Результат интеллектуальной деятельности: СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области космической техники и может быть использовано для управления движением центра масс космического аппарата (КА) при сопровождении этим космическим аппаратом другого космического аппарата на заданном расстоянии.
1. Известен «Способ одновременной коррекции удержания вектора наклонения орбиты и периода обращения трехосностабилизированного космического аппарата» (RU 2381965, МПК B64G 1/24), включающий проведение коррекций, отличающийся тем, что определяют требуемый угол отклонения вектора тяги двигателя от нормали к орбите в плоскости рысканья исходя из обеспечения заданной точности исполнения коррекции периода обращения космического аппарата и требуемых изменений за коррекцию трансверсальной и ортогональной составляющих вектора скорости космического аппарата, задают отклонения направлений векторов тяги двигателей, рассчитывают длительности работы двигателей по формулам

где τ1, τ2 - длительности работы двигателей, с;
Jn, Jτ - импульсы тяги, требуемые для коррекций соответственно вектора наклонения орбиты и периода обращения КА, Н·с;
F1, F2 - тяги двигателей, Н;
θ1, θ2 - углы отклонения векторов тяги двигателей от нормали к плоскости орбиты в плоскости рысканья по наименьшей дуге,
и проводят коррекцию парой двигателей, установленных по разные стороны от нормали к орбите, для чего производят последовательно их включения на расчетные длительности работы. При этом выполняется следующая последовательность операций (все угловые величины выражены в радианах).
1. Определяют требуемый угол (θ) отклонения вектора тяги двигателя от нормали к орбите исходя из обеспечения заданной точности исполнения коррекции периода обращения КА и требуемых изменений за коррекцию трансверсальной и ортогональной составляющих вектора скорости КА.
Величину угла θ рассчитывают по формуле
где θ - острый угол отклонения двигателей по разные стороны от нормали к орбите в плоскости рысканья;
ввиду того, что 
следует
δθ - погрешность, с которой поддерживается положение КА в плоскости рысканья относительно центра масс;
δθτ - задаваемая максимальная относительная погрешность реализации корректирующего импульса на изменение периода обращения КА;
ΔVτ - требуемое максимальное изменение за коррекцию трансверсальной составляющей вектора скорости КА в течение срока его активного существования, м/с;
ΔVn - требуемое изменение за коррекцию ортогональной составляющей вектора скорости КА, соответствующее расчетному максимальному изменению вектора наклонения  (составляющие вектора наклонения ix=sin(i)·cos(Ω); iy=sin(i)·sin(Ω), Ω-долгота восходящего узла орбиты), м/с.
(составляющие вектора наклонения ix=sin(i)·cos(Ω); iy=sin(i)·sin(Ω), Ω-долгота восходящего узла орбиты), м/с.
Следует отметить, что способ не требует угловых разворотов КА. Двигатели устанавливаются конструктивно под заранее рассчитанными углами θ1 и θ2.
2. Задают отклонения направлений векторов тяги двигателей.
Устанавливают по два двигателя относительно обеих полуосей нормали к орбите. Направления векторов тяги двигателей сейчас задают отклонениями от нормали к орбите в плоскости рысканья на углы «+θ» и «-θ». В общем случае модули этих углов могут быть не равны.
3. Юстируют направление векторов тяги двигателей.
При установке двигателей на КА под углами «+θ» и «-θ» за направление вектора тяги двигателя принимается геометрическая ось двигателя. Однако за счет погрешности установки двигателя и отклонения фактического направления вектора тяги двигателя от его геометрической оси, фактические углы направления векторов тяги отличаются от расчетных. Поэтому производится юстировка, при которой определяют фактические углы отклонения векторов тяги двигателей от нормали. Для проведения юстировки включают поочередно двигатели и после каждого включения проводят траекторные измерения. По изменению параметров орбиты и определяют фактические углы θ1 и θ2 соответственно для первого и второго двигателей каждой из полуосей нормали к орбите. Например, для геостационарной орбиты углы θ1 и θ2 можно определить по формуле
где µ - гравитационный параметр Земли, км3/с2;
ΔТ - изменение периода обращения КА за счет работы двигателя (определяется по результатам траекторных измерений), с;
R - радиус номинальной геостационарной орбиты КА, км;
а - ускорение, создаваемое двигателем, км/с2;
τ - длительность работы двигателя, с.
