Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области судовождения - автоматическому управлению движением судна по заданному маршруту.
Известен способ автоматического управления движением судна по заданному путевому углу, реализованный в «Системе автоматического управления судном» (патент RU №2240953 С1, БИ №33, 27.11.2004 г.). Способ управления движением судна основан на использовании информации от приемника спутниковой навигационной системы, датчика угловой скорости, блока заданного значения путевого угла и сумматора, в котором по сигналам: текущего путевого угла, заданного путевого угла и угловой скорости судна формируется сигнал для управления рулевым приводом судна.
Известен также способ автоматического управления движением судна (патент RU 2292289 С1, БИ №3, 27.01.2007 г., принятый нами в качестве прототипа), в котором автоматическое управление движением судна осуществляется (аналогично описанному выше) с использованием: сумматора, рулевого привода, блока выработки угловой скорости, датчика руля, приемника спутниковой навигационной системы, блока заданного путевого угла. В способе управления движением судна корректируется заданное значение путевого угла в процессе плавания из точки «А» в точку «Б», затем «В»… по заданному маршруту.
Известные способы автоматического управления движением по заданной траектории обеспечивают точное движение к заданной точке. Однако серьезными недостатками рассмотренных способов управления движением судна по заданной траектории от точек «А» к точке «Б», затем «В»… являются:
- применение закона стабилизации судна на заданном направлении с использованием только кормового рулевого привода,
- при появлении поперечных возмущающих силовых воздействий, а также управляющих моментов, создается большой угол дрейфа судна, что приводит к уходу с заданной траектории движения и потерям в крейсерской скорости хода судна.
- затруднен проход судном узкостей из-за появления существенного угла дрейфа вблизи точек «А», «Б»… .
Приведенный ниже способ управления лишен этих недостатков, т.к. обеспечивает движение судна практически с нулевым углом дрейфа и нулевым поперечным уходом с заданной траектории движения.
Техническим результатом предлагаемого способа автоматического управления движением судна является:
- формирование управления судном кормовым рулевым приводом только по заданному углу курса и угловой скорости (при этом угол дрейфа и бокового сноса судна поддерживаются близкими к нулю подсистемой стабилизации нулевого дрейфа),
- минимизация отклонения судна от заданной траектории (в поперечном направлении),
- повышение крейсерской скорости хода судна (благодаря снижению сопротивления движению судна - β≈0),
- повышение безопасности проводки судна в узкостях (т.к. практически исключается боковое смещение судна при наличии поперечных управляющих и возмущающих сил).
Технический результат достигается благодаря:
- введению подсистемы стабилизации судна в поперечном направлении (в поперечном направлении подруливающее устройство или носовые рули в подсистеме стабилизации нулевого дрейфа автоматически устраняют угол дрейфа β и боковой снос У, даже при появлении поперечных сил, действующих на судно, β≈0 и У≈0),
- использованию кормового рулевого привода для управления судном только по углу курса.
Предлагаемый способ управления движением судна по заданной траектории (углу курса) осуществляется кормовым рулевым приводом с использованием: датчика руля δ, датчика угловой скорости ω, датчика курса ϕ и задатчика угла курса φзд. и сумматор на выходе которого формируется закон управления рулевым приводом вида:

где: δ - угол перекладки руля,
φ, φзд. - угол курса и заданный угол курса,
ω - угловая скорость судна,
К1, К2, К3 - коэффициенты регулирования.
Сигнал вида d/dt δ (1) вводится с выхода сумматора на вход рулевого привода. Это обеспечивает автоматическое управление движением судна по заданному углу курса.
