Результат интеллектуальной деятельности: СИСТЕМА СЛЕЖЕНИЯ ЗА СОЛНЦЕМ ФОТОЭНЕРГОУСТАНОВКИ
Вид РИД
Изобретение
Изобретение относится к устройствам солнечной энергетики и может найти применение при конструировании и изготовлении установок с фотоэлектрическими модулями, требующими как одноосного, так и двухосного слежения за солнцем. В частности, к таким установкам относятся станции, использующие многокаскадные наногетероструктурные фотопреобразователи на основе соединений A3B5 с концентраторами солнечной энергии.
Несмотря на различные схемы установок с приводами слежения (трекеров), общим для них является наличие системы контроля пространственного положения панели солнечных модулей в режиме реального времени.
Известна конструкция фотоэлектрической установки с двухосным слежением за Солнцем (см. патент US 4332238, МПК F24J 3/02, опубликован 01.06.1982), состоящая из концентраторного фототоэлектрического модуля и системы приводов слежения. В качестве концентратора солнечного излучения используется параболическое зеркало, смонтированное на вертикальной раме, которая приводится во вращение вокруг горизонтальной оси при помощи электродвигателя с редуктором. Рама закреплена на основании в виде диска, по периметру которого расположен шестеренчатый венец, входящий в зацепление с малой шестерней электропривода. Снизу диск насажен на вертикальную ось, вокруг которой может поворачиваться вся конструкция. Для ограничения азимутального и зенитального углов поворота используют концевые выключатели, расположенные непосредственно на самом диске.
Такое техническое решение имеет существенный недостаток при размещении установки на широтах, вблизи экватора Земли. Действительно, каждые полгода установка следит за Солнцем, вращаясь в азимутальном направлении в пределах двух взаимно противоположных секторов: половину года в пределах сектора, средняя линия которого ориентирована на юг, и другую половину года в пределах сектора, средняя линия которого ориентирована на север. Границы секторов перекрываются из-за годичного изменения траектории движения Солнца по небосводу. В связи с тем, что установка не может поворачиваться на угол более 360° за один проход, что связано с опасностью повреждения и обрыва кабеля, по которому отводится генерируемая электрическая энергия, то требуется дважды в год менять положение концевых выключателей азимутального сектора.
Известна система слежения за Солнцем фотоэнергоустановки (см. патент US 6005236, МПК G01J 1/20, опубликован 21.12.1999), которая включает в себя раму с возможностью поворота вокруг горизонтальной оси, U-образную подставку, расположенную на вертикальной оси, однотипные приводные узлы по каждой из осей и систему управления оптимальным направлением панели на Солнце. Система управления состоит из канала грубого наведения и двух каналов точного наведения, каждый из которых следит за соответствующим углом поворота зенитальной и азимутальной осей. Грубое наведение осуществляется по известным координатам солнца, а окончательная подстройка осуществляется двумя независимыми электроприводами по максимуму сигнала с оптических датчиков, закрепленных каждый на своей оси вращения. Ограничение предельных углов поворота осей осуществляется по одной и той же схеме и достигается с помощью концевого выключателя и стойки, расположенной на шестерне, приводящей во вращение соответствующую ось.
Недостатком известной системы слежения является необходимость перенастройки системы ограничения предельного азимутального угла каждые полгода, при размещении станции на широтах вблизи экватора Земли.
Известна система слежения за Солнцем фотоэнергоустановки (см. патент US 7202457, МПК F24J 2/38, опубликован 10.04.2007). Привод этого устройства является двухосным и состоит из нижней платформы с червячной передачей, осуществляющей вращение вокруг вертикальной оси (азимутальный угол), и верхней платформы, несущей солнечные элементы. Эта платформа выполнена в виде прямоугольной рамы и одной своей стороной шарнирно закреплена на нижнем основании. Вращение вокруг этой оси (зенитальный угол) осуществляется с помощью зубчатого сектора, жестко связанного с этой рамой, и ответной шестерни, закрепленной на валу электродвигателя.
Недостатком известной системы слежения является расположение концевых выключателей азимутального угла непосредственно на самом секторе привода нижней платформы, причем внутри ее основания. Это приводит к большим трудозатратам при необходимости изменения предельных углов поворота азимутальной оси.