4. Рассчитывают длительности работы двигателей.
Сумма проекций импульсов тяг первого и второго двигателей на нормаль к орбите должна быть равна требуемому импульсу на проведение коррекции вектора наклонения орбиты, т.е.

С другой стороны, разность проекций импульсов тяг первого и второго двигателей на трансверсаль должна быть равна требуемому импульсу на проведение коррекции периода обращения КА, т.е.

Решая совместно уравнения (1) и (2) относительно τ1 и τ2, получаем
5. Проводят коррекцию парой двигателей.
Коррекции проводят последовательным включением первого двигателя на τ1 секунд и второго двигателя на τ2 секунд.
Импульсы Jn, Jτ определяются стратегией реального удержания КА по известным формулам, например, П.Е.Эльясберг, «Введение в теорию полета ИСЗ», М., Наука, 1965 г.
 ,
,
где Jτ - требуемый импульс на проведение коррекции периода обращения КА, кг·км/с;
m - масса КА, кг;
ΔV - приращение скорости, км/с;
µ - гравитационный параметр Земли, км3/с2;
ΔТ - требуемое изменение периода обращения за коррекцию, с;
R - радиус номинальной геостационарной орбиты, км,
а также Г.М.Чернявский, В.А.Бартенев, В.А.Малышев, «Управление орбитой стационарного спутника», М., Машиностроение, 1984 г., стр.129, 138. Моменты включений двигателей определяются из условия, чтобы середина интервала работы двигателей соответствовала точке оптимального приложения импульсов. При непрерывной коррекции двумя двигателями на геостационарной орбите можно воспользоваться следующими рабочими формулами (все угловые величины выражены в радианах):
 ;
;
 ,
,
где t0 - некоторое начальное время, секунды от опорной эпохи;
αвкл=arctg [Δiy·sign(a z)/ Δix·sign(a z)] - прямое восхождение середины активного участка;
Δiy, Δix - требуемые составляющие изменения вектора наклонения  в координатах:
в координатах:
ix=sin(i)·cos(Ω);
iy=sin(i)·sin(Ω);
Ω - долгота восходящего узла орбиты КА;
a z - ортогональное ускорение, км/с2;
 - отклонение от точки «стояния» в момент t0;
- отклонение от точки «стояния» в момент t0;
S0 - среднее гринвичское звездное время в момент t0;
λст - долгота «стояния» КА - центр орбитальной позиции;
n - среднее движение КА, с-1;
Vcp - средняя орбитальная скорость, км/с.
Приведенный «Способ одновременной коррекции удержания вектора наклонения орбиты и периода обращения трехосностабилизированного космического аппарата» на сегодня является основным вариантом стратегии удержания КА на заданной орбитальной позиции. Он успешно применяется для решения задачи коллокации, т.е. сосуществования без взаимных помех двух и более КА в узкой области удержания, но с его помощью невозможно сопровождение КА-субъектом КА-объекта на вполне определенном заданном отдалении.
2. Известен способ планирования коррекций, изложенный в рабочей документации предприятия, например, в 757А.ИЭ87. Космический аппарат «Луч-5А», Инструкция по баллистическому обеспечению [1], как часть общей технологической наземной циклограммы решения баллистических задач (циклограмма приведена в приложении, где ГКА - геостационарный КА), который и взят за прототип. В способе-прототипе выполняется следующая последовательность операций (несущественные детали опускаются, курсивом выделены отличия наземной циклограммы от циклограммы, реализованной на борту КА).
1. Отрабатывается план коррекций бортовой системой навигации и управления движением.
Коррекции, согласно плану, проводят 2 двигателями коррекции на 2-суточном интервале (1 двигатель - 1 сутки), либо 2 двигателями на суточном интервале.
2. Проводят траекторные измерения.
Траекторные измерения представляют собой штатный цикл измерений текущих навигационных параметров (ИТНП), количество сеансов измерений и количество интервалов между сеансами составляет для суточного интервала и наличии двух пунктов наземных измерений от 4 до 6. При наличии автономной (бортовой) радионавигации траекторные измерения ведутся в непрерывном режиме.
3. Выполняют программу определения параметров движения центра масс КА.
Операция заключается в определении положения КА в инерциальном пространстве.
4. Уточняют управляющие ускорения по изменению орбитальных параметров.
