Результат интеллектуальной деятельности: СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ
Вид РИД
Изобретение
Изобретение относится к навигации летательных аппаратов (ЛА), а именно к комплексированию навигационных систем в навигационно-пилотажных комплексах для получения высокоточных параметров самолетовождения.
Уровень техники
Известна «Интегрированная инерциально-спутниковая навигационная система», патент RU №2277696 C2, от 21.04.2004 г., включающая радиоприемник, вычислитель местоположения навигационных спутников, местоположения пользователя, измерители проекции угловой скорости, кажущегося ускорения, выходы которых связаны с группой входов вычислителя навигационных параметров через корректор. В систему также входит вычислитель начальных данных, подключенный к входам блока комплексирования информации, вторая группа входов связана с выходами корректора угловой скорости и корректора кажущегося ускорения. Коррекция информации инерциальной части системы от измерителей проекции угловой скорости и кажущего ускорения происходит после комплексной обработки информационных сообщений спутниковой навигационной системы (СНС) (при выборе оптимального созвездия спутников) и данных от блока формирования начальных данных и вычислителя навигационных параметров ЛА.
Однако при решении комплексная обработка во время коррекции выходных данных недостаточно повышает надежность и точность навигационного комплекса при отключении сигналов СНС в условиях преднамеренного противодействия и при "затенении" или "срыве" сигналов СНС, а также при полетах на малой высоте в режиме скрытой навигации, например, в предгорных и горных районах.
В работах И.Н.Белоглазова, Г.И.Джанджгава, Г.П.Чигина «Основы навигации по геодезическим полям», Москва, «Наука», 1985 г., и Н.В.Павлова, Н.Д.Фролова «Определение местоположения летательного аппарата рельефометрической корреляционно-экстремальной навигационной системой», Измерительная техника и метрология, 2007 г., показаны принципы построения современных корреляционно-экстремальных навигационных систем (КЭНС), которые строят свою работу на заранее известной информации об участках маршрута ЛА (эталонная информация). Получая информацию о поле подстилающей поверхности от датчиков (текущая информация), КЭНС при помощи корреляционно-экстремальных методов определяет взаимное положение текущего и эталонного полей. КЭНС определяет текущую погрешность инерциальной навигационной системы (ИНС). КЭНС строятся на основе оптико-электронных (ОЭС) и радиолокационных систем (РЛС). Для улучшения точности и надежности КЭНС выделяются следующие пути: разработка КЭНС на базе ОЭС, работающей по устойчивому полю рельефа подстилающей поверхности, рельефометрические ОЭС (РОЭС) и разработка КЭНС на базе лазерных локационных станций (ЛЛС).
Однако изменчивость поля подстилающей поверхности, связанная с сезонными изменениями оптического поля Земли, и неблагоприятные погодные условия снижают точность и надежность при построении поля текущей подстилающей поверхности для КЭНС на базе ОЭС и РОЭС, для КЭНС на базе РЛС - неблагоприятные погодные условия, для КЭНС на базе ЛЛС - неблагоприятные погодные условия и применение наукоемких технологий.
В системе «Прицельно-навигационный комплекс оборудования многофункционального самолета», патент №RU 2392198 C1, от 15.06.2009 г., содержащей прицельно-навигационный комплекс многофункционального самолета, в который помимо ИНС, СНС входят: радиовысотомер (РВ), оптико-локационная система (ОЛС), система определения взаимных координат ЛА в группе, система управления оружием, система управлением и ввода информации (УВИ), система отображения информации (СОИ), интерактивная вычислительная среда комплекса, - построены дополнительные навигационные каналы, в том числе и на основе корреляционно-экстремальной навигации. Дополнительный навигационный канал построен при использовании корреляционно-экстремального метода для определения невязок ИНС по координатам и скоростям. В бортовой графической станции (БГС) осуществляется формирование цветной карты местности для индикации экипажу.
Однако в комплексе не предусмотрена комплексная обработка информации от ИНС и данных канала корреляционно-экстремальной навигации, что снижает надежность и точность определения координат самолета, например, при маловысотном полете или радиопротиводействии.
Наиболее близкий аналог приведен в книге Е.Г.Харина, «Комплексная обработка информации навигационных систем летательных аппаратов», Москва, Изд-во МАИ, 2002 г., [стр.64, …, 143] и [стр.146, …, 160], являющийся конфигурацией пилотажно-навигационных и навигационных комплексов (ПНК и НК), включающих в себя измерительные датчики и системы: инерциальные навигационные системы (ИНС), курсовертикали (KB), радиотехнические системы ближней навигации (РСБН), радиотехнические системы дальней навигации (РСДН), спутниковые навигационные системы (СНС), доплеровские измерители скорости и сноса (ДИСС), воздушные (аэрометрические) датчики и системы (ВДС), комплекс бортовых траекторных измерений (КБТИ). Комплексирование строится на основе коррекции автономных датчиков и систем, например ИНС или курсо-доплеровского вычислителя координат ЛА, по данным корректоров: СНС, РСБН, РСДН и др. С целью повышения точности ПНК или НК на борту ЛА (или после полета) проводится комплексная обработка информации (КОИ) от автономных систем и корректоров при использовании фильтра Калмана [стр.146, …, 160].
Неавтономность и помехозависимость радиотехнических корректоров ИНС (РСБН, РСДН, СНС), влияние геометрического фактора расположения наземных станций или используемого созвездия спутников СНС, а также удаление СНС от базовой корректирующей станции (БКС) снижает точность определения координат местоположения ЛА. Недостаточно высокая надежность и точность навигационного комплекса А, возможное отключение сигналов СНС в условиях преднамеренного противодействия или при «затенении» или «срыве» сигналов СНС приводит к недостаточно высокой надежности и точности навигационного комплекса, например, при маловысотном полете.
