Результат интеллектуальной деятельности: СПОСОБ ИДЕНТИФИКАЦИИ МАТЕРИАЛА В НАСЫПНОМ ВИДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Группа изобретений относится к нанотехнологическому оборудованию и предназначена для идентификации материалов в насыпном виде (то есть для отнесения его к одному из заранее известных классов) и экспресс-контроля микромеханических, реологических и микроэлектромеханических характеристик продукции, их стабильности на разных стадиях производства продукта и отклонений от эталонных образцов.
Известен способ и аппарат для определения упругой части работы при индентированиии поверхности материала на заданную глубину (Заявка США №2009/ 0193881, МПК G01N 3/48, G01B 5/18, 2009 г.). Способ может включать: подвод индентора к поверхности образца; индентирование образца на глубину, большую заданной, посредством увеличивающейся нормальной силы, приложенной к индентору, и запись зависимости силы от глубины; разгрузку индентора уменьшающейся силой и запись зависимости силы от глубины; вычисление упругой части работы на основе полученных зависимостей.
Такой способ предназначен для исследования упругой части работы при индентированиии поверхности твердого материала на заданную глубину и непригоден для идентификации тонких порошков и пудр, применяемых в нанотехнологии, из-за слабого агрегирования частиц порошкообразного материала.
Известен также способ измерения величины адгезии твердой тонкой пленки к мягкой подложке с использованием наноиндентирования (патент США №6339958 B1 G01N 3/24, 2002. Согласно патенту к индентору прикладывается растущая нагрузка. На первом этапе нагружения под действием индентора пленка вдавливается в подложку, что вызывает упругие напряжения на поверхности раздела пленки и подложки. При достижении критической нагрузки напряжения на поверхности раздела превышают порог отслаивания и пленка частично отрывается от подложки, что приводит к скачкообразному увеличению скорости погружения индентора в мягкую подложку. Компьютерная обработка данных, полученных с датчиков приложенной силы и смещения, позволяет определить эту критическую силу, при которой происходит отслаивание пленки по изменению скорости погружения индентора. Дальнейшая обработка данных позволяет вычислить из порогового значения приложенной силы критические напряжения отслаивания, энергию и силу адгезии между пленкой и подложкой. Методика индентирования позволяет выполнять измерения адгезии на специальном тестовом участке пленки, не повреждая остальную часть пленки. Таким образом, данный метод позволяет проводить неразрушающие in situ измерения силы адгезии на тонких пленках и элементах микроэлектроники.
Однако такой способ предназначен для измерения энергии и силы адгезии тонкой твердой пленки к мягкой подложке и не пригоден для идентификации тонких порошков и пудр, применяемых в нанотехнологии, из-за слабого агрегатирования частиц порошкообразного материала.
Известен магнитно-силовой микроскоп с переменным магнитом (патент РФ №2276794, МПК G01R 33/12, 2006), содержащий блок управления, держатель зондового датчика с зондовым датчиком и держатель образца, установленные с возможностью взаимного перемещения, а также переменный магнит, включающий магнитопровод с полюсными наконечниками и, по крайней мере, один из полюсных наконечников встроен в держатель образца и, по крайней мере, один полюсный наконечник пространственно отделен от магнитопровода. В держатель образца может быть встроен пространственно отделенный полюсный наконечник магнитопровода, при этом другой полюсный наконечник магнитопровода установлен таким образом, что зондовый датчик будет расположен между полюсными наконечниками магнитопровода. В держатель образца могут быть встроены оба полюсных наконечника, причем оба полюсных наконечника пространственно отделены от магнитопровода.
Такой микроскоп обеспечивает позиционирование исследуемого образца относительно зондового датчика в силовом магнитном поле, прикладываемого к образцу, и с помощью сканера по командам блока управления перемещает образец относительно зонда. При этом магнитная структура образца определяется величиной магнитного поля в образце, которое задается с помощью соленоида, магнитопровода с первым и вторым полюсными наконечниками. Из этого следует, что с помощью магнитно-силового микроскопа с переменным магнитом можно исследовать и идентифицировать только порошки с магнитными свойствами.