Уточнение не позволяет определять управляющие ускорения, точнее диапазона значений ускорений, оговоренных заводом-изготовителем. Оно гарантирует отслеживание аномальной работы двигателей коррекции, и, в случае затяжной, и, возможно, постоянной ситуации, когда (пока) отказ двигателя коррекции не зафиксирован на борту КА, все-таки рассчитывать план коррекций. При уточнении применяется эвристический метод: есть начальные условия (НУ) движения по предыдущему ИТНП, есть текущие НУ согласно п.п.1-3, есть предыдущий план коррекций, включающий в себя до трех условных номеров двигателей коррекции, решается задача прихода в текущие НУ без больших погрешностей по контролируемым параметрам движения.
5. Выполняют программу расчета параметров коррекций КА в окрестности орбитальной позиции на интервале от даты расчета до начала следующего штатного цикла ИТНП. При наличии бортовых траекторных измерений план коррекций составляется на суточный интервал времени.
При расчете параметров коррекций придерживаются выбранной стратегии управления движением центра масс КА, отражающейся в выборе или пролонгации точек «прицеливания». Для простого удержания в заданной области по долготе КА и наклонению орбиты КА точками «прицеливания» являются центр орбитальной позиции по долготе и оптимальным образом выбранная точка на фазовой плоскости [i; Ω]. Выбранная стратегия не предполагает прямого нацеливания да данные точки, но запускает алгоритм долгосрочного планирования с целью невыхода КА из области по долготе и из области заданного радиуса ε относительно выбранной точки на плоскости [i; Ω]. Для нужд коллокации (удержания нескольких КА в заданной узкой области) точкой «прицеливания» дополнительно к перечисленным является также точка на фазовой плоскости [е - эксцентриситет орбиты КА; π - долгота перицентра орбиты КА]. Обычно требуется простая минимизация эксцентриситета.
6. Выполняют программы генерации массивов командно-программной информации (КПИ), содержащих НУ (вектор кинематических параметров движения), план коррекций, проекции ускорений от двигателей коррекции на оси связанной с КА системы координат.
7. Засылка обобщенной формы КПИ на борт КА.
Далее п.п.1-7 повторяются в течение всего времени работы КА по целевому назначению. Эта схема [1] баллистического обеспечения полета КА универсальна.
Недостатком прототипа [1], как и способа-аналога, является неспособность синхронного сопровождения одного КА другим КА на определенном расстоянии с заданной точностью. Следует отметить, что синхронное сопровождение аппарата аппаратом через посредство типовых траекторных измерений (наземных или бортовых), обусловленных типовыми работами космического комплекса (в отношении КА-объекта возможны наземные оптические наблюдения), не приносит должного результата из-за запаздывания реакций управления КА-субъектом на неизвестную стратегию управления КА-объектом. Ухудшается качество собственного удержания КА и неразумно повышаются энергозатраты системы коррекции для обеспечения функционирования КА по целевому назначению (обоснование топливного бюджета не входит в основную цель изобретения, потому - только упоминание о повышении энергозатрат, поскольку это очевидно, можно считать достаточным).
Целью изобретения является создание способа адаптивного управления движением центра масс КА, отвечающего всем точностным требованиям к сопровождению КА-объекта и уменьшение энергозатрат системы коррекции КА.
Поставленная цель достигается тем, что в способе удержания геостационарного КА на заданной орбитальной позиции, включающем проведение траекторных измерений, определение положения КА-субъекта в инерциальном пространстве, расчет параметров коррекции в зависимости от отклонения корректируемого параметра от номинального значения, приложение корректирующего воздействия к корпусу КА путем включения двигателя, введены новые операции, заключающиеся в том, что на борту КА устанавливают и придают системе навигации и управления движением комплект приемо-передающей радиоаппаратуры и оптический датчик углов «Полярная звезда-Субъект-Объект»; антенну и датчик устанавливают так, чтобы их геометрические оси совпадали с трансверсальным направлением; проводят непрерывные измерения дальностей до КА-объекта в течение времени, пока наибольшие проекции панели солнечных батарей на плоскость, ортогональную к линии визирования «Субъект-Объект», больше длины волны излучения антенны; на каждом шагу измерений осредняют дальности до объекта в привязке к выбранным моментам шагов; на момент окончания каждого цикла, включающего шаги измерений, выявляют динамику изменения этих величин и вычисляют оскулирующий период (большую полуось орбиты) КА-объекта; определяют приращение оскулирующего перида обращения КА-субъекта к соответствующему оскулирующему периоду обращения КА-объекта; определяют за оборот угол между плоскостями орбит объекта и субъекта и время пересечения плоскостей орбит КА по показаниям датчика углов; если приращение оскулирующего периода обращения превышает заданную величину, - оперативно рассчитывают параметры подстроечной коррекции периода обращения, и в расчетное время пересечения плоскостей орбит КА включают двигатель коррекции, отдавая приоритет двигателю коррекции наклонения, согласно векторам относительных приращений ортогональной и трансверсальной скоростей, объекта за коррекцию.