Прогресс в создании точных малогабаритных систем автономной коррекции ошибок ИНС, работающих по геофизическим полям, и прогресс в формировании ЦКИ по аэрокосмическим снимкам и топографическим картам при значительном увеличении вычислительной мощности бортовых процессоров предопределяют задачу увеличения степени автономности или создания полностью автономных комплексных навигационных систем.
Техническим решением для достижения заявляемого изобретения является повышение степени автономности и помехоустойчивости навигационного комплекса при использовании радионавигационных и автономных средств навигации (в условиях возможных преднамеренных радиопротиводействий или при естественном "затенении" и "срыве" радионавигационных сигналов) при определении действительных значений параметров самолетовождения и повышение надежности и точности траекторных измерений ЛА (на трассах, приаэродромных зонах, при маловысотных полетах в предгорной и горной местности) при сохранении положительных качеств прототипов путем комплексной обработки данных ИНС и информации от двух разнородных корректоров: радионавигационного и автономного или путем комплексной обработки данных ИНС и информации только от автономного корректора.
Существенные признаки
Для осуществления заявленного технического решения в системе комплексной обработки информации радионавигационных и автономных средств навигации для определения действительных значений параметров самолетовождения на трассах, в приаэродромных зонах, при маловысотных полетах в предгорной и горной местности, включающей в бортовую часть автономное средство - инерциальную навигационную систему (ИНС) и радионавигационный корректор - спутниковую навигационную систему (СНС) (в стандартном и в дифференциальном режиме работы с использованием контрольной базовой станции (БКС) или контрольной корректирующей станции (ККС), выходы которых в вычислительной среде бортовой цифровой вычислительной машины (БЦВМ) или специально установленного модифицированного комплекса бортовых траекторных измерений (КБТИ-М), отдельно подключены к входам блока комплексной обработки информации (КОИ), а именно к входам формирования измерительной информации (ИИ), который подключен к последовательно связанным блокам: формирования векторов измерений (ФВИ) с контролем измерений для защиты фильтра Калмана, оценки погрешностей ИНС (ОП ИНС) при использовании модифицированного фильтра Калмана, вычисления навигационных параметров (ВНП) с одновременно соединенным с ним выходом блока ИИ, в БЦВМ (или КБТИ-М) дополнительно введены: автономный корректор данных ИНС - вычислительный блок корреляционно-экстремальной обработки информации (КЭОИ), связанный отдельно с бортовыми измерителями: ИНС, воздушным (аэрометрическим) датчиком и системой (ВДС), радиовысотомером (РВ), и соединенный с КЭОИ блок данных эталонных значений модели высоты рельефа местности и объектового состава (МВР и ОС) на зону полетов, размещенных в буфере БЦВМ (или КБТИ-М), а наземная часть системы выполнена на персональной электронной вычислительной машине (ПЭВМ). В ПЭВМ включены: вторые блоки, связанные между собой последовательно: МВР и ОС, КЭОИ и КОИ, банк данных (БД) пространственных эталонных моделей рельефа местности и объектового состава, содержащий блок цифровой картографической информации (ЦКИ) и модуль математических методов приближений сплайнами (МПС), связанные выходами с входами формирователя системы координатных линий (ФКЛ), вычислительный блок сопровождающего математического моделирования (СММ), включающий блок имитации движения ЛА (ИД) в зоне планируемого полета, связанный с ним блок моделирования измерительных сигналов (МИС) основных бортовых измерителей. Выход ФКЛ БД подключен ко второму блоку МВР и ОС, а выход МИС СММ подключен ко вторым блокам КЭОИ и ИИ КОИ для предполетной обработки и учета влияния погрешности РВ, систематических и случайных ошибок привязки на трассах, в приаэродромных зонах, при маловысотных полетах в предгорной и горной местности.
Кроме того, для визуализации и последующего апостериорного анализа результатов полета в динамике, особенно, в условиях маловысотного полета в предгорной и горной местности в нее введен блок оценки, анализа и визуализации (ОАВ) траектории ЛА в среде эталонной МВР и ОС в формате 3D. Вход ОАВ подключен к выходам блоков (МВР и ОС) и ВНП. Для повышения точности и надежности определения действительных значений параметров самолетовождения на трассах в условиях возможных преднамеренных радиопротиводействий и при естественном "затенении" и "срыве" радионавигационных сигналов используют КОИ по достаточной информации только от автономных средств - ИНС и КЭОИ.
При этом для построения высокоточных МВР и ОС на зону полетов по ЦКИ на профилях высот рельефа параллельных осям геодезической системы координат сформированы криволинейные координатные линии с построением интерполяционных или локально-аппроксимирующих сплайнов, а для сохранения геометрических характеристик высоты рельефа и объектового состава на сформированных координатных линиях использованы изогеометрические сплайны; эталонные значения высоты в любой точке МВР и ОС определяются как тензорное произведение одномерных изогеометрических сплайнов, построенных на сетке профилей высоты рельефа местности, параллельных осям геодезической системы координат; эталонные модели аттестуются и архивируются в банк данных эталонных моделей (БД) с учетом приемлемых ограничений на траектории движения ЛА для последующего уточнения и использования с навигационными данными.
Для повышения точности определения текущего профиля рельефа, формируемого по разности сигналов бароинерциальной и геометрической высоты полета, значения высот аппроксимируются локальными сплайнами на фоне случайных составляющих погрешностей измерений.