Известен аппарат для измерения остаточного напряжения в пленочных материалах (патент США №6851300, МПК G01N 3/00, 2005). Аппарат включает корпус, нагружающее устройство, соединенное с устройством его подвода к исследуемому материалу, датчик величины нагружения для непрерывного измерения вариации нагружения, прилагаемого к держателю индентора, выполненного в виде конуса или пирамиды, датчик смещения для непрерывного измерения вариации глубины погружения индентора в материал и компьютер, обеспеченный программой измерения остаточного напряжения на основе значений, измеренных датчиком нагрузки и датчиком смещения. Держатель индентора закреплен на ползунке, установленном в пазах корпуса и соединенным с приводом горизонтального перемещения.
Существующее изобретение позволяет оценить механические свойства материала и является неразрушающим. Изобретение применимо для измерений в пределах микроскопической области для тонких пленок или микроустройств в структурах большого размера, посредством управления величиной прикладываемой нагрузки. Данный измерительный прибор (его рабочий ход) минимизирован в объеме для облегчения адаптации к фактической структуре. Чтобы измерить остаточное напряжение различных материалов независимо от размера и типа объекта аппарат комплектуется различными устройствами для присоединения инструмента. Измерительный прибор аппарата выполнен горизонтально подвижным, что исключает необходимость его перемещения для проведения измерений в нескольких положениях или нескольких материалов. Однако такое устройство предназначено для исследования остаточного напряжения пленочного материла и непригодно для идентификации тонких порошков и пудр, применяемых в нанотехнологии, из-за слабого агрегатирования частиц порошкообразного материала.
Задачей изобретения является создание способа и прибора для идентификации материала в насыпном виде с разрешающей способностью, обеспечивающей использование его для идентификации наноматериалов в насыпном виде (то есть для отнесения его к одному из заранее известных классов) и к экспресс-контролю микромеханических, реологических и микроэлектромеханических характеристик продукции, их стабильности на разных стадиях производства продукта и отклонений от эталонных образцов.
Технический результат заключается в увеличении разрешения по отношению к физико-механическим свойствам насыпных нанопорошковых материалов и увеличении контролируемых параметров и свойств.
Задача решается по объекту - способу тем, что согласно способу идентификации материала в насыпном виде, при котором подводят наконечник индентора к исследуемому материалу, прикладывают увеличивающуюся нагрузку к индентору и с помощью преобразователя измеряют величину прикладываемой нагрузки и глубину проникновения зонда в этой точке, сведения о значениях прикладываемой нагрузки, которая соответствует увеличенной глубине проникновения зонда, согласно изобретению исследуемый материал в насыпном виде помещают в ячейку в виде цилиндрического гнезда и воздействуют на материал зондом в виде штока с плоским торцом, величину нагрузки при этом программируют и передают через контроллер на измерительно-силовую головку, включающую микронагружающее устройство, и измеряют глубину погружения прецизионным оптическим датчиком локальных деформаций и передают на компьютер первичные данные испытаний в виде зависимости абсолютной деформации h и электрического сопротивления R от приложенной силы Р, которые переводят из координат P-h в σ-ε, а из R-h в γ-ε, т.е. в зависимости напряжения сжатия σ и удельной электропроводности γ от относительной деформации ε, одновременно измеряют:
- жесткость С
C=∂P/∂h,
где Р - сила нагружения,
h - абсолютная деформация образца,
как функцию от давления
p=P/S,
где Р - сила нагружения,
S - площадь зонда;
- зависимость механического поведения (жесткость, вязкость) от скорости приложения нагрузки
∂P/∂t,
где Р - сила нагружения,
t - время;
- интегральное электрическое сопротивление R
R=U/I,
где U - напряжение на контактах образца,
I - сила тока, протекающая через образец;
- дифференциальное электрическое сопротивление R*
R*=∂U/∂I,
где U - напряжение на контактах образца,
I - сила тока, протекающая через образец;
- зависимость интегрального R и дифференциального R* электрических сопротивлений или электрической проводимости γ и γ* соответственно от приложенного давления p на стадии нагружения и разгрузки R=f(p) и R*=f(p) или γ=f(p) и γ*=f(p).