Известна система слежения за Солнцем фотоэнергоустановки (см. заявку RU 2007139419, МПК F24J 2/52, опубликованную 27.04.2007). Поворотное устройство содержит вертикальную опору на фундаменте, на которой расположена система поворота по азимуту. Слежение по этому углу осуществляется с помощью вращающегося винта и качающейся гайки (аналог линейного актуатора). Привод устройства содержит мотор с редуктором и предохранительную фрикционную муфту. При таком способе решения задачи ограничения предельного угла поворота платформы концевые выключатели не требуются. Однако, в случае достижения предельных значений углов, мотор-редуктор продолжает работать и потреблять энергию, что в длительном режиме приводит к его перегреву и последующему выходу из строя. Таким образом, для реального функционирования такой конструкции требуется дополнительная система контроля работы мотор-редуктора, которая отключала бы последний при срабатывании фрикционной муфты, что усложняет схему всего устройства.
Наиболее близким по совокупности существенных признаков к настоящему решению является система слежения за Солнцем фотоэнергоустановки (см. патент RU 2354896, МПК F24J 2/42, опубликован 10.05.2007). Система-прототип содержит систему контроля положения Солнца и конструкцию зенитального и азимутального приводов платформы. Подсистема азимутального вращения выполнена в виде неподвижного основания с трубой, на которую с помощью конического подшипника навешена вторая труба большего диаметра. Нижний конец этой трубы заканчивается двуплечим рычагом, на одном конце которого закреплен первый редуктор на валу первого привода. Ведомой шестерней первого редуктора является горизонтальный диск с рифленой поверхностью, закрепленный на неподвижном основании. На верхнем конце трубы закреплена горизонтальная труба, на которой с возможностью вращения установлена подсистема зенитального вращения, выполненная в виде пространственной рамы с прикрепленными снизу к раме двумя вертикальными секторами с цепями по торцам, выполняющими функцию ведомой шестерни второго редуктора, закрепленного на валу второго привода. Для ограничения предельных углов в этой конструкции используют концевые выключатели, расположенные непосредственно как на горизонтальном диске, так и на вертикальном секторе.
Недостатком конструкции системы-прототипа является необходимость изменения положения азимутальных выключателей, по крайней мере, два раза в году, применительно к случаю размещения установки вблизи экватора Земли.
Задачей настоящего изобретения являлась разработка такой системы слежения за Солнцем фотоэнергоустановки, которая, во-первых, была бы единым компактным блоком для азимутальной и зенитальной осей вращения и, во-вторых, не требовала бы перенастройки ограничителей предельных углов, независимо от географического места расположения установки на земном шаре.
Поставленная цель достигается тем, что система слежения за Солнцем фотоэнергоустановки включает подсистему азимутального вращения и подсистему зенитального вращения. Подсистема азимутального вращения выполнена в виде неподвижной стойки, по центру которой закреплен горизонтальный диск с рифленой поверхностью, являющийся ведомой шестерней первого редуктора, вращаемого валом первого привода с передаточным отношением Iаз. На торец стойки надета с возможностью вращения труба, на верхнем конце трубы закреплена горизонтальная ось, на которой с возможностью вращения установлена подсистема зенитального вращения. Подсистема зенитального вращения выполнена в виде пространственной рамы и прикрепленных снизу к раме двух вертикальных секторов с рифлеными круговыми торцевыми поверхностями, выполняющими функцию ведомой шестерни второго редуктора, вращаемого валом второго привода с передаточным отношением Iзен. На нижнем конце трубы закреплен двуплечий рычаг, на котором установлены первый и второй приводы. Вал первого привода соединен с третьим редуктором с передаточным отношением iаз, а вал второго привода соединен с четвертым редуктором с передаточным отношением iзен. На ведомых шестернях третьего и четвертого редукторов закреплены по два кулачка, разнесенных по окружностям и взаимодействующих с неподвижными концевыми выключателями, изменяющими на противоположное (останавливающими) вращение соответственно первого и второго приводов. Передаточные отношения Iаз, Iзен, iаз и iзен удовлетворяют соотношениям:
1,3 Iаз≤iаз<2 Iаз;
0,3 Iзен≤iзен<Iзен.
Ведомые шестерни третьего и четвертого редукторов могут быть снабжены датчиками угла поворота.
В качестве датчика угла поворота использован, например, абсолютный 10-битный магнитный энкодер.