Таким образом, технический результат достигается тем, что в оперативную часть БЦВМ или в специально устанавливаемый на борт ЛА комплект КБТИ-М вводится вычислительный блок корреляционно-экстремальной обработки информации, а в их долговременную память (или буфер) цифровые данные эталонной МВР и ОС на трассу полета. Входами в блок КЭОИ являются регистрируемые информационные сообщения от ИНС, РВ, ВДС и данные от эталонной МВР и ОС.
Вводится формирование эталонной МВР и ОС по данным ЦКИ при использовании эффективных методов сплайн-приближений функций: рациональных, локальных и изогеометрических сплайнов, сохраняющих геометрические свойства приближаемой поверхности рельефа местности. Вводится создание банка эталонных МВР и ОС для последующего уточнения и оперативного использования.
Вводится использование при реализации алгоритмов КЭОИ сопровождающего математического моделирования для оценок влияния погрешностей РВ, зависящих от высоты полета, и составляющих погрешностей привязки траектории ЛА при использовании над зоной полетов.
Предлагаемое изобретение иллюстрируется блок-схемой системы комплексной обработки информации и представлено на фиг.1-2.
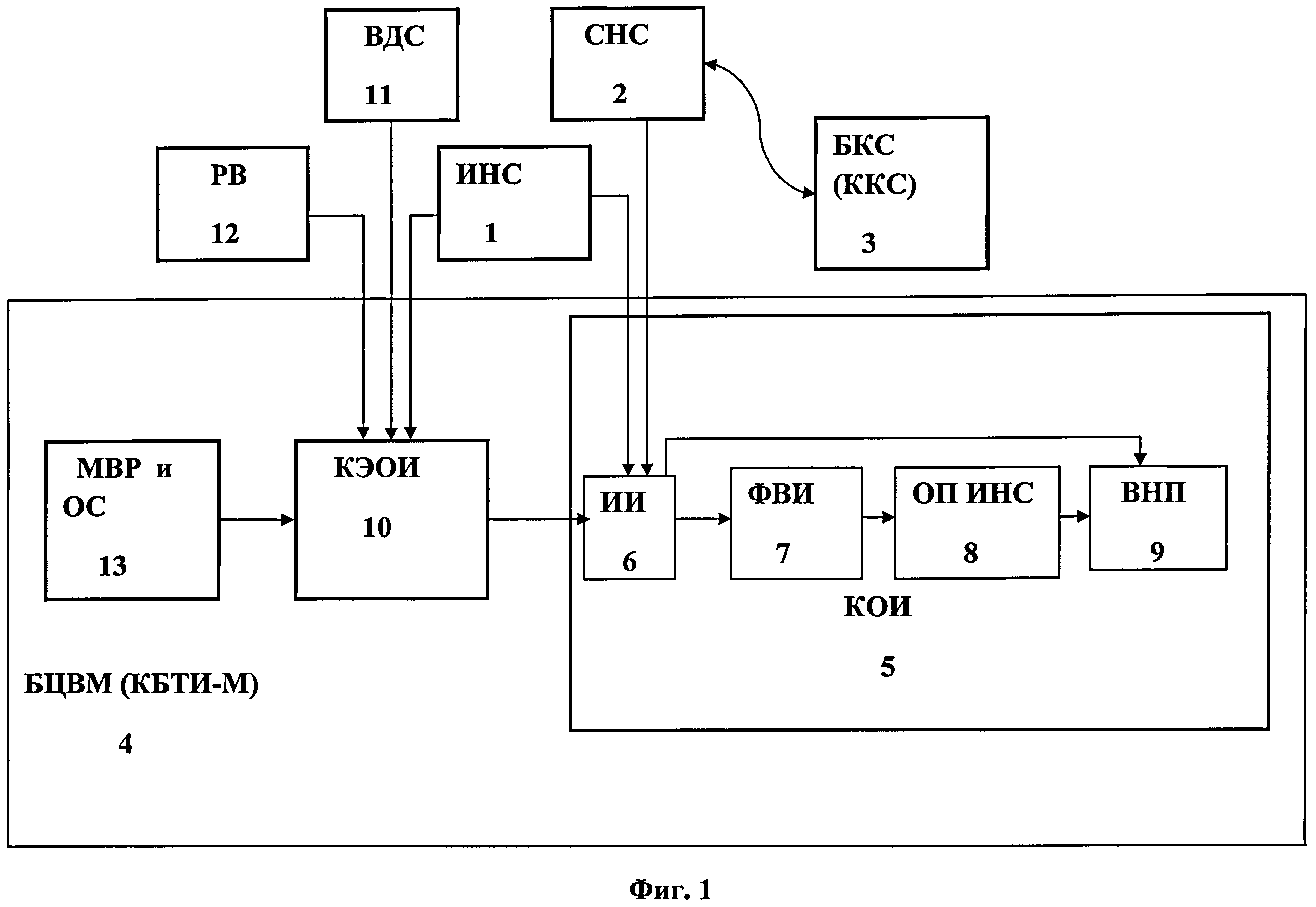
На фиг.1 приведена блок-схема бортовой части предлагаемой системы комплексной обработки информации радионавигационных и автономных средств навигации для определения действительных значений параметров самолетовождения на трассах, в приаэродромных зонах, при маловысотных полетах в предгорной и горной местности, содержит автономное средство - инерциальную навигационную систему (ИНС) 1 и радионавигационный корректор - спутниковую навигационную систему (СНС) 2 (в стандартном и в дифференциальном режиме работы с использованием базовой корректирующей станции (БКС) 3 или контрольной корректирующей станции (ККС) 3), выходы которых в вычислительной среде бортовой цифровой вычислительной машины (БЦВМ) 4 или специально установленного модифицированного комплекса бортовых траекторных измерений (КБТИ-М) 4 отдельно подключены выходами к входам блока комплексной обработки информации (КОИ) 5, а именно к входу формирования измерительной информации (ИИ) 6, который подключен к последовательно связанным блокам: формирования векторов измерений (ФВИ) 7 с контролем измерений для защиты фильтра Калмана, оценки погрешностей ИНС (ОП ИНС) 8 при использовании модифицированного фильтра Калмана, вычисления навигационных параметров (ВНП) 9 с одновременным подключением к нему выхода блока ИИ 6, в БЦВМ 4 (или КБТИ-М) дополнительно введены: автономный корректор данных ИНС - вычислительный блок корреляционно-экстремальной обработки информации (КЭОИ) 10, связанный отдельно с бортовыми измерителями: воздушным (аэрометрическим) датчиком и системой (ВДС) 11, радиовысотомером (РВ) 12, ИНС 1 и соединенный с КЭОИ 10 блок данных эталонных значений модели высоты рельефа местности и объектового состава (МВР и ОС) на зону полетов 13, размещенных в буфере БЦВМ 4 (или КБТИ-М) 4.