Реализация предлагаемого способа предполагает выполнение следующей последовательности операций.
1. Системе навигации и управления движением придают аппаратуру слежения (АС): комплект приемо-передающей радиоаппаратуры и оптический датчик углов «Полярная звезда-Субъект-Объект» (ПСО).
Идея предлагаемого способа сопровождения одного КА другим основана на том, что относительная близость КА-объекта позволяет получать взаимные расстояния, даже если нет активных ретрансляторов сигнала; полный набор оптических датчиков по определению местоположения КА-объекта (солнечный и звездный датчики) не требуется - для определения угла между плоскостями орбит КА и времени пересечения плоскостей орбит КА необходимо и достаточно иметь один оптический датчик углов ПСО. Датчик углов ничем не отличается, по сути, от, скажем, стандартного датчика углов «Полярная звезда-Объект-Земля», входящего в состав бортовой системы ориентации и стабилизации. Время макроцикла работы AC - период обращения на данной высоте полета.
2. Антенну и датчик устанавливают так, чтобы их геометрические оси совпадали с трансверсальным направлением.
Данное направление, в отличие от тангенциального, не зависит от параметров орбиты КА, значит, в принципе не требует поворотных устройств антенны, а на околокруговых орбитах, при значении эксцентриситета менее 0,0003 и максимальном удалении до объекта не более 74 км даже на самой высокой - геостационарной орбите, является идеальным опорным направлением, позволяющим получать качественные, отраженные от элементов конструкции КА-объекта, радиосигналы, а при наличии оптического датчика ПСО, работающего по объекту, как по звезде - и углы отклонения КА-объекта в ортогональном направлении. Фиксированное направление прицеливания антенны и датчика углов минимизирует погрешности наведения на объект (в ориентации направления прицеливания в пространстве не учитываются только погрешности стабилизации КА-субъекта). Относительная близость КА и большие абсолютные скорости их движения позволяют считать, что весь спектр пассивных сил на орбите (Солнце, Луна, нецентральность гравитационного поля Земли) действует на оба аппарата абсолютно одинаково, и любые отклонения свыше точностей определения пространственного положения КА-субъекта обусловлены маневрами КА-объекта.
3. Проводят траекторные измерения.
Операция аналогична операции п.2 прототипа.
4. Минимизируют эксцентриситет орбиты.
Орбита КА-субъекта должна всегда быть практически круговой, для чего коррекции наклонения планируют проводить двигателями, дающими проекции тяги нужного для минимизации эксцентриситета направления, и периодически проводят коррекции эксцентриситета орбиты.
Операция аналогична п.п.5,1 прототипа.
5. Проводят непрерывные измерения дальностей до КА-объекта в течение времени, пока наибольшие проекции панели солнечных батарей на плоскость, ортогональную к линии визирования «Субъект-Объект», больше длины волны излучения антенны.
Данное условие обязательно, оно вытекает из физики обработки отраженных сигналов.
6. На каждом шагу измерений осредняют дальности до объекта в привязке к выбранным моментам шагов.
7. На момент окончания каждого цикла, включающего шаги измерений, выявляют динамику изменения средней на шагах измерений дальности до КА-объекта.
8. Вычисляют оскулирующий период (большую полуось орбиты) КА-объекта.
При возможном эксцентриситете орбиты КА-объекта 0,0005 и расстоянии до него в 74 км угол отклонения КА-объекта в поле зрения датчика ПСО не превысит 16°, что вполне удовлетворительно для цели слежения за объектом с помощью неподвижного относительно конструкций КА прибора.
