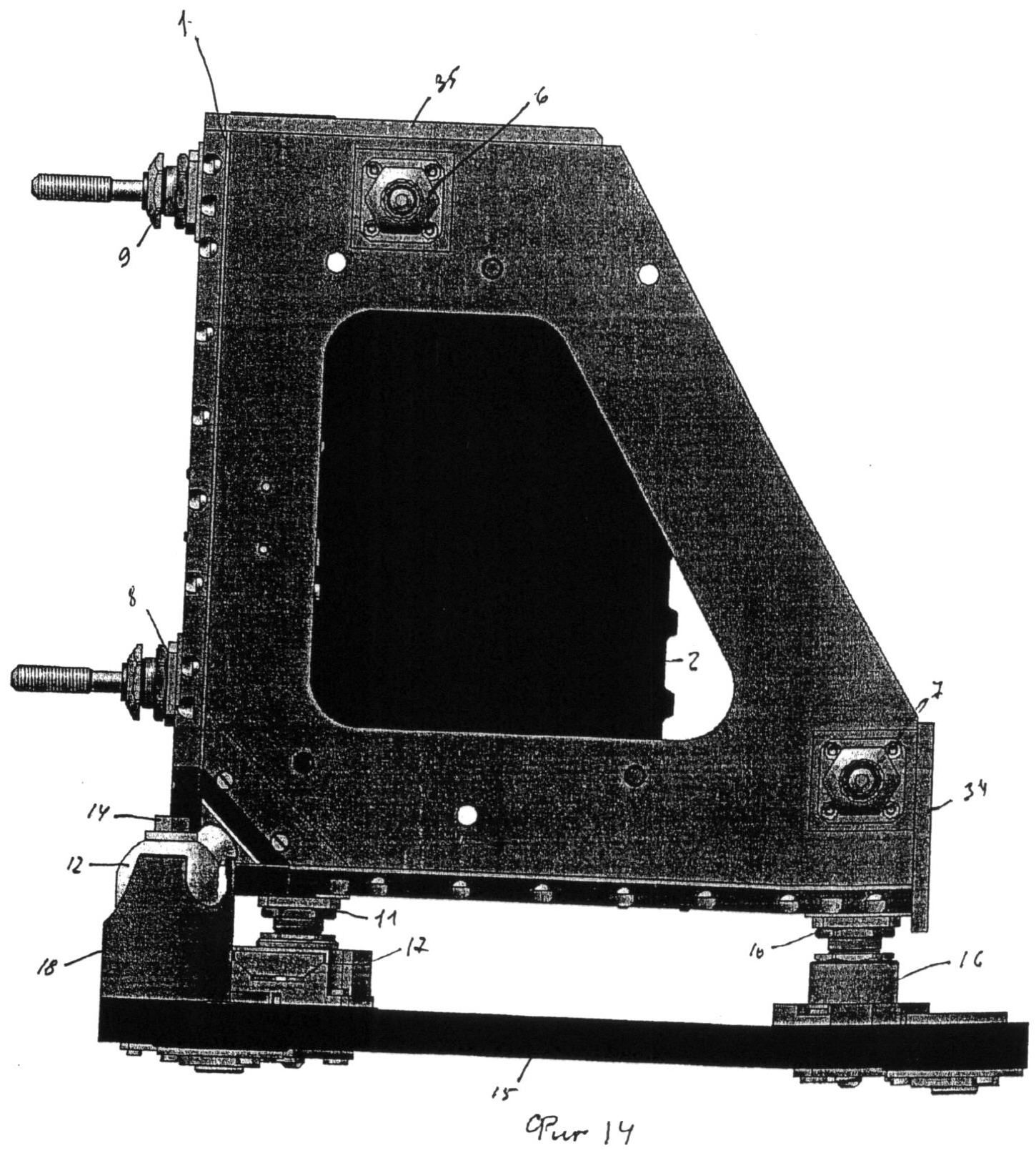
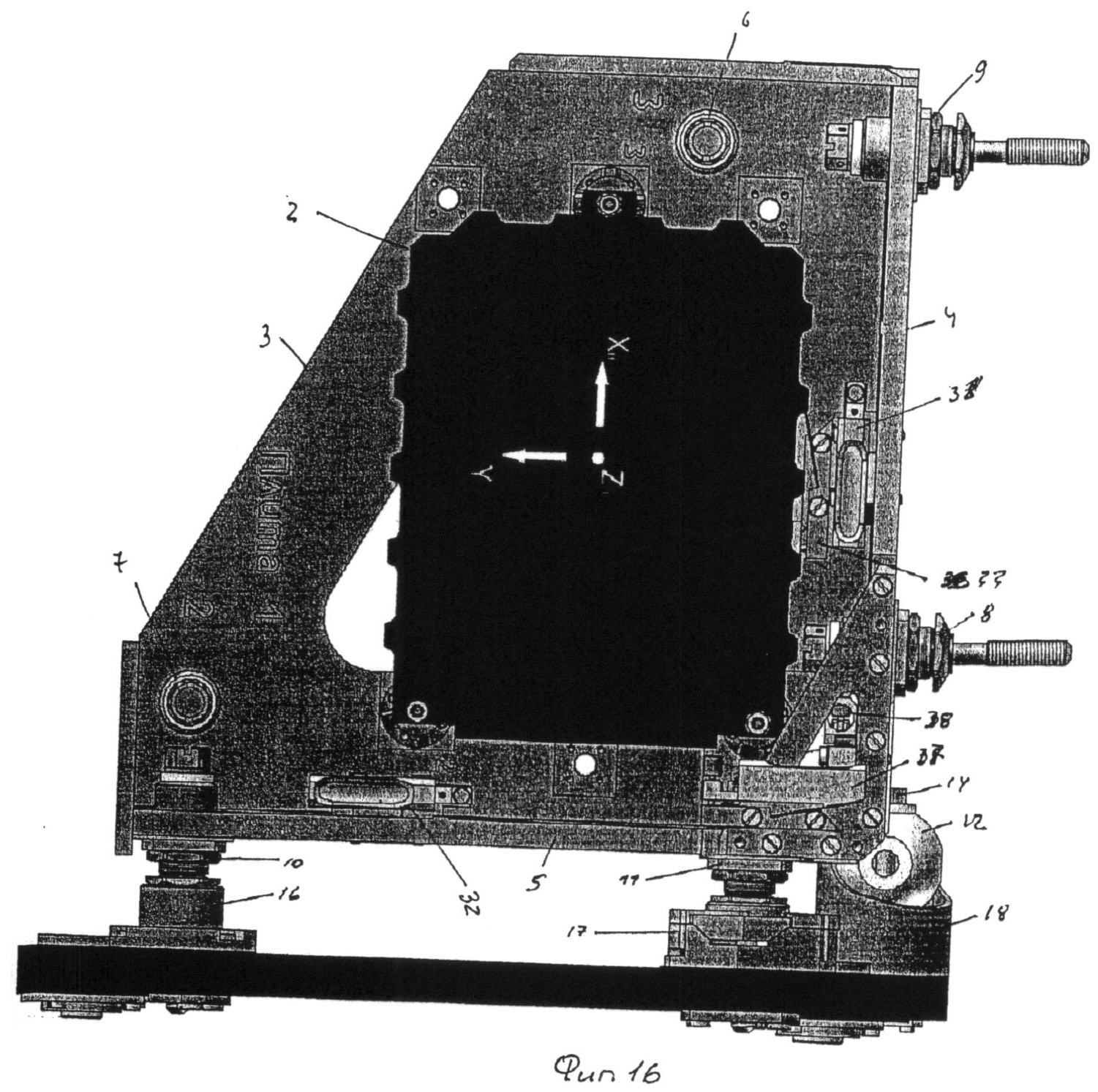
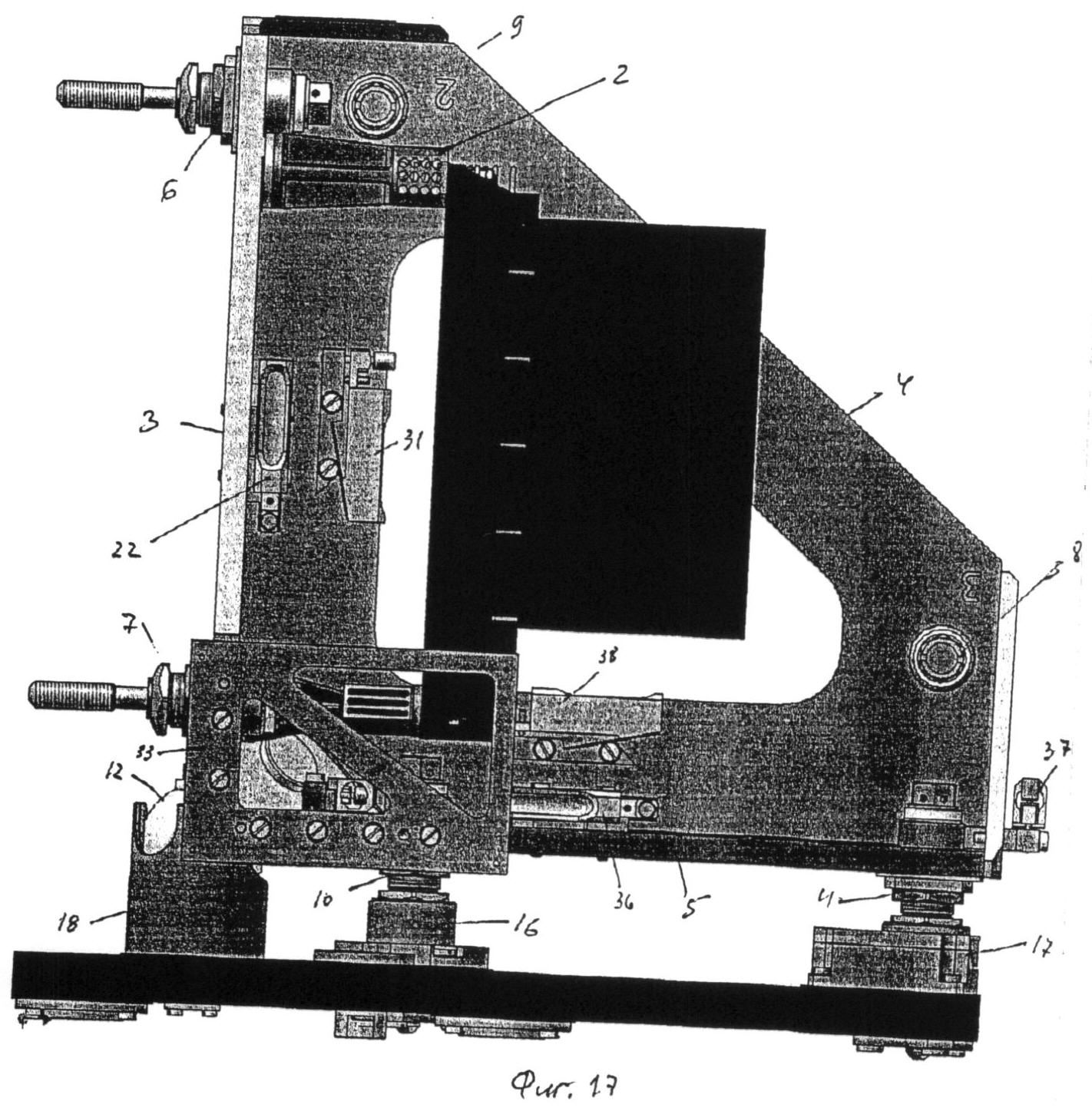
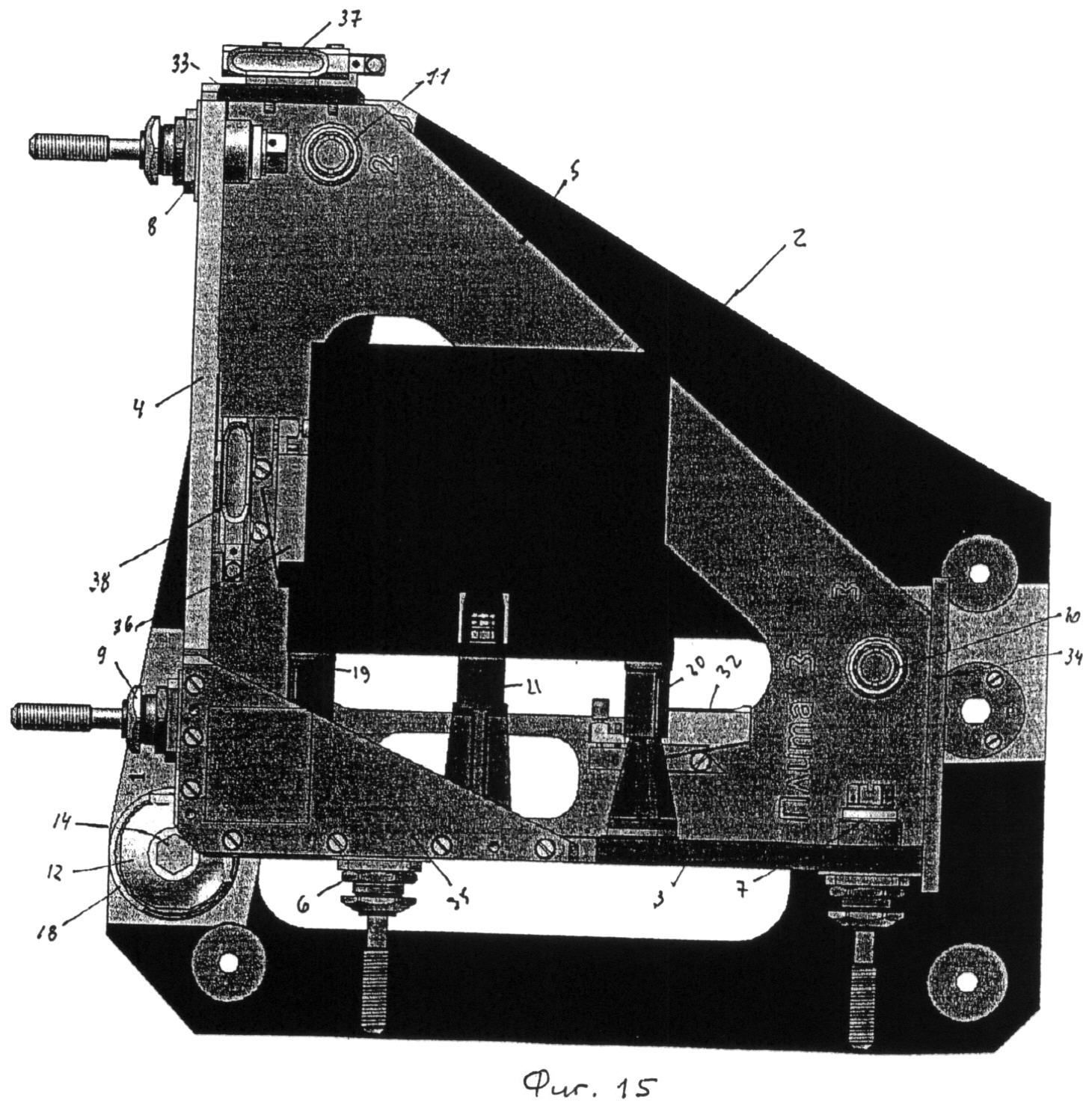
Устройство, изображенное на фиг.13, отличается от устройств, изображенных на фиг.8 и фиг.2 только своим положением в пространстве, а также положением в пространстве установленного в нем гироприбора с его системой координат, относительно координат места испытаний (измерения параметров гироприбора), которое осталось неизменным. На фиг.14 изображено устройство фиг.13, вид по направлению оси Zп. На фиг.15 изображено устройство фиг.13, вид сверху (вид против направления оси Хп). На фиг.16 изображено устройство фиг.13, вид против направления оси Zп. На фиг.17 изображено устройство фиг.13, вид против направления оси Yп. Если обратиться к схеме, изображенной на фиг.1, то необходимо заметить, что опорная система, состоящая из трех опор и изображенная на этой фиг.1, предполагает выполнение опоры 1 жесткой и точной, опоры 2 подвижной только в направлении линии пересечения установочной и направляющей плоскостей, что отмечено на схеме фиг.1 в виде продольного паза, совпадающего с направлением оси Yп (и совпадающего с направление на опору 1) и опоры 3, имеющей свободу перемещения как в направлении, совпадающем с направлением оси Хп, так и в направлении Yп. Такая опорная система позволяет сохранять неизменными все основные направления, используемые в предложенной схеме фиг.1.