Новым в системе является соединение вала силового первого привода с измерительным третьим редуктором с передаточным отношением iаз, а вала силового второго привода - с измерительным четвертым редуктором с передаточным отношением iзен, на ведомых шестернях которых закреплены по два кулачка, разнесенных по окружностям и взаимодействующих с неподвижными переключателями, изменяющими вращение соответственно первого и второго приводов. При этом передаточные отношения Iаз, Iзен, iаз и iзен удовлетворяют указанным выше соотношениям. Выбор интервалов соотношений обусловлен следующим. Поскольку концевые выключатели и сами кулачки имеют конечные физические размеры и, кроме того, их крепление должно обеспечивать возможность некоторого перемещения для точной настройки углов срабатывания, то при iаз, меньшем 1,3 Iаз, расположение концевого выключателя при вращении трекера в одну сторону будет мешать расположению другого концевого выключателя, отвечающего за предельный угол при вращении платформы в другую сторону, а при iаз, равном или большем 2 Iаз, возможен поворот выходной шестерни измерительного канала на угол 360° или более, что не позволит физически расположить на ней кулачки выключателей. Аналогично и для зенитального канала, с той лишь разницей, что измерительный редуктор в это случае является повышающим. Так при iзен, равном или большем Iзен, расположение концевых выключателей будут находиться примерно в одном месте платы редуктора, что физически невозможно сделать, а при iзен, меньшем 0,3 Iзен, возможен поворот выходной шестерни измерительного редуктора на угол, близкий к 360°, и, соответственно, невозможно стационарно расположить выключатели.