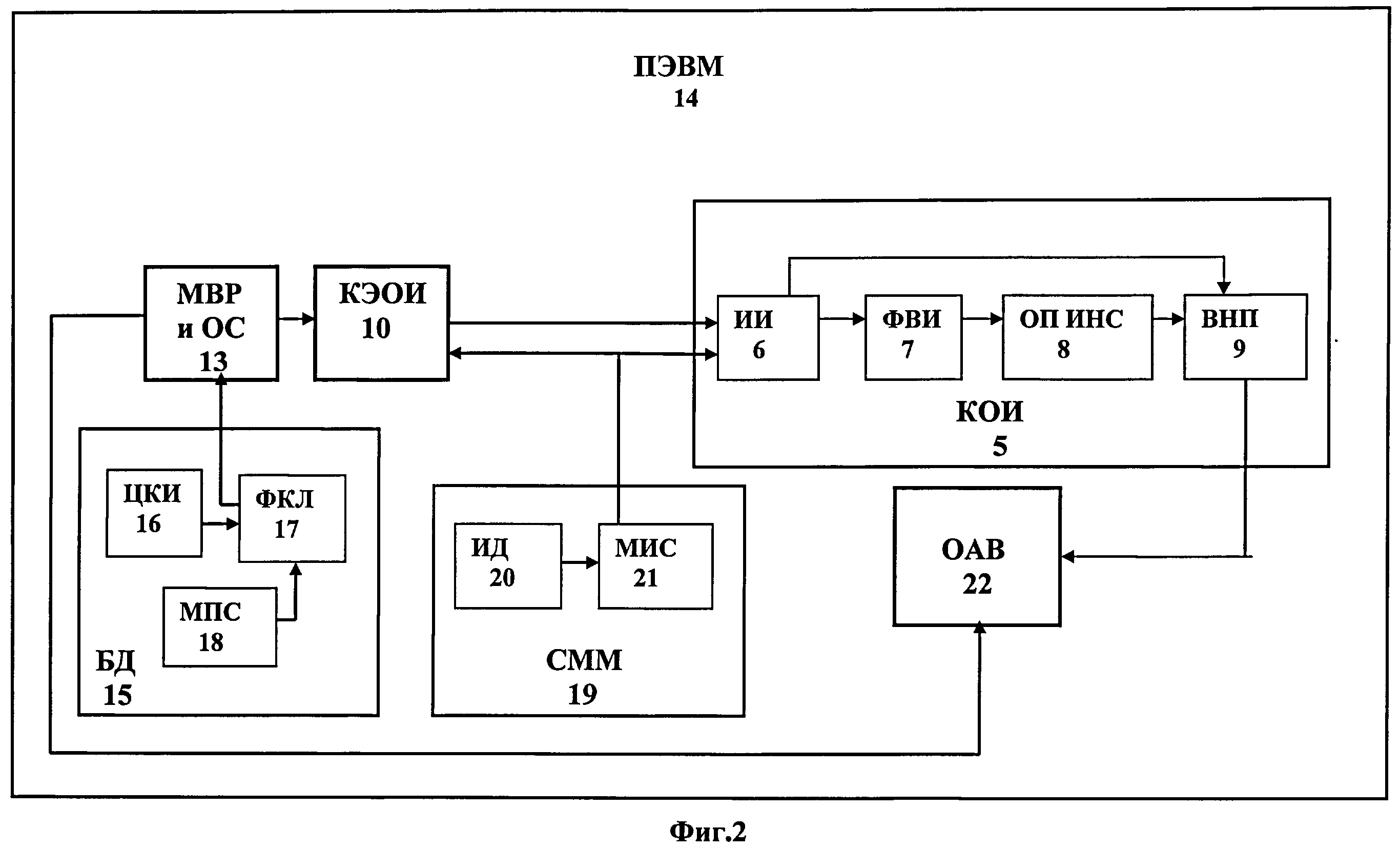
На фиг.2 приведена блок-схема наземной части системы предлагаемой системы комплексной обработки информации радионавигационных и автономных средств навигации для определения действительных значений параметров самолетовождения на трассах, в приаэродромных зонах, при маловысотных полетах в предгорной и горной местности, включающая персональную электронную вычислительную машину (ПЭВМ) 14, которая содержит: вторые блоки, связанные между собой последовательно: МВР и ОС, КЭОИ и КОИ 13, 10 и 5, банк данных (БД) пространственных эталонных моделей рельефа местности и объектового состава 15, содержащий блок цифровой картографическая информация (ЦКИ) 16 и модуль математических методов приближений сплайнами (МПС) 18, связанные выходами с входами формирователя системы координатных линий (ФКЛ) 17, вычислительный блок сопровождающего математического моделирования (СММ) 19, включающий блок имитации движения ЛА (ИД) 20 в зоне планируемого полета, связанный с ним блок моделирования измерительных сигналов (МИС) 21 основных бортовых измерителей. Выход ФКЛ 17 БД 15 подключен к блоку МВР и ОС 13, а выход МИС 21 СММ 19 подключен ко вторым блокам КЭОИ 10 и ИИ 6 КОИ 5 для предполетной обработки и учета влияния погрешности РВ, систематических и случайных ошибок привязки на трассах, в приаэродромных зонах, при маловысотных полетах в предгорной и горной местности.