Эта же схема реализована на фиг.3 и фиг.4 в установке устройства позиционирования гироприбора поз.1 в пространстве при его креплении на опорной базе поз.15 при его испытаниях, где шаровая опора поз.12 жестко устанавливается в приемном стакане поз.18, а опора поз.17 опорной базы поз.15 позволяет некоторые смещения по призме в направлении шаровой опоры поз.12 при установлении в ее сферическое гнездо опоры поз.7 устройства позиционирования гироприбора в пространстве поз.1. Опора поз.6 устройства позиционирования гироприбора в пространстве поз.1 смещает весь корпус опоры поз.16 опорной базы поз.15 при попадании сферы опоры поз.6 в приемное гнездо опоры поз.16 опорной базы поз.15, при этом корпус опоры поз.16 имеет возможность смещения в двух ортогональных направлениях. Одновременно следует заметить, что опоры поз.6 и поз.7 выполнены регулируемыми по высоте, что позволяет при установке гироприбора на приборные опоры №1 поз.19, опоры №2 поз.20 и опоры №3 поз.21, которые установлены по аналогичному принципу, как и опоры поз.12, поз.17 и поз.16, где опоры №1 под прибор поз.19 неподвижна, опора №2 под прибор поз.20 имеет возможность перемещения своей контактной поверхности в направлении приборной опоры поз.19, а опора №3 под прибор имеет некоторую возможность перемещения в двух ортогональных направлениях, сохранять прибору положение в пространстве, так как эти перемещения всегда определены в виде пределов допусков изготовления как самих опор, так и допусков на их разметку и установку на плите 1 поз.3 устройства позиционирования гироприбора в пространстве.
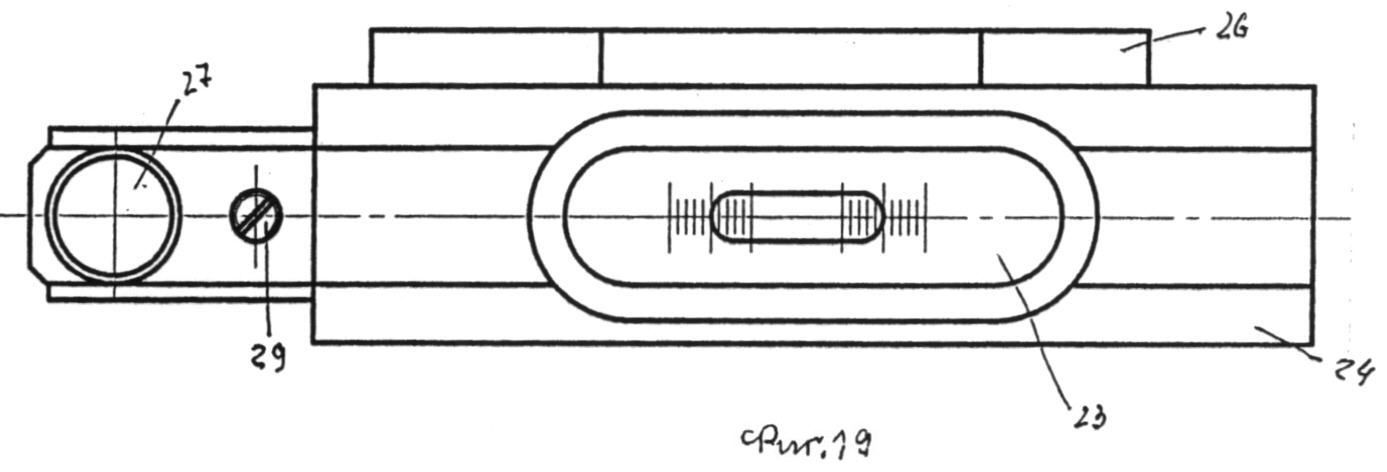
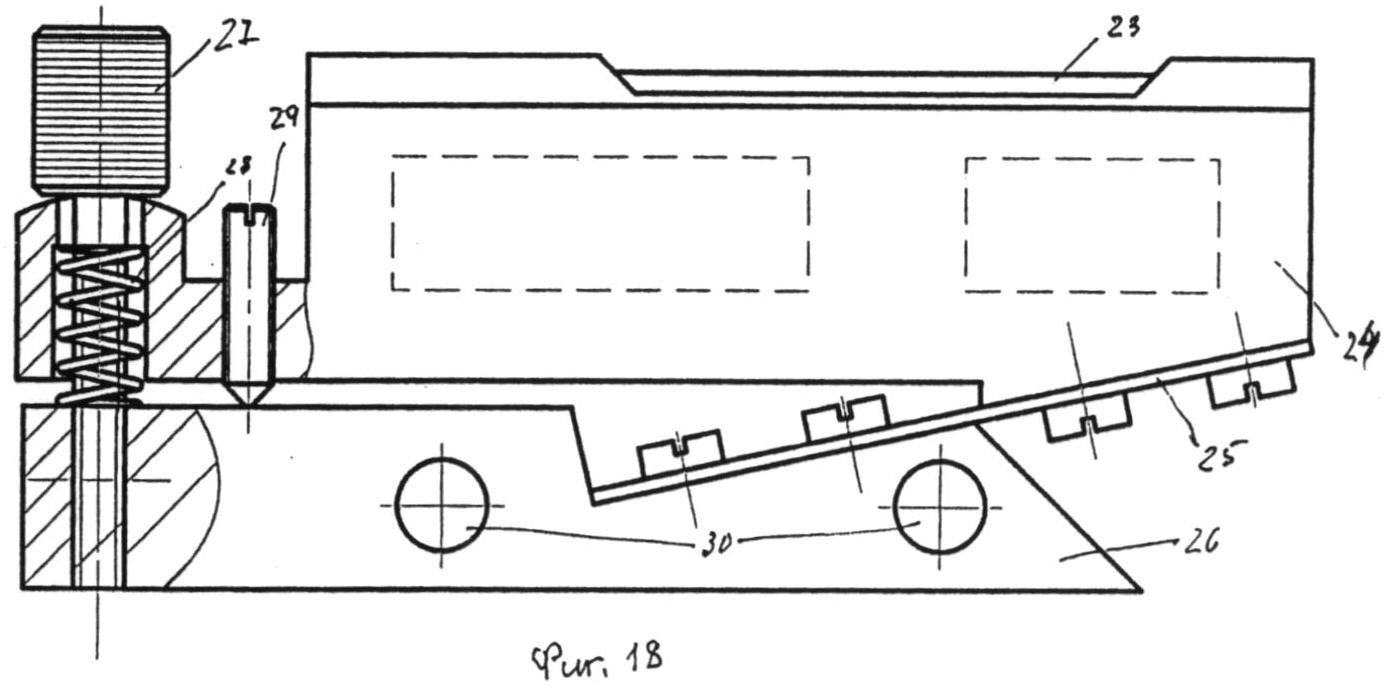
Одновременно на плите 1 поз.3 устройства позиционирования гироприбора в пространстве установлен изображенный на фиг.4, 8, 10, 16 и 17 нуль-индикатор поз.22, конструкция которого представлена на фиг.18 и 19, представляющий собой ампулу уровня поз.23, установленную и закрепленную внутри обоймы поз.24. Обойма поз.24 закреплена на плоской пластинчатой рессоре поз.25, при этом рессора поз.25 своим другим концом закреплена на крепежном фланце поз.26. Наклон обоймы поз.24 с ампулой уровня поз.23 регулируется регулировочным винтом поз.27, при этом между обоймой поз.24 и крепежным фланцем поз.26 установлена витая рессорная пружина поз.28. Положение обоймы поз.24 относительно крепежного фланца поз.26 фиксируется стопорным винтом поз.29. В крепежном фланце поз.26 выполнены два отверстия для установки крепления нуль-индикатора.
Устройство позиционирования гироприбора в пространстве работает следующим образом. На опорную базу поз.15 устанавливается устройство позиционирования гироприбора в пространстве поз.1, представляющее собой многогранный пространственный угол, при этом шаровая опора поз.12, размещенная при вершине многогранного пространственного угла, заводится в приемный стакан поз.18 опорной базы поз.15, опора поз.6 устройства позиционирования гироприбора в пространстве поз.1 устанавливается на приемную опору поз.16 опорной базы поз.15.