Помещение исследуемого материала в насыпном виде в ячейку в виде цилиндрического гнезда и воздействие на материал зондом в виде штока с плоским торцом, программирование величины нагрузки и передача через контроллер на измерительно-силовую головку, включающую микронагружающее устройство, при совместном измерении глубины погружения прецизионным оптическим датчиком локальных деформаций обеспечивают получение главной информации: зависимости абсолютной деформации от приложенной силы. Эти данные специфичны для различных видов порошкообразных продуктов, поэтому передача на компьютер первичных данные испытаний в виде зависимости абсолютной деформации h от приложенной силы Р, которые переводят из координат P-h в σ-ε, т.е. в зависимость напряжения сжатия от относительной деформации, обеспечивают надежную идентификацию различных насыпных материалов.
Задача решается по объекту - устройству тем, что в приборе для идентификации материала в насыпном виде, включающем корпус, нагружающее устройство, соединенное с устройством его подвода к исследуемому материалу, датчик величины нагружения для непрерывного измерения вариации нагружения, прилагаемого к держателю зонда, датчик смещения для непрерывного измерения вариации глубины погружения зонда в материал и компьютер для обработки потоков информации; нагружающее устройство выполнено в виде силовой ячейки и прецизионного оптического датчика измерения локальных деформаций образца, прибор дополнительно содержит контроллер для управления, сбора и обработки потоков данных, снабженный программным управлением величиной силы, а индентор выполнен в виде цилиндрического штока с плоским торцом и установленным над ячейкой с образцом, а ячейка содержит контакты для измерения электрического сопротивления.
Ячейка с образцом выполнена глубиной менее половины диаметра цилиндрической расточки D,
D=(1,1÷1,5)d, где
D - диаметр расточки,
d - диаметр зонда.
Выполнение нагружающего устройства в виде содержащей силовую ячейку и прецизионный оптический датчик измерения локальных деформаций измерительно-силовой головки, выполненной по магнитоэлектрической схеме, использование дополнительного контроллера для управления, сбора и обработки потоков данных, снабженного программным управлением величиной силы, и выполнение индентора в виде цилиндрического штока с плоским торцом и установленным над ячейкой с образцом обеспечивает:
- Возможность микродеформирования микропробы (m~1 мг) сжатием в квазиоднородных условиях;
- Одновременную регистрацию нескольких параметров;
- Возможность программного управления величиной силы нагружения;
- Возможность программного управления импульсом напряжения на контактах образца, как по форме, так и по длительности.
Все это обеспечивает возможность осуществления разнообразных режимов тестирования образцов, в том числе и в виде сложных функций от времени и глубины.
Выполнение ячейки для образца глубиной менее половины диаметра цилиндрической расточки D, D=(1,1÷1,5)d, где D - диаметр расточки, d - диаметр зонда, обеспечивает возможность микродеформирования микропробы (m~1 мг) сжатием в квазиоднородных условиях. При выбранных соотношениях диаметра ячейки и диаметра штока влияние стенок практически не сказывается на величине усилия сжатия. При значениях менее 1,1d это усилие может изменяться за счет влияния на усилие сжатия боковых стенок ячейки (т.н. «пробочный эффект»), при значениях более 1,5d снижается точность измерения, связанная со сложностью распределения слоя порошка по толщине.
