Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ПЛАВУЧЕСТЬЮ ПОДВОДНОГО АППАРАТА РОБОТА-ЗОНДА
Вид РИД
Изобретение
Изобретение относится к технике подводных исследований в океанологии, океанографии и синоптике. Оно может быть использовано при создании и разработке гидрологических, синоптических и океанологических подводных аппаратов-глайдеров, автоматических сканирующих роботов-зондов и автоматических гидрологических буев, а также техники спасения под водой.
Известен способ управления плавучестью подводного аппарата [1], заключающийся в изменения его водоизмещения путем принятия или откачивания жидкости в балластную емкость, предварительно заполненную газом под давлением на рабочем горизонте. Известно, также, и устройство осуществления этого способа [1], содержащее балластную эластичную емкость, рабочую жидкость и насос для перекачивания жидкости.
Известные способ и устройство предназначены для работы лишь на заданном горизонте и не пригодны для значительных вертикальных перемещений, так как требуют значительного запаса электрической энергии для перекачивания жидкости при вертикальных маневрах. Это является серьезным недостатком и ограничивает применимость известных решений.
Наиболее близким предлагаемому является решение [2] - способ управления плавучестью подводного аппарата, заключающийся в изменении его водоизмещения путем воздействия на управляемую геометрию водоизмещающего объема давлением газа. Известно и устройство для его осуществления [2], включающее корпус с прочной цилиндрической камерой, содержащей генератор газового давления с управляемым клапаном разгрузки и поршень, перемещающиеся под давлением.
Известное решение также не свободно от недостатков, так как его генератор зависит от температурного градиента верхних и нижних слоев морских вод, который требует большого времени для прогрева газогенератора. При сезонном падении градиента (в зимние месяцы), известное решение может быть, вообще, не употребимо. Не употребимо оно также в высоких широтах, где температура верхних слоев воды не велика даже летом, не говоря уже о ледовитых морях и океанах. Величина управляемого водоизмещения здесь зависит от конечной температуры верхнего слоя воды.
Предлагаемое решение позволяет избежать указанных недостатков связанных с термической зависимостью от температуры окружающей воды, а также получать значительный выигрыш в величине управляемого водоизмещения.
Поставленная цель достигается тем, что в известном способе управления плавучестью подводного аппарата, заключающимся в изменении его водоизмещения путем воздействия на изменяемую (управляемую) геометрию водоизмещающего объема давлением газа, увеличивая плавучесть - увеличивают водоизмещающий объем давлением пороховых газов, сжигая в этом объеме навеску пороха, а уменьшая плавучесть, уменьшают объем, стравливая из него газ.
Увеличенный давлением пороховых газов водоизмещающий объем фиксируют жесткой управляемой геометрией объема, при этом часть энергии давления расширения пороховых газов аккумулируют в энергию деформации возвратной пружины, а при уменьшении плавучести освобождают фиксацию объема и выдавливают газ наружу через управляемый клапан разгрузки силой возвратной пружины.
Для осуществления способа применяют устройство - робот-зонд, включающий корпус с прочной цилиндрической камерой, содержащей генератор газового давления с управляемым клапаном разгрузки и поршень, перемещающиеся под давлением, который опирается, с одной стороны, на возвратную пружину, размещенную между поршнем и торцевой стенкой в цилиндрической камере, в которой выполнено отверстие для сообщения с забортной водой, а с другой стороны поршня смонтирован пороховой газогенератор давления в виде кругового барабана с пороховыми патронами и механизмом инициации их воспламенения, по команде микроконтроллера управления циклами погружения-всплытия, при этом для фиксации поршня в верхней точке установлен пружинный фиксатор.
Круговой барабан выполнен в виде револьверного привода смены патронов за счет реактивной силы пороховых газов, а для инициации ружейного капсюля в патроне применен электромагнитный ударный боек.
Возможность реализации.