После этого на опоры под гироприбор №1 поз.19, №2 поз.20 и №3 поз.21 устанавливается технологическое приспособление, которое позволяет повторить положение плоскости, определяемой контактными поверхностями опор под гироприбор №1 поз.19, №2 поз.20 и №3 поз.21, на которую можно установить средства контроля и измерения горизонтальности и вертикальности плоскости, определяемой контактными поверхностями опор под гироприбор. В простейшем случае это может быть куб-призма, установленная и закрепленная на технологическом приспособлении и которая имеет на всех других своих гранях платики для установки уровней в двух ортогональных направлениях. Таким образом, на контрольные платики куб-призмы, параллельные основанию куб-призмы, которые параллельны опорной плоскости гироприбора, устанавливаются уровни. На основании показаний уровней (при необходимости, если пузырьки ампул уровней находятся не в центре ампул) проводят регулировку положения опорной плоскости гироприбора, для чего регулируют высоту опор поз.6 и поз.7 устройства позиционирования гироприбора в пространстве поз.1. Ориентируясь на положение пузырьков уровней, установленных на контрольной куб-призме, регулировкой высоты опор поз.6 и поз.7 добиваются положения, когда в обоих контрольных уровнях пузырьки ампул будут находиться в центрах ампул этих уровней. В этом положении ввинчивают болты опор поз.6 и поз.7 в соответствующее приемные опоры поз.16 и поз.17 опорной базы поз.15, а также ввинчивают болт поз.14, через вертикальное отверстие в шаровой опоре поз.12, в резьбовое отверстие сферы приемного стакана поз.18 опорной базы поз.15. После этого затягивают болты на всех перечисленных опорах требуемым усилием. При необходимости регулировку опор повторяют, добиваясь положения, когда затянуты все болты крепления устройства позиционирования гироприбора в пространстве поз.1 на опорной базе поз.15, а пузырьки ампул обоих контрольных уровней будут находиться в центрах их ампул.
После этого проводят настройку установленных в устройстве позиционирования гироприбора в пространстве поз.1 нуль-индикаторов поз.31 и поз.32, которые сохраняют (контролируют) это положение опорной плоскости гироприбора, после их фиксации стопорными винтами поз.29.
Снимают с контрольной куб-призмы оба контрольных уровня.
Такое положение определяется условно как положение №1, которое устанавливает, что плоскость XпYп, определяемая на фиг.1, находится в плоскости горизонта, а ось Zп - вертикальна. (Конечно, все это отрегулировано с учетом точности примененных технологических средств и средств измерения и контроля).
Следующей операцией настройки устройства позиционирования гироприбора в пространстве будет настройка вертикального положения оси Yп фиг.7, для чего вывинчивают из опор поз.16 и поз.17 через опоры поз.6 и поз.7 болты, крепящие устройство позиционирования гироприбора в пространстве поз.1 к опорной базе поз.15, а также полностью вывинчивают крепежный болт поз.14 из резьбового отверстия вогнутой сферы, расположенной в приемном стакане поз.18 опорной базы поз.15.
Не выводя шаровую опору поз.15 из премного стакана поз.8, за ручки-планки поз.33 и поз.34 приподнимают плиту 1 поз.3 устройства позиционирования гироприбора в пространстве поз.1 над плитой опорной базы поз.15 и разворачивают устройство позиционирования гироприбора в пространстве поз.1 таким образом, чтобы опора поз.9 устройства позиционирования гироприбора в пространстве поз.1 была размещена над приемной опорой поз.17 опорной базы поз.15, а опора поз.8 устройства позиционирования гироприбора в пространстве поз.1 находилась бы над приемной опорой поз.16 опорной базы поз.15. Осторожно опускают устройство позиционирования гироприбора в пространстве поз.1 на опоры поз.16 и поз.17 опорной базы поз.15.