На представленных чертежах изображены:
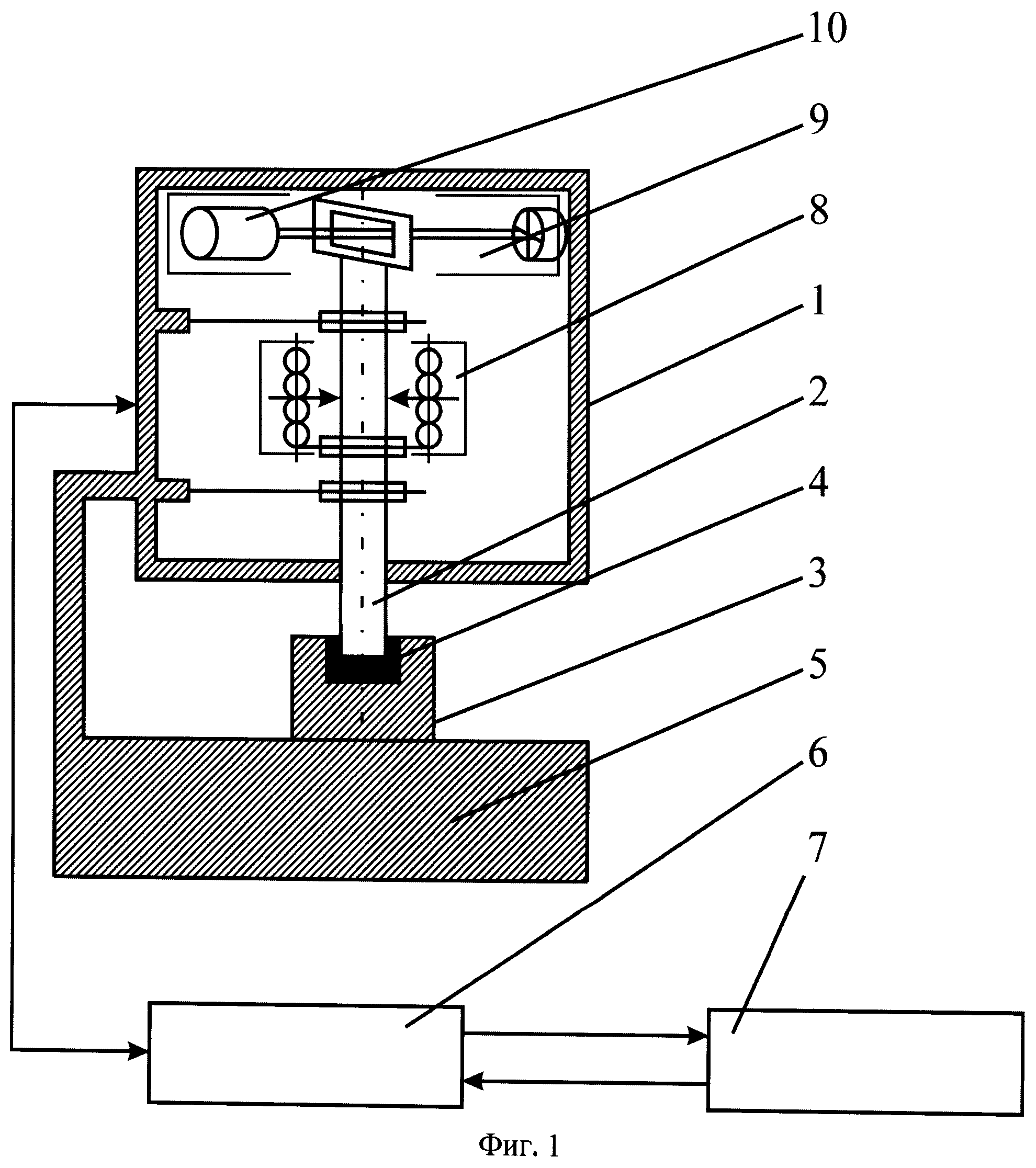
на фиг.1 показана схема прибора для идентификации материала в насыпном виде.
Перечень позиций:
1. измерительно-силовая головка;
2. цилиндрический шток с плоским торцом;
3. ячейка;
4. наноматериал в насыпном виде;
5. основание в виде платформы;
6. контроллер;
7. персональный компьютер;
8. микронагружающее устройство;
9. прецизионный оптический датчик измерения локальных деформаций;
10. лазер.
Способ идентификации материала в насыпном виде осуществляется следующим образом.