Отличительной особенностью рассматриваемого способа является использование подсистемы стабилизации судна в поперечном направлении, включающей: второй сумматор, блок суммирования, приемник спутниковой навигационной системы, интегратор и подруливающее устройство для формирования и поддержания угла дрейфа и бокового сноса судна близким к нулю. В этом случае производная поперечной управляющей силы - dP/dt, создаваемая во втором сумматоре, - формируется в виде:
 ,
,
где Р - поперечная управляющая сила, создаваемая на выходе подруливающего устройства,
β - угол дрейфа судна, вырабатываемый на выходе блока суммирования,
К2∫βdt - интеграл по времени от угла дрейфа - боковое смещение судна У, вырабатываемое на выходе интегратора,
К1, К2, К3 - коэффициенты регулирования.
Сигнал угла дрейфа - β формируется в блоке суммирования с использованием сигналов с приемника спутниковой навигационной системы, на выходе которой вырабатывается путевой угол - ПУ, и датчика угла курса - φ, на выходе которого вырабатывается угол курса - φ:

Боковое смещение судна - У формируется в интеграторе, на вход которого вводится сигнал угла дрейфа - β из суммирующего устройства:
 .
.
Сигнал производной поперечной управляющей силы -  , сформированный по зависимости (2) на выходе второго сумматора, поступает на вход подруливающего устройства, на выходе которого создается поперечная управляющая сила - Р, которая обеспечивает движение судна по заданной траектории с углом дрейфа и боковым сносом, близким к нулю.
, сформированный по зависимости (2) на выходе второго сумматора, поступает на вход подруливающего устройства, на выходе которого создается поперечная управляющая сила - Р, которая обеспечивает движение судна по заданной траектории с углом дрейфа и боковым сносом, близким к нулю.
Система автоматического управления движением судна по заданной траектории
Рассмотрим работу системы автоматического управления движением судна по заданной траектории, структура которой разработана с использованием предлагаемого способа управления движением судна по заданной траектории (с текущим углом дрейфа β≈0 и поперечным отклонением судна от заданной траектории У≈0 даже при наличии поперечных возмущающих сил, воздействующих на судно).
Система содержит: 1 - задатчик угла курса, 2 - датчик угла курса, 3 - датчик руля, 4 - первый сумматор, 5 - датчик угловой скорости (ДУС), 6 - рулевой привод, 7 - приемник спутниковой навигационной системы (СНС), 8 - блок суммирования, 9 - интегратор, 10 - второй сумматор, 11 - подруливающее устройство, 12 - объект управления - судно. Все связи между блоками системы приведены на фигуре. Реализация предлагаемой системы может быть осуществлена с использованием микросхем типа 140 УД-6 и 140 УД-8:
- сумматоры 4, 10,
- интегратор 9.
Датчик угловой скорости 5 - типовой датчик угловой скорости ДУС-5 с чувствительностью не ниже 0,05 гр/с. Задатчик угла курса 1 - программный блок формирования сигнала заданного значения угла курса для движения по заданной траектории от точки А к точке Б… . Датчик угла курса 2 - гирокомпас типа «Гиря». Штатные судовые системы:
- приемник СНС 7,
- рулевой привод 6,
- подруливающее устройство 11.
Система автоматически обеспечивает движение корабля по заданной траектории. На вход первого сумматора 4 поступают сигналы:
- угловой скорости судна ω - с датчика угловой скорости 5,
- угла перекладки руля δ - с датчика руля 3,
- текущего угла курса φ - с датчика угла курса 2,
- заданного угла курса φзд. - с задатчика угла курса 1.
На выходе первого сумматора 4 формируется заданное значение угловой скорости перекладки кормового руля d/dt δзд. (или угла перекладки кормового руля - δзд. в зависимости от типа рулевой машины).
В соответствии с зависимостью (1) руль будет автоматически перекладываться и обеспечивать удержание судна с углом курса, равным заданному углу курса:
φ=φзд.,
Одновременно осуществляется стабилизация судна на нулевом угле дрейфа и с нулевым поперечным смещением относительно заданной траектории движения. Это достигается благодаря использованию подсистемы стабилизации судна в поперечном направлении.