Такое конструктивное выполнение системы, при выполнении указанного выше соотношения для передаточных отношениий Iаз, Iзен, iаз и iзен, позволяет перенести концевые выключатели от горизонтального диска подсистемы азимутального вращения и от вертикальных секторов подсистемы зенитального вращения к ведомым шестерням соответственно третьего и четвертого редукторов. При выполнении указанных выше соотношений для передаточных отношениий Iаз, Iзен, iаз и iзен появилась возможность стационарного закрепления кулачков, приводящих в действие концевые выключатели предельных углов поворотов азимутальной и зенитальной осей системы слежения, даже для случая расположения фотоэнергоустановки на экваториальных широтах. Действительно, несмотря на то, что на экваторе фотоэнергоустановка половину года вращается вокруг вертикальной оси на 180° в одну сторону, а в другую половину года на 180° в другую сторону, то есть в общем случае поворот осуществляется на 360°, ведомая шестерня третьего редуктора, на которой закреплены кулачки, взаимодействующие с концевыми выключателями, поворачивается на углы, не превышающие 360°, что и позволяет закрепить кулачки стационарно на весь период эксплуатации фотоэнергоустановки (в отличие от азимутального, угол зенитального поворота не превышает 90°). В результате отпадает необходимость два раза в год менять положение переключателей, так как возможно отключение приводов при любых углах поворота подсистемы азимутального вращения и подсистемы зенитального вращения, в том числе при повороте подсистемы зенитального вращения на угол 90° и при повороте подсистемы азимутального вращения на угол, превышающий 360°, что имеет место на широтах, приближенных к экватору Земли.
Настоящее изобретение поясняется чертежом, где:
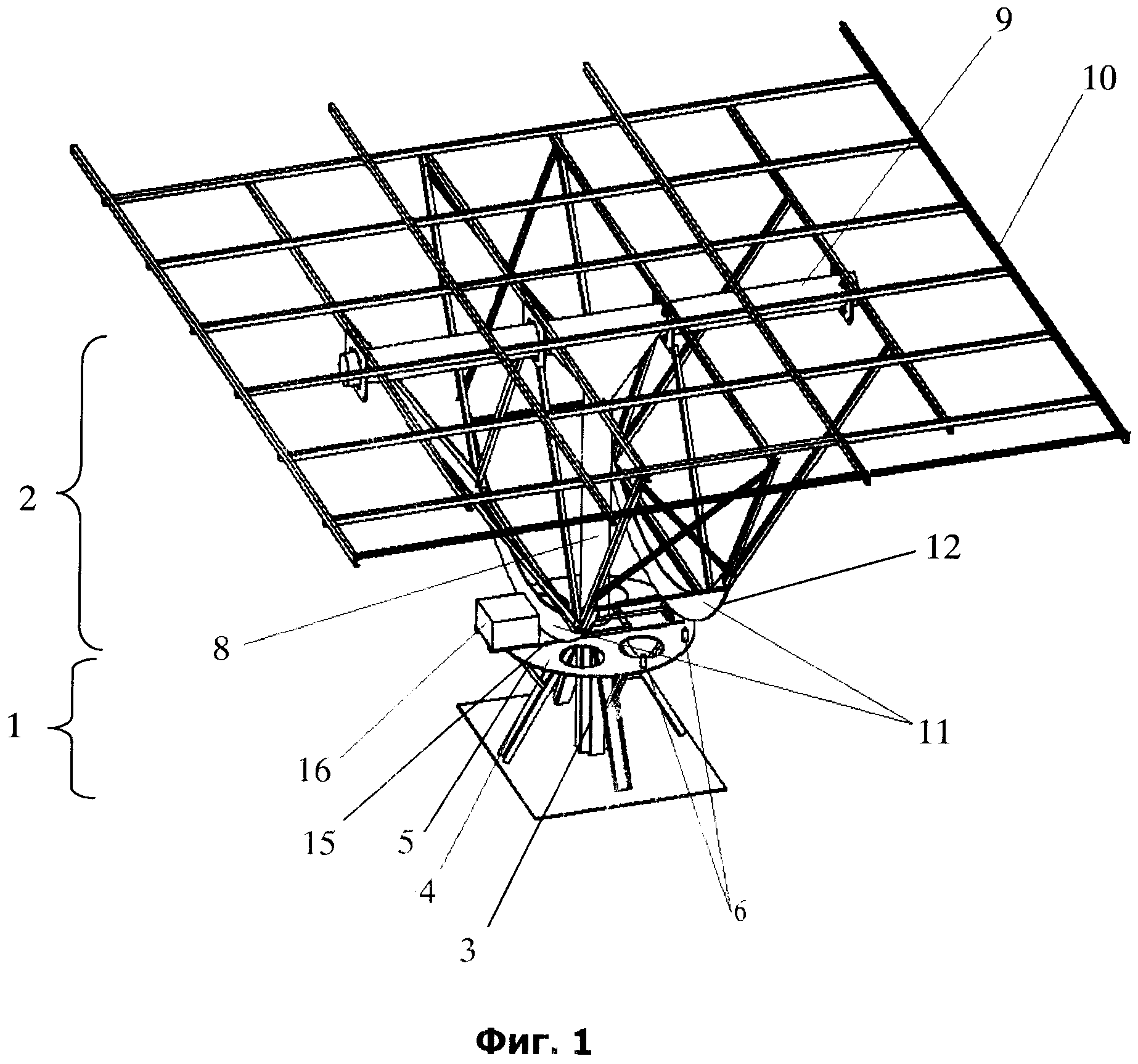
на фиг.1 показан в аксонометрии пример фотоэнергоустановки с системой слежения за Солнцем;
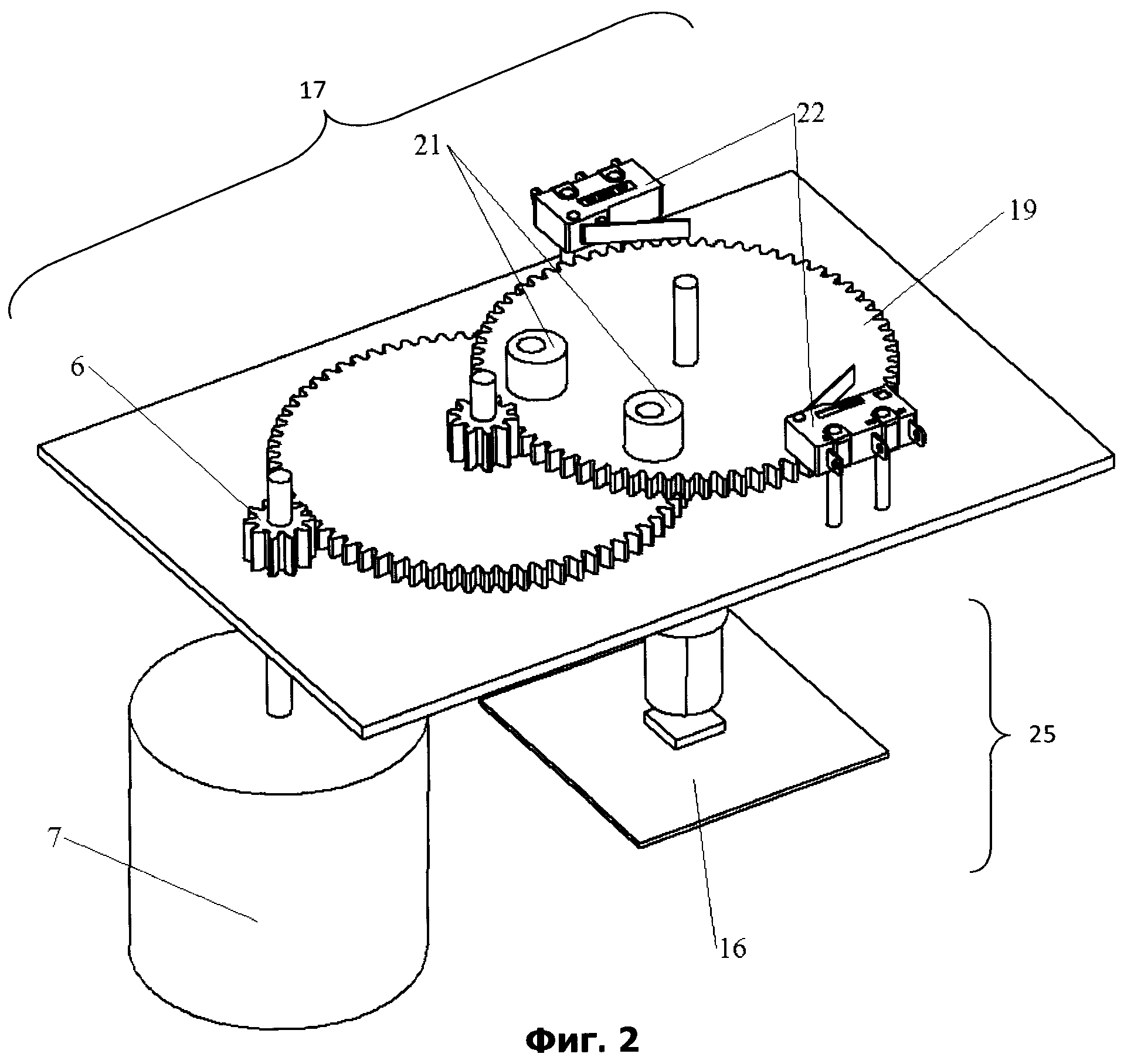
на фиг.2 приведен в аксонометрии пример третьего редуктора с кулачками на ведомой шестерне, с неподвижными концевыми выключателями и датчиком угла поворота;
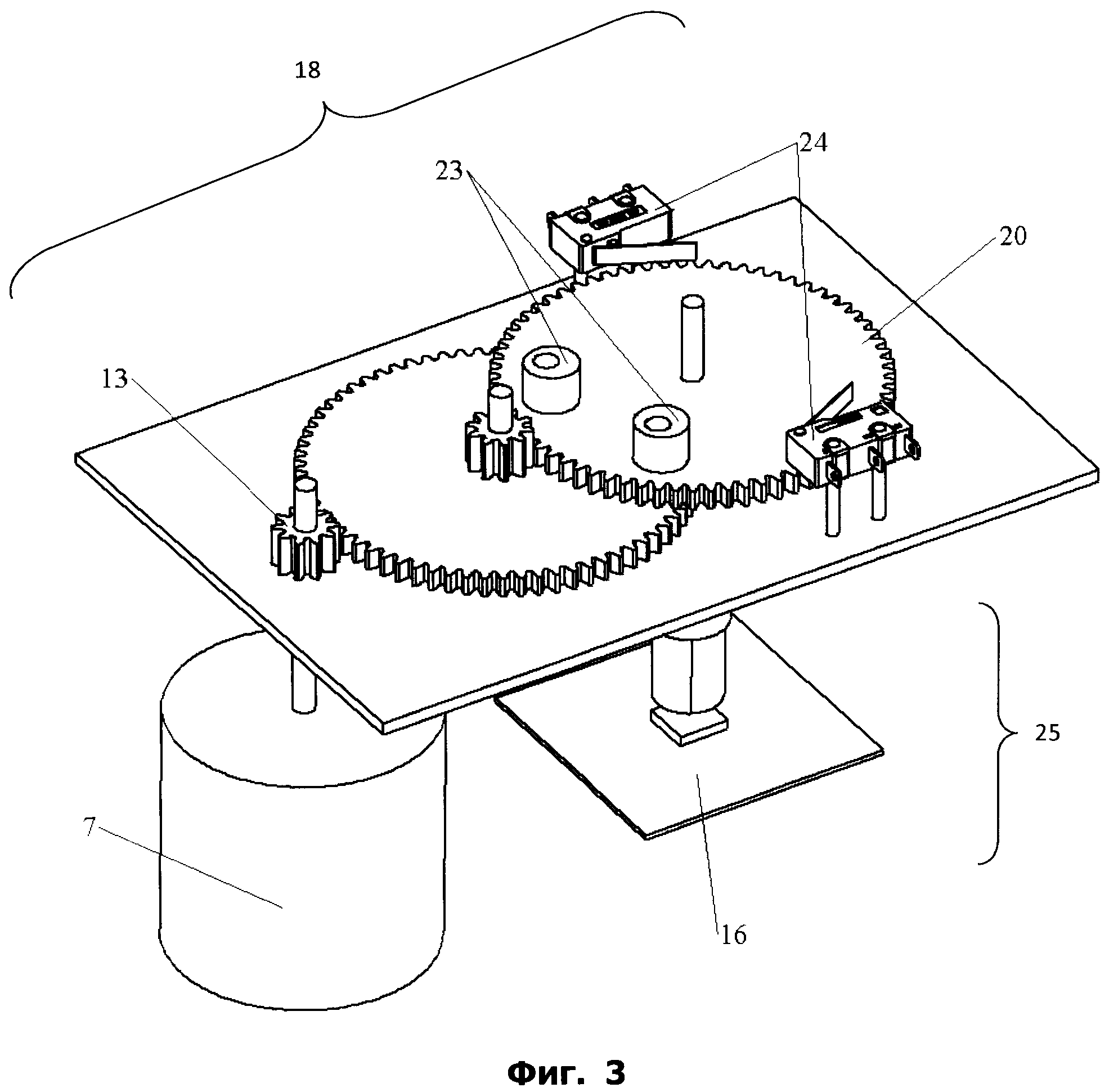
на фиг.3 приведен в аксонометрии пример четвертого редуктора с кулачками на ведомой шестерне, с неподвижными концевыми выключателями и датчиком угла поворота.
Система слежения за Солнцем фотоэнергоустановки включает (см. фиг.1) подсистему 1 азимутального вращения и подсистему 2 зенитального вращения. Подсистема 1 азимутального вращения выполнена в виде неподвижной стойки 3, по центру которой закреплен горизонтальный диск 4 с рифленой поверхностью 5, являющийся ведомой шестерней первого редуктора (на чертеже не показан), вращаемого валом 6 первого привода 7 (см. фиг.2) с передаточным отношением Iаз. На