Результат интеллектуальной деятельности: Способ создания подвижного соединения твердых тел
Вид РИД
Изобретение
Изобретение относится к прикладной технической механике, главным образом к созданию систем твердых тел с подвижными соединениями, и предназначено, главным образом, для использования при создании пальцеобразных элементов антропоморфных или антропомиметических схватов манипуляторов роботов.
Известны способы соединения цепочек твердых тел, обеспечивающие непрерывный внешний контакт цилиндрических поверхностей смежных твердых тел при их взаимных перемещениях, и использующие для этого дополнительные элементы, соединяющие смежные твердые тела. Такие соединения позволяют заменить скольжение контактирующих цилиндрических поверхностей при взаимном смещении смежных тел подвижного соединения с внутренним контактом на качение цилиндрических поверхностей смежных тел соединения с внешним контактом.
Аналогами изобретения являются изобретения по патенту RU №2544463 «Цепь с открытыми шарнирами» (ml), и по патенту №2450184 (www.findpatent.ru/patent/245/2450184.html) «Приводная роликовая цепь с шарнирами качения».
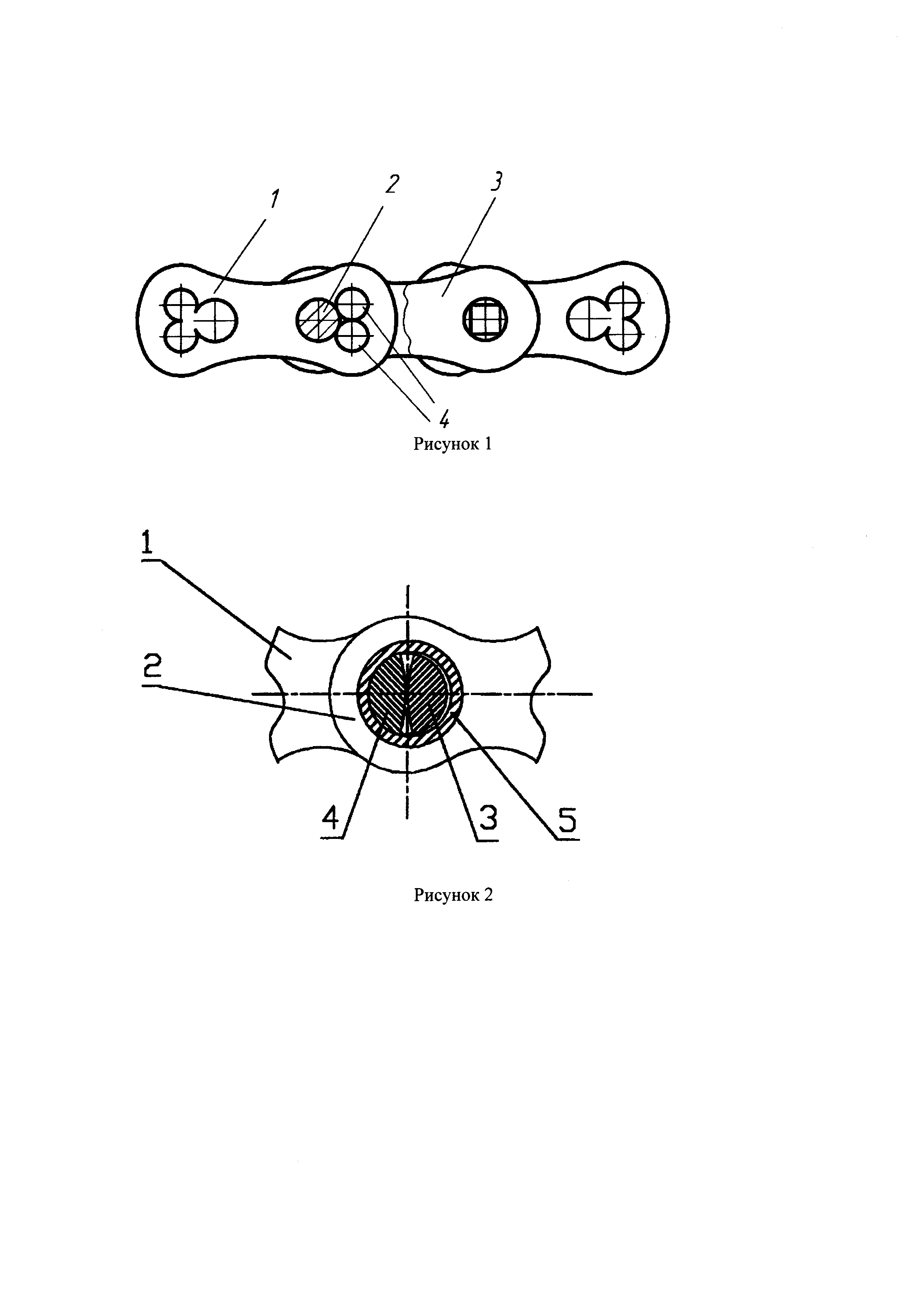
В изобретении «Цепь с открытыми шарнирами» цепь содержит наружные и внутренние пластины и неподвижно установленные в наружных и подвижно во внутренних пластинах валики, а также дополнительно установленные во внутренних пластинах опирающиеся друг на друга и контактирующие с соответствующими валиками цилиндрические вставки. Задачей данного изобретения является повышение надежности цепи вследствие частичного замещения трения скольжения внутреннего контакта обычных пластинчатых роликовых цепей на трение качения валиков одного звена цепи по цилиндрическим вставкам смежного звена цепи. Дополнительными элементами, соединяющими звенья цепи, являются валики и контактирующие с валиками цилиндрические вставки (Рисунок 1).