Кроме того, для визуализации и последующего апостериорного анализа результатов полета в динамике, особенно, в условиях маловысотного полета в предгорной и горной местности в нее введен блок оценки, анализа и визуализации (ОАВ) траектории ЛА 22 в среде эталонной МВР и ОС в формате 3D. Вход ОАВ 22 подключен к блокам (МВР и ОС) 13 и КОИ 5. Для повышения точности и надежности определения действительных значений параметров самолетовождения на трассах в условиях возможных преднамеренных радиопротиводействий и при естественном "затенении" и "срыве" радионавигационных сигналов используют КОИ 5 по достаточной информации только от автономных средств - ИНС 1 и КЭОИ 10.
Более того, для построения высокоточных МВР и ОС 12 на зону полетов по ЦКИ 15 на профилях высот рельефа, параллельных осям геодезической системы координат, сформированы криволинейные координатные линии на сетке узлов с построением интерполяционных или локально-аппроксимирующих сплайнов. Для сохранения геометрических характеристик высоты рельефа на сформированных координатных линиях использованы изогеометрические сплайны. Эталонные значения высоты в любой точке МВР и ОС определяются как тензорное произведение одномерных изогеометрических сплайнов, построенных на сетке профилей высоты рельефа местности, параллельных осям геодезической системы координат. Эталонные модели аттестуются и архивируются в банк эталонных моделей (БД) 15 с учетом приемлемых ограничений на траектории движения ЛА для последующего уточнения и использования с навигационными данными.
Система работает следующим образом
Для получения оценок погрешностей ИНС 1 и определения действительных значений параметров самолетовождения используют комплексную обработку измерительной информации в двух вариантах: в первом - при использовании данных от ИНС 1, СНС 2 и КЭОИ 10, во втором - при использовании информации только от ИНС 1 и КЭОИ 10 с помощью модифицированного фильтра Калмана.
Комплексная обработка осуществляют как в процессе полета, так и в послеполетной обработке.
Вводится наземная статистическая обработка результатов полетов и результатов СММ 19, объединенных по критериям однородности и принадлежности одной и той генеральной совокупности.
Вводится визуализация траектории полета в среде пространственной модели рельефа местности в зоне полетов в формате 3D.
Бортовая часть системы (фиг.1) функционирует следующим образом.
В БЦВМ 4 (или КБТИ-М) поступает совокупность значений пространственно-угловых параметров ЛА от ИНС(1), СНС(2), РВ(12), ВДС(11), БКС (ККС)(3)(если используется дифференциальный режим СНС):
{φинсi, λинсi, VNинсi, VEинсi, ψинсi, γинсi, υинсi, Vy инсi, У сi};
{φснсi, λснсi, VNснсi, VЕснсi}; {Нг PBi, H Бi};
{ΔD1i,…,ΔDni},
где
φинсi, λинсi, VNинсi, VЕинсi, ψинсi, γинсi, υинсi, Vy инсi, У сi - значения соответственно координат, скоростей, угла курса, крена, тангажа, вертикальной скорости и угла сноса ЛА, измеренных ИНС 1;
φснсi, λснсi, VNснсi, VЕснсi - значения соответственно координат и скоростей ЛА, измеренных СНС 2;
Нг PBi, Н Бi - значения соответственно геометрической и барометрической (абсолютной) высоты полета ЛА;
ΔD1i,…,ΔDni - поправки в псевдодальности от n спутников СНС 2 от БКС (ККС) 3.
В буфер БЦВМ (КБТИ-М)(4) заранее записывают цифровые информационные данные эталонной пространственной МВР и ОС 13 на трассу полета, извлекаемые из банка пространственных моделей БД 15, сформированные перед полетом в наземной части заявляемой системы ПЭВМ 14, а именно совокупность:
 ,
,
где
Δij - сетка узлов прямоугольной матрицы высот на трассу полета;
Xij, Yij - значения геодезических координат в узлах сетки Δij в системе Гаусса-Крюгера;
Hij - значения высоты рельефа в узлах сетки Δij;
 - значения первой производной высоты рельефа в узлах сетки Δij на профилях, построенных вдоль координатной линии X;
- значения первой производной высоты рельефа в узлах сетки Δij на профилях, построенных вдоль координатной линии X;
 - значения первой производной высоты рельефа в узлах сетки Δij на профилях, построенных вдоль координатной линии Y;
- значения первой производной высоты рельефа в узлах сетки Δij на профилях, построенных вдоль координатной линии Y;
 - значения смешанной производной высоты рельефа в узлах сетки.
- значения смешанной производной высоты рельефа в узлах сетки.