Микропробу наноматериала в насыпном виде 4 (в качестве примера рассматриваем углеродные нанотрубки - УНТ) помещают в ячейку 3, которую закрепляют на основании в виде платформы 5. Масса микропробы примерно 1 мг. Приводом микронагружающего устройства 8 измерительно-силовой головки 1 цилиндрический шток с плоским торцом 2 подводят к поверхности наноматериала 4. Затем приводом микронагружающего устройства 8 производят последовательно нагружение цилиндрического штока с плоским торцом 2 с нарастающей нагрузкой от 0 до 500 мН при первом и втором циклах нагружения образца задаваемыми персональным компьютером 7 через контроллер 6. Одновременно с нагружением образца измеряют величину абсолютной деформации h от приложения силы Р прецизионным оптическим датчиком измерения локальных деформаций 9. Первичные данные микромеханических испытаний, представленные в виде зависимостей абсолютной деформации h пробы и электрического сопротивления R от приложения силы Р, переводят из координат P-h в σ-ε, а из R-h в γ-ε, т.е. в зависимости напряжения сжатия σ и удельной электропроводности γ от относительной деформации, одновременно определяют:
- жесткость С
C=∂P/∂h,
где Р - сила нагружения,
h - абсолютная деформация образца,
как функцию от давления
p=P/S,
где Р - сила нагружения,
S - площадь зонда;
- зависимость механического поведения (жесткость, вязкость) от скорости приложения нагрузки
∂P/∂t,
где Р - сила нагружения,
t - время;
- интегральное электрическое сопротивление R
R=U/I,
где U - напряжение на контактах образца,
I - сила тока, протекающая через образец;
- дифференциальное электрическое сопротивление R*
R*=∂U/∂I,
где U - напряжение на контактах образца,
I - сила тока, протекающая через образец;
- зависимость интегрального R и дифференциального R* электрических сопротивлений или электрической проводимости γ и γ* соответственно от приложенного давления p на стадии нагружения и разгрузки R=f(p) и R*=f(p) или γ=f(p) и γ*=f(p).
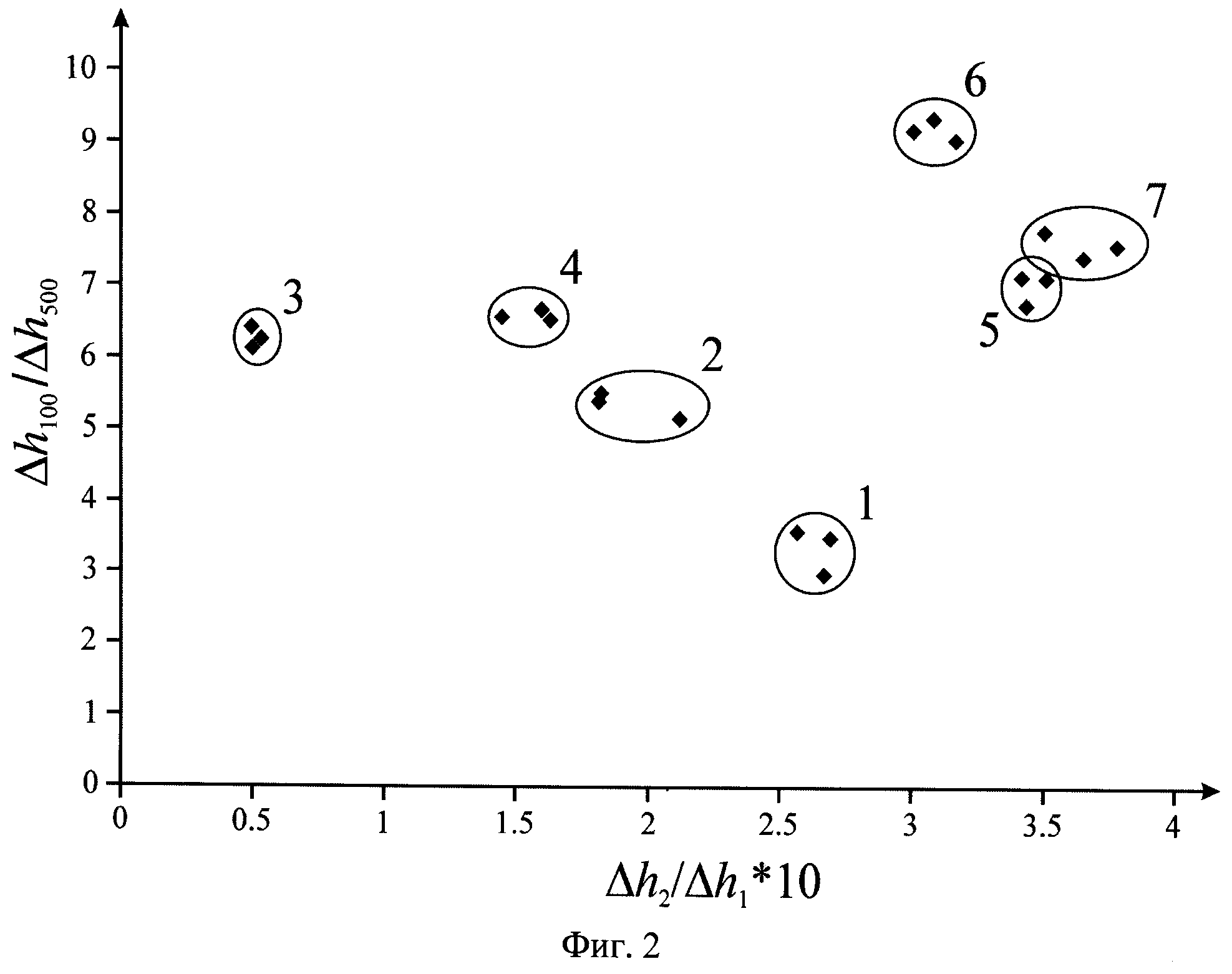
На основе анализа полученных зависимостей производят подбор таких комбинаций эмпирических параметров, которые позволяют разделять различные, в том числе близкие по структуре типы УНТ с достаточной селективностью. Результаты представлены в виде диаграммы (фиг.2), на которой отражены данные измерений для семи типов углеродных нанотрубок. Они отражены в двумерном пространстве, координатами которого являются отношения определенных отрезков на диаграмме нагружения:
x=Δh2/Δh1*10; у=Δh100/Δh500.