Для определения всего спектра параметров движения КА-объекта по значениям дальностей до КА-объекта и их первых производных необходимо и достаточно, чтобы цикл измерений составлял по времени четверть оборота вокруг Земли. Решают типовую задачу определения параметров движения центра масс КА, считая орбиту КА-субъекта известной.
Операция аналогична п.3 прототипа.
9. Определяют приращение оскулирующего периода обращения КА-субъекта к соответствующему оскулирующему периоду обращения КА-объекта.
По скорости расхождения КА получаем приращение оскулирующего периода обращения. Оскулирующий период обращения КА-субъекта известен всегда на любой момент времени - это типовая задача баллистического сопровождения «своего» КА.
10. Определяют за оборот угол между плоскостями орбит объекта и субъекта и время пересечения плоскостей орбит КА по показаниям датчика ПСО.
Получая в течение макроцикла (оборота) экстремальные значения отклонений КА-объекта от транверсального направления с привязкой ко времени, получают средние значения времени и угла пересечения плоскостей орбит КА.
11. Рассчитывают параметры подстроечной коррекции периода обращения.
Как отмечено в п.5 прототипа, при расчете параметров коррекций придерживаются выбранной стратегии управления движением центра масс КА, отражающейся в выборе или пролонгации точек «прицеливания». Для простого удержания в заданной области по долготе КА и наклонению орбиты КА точками «прицеливания» являются центр орбитальной позиции по долготе и оптимальным образом выбранная точка на фазовой плоскости [i; Ω]. Поскольку качественной коллокацией заниматься не приходится (этот процесс для аппаратов обоюдный), необходимость в точке «прицеливания» [е; π] отпадает. Отличие данной операции от операции п.5 прототипа заключается в безусловном приоритете процедуры слежения за КА-объектом перед процедурой (стратегией) собственного удержания КА-субъекта на заданной орбитальной позиции. Следящий КА должен распознавать и следовать стратегии управления КА-объектом, значит, по необходимости, аппроксимировать (менять) точки «прицеливания» и проводить коррекции чаще и оперативней, чем если бы перед ним не стояла задача слежения и сопровождения.
Параметры коррекции (время, длительность и условный номер двигателя коррекции) зависят от корректируемых параметров [i - угол пересечения плоскостей орбит КА (аналог наклонения), ΔТ - требуемое изменение оскулирующего периода] и рассчитываются по известным методикам (для справки можно вернуться к способу-аналогу). Для коррекции периода обращения чаще используют двигатели коррекции наклонения. Двигатели коррекции долготы используют в случае, когда плоскости орбит обоих КА практически совпадают.
Если приращение оскулирующего периода обращения превышает двухсуточную норму приращения за счет корректирующего воздействия, то переходят к п.12, иначе - планируют коррекции наклонения равными импульсами двигателями коррекции наклонения противоположного направления проекции тяги на трансверсаль. Выполнение этого условия позволяет реагировать на эволюции КА-объекта с допустимой задержкой, что экономит расход топлива на борту. Возможно, что на очередном витке периоды обращения аппаратов «сами собой» сблизятся, поскольку стратегия управления КА-объектом неизвестна.
12. Прикладывают корректирующее воздействие.
Операция аналогична п.1 прототипа.
Обоснование идеи радиоизмерений по пассивно отраженному лучу
Для целей спутниковой радиолокации применяются волны сантиметрового диапазона: S-band (4-2ГГц), длина волны (λ) 7,5-15 см и C-band (8-4ГГц), длина волны 3,8-7,5 см. Выбор диапазона влияет на разрешающую способность и на тип отражения (зеркальное, при L>>λ; диффузное, при L≤λ, L>λ). L - размер цели (ширина-высота). Выбираем S-band. При минимальной активной отражающей площади панелей солнечных батарей 2,7 м2 будем иметь зеркальное отражение. Под S-band - диапазон спутниковой связи проще "собрать" аппаратуру, т.е. какие-то элементы системы не придется вновь разрабатывать. Еще - частота завязана с размером антенны, с диаграммой направленности: чем меньше длина волны, тем меньше размер антенны. Для геостационарной орбиты ослабление не учитывается, там нет атмосферы. Сверхдостаточной окажется мощность передатчика порядка 32 Вт. С расстояния 74 км вернется сигнал мощностью (-165) дБ·Вт, не менее. Цифры по выходной и входной мощностям соответствуют отечественной автономной радионавигации. В реальности полного отражения радиосигнала от цели не получится, можем потерять порядка 20%, что не будет критично. Тип антенны - ФАР (фазированная антенная решетка) либо с синтезированной апертурой (СА). Выбираем антенну с СА, это позволит уменьшить массогабаритные характеристики бортовой радиолокационной системы (БРЛС). Примерный размер антенной решетки для S-band 25Х25 см, более точно размер можно указать только после расчета с учетом частоты излучаемого сигнала и прочих параметров).