торец стойки 3 надета с возможностью вращения труба 8, на верхнем конце трубы 8 закреплена горизонтальная ось 9, на которой с возможностью вращения установлена подсистема 2 зенитального вращения. Подсистема 2 зенитального вращения выполнена в виде пространственной рамы 10 и прикрепленных снизу к раме 10 двух вертикальных секторов 11 с рифлеными круговыми торцовыми поверхностями 12, являющимися ведомыми шестернями второго редуктора (на чертеже не показан), вращаемого валом 13 второго привода 14 с передаточным отношением Iзен. (см. фиг.3). На нижнем конце трубы 8 закреплен двуплечий рычаг 15, на котором установлены первый привод 7 и второй привод 14, размещенные в корпусе 16. Вал 6 первого привода 7 также соединен с третьим редуктором 17 с передаточным отношением iаз, а вал 13 второго привода 14 соединен с четвертым редуктором 18 с передаточным отношением iзен. На ведомой шестерне 19 третьего редуктора 17 закреплены два кулачка 21, разнесенных по окружности и взаимодействующих с неподвижными концевыми выключателями 22, переключающими (отключающими) электропитание первого привода 7. На ведомой шестерни 20 четвертого редуктора 18 закреплены два кулачка 23, разнесенных по окружностям и взаимодействующих с неподвижными концевыми выключателями 24, закрепленными на основании корпуса 16 и отключающими электропитание второго привода 14. Передаточные отношения Iаз, Iзен, iаз и iзен удовлетворяют соотношениям:
1,3 Iаз≤iаз<2 Iаз;
0,3 Iзен≤Iзен<Iзен.