В вычислительном блоке КЭОИ 10, включенном в программное обеспечение БЦВМ (или КБТИ-М)(4), осуществляют корреляционно-экстремальную обработку входной информации измеренной высоты рельефа подстилающей местности Hpi и эталонных данных от МВР и ОС 13:
Hpi=f(Hг PBi, Н Бi, Vy инсi, ψинсi, γинсi, υинсi).
Осуществляют поиск траектории и места ЛА, наилучшим образом совпадающих с измерениями высоты рельефа местности в зоне полета, полученных по измерениям РВ 12, бароинерциальной высоты и эталонными данными от МВР и ОС 13. С целью компенсации инерционности барометрических данных от ВДС 11 комплексируют измерения Н Бi с измерениями вертикальной скорости Vy инci от ИНС 1.
В блоке КЭОИ 10 используют комбинированный (поисковый и уточняющий) алгоритм привязки, основанный на вычислении квадратичных функционалов разности эталонной и измеренной высоты рельефа местности их градиентов. Для повышения точности определения текущего профиля рельефа, формируемого по разности сигналов бароинерциальной и геометрической высоты полета, значения высот аппроксимируются локальными сплайнами на фоне случайных составляющих погрешностей измерений. Размер доверительного квадрата для поискового алгоритма связан с погрешностью определения координат местоположения посредством ИНС 1 в автономном инерциальном режиме счисления за час полета или в автономном режиме счисления за 30 мин полета после непрерывной коррекции по информации от СНС 2. Для надежной работы поискового алгоритма длина стороны доверительного квадрата должна превышать эти значения. Высоту рельефа в любой точке Hp(X,Y) эталонной пространственной модели высот вычисляют по выбираемым локальным данным высот и их производных ближайших узлов сетки Δij:
Hp(X,Y)=Sizg(Y, X)=ψ(Х) F4,4 ψT(Y),
где
Sizg(Y, X) - двумерный изогеометрический сплайн;
F4,4 - матрица высот, первых и смешанных производных в четырех узлах ближайшей окрестности измеряемой точки, автоматически выбираемых из совокупности значений:

где ψ(X), ψT(Y) - векторы, элементы которых зависят от значений аргументов X,Y и интервалов узлов сетки Δij по координатным линиям Xi и Yj.
Уточняющий алгоритм реализуется на основе оценки глобального минимума квадратичного функционала (на фоне возможных паразитических локальных минимумов) разностей производных высот эталонного и измеренного профилей рельефа местности. Производные в точках эталонного профиля определяют по локальным данным производных и их смешанных производных двумерного изогеометрического сплайна в узлах сетки ближайшей окрестности.
В ИИ 6 вычислительного блока КОИ 5 поступает совокупность информационных сообщений от ИНС 1, СНС 2 и вычисленных в КЭОИ 10 значений корректирующих поправок к координам ИНС 1, скоростей ЛА (с оценками достоверности) и погрешностей их определения:
{Δφкэоиi, Δλкэоиi, V Nкэоиi, VЕкэоиi},
где
Δφкэоиi, Δλкэоиi, VNкэоиi, VЕкэоиi - значения соответственно корректирующих поправок к координатам ИНС и значения скоростей ЛА, определяемые в блоке КЭОИ 10.
Вводят поправки в координаты ЛА, полученных из сопровождающего математического моделирования СММ 19 на зону полетов. Эти поправки могут быть введены при наземной обработке полетной информации.
Из совокупности поступающей в ИИ 6 информации от ИНС 1, СНС 2 и КЭОИ 10 в ФВИ 7 формируют векторы измерений с контролем для защиты фильтра Калмана, состоящие из поправок к координатам и скоростям ЛА по осям платформы ИНС 1 при использовании информации в двух вариантах: при использовании данных от автономного корректора КЭОИ 10 или при использовании информации от двух разнородных корректоров СНС 2 и КЭОИ 10:
- в первом случае вектор измерений принимает вид:
Zk=[ΔSx кэоиi, ΔSy кэоиi, ΔVx кэоиi, ΔVy кэоиi].
- во втором:
Zk=[ΔSx снсi, ΔSy снсi, ΔSx кэоиi, ΔSy кэоиi, ΔVx снсi, ΔVy снсi, ΔVx кэоиi, ΔVy кэоиi],
где ΔSx снсi, ΔSy cнci, ΔVx cнci, ΔVy снсi - поправки соответственно по координатам и скоростям в осях платформы ИНС 1 по данным СНС 2;
ΔSx кэоиi, ΔSy кэоиi, ΔVx кэоиi, ΔVy кэоиi - поправки соответственно по координатам и скоростям в осях платформы ИНС 1 по данным КЭОИ 10.
В блоке ОП ИНС 8 при использовании сформированных векторов измерений и комплексной обработки информации с помощью фильтра модифицированного Калмана оценивают погрешности ИНС 1, а именно совокупность параметров:
{ΔSx, ΔSy, ΔVx, ΔVy, θx, θy, θz, ωxx, ωxy, ωyz, ωyy, ωxn, ωyn, ωzn, Δm1, Δm2};
где
ΔSx, ΔSy - составляющие погрешности ИНС 1 в определении координат (в горизонтальных осях платформы);
ΔVx, ΔVy - составляющие погрешности ИНС 1 в определении скоростей;
θx, θy, θz - угловые погрешности в определении вертикали и курса;
ωxx, ωxy, ωyz, ωуу - коэффициенты пропорциональности в составляющих скоростей дрейфов гироскопов, зависящих от ускорения;
ωxn, ωyn, ωzn - постоянные составляющие дрейфов гироскопов в осях приборного трехгранника;
Δm1, Δm2 - масштабные коэффициенты в погрешностях, зависящих от ускорения.