Основное отличие ФАР и антенны СА в принципе действия. Принцип действия антенны с СА основан на использовании перемещения бортовой антенны радиолокационной системы для последовательного формирования антенной решетки. Бортовая антенна, как правило, при этом имеет небольшие размеры и достаточно широкую диаграмму направленности (ДН). Широкая ДН позволит улучшить качество приема.
На фиг.1 таблицей приведены характеристики отечественных БРЛС (ЩАР- щелевая антенная решетка). Нас интересует в таблице только массовые характеристики БРЛС. Из фиг.1 следует, что приемо-передающая аппаратура гарантированно не превысит 100 кг, что для требуемой целевой задачи КА-объекта вполне допустимо.
Предлагаемый способ адаптивного управления движением центра масс КА полностью удовлетворяет требованию сопровождения цели и обладает высокой точностью исполнения поставленной задачи. К тому же, очевидно, предлагаемый способ по отношению к прототипу более рационален в части затрат рабочего тела системы коррекции.
Изобретение предлагается ввести в рабочую документацию предприятия в 2011 г., провести отработку вышеприведенного способа удержания в 2012 г. и в полной мере использовать его на соответствующих геостационарных КА с 2013 г.
Способ адаптивного управления движением центра масс космического аппарата (КА), включающий проведение траекторных измерений, минимизацию эксцентриситета орбиты, определение положения КА-субъекта в инерциальном пространстве, расчет параметров коррекции в зависимости от отклонения корректируемого параметра от номинального значения, приложение корректирующего воздействия к корпусу КА путем включения двигателя, отличающийся тем, что на борту КА устанавливают и придают системе навигации и управления движением комплект приемопередающей радиоаппаратуры и оптический датчик углов «Полярная звезда - КА-субъект - КА-объект», причем антенну и оптический датчик устанавливают так, чтобы их геометрические оси совпадали с трансверсальным направлением, проводят непрерывные измерения дальности до КА-объекта в течение времени, пока наибольшая проекция панели его солнечных батарей на плоскость, ортогональную к линии визирования «КА-субъект - КА-объект», больше длины волны излучения антенны, на каждом шаге