Устанавливают на куб-призму два контрольных уровня, при этом плоскость, на которую установили контрольные уровни, перпендикулярна опорной плоскости гироприбора и параллельна плите 2 поз.4 устройства позиционирования гироприбора в пространстве поз.1.
На основании показаний контрольных уровней, установленных на куб-призме (при необходимости, если пузырьки ампул уровней находятся не в центре ампул) проводят регулировку положения опорной плоскости гироприбора, для чего регулируют высоту опор поз.8 и поз.9 устройства позиционирования гироприбора в пространстве поз.1. Ориентируясь на положение пузырьков контрольных уровней, установленных на контрольной куб-призме, регулировкой высоты опор поз.8 и поз.9 добиваются положения, когда в обоих контрольных уровнях пузырьки ампул будут находиться в центрах ампул этих уровней. В этом положении ввинчивают болты опор поз.8 и поз.9 в соответствующие приемные опоры поз.16 и поз.17 опорной базы поз.15, а также ввинчивают болт поз.14, через вертикальное отверстие в шаровой опоре поз.12, в резьбовое отверстие вогнутой сферы приемного стакана поз.18 опорной базы поз.15.
После этого затягивают болты на всех перечисленных опорах требуемым усилием. При необходимости регулировку опор повторяют, добиваясь положения, когда затянуты все болты крепления устройства позиционирования гироприбора в пространстве поз.1 на опорной базе поз.15, а пузырьки ампул обоих контрольных уровней будут находиться в центрах их ампул.
После этого производят настройку установленных в устройстве позиционирования гироприбора в пространстве поз.1 нуль-индикаторов поз.22 и поз.36, которые сохраняют это полученное положение опорной плоскости гироприбора, запирая оба нуль-индикатора поз.22 и поз.36 стопорными винтами поз.29.
Снимают с контрольной куб-призмы оба контрольных уровня.
Полученное положение условно определяется как положение №2, которое устанавливает, что плоскость XпZп, определяемая на фиг.7, находится в плоскости горизонта, а ось Yп - вертикальна.
Дальнейшей операцией настройки устройства позиционирования гироприбора в пространстве поз.1, будет настройка вертикального положения оси Хп, для чего вывинчивают из опор поз.16 и поз.17 через опоры поз.8 и поз.9 болты, крепящие устройство позиционирования гироприбора в пространстве поз.1 к опорной базе поз.15, а также полностью вывинчивают крепежный болт поз.14 из резьбового отверстия вогнутой сферы, расположенной в приемном стакане поз.18 опорной базы поз.15.
Не выводя шаровую опору поз.12 из приемного стакана поз.18, за ручки-планки поз.33 и поз.34 приподнимаем плиту 2 поз.4 устройства позиционирования гироприбора в пространстве поз.1 над плитой опорной базы поз.15 и разворачиваем устройство позиционирования гироприбора в пространстве поз.1 таким образом, чтобы опора поз.11 устройства позиционирования гироприбора в пространстве поз.1 была размещена над приемной опорой поз.17 опорной базы поз.15, а опора поз.10 устройства позиционирования гироприбора в пространстве поз.1 находилась бы над приемной опорой поз.16 опорной базы поз.15.
После чего осторожно опускаем устройство позиционирования гироприбора в пространстве поз.1 на опоры поз.16 и поз.17 опорной базы поз.15.
Устанавливаем на куб-призму два контрольных уровня, при этом плоскость, определена платиками, на которые установлены контрольные уровни, перпендикулярна опорной плоскости гироприбора и параллельна плите 3 поз.5 устройства позиционирования гироприбора в пространстве поз.1.
На основании показаний уровней (при необходимости, если пузырьки ампул уровней находятся не в центре ампул) проводят регулировку положения опорной плоскости гироприбора, для чего регулируют высоту опор поз.10 и поз.11 устройства позиционирования гироприбора в пространстве поз.1. Ориентируясь на положение пузырьков уровней, установленных на куб-призме, которая также является контрольной, добиваются положения, когда в обоих контрольных уровнях пузырьки ампул будут находиться в центрах ампул этих уровней.
В этом положении ввинчивают болты опор поз.10 и поз.11 в соответствующие приемные опоры поз.16 и поз.17 опорной базы поз.15, а также ввинчивают болт поз.14, через вертикальное отверстие в шаровой опоре поз.12, в резьбовое отверстие вогнутой сферы приемного стакана поз.18 опорной базы поз.15.
После чего затягивают болты на всех перечисленных опорах требуемым усилием.
При необходимости регулировку опор поз.10 и поз.11 повторяют, добиваясь положения, когда все болты крепления устройства позиционирования гироприбора в пространстве поз.1 затянуты в приемных опорах поз.16, поз.17 и поз.18, а пузырьки ампул обоих контрольных уровней будут находиться в центрах их ампул.
Следующей операцией будет регулировка установленных в устройстве позиционирования гироприбора в пространстве поз.1 нуль-индикаторов поз.37 и поз.38, которые запоминают это полученное положение опорной плоскости гироприбора, запирая оба нуль-индикатора поз.37 и поз.38 стопорньми винтами поз.29.
Снимают с контрольной куб-призмы оба контрольных уровня.
Снимают контрольную куб-призму с технологического приспособления, снимают с опор поз.19, поз.20 и поз.21 само технологическое приспособление, повторяющее плоскость определяемую контактными поверхностями опор поз.19, поз.20 и поз.21.