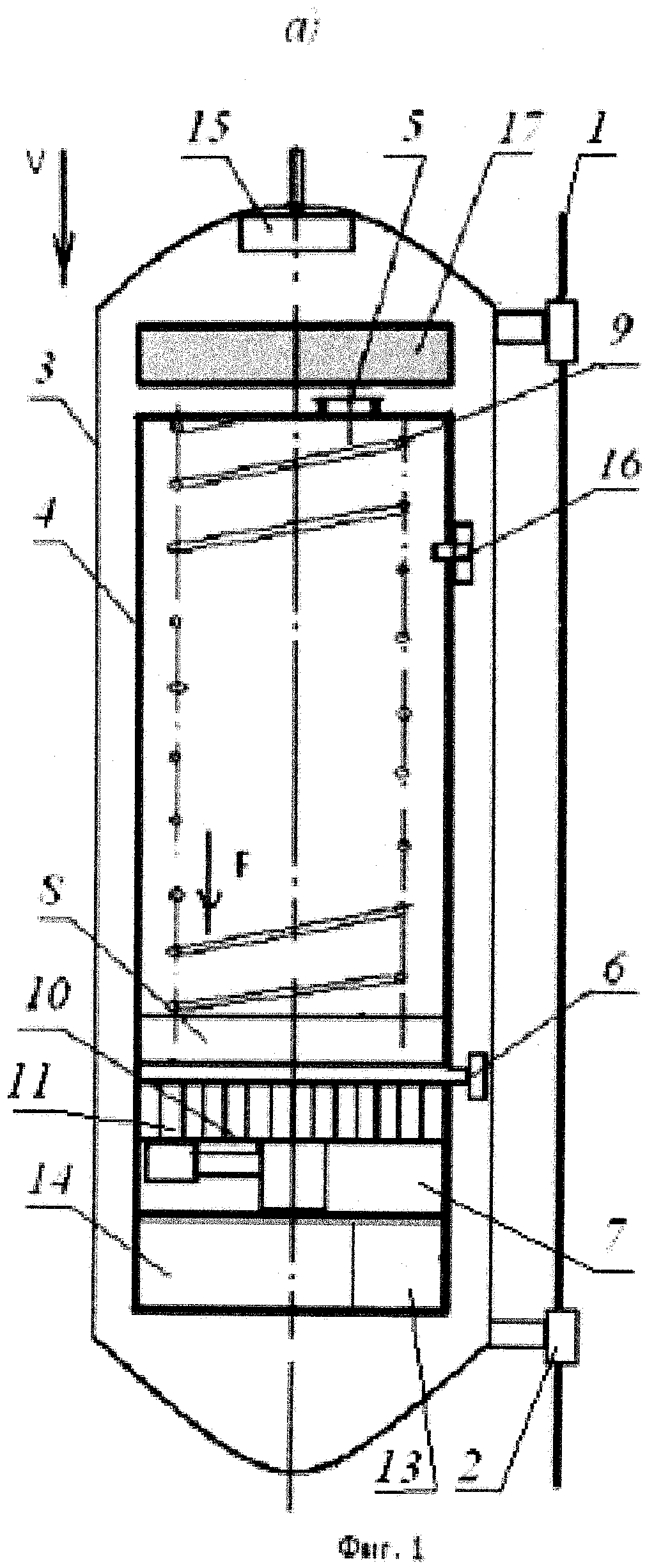
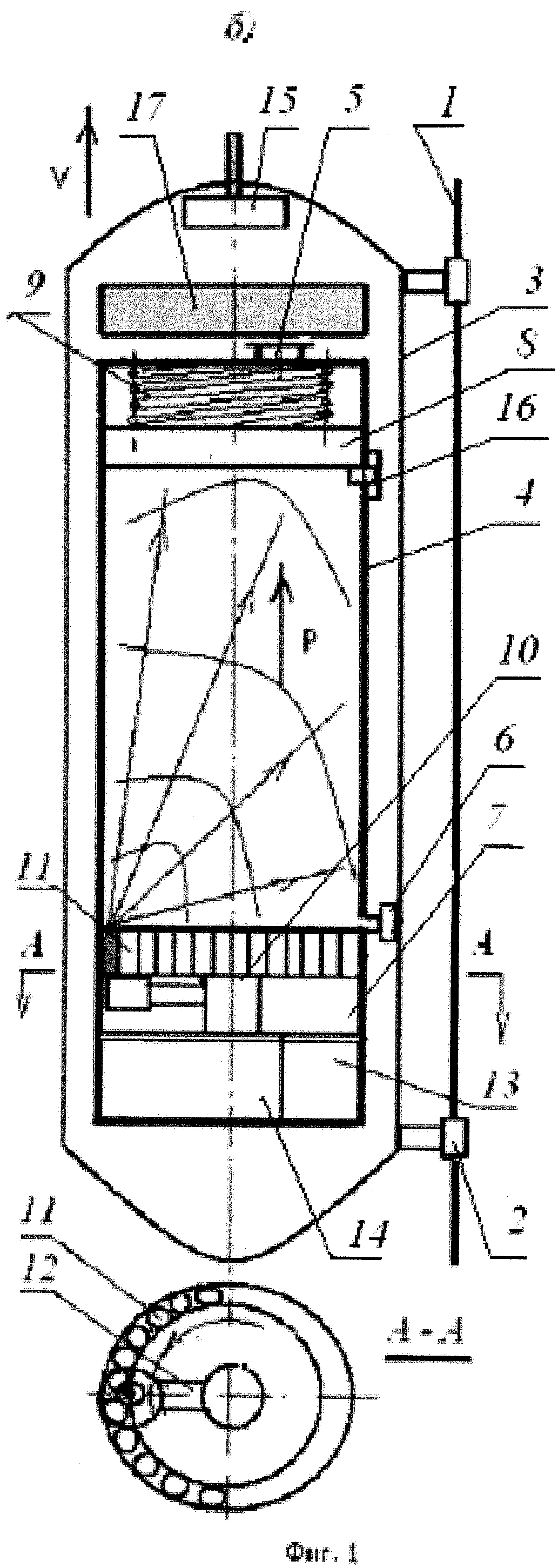
Сущность изобретения разъясняется схематичным чертежом Фиг.1а и б, где показана работа подводного аппарата робота-зонда с блоком управляемой плавучести: а) в режиме погружения и б) в режиме всплытия. Здесь стрелками V показано направление движения сканирующего подводного аппарата вдоль троса 1, проходящего в направляющих 2. В корпусе аппарата 3 закреплена прочная цилиндрическая камера 4 с дренажным отверстием 5 в верхней стенке и управляемым клапаном разгрузки 6 для сброса давления, производимого газогенератором 7, действующим на поршень 8, который с другой стороны опирается на возвратную пружину 9. Пороховой газогенератор давления 7 выполнен в виде кругового барабана 10 с пороховыми патронами 11 и устройством инициации воспламенения 12, которое может быть ударным электромагнитным или посредством ружейного капсюля в патроне. Инициация воспламенения осуществляется по команде микроконтроллера 13 управляющего циклами погружения-всплытия робота-зонда. Блок электропитания 14 обеспечивает питанием микроконтроллер 13, блок 15 зондирующих датчиков: температуры, давления и солености, а также устройство инициации. В верхней части цилиндрической камеры выполнен пружинный фиксатор 16 поршня в верхней точке, а над камерой в корпусе робота-зонда расположена уравновешивающая плавучесть 17.
Способ управления плавучестью подводного аппарата робота-зонда работает следующим образом. Аппарат, нанизанный на трос 1 в направляющих 2, сканирует вдоль троса, между якорем на дне и поплавком на поверхности воды под действием переменной разности сил веса и водоизмещения. При этом изначально его вес в воде G≥W - водоизмещения. Что обеспечивает движение аппарата вниз - ко дну. При достижении определенной глубины датчик давления 15 