Эти комбинации построены на основе четырех характеристических значений деформации при достижении нарастающей нагрузкой значений 100 и 500 мН при первом и втором циклах нагружения образца.
На фиг.2 цифрами от 1 до 7 обозначены группы данных для семи образцов нанотрубок, каждый из которых был протестирован 3 раза.
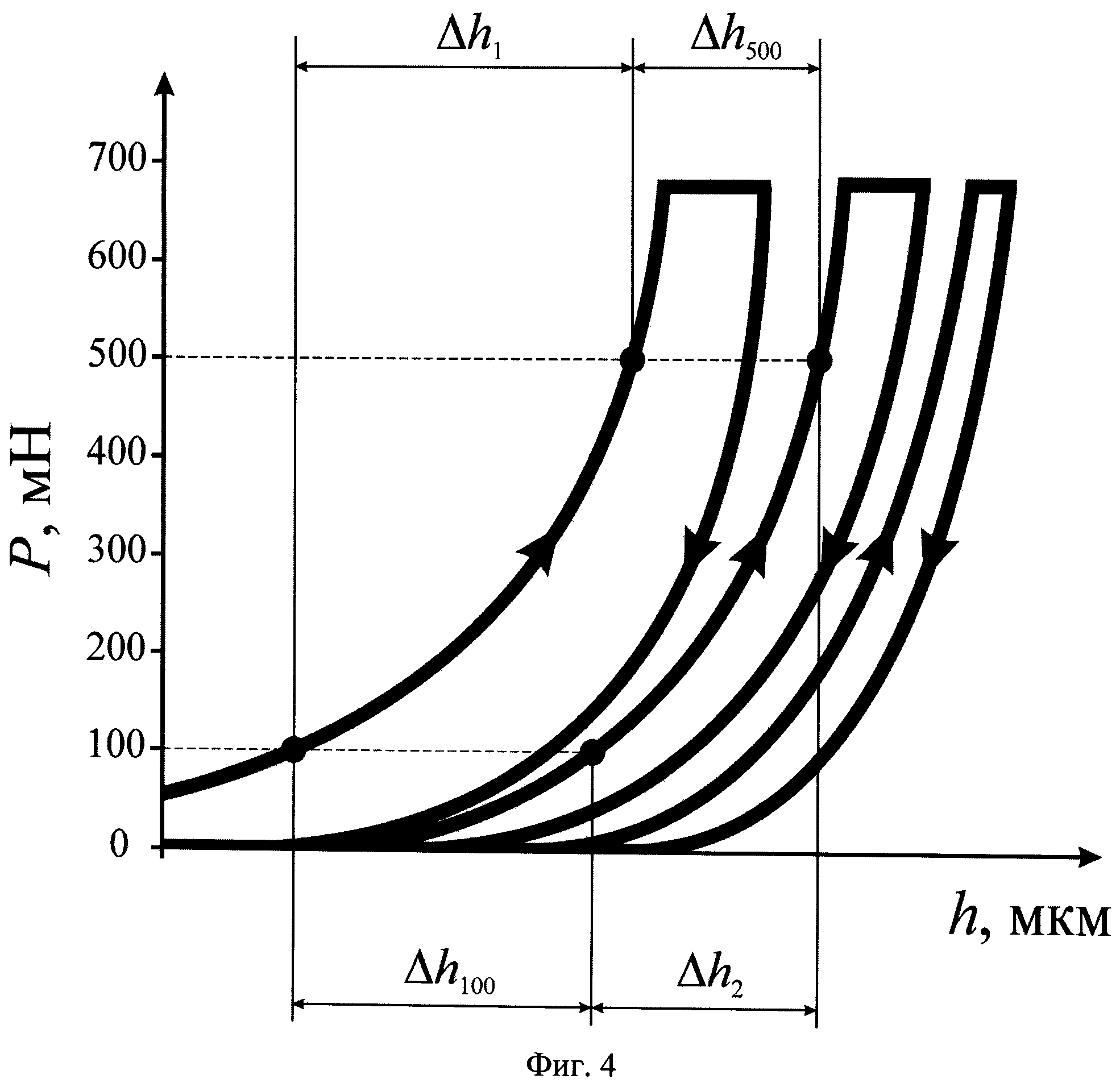