На рисунке изображены: 1 - наружная пластина; 2 - валик; 3 - внутренняя пластина; 4 - цилиндрические вставки.
В изобретении «Приводная роликовая цепь с шарнирами качения» конструкция характеризуется тем, что она является качательно-шарнирной роликовой цепью содержащей шарнирно соединенные между собой последовательно чередующиеся жесткие наружные и жесткие внутренние звенья, каждое из которых имеет две, расставленных с промежутком, продольные боковые пластины, в отверстиях в которых на плотной посадке закрепляются сегментные валики («призмы» по определению авторов)с различными радиусами кривизны поверхностей так, что они опираются друг на друга цилиндрическими поверхностями большего радиуса, а цилиндрическими поверхностями меньшего радиуса, соответственно, опираются один валик на отверстия в пластинах внутренних звеньев, а другой валик на отверстия в пластинах наружных звеньев (Рисунок 2). Сегментные валики являются основными силовыми элементами конструкции соединения.
На рисунке изображены: 1- внутренняя пластина; 2 - внешняя пластина; 3 и 4 -подвижный и неподвижный сегментные валики-призмы; 5 - свободно вращающаяся обойма, прикрывающая открытый шарнир от попадания посторонних предметов.
Технический результат заявляемого изобретения заключается в увеличении допустимого угла относительного поворота смежных звеньев путем создания возможности такого взаимодействия сил в цепном шарнире (шарнирном соединении) цепи, при котором обеспечиваются взаимное расположение и взаимные относительные перемещения его элементов, соответствующие меньшему крутящему моменту в шарнире цепи при «качательных» взаимных смещениях звеньев на небольшие углы.
Ближайшим аналогом изобретения является изобретение «Приводная роликовая цепь с шарнирами качения».
Недостатками данного изобретения являются ограниченный угол относительного качания-отклонения смежных звеньев, сложность конструкции соединения и низкие силомоментные характеристики взаимодействия приведенных звеньев при использовании конструкции для соединения фаланг пальцеподобных элементов антропоморфных или антропометрических схватов манипуляторов роботов.
Задачей изобретения является увеличение угла взаимного отклонения смежных звеньев цепи, упрощение конструкции шарнирного соединения и повышение силомоментных характеристик взаимодействия приведенных звеньев.
Задача решается тем, что подвижное соединение смежных твердых тел выполняют не посредством оси цилиндрического шарнира, а посредством замка с двумя осями-пинами и соединяющей их щечки, а контактирующие опорные поверхности смежных звеньев выполняют цилиндрическими с канавкой/гребнем и зубчатыми венцами по краям.