вырабатывает сигнал на микроконтроллер 13, который через устройство инициации 12 воспламеняет пороховую навеску в одном из патронов 11, расположенном в обойме газогенератора 10. Пороховые газы, обладая высокой температурой и давлением, заполняя объем под поршнем 8, воздействуют на него давлением и перемещают его в камере (Фиг.1б), сжимая возвратную пружину 9, на которую поршень опирается с другой стороны. Сжав пружину 9, поршень 8 фиксируется фиксатором 16, для удержания его в верхней точке, если давление пороховых газов упадет вследствие длительного охлаждения в процессе всплытия, например, глайдера. Перемещаясь, поршень преодолевает гидростатическое давление воды на горизонте дна и выдавливает ее через дренажное отверстие 5. С этого момента водоизмещение больше веса G≤W и робот-зонд начинает движение вверх до следующей команды датчика давления о достижении верхнего горизонта. После чего микроконтроллер открывает фиксатор 16 и одновременно открывает управляемый клапан разгрузки 6 для стравливания давления пороговых газов. После падения давления в камере 4 возвратная пружина 9 силой F≥F трения перемещает поршень 8 в нижнее положение, а микроконтроллер закрывает клапан 6. С этого момента вес аппарата в воде становится больше его водоизмещения G≥W, и он начинает погружаться. Для того чтобы аппарат погружался на скорости удобной для измерений (до 1 м/с) по вертикали, его вес в воде G должен превышать водоизмещение W, как правило, от 0,1 до 0,5 кг в зависимости от сопротивления формы корпуса. Для всплытия необходимо, соответственно, такое же избыточное водоизмещение. Для изменения водоизмещения поршень должен увеличить объем камеры на величину W, совершая при этом работу A против сил гидростатического давления P, которая равна энергии от сгорания g грамм пороха с удельной энергией q:
A=P×W=Q=q×g.