Результаты деформирования проб углеродных нанотрубок приведены на фиг.3, на которой показана типичная зависимость относительной деформации ε пробы УНТ 1 от напряжения σ. Цифрами от 1 до 3 обозначены номера циклов нагружения-разгрузки.
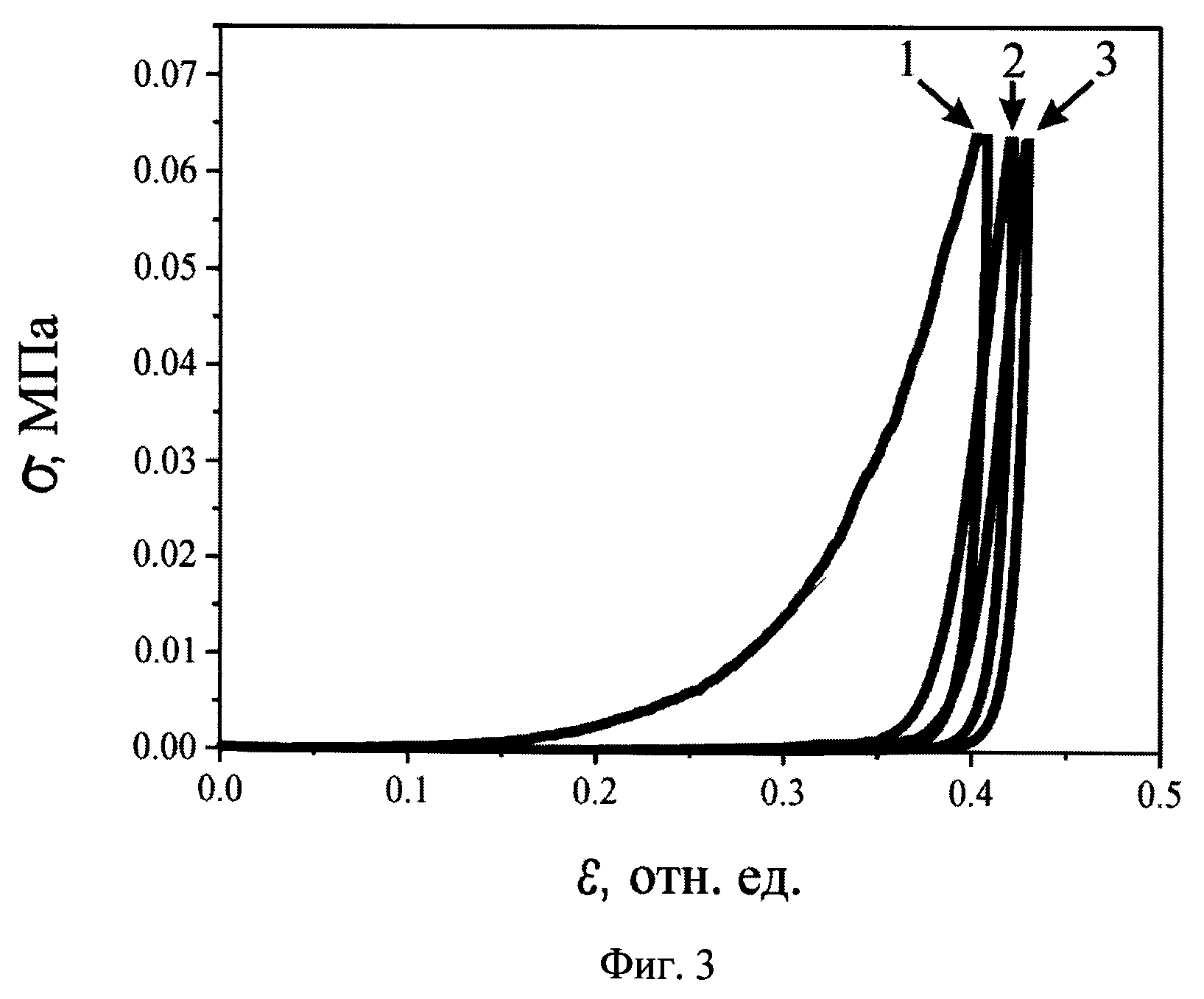
На фиг.4 представлены параметры зависимости нагрузка-деформация УНТ, используемые для характеристики материала.