В качестве датчика угла поворота в обоих каналах может быть использован, например, абсолютный 10-битный магнитный энкодер 25. Для этого на нижнем торце ведомой шестерни 19 третьего редуктора 17 и ведомой шестерни 20 четвертого редуктора 18 расположены магниты энкодера, намагниченные таким образом, что силовые линии перпендикулярны оси вращения шестерен 19 и 20. Поле этих магнитов энкодера 25 взаимодействует с микросхемой Холла энкодера 25, закрепленной на основании корпуса 16 (см. фиг.1).
Система слежения за Солнцем фотоэнергоустановки работает следующим образом. Первый привод 7, размещенный в неподвижном относительно стойки 8 корпусе 16, через первый редуктор вращает вокруг вертикальной оси неподвижной стойки 3 пространственную раму 10, на которой располагаются солнечные модули (не показаны), поворачивая пространственную раму 10 в азимутальном направлении с передаточным отношением Iаз. Одновременно первый привод 7 вращает третий редуктор 17 с ведомой шестерней 19 при передаточном отношении iаз, удовлетворяющем соотношению: 1,3 Iаз≤iаз<2 Iаз. При таком соотношении Iаз и iаз при повороте пространственной рамы 10 вокруг вертикальной оси на угол 360°, ведомая шестерня 19 поворачивается на угол 180°-280°. В результате закрепленные на ведомой шестерне 19 и разнесенные по окружности кулачки 21 могут взаимодействовать с неподвижными концевыми выключателями 22 при предельном повороте пространственной рамы 10 в азимутальном направлении на угол несколько больший, чем 360°. Второй привод 14 через второй редуктор поворачивает раму 10 вокруг горизонтальной оси 9 в зенитальном направлении с передаточным отношением Iзен. Одновременно второй привод 14 вращает четвертый редуктор 18 с ведомой шестерней 20 при передаточном отношении iзен, удовлетворяющем соотношению: 0,3 Iзен≤iзен<Iзен. При таком соотношении Iаз и iаз при повороте пространственной рамы 10 вокруг горизонтальной на угол 90°, ведомая шестерня 20 поворачивается на угол 90°-280°. В результате закрепленные на ведомой шестерни 20 и разнесенные по окружности в пределах сектора 90°-280° кулачки 23 будут взаимодействовать с неподвижными концевыми выключателями 24 при предельном повороте пространственной рамы 10 в зенитальном направлении до 90°.
Такое конструктивное решение, ограничивающее предельные углы поворота осей системы слежения за Солнцем, является универсальным и позволяет располагать солнечную энергоустановку в любой точке земного шара, в том числе и в экваториальной зоне. Действительно, в случае размещения станции на экваторе, азимутальный угол поворота превышает 360 градусов, что не позволяет традиционным системам аварийного отключения приводов использовать концевые выключатели без их сезонной перенастройки. Отметим, что конструктивно третий и четвертый измерительные редукторы идентичны и различаются только передаточными отношениями. Это создает дополнительные удобства при монтаже и обслуживании.
Снабжение ведомых шестерней 19, 20 соответственно третьего редуктора 17 и четвертого редуктора 18 датчиками угла поворота, в качестве которого может быть использован, например, абсолютный 10-битный магнитный энкодер 25 на основе эффекта Холла, позволяет измерять абсолютные значения углов азимутального и зенитального поворотов в режиме реального времени с точностью до 0,1°.
Конструкция фотоэлектрического модуля
Солнечная концентраторная фотоэлектрическая установка
Солнечная фотоэнергоустановка
Способ предэпитаксиальной обработки поверхности германиевой подложки
Способ изготовления фотовольтаического преобразователя
Способ изготовления чипов наногетероструктуры и травитель
Способ изготовления чипов многослойных фотоэлементов
Способ изготовления чипов каскадных фотоэлементов
Фотоэлектрический концентраторный субмодуль
Концентраторный каскадный фотопреобразователь
Катализатор для получения сверхвысокомолекулярного полиэтилена
Способ получения хлопчатобумажной ткани технического назначения с комплексом защитных свойств от кислот и нефтепродуктов
Координатный стол
Стенд для контроля точности контурных перемещений промышленного робота
Эпоксиполиэфирная лакокрасочная композиция
Способ сбора штормовых выбросов морских водорослей
Фотохромная регистрирующая среда для трехмерной оптической памяти
Устройство для преобразования изменения сопротивления в напряжение
Устройство для защиты емкостного накопителя энергии
Катализатор, способ его приготовления и способ получения β-пиколина