На выходе (подсистемы стабилизации судна в поперечном направлении) в подруливающем устройстве - 11 формируется управляющее воздействие на судно в виде поперечной управляющей силы - Р. Закон управления подруливающим устройством - 11 формируется во втором сумматоре - 10 в соответствии с зависимостью (2).
Сигналы, поступающие на вход второго сумматора - 10:
- угол дрейфа β формируется в соответствии с зависимостью (3) в блоке суммирования 8, на вход которого вводится сигнал текущего угла курса - φ из датчика угла курса 2 и сигнал текущего путевого угла - ПУ из приемника спутниковой навигационной системы - 7,
- боковой снос - У формируется на выходе интегратора - 9, на вход которого поступает сигнал - β с выхода блока суммирования - 8,
- поперечная управляющая сила - P с выхода подруливающего устройства - 11.
С выхода второго сумматора - 10 сигнал производной поперечной управляющей силы  поступает на вход подруливающего устройства - 11, обеспечивая тем самым поддержание нулевого дрейфа и нулевого поперечного смещения судна относительно заданной траектории даже при наличии поперечной силы, действующей на судно.
поступает на вход подруливающего устройства - 11, обеспечивая тем самым поддержание нулевого дрейфа и нулевого поперечного смещения судна относительно заданной траектории даже при наличии поперечной силы, действующей на судно.
Моделирование рассмотренного выше способа автоматического управления движением судна, в котором обеспечивается стабилизация нулевого угла дрейфа и нулевого бокового сноса, подтвердило его работоспособность, а следовательно, и высокую эффективность использования предложенного способа управления движением судна по заданной траектории особенно при наличии поперечных сил, воздействующих на судно.
Способ управления движением судна по заданной траектории, характеризующийся тем, что используют датчик руля δ, датчик угловой скорости ω, датчик курса ϕ, задатчик угла курса ϕ и первый сумматор, на выходе которого формируют сигнал управления рулевым приводом d/dt δ, который вводят на вход рулевого привода, на вход первого сумматора вводятся сигналы:угла перекладки руля δ с датчика руля,угловой скорости ω с датчика