Прибор для идентификации материала в насыпном виде содержит измерительно-силовую головку 1 с подвешенным в ней на плоских пружинах цилиндрическим штоком с плоским торцом 2, под которым установлена ячейка 3 с образцом в виде наноматериала в насыпном виде 4, закрепленная на основании в виде платформы 5. Измерительно-силовая головка 1 электрически соединена через контроллер 6 с персональным компьютером 7 и также установлена на основании в виде платформы 5 соосно с ячейкой 3. Измерительно-силовая головка 1 содержит микронагружающее устройство 8, прецизионный оптический датчик измерения локальных деформаций 9 и лазер 10.
Прибор работает следующим образом.
В ячейку 3 загружается исследуемый материал 4 в насыпом виде, например углеродные нанотрубки (УНТ). По программам нагружения, заложенным в компьютер 7, контроллер 6 выдает команды измерительно-силовой головке 1, которая подводит цилиндрический шток 2 своим плоским торцом к поверхности исследуемого материала 4 и подвергает его воздействию микронагружающим устройством 8 нарастающей нагрузкой, например, в диапазоне значений от 0 до 500 мН. Воздействие приложенной силы на материал 4 отслеживается прецизионным оптическим датчиком измерения локальных деформаций 9 и измерителем электрического сопротивления ячейки с образцом. Полученная информация обрабатывается персональным компьютером 7 и из зависимости абсолютной деформации h и электрического сопротивления R от приложенной силы Р строится зависимость напряжения σ от относительной деформации ε, которую обычно используют при механических испытаниях, и удельной проводимости γ. Полученные данные сопоставляются с данными банка данных, имеющихся в персональном компьютере 7, что позволяет провести идентификацию материала.
Предлагаемый способ и прибор для идентификации материала в насыпном виде обладают высокой разрешающей способностью и обеспечивают идентификацию наноматериалов в насыпном виде и экспресс-контроль микромеханических, реологических и микроэлектромеханических характеристик продукции.
Реактор для получения углеродных наноматериалов
Способ получения объемного наноструктурированного материала
Способ получения металлоксидных катализаторов для выращивания углеродных нанотрубок из газовой фазы
Способ приготовления электролита для получения композиционных покрытий на основе металлов
Способ получения гибких композиционных сорбционно-активных материалов
Способ получения углеродных наноматериалов
Наномодификатор строительных материалов и способ его получения
Способ корректировки наномодифицированного электролита
Способ изготовления химического адсорбента диоксида углерода
Способ получения углеродных наноматериалов
Способ получения объемного наноструктурированного материала
Способ получения гибких композиционных сорбционно-активных материалов
Способ изготовления химического адсорбента диоксида углерода
Многофункциональная добавка к автомобильному бензину и содержащая ее топливная композиция
Способ диспергирования наночастиц в эпоксидной смоле
Электротеплоаккумулирующий нагреватель
Способ управления биохимическими реакциями
Способ функционализации углеродных наноматериалов
Дисперсия углеродных нанотрубок
Способ получения платинусодержащих катализаторов на наноуглеродных носителях