В ВНП 9 по оценкам погрешностей ИНС 1, полученным в ОП ИНС 8, и исходной информации ИИ 6 вычисляют совокупность действительных значений навигационных параметров ЛА, как при использовании достаточной информации от автономного корректора КЭОИ 10, так и при использовании избыточной информации от корректоров КЭОИ 10 и СНС 2.
Вычисленные в блоке КОИ 5 параметры самолетовождения, а именно совокупность действительных значений:
{φдi, λдi, VNдi, VEдi, ψдi, Ус дi},
где
φдi, λдi, VNдi, VEдi - значения координат и скоростей ЛА;
φдi, Ус дi - значения курса и угла сноса ЛА;
после полета поступают в блок оценки и анализа ОАВ 22 наземной части системы.
Наземная часть системы (фиг.2) функционирует следующим образом.
Формируют эталонные МВР и ОС 13, позволяющие:
- на порядок уменьшать количество полезных узлов о высоте рельефа по сравнению с исходной информацией, снятой с ЦКИ 16;
- строить поле рельефа с точностью составления топографических карт или планов на равнинной, всхолмленной, предгорной и горной местности.
При этом исходная цифровая картографическая информация ЦКИ 16, полученная по топографическим картам, планам или космическим снимкам разных масштабов, используется для построения профилей высот рельефа местности на зону полетов со следующими условиями и допущениями.
1. Функция высоты рельефа по любому направлению характеризуется различной степенью гладкости, выпуклостью, вогнутостью, точками излома, а также возможными большими градиентами.
2. Область существования функции высоты рельефа представляет собой прямоугольный участок, ориентированный по осям X и Y геодезической системы координат Гаусса-Крюгера. Профили высот рельефа параллельны геодезическим осям X и Y. Интервал разбиения профилей и расстояние между профилями выбирается в зависимости от характерных и особых точек рельефа: экстремальные места по высоте, точки перегиба, изломов и т.п. Величина переменного шага разбиения связана с интервалом корреляции и изменением градиента на профилях;
3. С целью сокращения количества узлов исходной информации о высоте рельефа на профилях участка, построенных вдоль осей X и Y, может проводиться аналитическое сгущение значений высоты, осуществляемое интерполяционными или аппроксимационными математическими методами, которые должны одновременно удовлетворять требованиям количественного и качественного характера при приближении высоты равнинного и горного рельефа. Значения высот рельефа в узлах сгущаемой сетки оцениваются как среднее значение высот узлов профилей, построенных вдоль осей X и Y;
4. С целью соблюдения условий простоты и экономичности вычислительного процесса высота рельефа в любой точке должна определяться по локальным данным ближайшей окрестности узлов сетки, включающей эту точку.
В МПС 18 с целью сжатия полезной информации, интерполяции и аппроксимации высот рельефа при сохранении геометрических его характеристик на профилях, таких как: положительность, монотонность, выпуклость, наличие линейных участков, точек излома, больших градиентов в перепаде высот, - используются рациональные, локальные и изогеометрические сплайны (см. Завьялов Ю.С., Квасов Б.И., Мирошниченко В.Л. Методы сплайн-функций. М.: Наука, 1980 г., стр.187, …, 193; см. Б.И.Квасов. Методы изогеометрической аппроксимации сплайнами. 2006 г., стр.195, …, 218).
В ФКЛ 17 с помощью рациональных или локально-аппроксимирующих сплайнов вдоль осей X и Y строят систему криволинейных координатных линий на профилях высот ЦКИ 16. С целью сохранения геометрических характеристик высоты рельефа на сформированных координатных линиях строят изогеометрические сплайны, для чего корректируют значения первых и вторых производных по высоте, исходя из требований изогеометрии: сохранения положительности, монотонности и выпуклости рельефа и производят выбор расширяющих сетку узлов дополнительных точек перегиба. Возможные типы ограничений первой и второй производной в узле xi формализуются и классифицируются с помощью целочисленного индекса, который вычисляется в xi (1≤i≤N-1).
Проверяют условия монотонности и выпуклости на подотрезках, где значения производных не менялись. При невыполнении этих условий выполняют построение на этих подотрезках рациональных сплайнов, а адаптирующиеся и на линейные участки, точки излома и большие градиенты перепада высот. В результате на прямоугольном участке образуется система криволинейных координатных линий (изогеометрических сплайнов Sizg), порождающих регулярную сетку Δij узлов:
Sizg=f(Hpi, xi, mi, N, Xi, k);
где
Hpi - значения функции высоты рельефа;
xi - значения аргумента в узлах;
mi - значения 1-й производной сплайна;
N - количество точек на сетке;
Xi - значения аргумента, в которых вычисляются значения сплайна,
k - порядок вычисляемой производной сплайна.
Поверхность высоты рельефа местности МВР и ОС 13 строят как двумерный сплайн, определяемый как тензорное произведение одномерных изогеометрических сплайнов Sizg.