Одновременно следует заметить, что плоскость, определяемая контактными поверхностями опор поз.19, поз.20 и поз.21 является опорной плоскостью испытываемого гироприбора и его установочной плоскостью.
Полученное последнее положение условно определяемое как положение №3, устанавливает, что условная плоскость YпZп, показанная на фиг.12, находится в плоскости горизонта, а ось Хп - вертикальна.
Возвращаем устройство позиционирования гироприбора в пространстве поз.1 в положение, определяемое как положение №1, принимая его за исходное. Для этого необходимо вывернуть из опор поз.16 и поз.17 через опоры поз.10 и поз.11 болты, крепящие устройство позиционирования гироприбора в пространстве поз.1 к опорной базе поз.15, полностью вывернуть болт поз.14 через шаровую опору поз.12 ввернутый в резьбовое отверстие вогнутой сферы приемного стакана поз.18, крепящий устройство позиционирования гироприбора в пространстве поз.1 к опорной базе поз.15.
Не выводя шаровую опору поз.12 из приемного стакана поз.18, за ручки-планки поз.33 и поз.34 приподнять плиту 3 поз.5 устройства позиционирования гироприбора в пространстве над плитой опорной базы поз.15 и развернуть устройство позиционирования гироприбора в пространстве поз.1 таким образом, чтобы опора поз.6 устройства позиционирования гироприбора в пространстве была бы размещена над приемной опорой поз.16 опорной базы поз.15, а опора поз.7 устройства позиционирования гироприбора в пространстве поз.1 была бы размещена над приемной опорой поз.17 опорной базы поз.15. После этого осторожно опустить устройство позиционирования гироприбора в пространстве поз.1 на опоры поз.16 и поз.17 опорной базы поз.15. Ввернуть болты опор поз.6 и поз.7 в соответствующие приемные опоры поз.16 и поз.17, опорной базы поз.15, а также болт поз.14, через вертикальное отверстие в шаровой опоре поз.12, в резьбовое отверстие вогнутой сферы приемного стакана поз.18 опорной базы поз.15. После затягивания болтов требуемым усилием на всех перечисленных опорах, проконтролировать по нуль-индикаторам поз.31 и поз.32 положение установочной плоскости гироприбора. Если отклонение пузырьков ампул обоих нуль-индикаторов не будет превышать половины деления от середины ампулы (нулевое положение), то можно считать, что устройство позиционирования гироприбора в пространстве находится в исходном для проведения точностных проверок параметров гироприбора состоянии и готово к установке гироприбора для проведения его испытаний. Само устройство позиционирования гироприбора в пространстве соответствует положению, когда плоскость XпYп - горизонтальна, а ось Zп - вертикальна, а контактные поверхности на опорах для установки гироприбора поз.19, поз.20 и поз.21, которые определяют установочную плоскость гироприбора совпадают с плоскостью горизонта.
Устройство позиционирования гироприбора в пространстве поз.1 участвует в проверке точностных параметров испытуемых гироприборов следующим образом.
Предварительные условия проверки определяют, что в исходном положении ось Yп гироприбора должна быть направлена на Север (N), а установочная плоскость должна быть горизонтальна. На практике это может быть обеспечено предварительной горизонтальностью опорной базы поз.15, а с ней и плиты 1 поз.3, устройства позиционирования гироприбора в пространстве, кроме этого необходимо выставить плиту 3 поз.5 в плоскость меридиана, что автоматически установит выставку линии опор поз.19 и поз.20 в плоскость меридиана.
Испытуемый гироприбор устанавливают на резьбовые шпильки опоры №1 под прибор поз.19, опоры №2 под прибор поз.20 и опоры №3 под прибор поз.21. Производят затяжку гаек требуемым усилием и приступают к проверкам.
Исходное положение соответствует положению №1 при котором установочная плоскость прибора, определяемая плоскостью XпYп, горизонтальна, ось Zп вертикальна, при этом ось Yп совпадает с плоскостью меридиана и направлена на Север (N).
По окончании проверок гироприбора в положении №1 производят переустановку устройства позиционирования гироприбора в пространстве поз.1 в положение №2, для чего последовательно вывинчивают крепежный болт опоры поз.6 из резьбы опоры поз.16 через опору поз.6 до того момента, когда резьба болта зайдет на резьбу опоры поз.6, затем вывинчивают болт опоры поз.7 из резьбы подвижной части приемной опоры поз.17 до того момента, когда резьба болта зайдет на резьбу опоры поз.7, а затем полностью вывинчивают болт поз.14 через шаровую опору поз.12 из резьбы вогнутой сферы приемного стакана поз.18 опорной базы поз.15.
Не выводя шаровую опору поз.12 из приемного стакана поз.18 опорной базы поз.15, за ручки-планки поз.33 и поз.34 приподнимают плиту 1 поз.3 устройства позиционирования гироприбора в пространстве поз.1 с установленным в нем и закрепленным проверяемым гироприбором поз.2 под плитой опорной базы поз.15 и разворачиваем устройство позиционирования гироприбора в пространстве поз.1 таким образом, чтобы опора поз.8 находилась под опорой поз.16 опорной базы поз.15, опора поз.9 находилась над опорой поз.17 опорной базы поз.15.
Осторожно опускают устройство позиционирования гироприбора в пространстве поз.1 с установленным в нем и закрепленным гироприбором поз.2 на опору поз.16 и опору поз.17 опорной базы поз.15.
Ввинчивают болты опор поз.8 и поз.9 в соответствующие приемные опоры поз.16 и поз.17 опорной базы поз.15. Также вставляют болт поз.14 в вертикальное отверстие шаровой опоры поз.12 и ввинчивают его в резьбовое отверстие вогнутой сферы приемного стакана поз.18 опорной базы поз.15.