угловой скорости,угла курса ϕ с датчика курса,заданного угла курса ϕ с задатчика угла курса,отличающийся тем, что используют второй сумматор, блок суммирования, приемник спутниковой навигационной системы, интегратор и подруливающее устройство, на вход которого вводят сигнал производной поперечной силы / с выхода второго сумматора, на вход последнего поступают сигналы:угла дрейфа β из блока суммирования, на вход последнего вводят сигналы угла курса ϕ из датчика курса и путевого угла ПУ из приемника спутниковой навигационной системы,бокового смещения судна У из интегратора, на вход которого вводят сигнал угла дрейфа β из блока суммирования.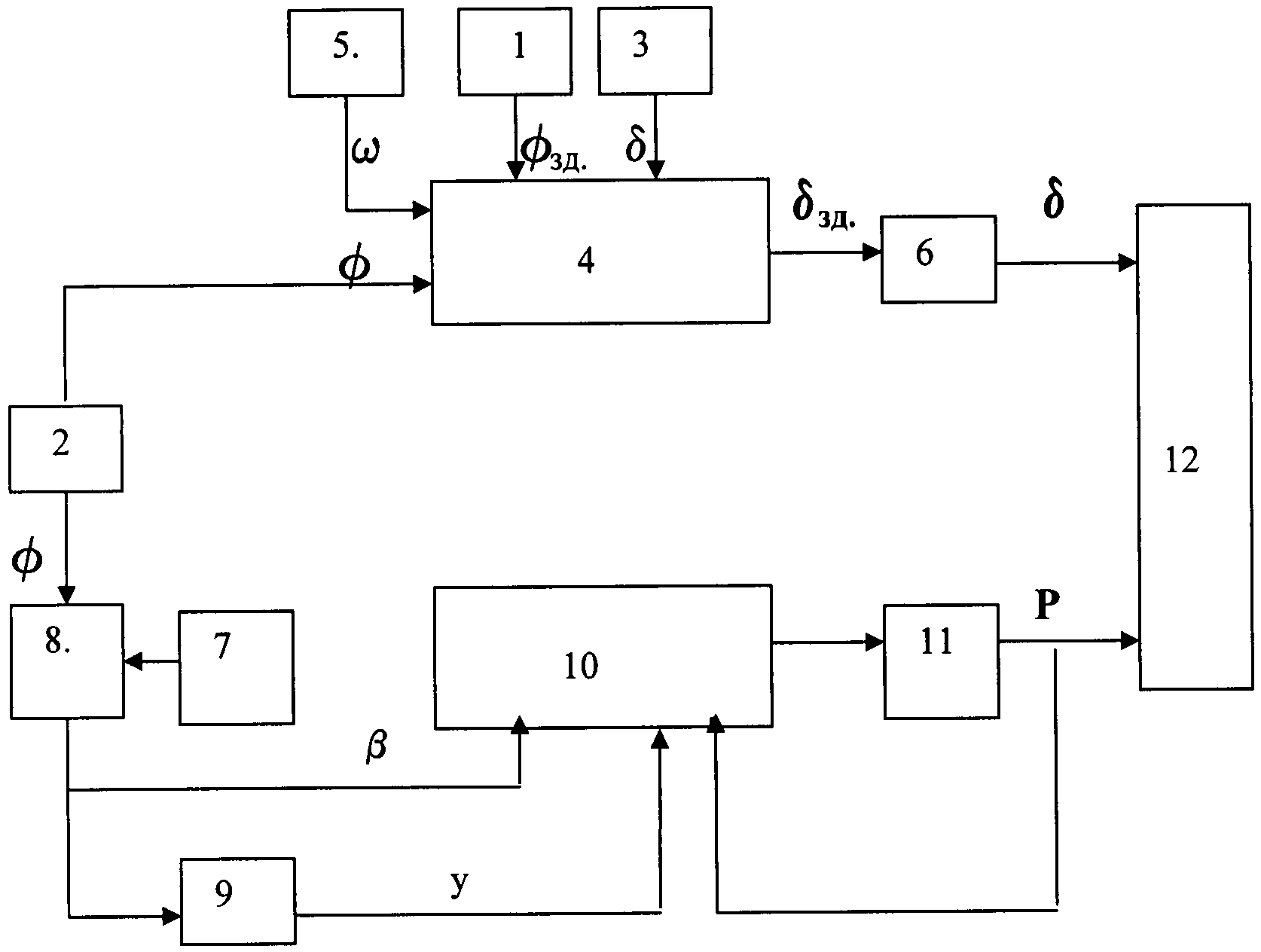
Магниторезистивный преобразователь
Устройство для формирования траектории перевода судна на новый курс
Способ управления движением судна с компенсацией медленно меняющихся возмущений
Счетчик-расходомер газа
Холодильно-технологический комплекс для предварительного охлаждения и временного хранения рыбы
Способ автоматического управления движением судна с учетом волнения
Способ отказоустойчивого управления движением корабля по глубине
Устройство для формирования траектории перевода судна на параллельный курс с соблюдением ограничений на диапазон изменения сигнала управления
Способ управления движением судна по широте и долготе
Способ определения зачетных натурных испытаний сложного технического комплекса средств вооружения корабля
Магниторезистивный преобразователь
Устройство для формирования траектории перевода судна на новый курс
Способ управления движением судна с компенсацией медленно меняющихся возмущений
Счетчик-расходомер газа
Холодильно-технологический комплекс для предварительного охлаждения и временного хранения рыбы
Способ автоматического управления движением судна с учетом волнения
Способ отказоустойчивого управления движением корабля по глубине
Устройство для формирования траектории перевода судна на параллельный курс с соблюдением ограничений на диапазон изменения сигнала управления
Способ управления движением судна по широте и долготе
Способ определения зачетных натурных испытаний сложного технического комплекса средств вооружения корабля