Например, для сканирования реального «разреза» - толщи воды по вертикали глубиной 0,5 км, 1 км и 2 км роботом-зондом с газогенератором на основе бездымного пироксилинового пороха и удельной энергией взрыва q=1300 кал/г, для изменения водоизмещения на 1 кг (≈1 л) потребуются навески, соответственно 0,9 г, 1,8 г и 3,6 г. Поршень, при сгорании этой навески, совершит перемещение и увеличит водоизмещение на 1000 см3. Однако следует заметить, что не вся выделенная сгоранием энергия идет на совершение внешней работы. Небольшая часть тепловой энергии 3-5% остается внутренней энергией пороховых газов. Ввиду ее малости на практике не учитывается, хотя из соображений запаса, навески следует взять: 1 г, 2 г и 4 г соответственно.
Патроны для газогенератора могут изготавливаться в специальных металлических гильзах, снабженных ударным или электроразрядным воспламенителем. Порох может быть, например, бездымный пироксилиновый ГОСТ 8660-80, или дымный охотничий, или артиллерийский. На практике требуются исследования на различных и меньших глубинах, тогда для целей газогенерации могут быть использованы холостые патроны охотничьих и армейских боеприпасов. В качестве устройства замены использованных зарядов для последующих циклов, может быть использовано такое же устройство, как в автоматическом самозарядном оружии. Таких надежных конструкций разработано множество, например револьверная система нагана (Webley-Fosbery), где реакция (отдача) истекающих газов используется для привода перезарядки. После завершения выполнения цикла работы заменяют обойму патронов в газогенераторе, и робот-зонд снова может совершать циклы погружений. Практическое изготовление цилиндрической камеры 4 и поршня 8 не представляют трудностей. Цилиндрическая камера может быть выполнена из нержавеющей трубы ГОСТ 9940-81 из материала 08Х18Н10Т, а поршень из сплава АМГ-6, легкий корпус 3 из стеклопластика на основе смолы ЭД-20, плавучесть 17 из сферопластика типа «Синтактик» или полистирольного пенопласта марки ПС; пружина, соответственно, из пружинной стали 65Г ГОСТ 14959-79 и покрашена корабельным суриком; микроконтроллер 13 может быть от фирмы Atmel Corp типа L293D, который соединяется с датчиками 15, управляемым клапаном 6 и фиксатором 16 водостойким кабелем через герморазъемы. Датчик давления 15 может быть выбран из серии РМР4000, а электромагнитный управляемый клапан 6 - фирмы Integrated Hydraulics серии S201. Аккумуляторная батарея 14 (например, из числа промышленных батарей никель-металлогидридных типа GP-1300FH-B), как и микроконтроллер 13, размещаются в прочном корпусе под защитой от горячих пороховых газов. Предлагаемое изобретение по сравнению с известными обладает значительной простотой и дешевизной, что позволяет резко снизить затраты на создание экспериментальной базы, а следовательно, позволит повысить эффективность научных исследований, обеспечивая их высокую производительность.
Источники информации
1. АС СССР №1519102 B63B 21/52 от 26.11.87 г.
2. Патент ФР №2124457 B63B 22/00; B63G 8/24 от 10.01.99 г.
Локационный уровнемер
Способ добычи газовых гидратных углеводородов со дна водных бассейнов и устройство для его реализации
Кардиомонитор
Устройство для регистрации инфранизкочастотных колебаний в морской воде
Способ гидролокации с высоким разрешением и устройство для его реализации
Вертикальный опытовый бассейн
Локационный уровнемер
Кардиомонитор
Маневровый телеуправляемый подводный аппарат