Алгоритм формирования МВР и ОС 13 наземной части системы включает следующие основные этапы:
- исходную информацию о высоте рельефа Hij в узлах прямоугольной сетки Δij располагают в виде матрицы, где окаймляющие строки и столбцы являются краевыми условиями - первыми и смешанными производными. Каждые строка и столбец этой матрицы содержит необходимую и достаточную информацию для построения изогеометрического сплайна вдоль одной из линий Xi(i=0,…,M) или Yj(j=0,…,N);
- строят изогеометрические сплайны от переменной Y геодезической системы координат, Sizg(Y,Xj), j=0,…,M, по строкам матрицы Hij с краевыми условиями из граничных столбцов. Находят значения первых производных сплайна по высоте
 ,
,
значения  располагают в виде исходной матрицы Hij без граничных столбцов, а в граничных строках размещают значения смешанной производной изогеометрического сплайна
располагают в виде исходной матрицы Hij без граничных столбцов, а в граничных строках размещают значения смешанной производной изогеометрического сплайна
 ;
;
- по столбцам матрицы  строят изогеометрические сплайны от переменной Х геодезической системы координат, Sizg(Yi, X), i=0,…N, получаемые значения производных сплайнов в узлах сетки есть смешанные производные искомого сплайна
строят изогеометрические сплайны от переменной Х геодезической системы координат, Sizg(Yi, X), i=0,…N, получаемые значения производных сплайнов в узлах сетки есть смешанные производные искомого сплайна
 ;
;
- по данным исходной матрицы Hij строят изогеометрические сплайны Sizg(Yi, X), i=0,…N от переменной X, в результате чего находятся значения
В итоге в узлах сетки Δij формируют совокупность величин:
 ,
,
которая полностью определяет изогеометрический сплайн двух переменных, удовлетворяющий интерполяционным и краевым условиям.
Проводят оценку точности построения пространственной МВР и ОС 13 по всей поверхности при использовании исходной ЦКИ 16.
Сформированную МВР и ОС 13 архивируют в банк пространственных эталонных моделей БД 15 для последующей детализации и использования с навигационными данными.
Используют сопровождающее математическое моделирование СММ 19 с целью уменьшения степени влияния на точность определения координат ЛА корреляционно-экстремальным методом: погрешностей РВ 12 в зависимости от расстояния до земной поверхности, ориентации диаграммы направленности антенны РВ 12, обусловленных интегрированием отраженного сигнала по всему пятну засветки от РВ 12, учета влияния на процесс привязки к подстилающей поверхности систематических и случайных ошибок над зоной полетов, учета возмущающих факторов: погрешности построения модели рельефа местности, возмущение или сбои радиосигнала.
В блоке ИД 20 имитируют движение ЛА в требуемом режиме полета над заданной трассой. Движение ЛА проводится методом счисления пути с заданными значениями путевой скорости, высоты, курса, крена, тангажа и интервалом счисления с допустимыми ограничениями на траекторию полета.
В МИС 21 при использовании эталонной траектории ЛА и известных моделей погрешностей измерений формируют значения основных параметров, определяемых бортовыми измерителями ИНС 1, СНС 2, ВДС 11 и РВ 12, состоящие из аддитивной смеси полезной части сигналов, систематических и случайных составляющих погрешностей измерений. Допускается принадлежность систематических и случайных составляющих погрешностей измерений к классу стационарных случайных процессов, находящихся в непересекающихся частотных диапазонах и распределенных по нормальному закону.
Во втором вычислительном блоке КЭОИ 10 осуществляют корреляционно-экстремальную обработку выходной информации от МИС 21 и данных от второго блока МВР и ОС 13. Формируют эталонную траекторию ЛА и соответствующий ей эталонный профиль высоты рельефа. Осуществляют поиск траектории и места ЛА по полученным измерениям рельефа, наилучшим образом совпадающих с эталонным профилем высоты рельефа местности в зоне полета.
Для определения действительных значений навигационных параметров ЛА во втором блоке КОИ 5 используют комплексную обработку измерительной информации, поступающей от блока МИС 21 и второго блока КЭОИ 10. Последовательность и варианты комплексной обработки измерительной информации для определения действительных значений параметров самолетовождения во втором блоке КОИ 5 при наземной обработке аналогична обработке в полете.
В ОАВ 22 при использовании эталонной траектории полета ЛА проводят оценку поправок второго блока КЭОИ 10 по координатам и оценку точности определения параметров самолетовождения при использовании второго блока КОИ 5 и осуществляют визуализацию совместного изображения траектории маловысотного полета ЛА в среде второго блока пространственной эталонной МВР и ОС 13 в формате 3D. В блоке ОАВ 22 также оценивают, анализируют и визуализируют траекторию ЛА, полученную в полете. При наземной обработке координаты ЛА, полученные по полетным данным и в результате сопровождающего математического моделирования, объединяются по критериям однородности условий и проверяются на принадлежность одной и той же генеральной совокупности. По совокупности полетов и реализаций моделирования оцениваются статистические характеристики значений параметров самолетовождения.
Способ получения полидисперсного порошка карбида бора
Способ термической обработки изделий из высокопрочных алюминиевых сплавов
Аппарат на воздушной подушке
Способ увеличения подъемной силы самолета и устройство для его реализации
Состав эпоксибисмалеимидной смолы и способ ее получения
Способ определения термомеханических характеристик материалов, обладающих эффектом памяти формы
Способ повышения чувствительности электромагнитных датчиков пульсаций скорости преобразователей гидрофизических полей
Пьезоакселерометр
Распылитель форсунки
Способ определения контрольных значений параметров пространственно-угловой ориентации самолёта на трассах и приаэродромных зонах при лётных испытаниях пилотажно-навигационного оборудования и система для его осуществления
Пьезоэлектрический акселерометр
Лигатура для титановых сплавов
Способ получения наноструктурированного конгломерированного порошкового материала для нанесения покрытий методами газодинамического и газотермического напыления
Устройство для получения и хранения атомарного водорода
Способ преобразования энергии ионизирующего излучения в электрическую энергию
Комбинированный гидроакустический приемник
Способ получения и хранения атомарного водорода
Устройство для контроля подводного шума плавсредства
Композиционный порошок на основе нитрида кремния
Способ получения композиционного армированного порошкового материала