Затягивают болты на всех перечисленных опорах необходимым усилием затяжки.
После затягивания болтов на всех перечисленных опорах требуемым усилием затяжки, контролируют по нуль-индикаторам поз.22 и поз.36 положение установочной плоскости гироприбора. Если отклонение пузырьков ампул обоих нуль-индикаторов не будет превышать половины от середины ампулы (нулевое положение), то можно считать, что устройство позиционирования гироприбора в пространстве находится в положении №2 для проведения точностных проверок параметров гироприбора и готово для продолжения испытаний.
Установлено условное положение №2, при котором установочная плоскость прибора, определяемая плоскостью XпYп вертикальна к плоскости горизонта и вертикально к плоскости меридиана, при этом ось Yп - вертикальна, а ось Zп направлена в сторону, противоположную направлению на Север (N).
По окончании проверок гироприбора в условном положении №2 производят переустановку устройства позиционирования гироприборов в пространстве поз.1 в условное положение №3, для чего последовательно вывинчивают крепежный болт опоры поз.8 из резьбы опоры поз.16 через опору поз.8 до того момента, когда резьба болта зайдет на резьбу опоры 8, затем вывинчивают крепежный болт опоры поз.9 из резьбы поз.17 через опору поз.9 до того момента, когда резьба болта зайдет на резьбу опоры поз.9. Затем полностью вывинчивают болт поз.14 через шаровую опору поз.12 из резьбы вогнутой сферы приемного стакана поз.18 опорной базы поз.15.
На выводе шаровую опору поз.12 из приемного стакана поз.18 опорной базы поз.15, за ручки-планки поз.33 и поз.34 приподнимают плиту 2 поз.4 устройства позиционирования гироприбора в пространстве поз.1 с установленным в нем и закрепленным проверяемым гироприбором поз.2 над плитой опорной базы поз.15 и разворачивают устройство позиционирования гироприбора в пространстве поз.1 таким образом, чтобы опора поз.10 находилась над опорой поз.16 приемной базы поз.15, а опора поз.11 находилась бы над опорой поз.17 приемной базы поз.15.
Осторожно опускают устройство позиционирования гироприбора в пространстве поз.1 с установленным в нем и закрепленным гироприбором поз.2 на опору поз.16 и опору поз.17 опорной базы поз.15.
Ввинчивают болты опор поз.10 и поз.11 в соответствующие приемные опоры поз.16 и поз.17 опорной базы поз.15. Также вставляют болт поз.14 в вертикальное отверстие шаровой опоры поз.12 и ввинчивают его в резьбовое отверстие вогнутой сферы приемного стакана поз.18 опорной базы поз.15.
Затягивают болты всех перечисленных опор с необходимым усилием затяжки.
По нуль-индикаторам поз.37 и поз.38 контролируют положение установочной плоскости гироприбора. Если отклонение пузырьков ампул обоих нуль-индикаторов не будет превышать половины деления от середины ампулы (нулевое положение), то можно будет считать, что устройство позиционирования гироприбора в пространстве находится в условном положении №3, необходимом для проведения точностных проверок параметров гироприбора и готов к продолжению испытаний.
Установлено положение №3, при котором установочная плоскость прибора, определямая плоскостью XпYп вертикальна к плоскости горизонта и вертикальна к плоскости меридиана, при этом ось Хп вертикальна, а ось Zп направлена в сторону, противоположную направлению на Север (N).
По окончании проверок гироприбора в положении №3 возвращают устройство позиционирования гироприбора в пространстве поз.1 в исходное положение, которым является положение №1.
Приведя устройство позиционирования гироприбора в пространстве поз.1 в положение №1, отвинчивают с резьбовых шпилек опор под гироприбор поз.19, поз.20 и поз.21, крепящие гироприбор поз.2 гайки и осторожно снимают испытанный гироприбор, оставляя устройство позиционирования гироприбора в пространстве поз.1 в состоянии готовности принять. к испытаниям следующий гироприбор.
Существенным результатом использования предлагаемого способа и реализующего этот способ устройства, является то, что в процессе проверок гироприбор не переставляется, а также не настраиваются каждый раз его положения, необходимые для проведения его точностных испытаний. Необходимые для проверок ориентации прибора жестко связаны между собой и не требуют никаких дополнительных настроек, кроме установки различными своими гранями, с установленным внутри многогранного пространственного угла гироприбором, на опорную базу поз.15.
Способ устранения зоны нечувствительности в волоконно-оптическом гироскопе
Радиационно-стойкий световод для волоконно-оптического гироскопа
Оптическая схема кольцевого интерферометра для снижения поляризационной ошибки в волоконно-оптическом гироскопе
Высокотемпературная установка для термической переработки твердых медицинских отходов
Акселерометр
Оптическая схема кольцевого интерферометра волоконно-оптического гироскопа
Испытательный стенд
Испытательный стенд
Способ уменьшения времени точностной готовности волоконно-оптического гироскопа
Способ получения наноструктурного фталоцианинового катализатора демеркаптанизации нефти и газоконденсата
Способ устранения зоны нечувствительности в волоконно-оптическом гироскопе
Радиационно-стойкий световод для волоконно-оптического гироскопа
Оптическая схема кольцевого интерферометра для снижения поляризационной ошибки в волоконно-оптическом гироскопе
Акселерометр
Оптическая схема кольцевого интерферометра волоконно-оптического гироскопа
Испытательный стенд
Испытательный стенд
Способ уменьшения времени точностной готовности волоконно-оптического гироскопа
Способ получения наноструктурного фталоцианинового катализатора демеркаптанизации нефти и газоконденсата
Способ получения тетрафторбората лития