измерений осредняют дальности до КА-объекта в привязке к выбранным моментам шагов, на момент окончания каждого цикла, включающего шаги измерений, выявляют динамику изменения этих величин и вычисляют оскулирующий период обращения (большую полуось орбиты) КА-объекта, определяют приращение оскулирующего периода обращения КА-субъекта по отношению к соответствующему оскулируюшему периоду обращения КА-объекта, определяют за оборот угол между плоскостями орбит КА-объекта и КА-субъекта и время пересечения плоскостей орбит этих КА по показаниям оптического датчика углов, при этом в случае превышения приращением оскулирующего периода заранее заданной величины оперативно рассчитывают параметры подстроечной коррекции периода обращения и в расчетное время пересечения плоскостей орбит указанных КА включают двигатель коррекции, отдавая приоритет двигателю коррекции наклонения, согласно векторам относительных приращений ортогональной и трансверсальной скоростей объекта за коррекцию.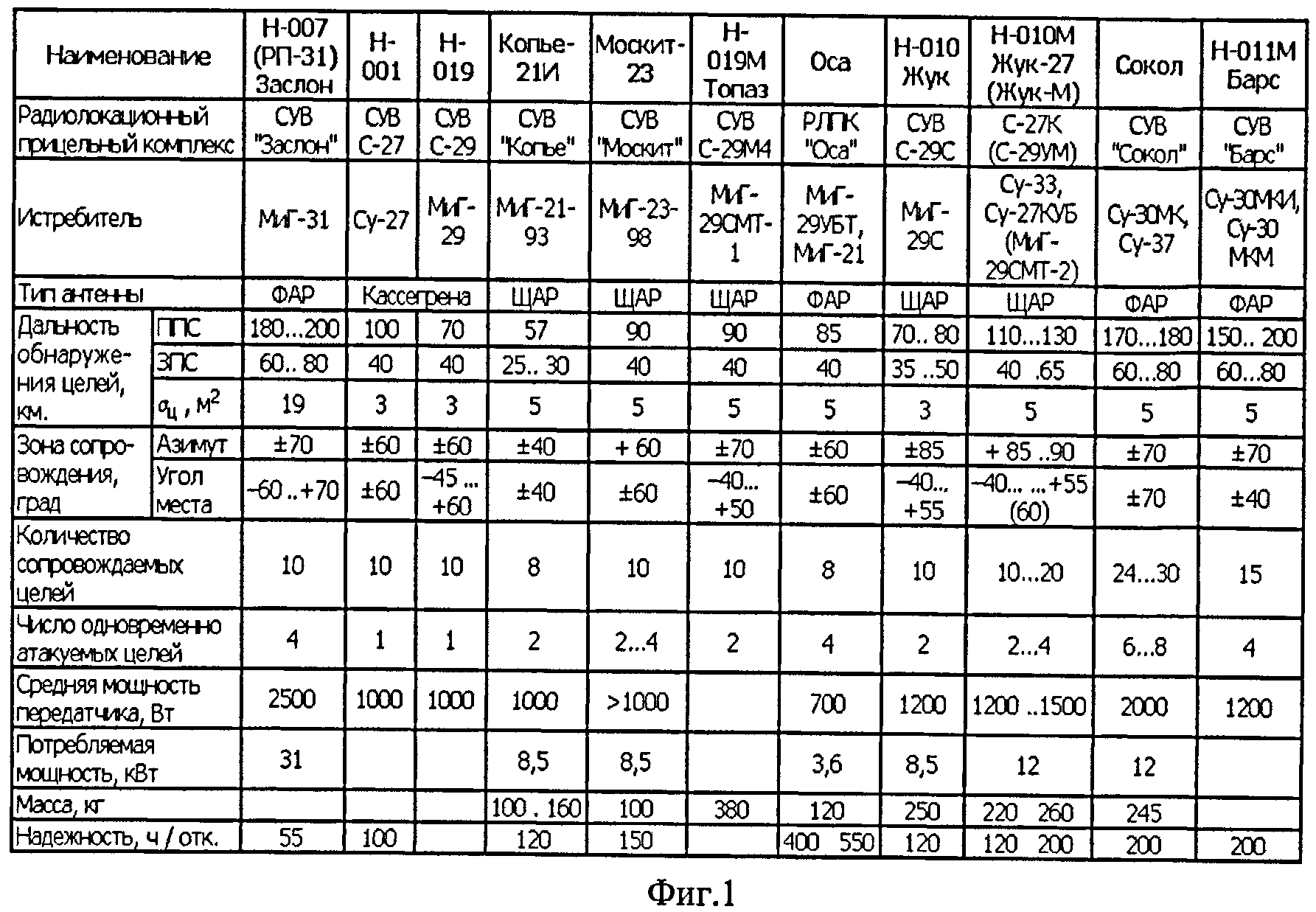
Узел герметизации стыка разъемных соединений
Способ создания контекста для сжатия измерительных данных и способ проведения измерений
Способ и устройство для обработки внутренней поверхности волноводов
Способ интеграции с автоматизированной системой управления данными об изделии
Способ тестирования двигателей коррекции космического аппарата
Способ удержания космического аппарата на геосинхронной 24-часовой орбите
Узел закрепления оборудования к силовой сетчатой конструкции из полимерных композиционных материалов
Способ изготовления космического аппарата
Термокамера и способ ее работы
Система ориентации навигационного спутника
Способ и устройство для обработки внутренней поверхности волноводов
Способ интеграции с автоматизированной системой управления данными об изделии
Способ тестирования двигателей коррекции космического аппарата
Способ удержания космического аппарата на геосинхронной 24-часовой орбите
Узел закрепления оборудования к силовой сетчатой конструкции из полимерных композиционных материалов
Способ изготовления космического аппарата
Термокамера и способ ее работы
Система ориентации навигационного спутника
Технологический кожух
Способ изготовления космического аппарата