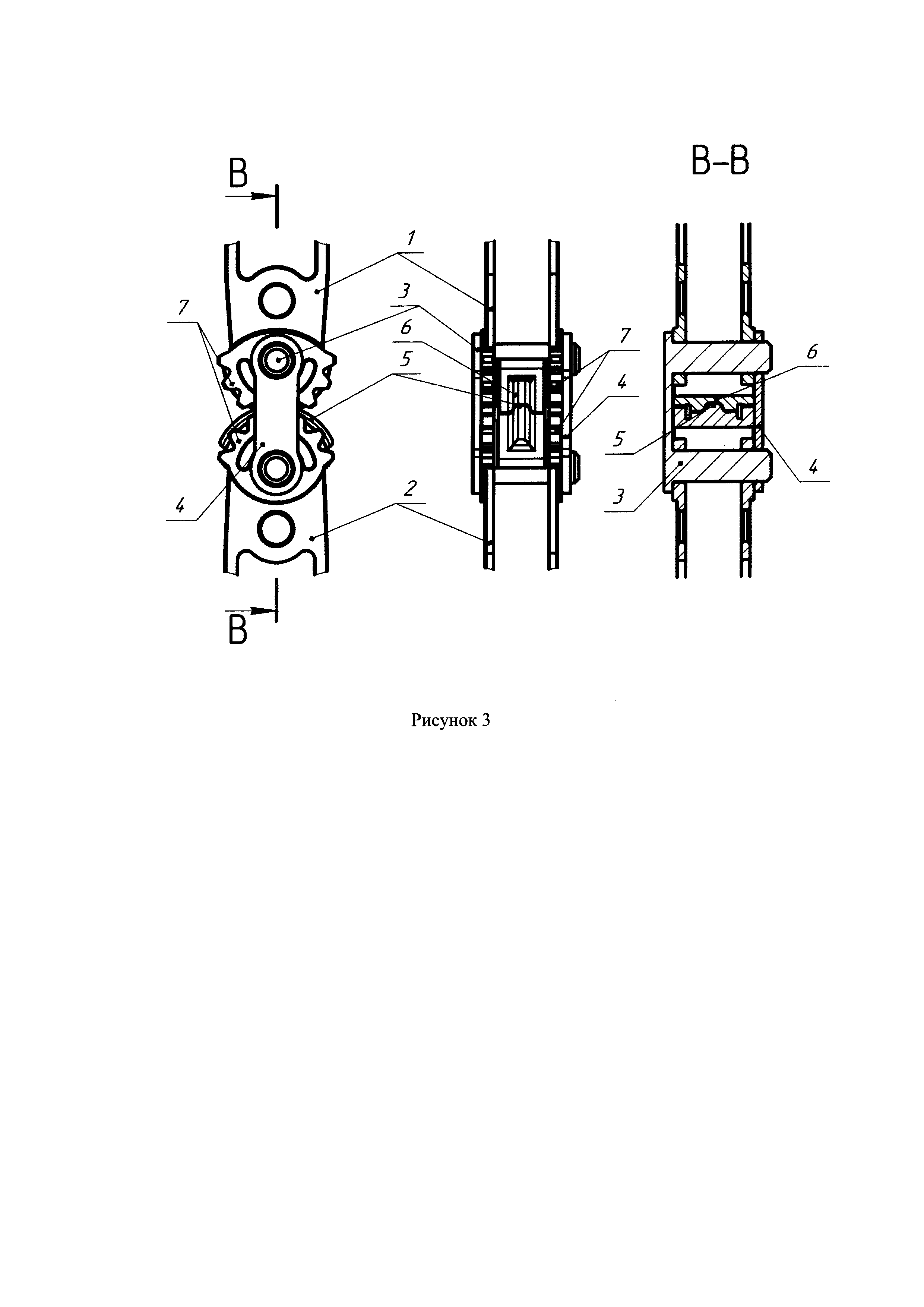
Конструкция подвижного соединения представлена на Рисунке 3:1 - вид сбоку; II - вид сверху и III - разрез по плоскости, проходящей через оси пинов.
На рисунке изображены: 1 - звено «1»); 2 - звено «2»); 3 - оси-пины замка; 4 -соединяющая пины щечка; 5 - гребень на цилиндрической контактной поверхности одного звена; 6 - канавка на цилиндрической контактной поверхности смежного звена; 7 - зубчатые венцы по краям контактных поверхностей звеньев.
Новое подвижное соединение обеспечивает сложную кинематическую характеристику относительного перемещения звеньев. В частности, при смещении звена «1» относительно смежного звена «2» звено «1» совершает эпициклоидальное перемещение по цилиндрической контактной поверхности смежного звена «2». Зубчатые венцы звеньев обеспечивают взаимно однозначное относительное положение звеньев при повторениях их относительных смещений. Угол относительного отклонения положения звеньев может достигать 180 градусов в обе стороны.
При использовании для соединения фаланг пальцеподобных элементов антропоморфных или антропомиметических схватов манипуляторов роботов новое подвижное соединение звеньев цепочек твердых тел обеспечивает высокую степень деформации кинематической цепи фаланг.
Способ подвижного соединения цепочек твердых тел, обеспечивающий непрерывный внешний контакт цилиндрических поверхностей смежных твердых тел при их взаимных перемещениях и использующий дополнительные элементы, соединяющие смежные твердые тела, отличающийся тем, что подвижное соединение смежных твердых тел выполняют посредством замка с двумя осями-пинами и соединяющей их щечки, а контактирующие опорные поверхности смежных звеньев выполняют цилиндрическими с канавкой/гребнем и зубчатыми венцами по краям.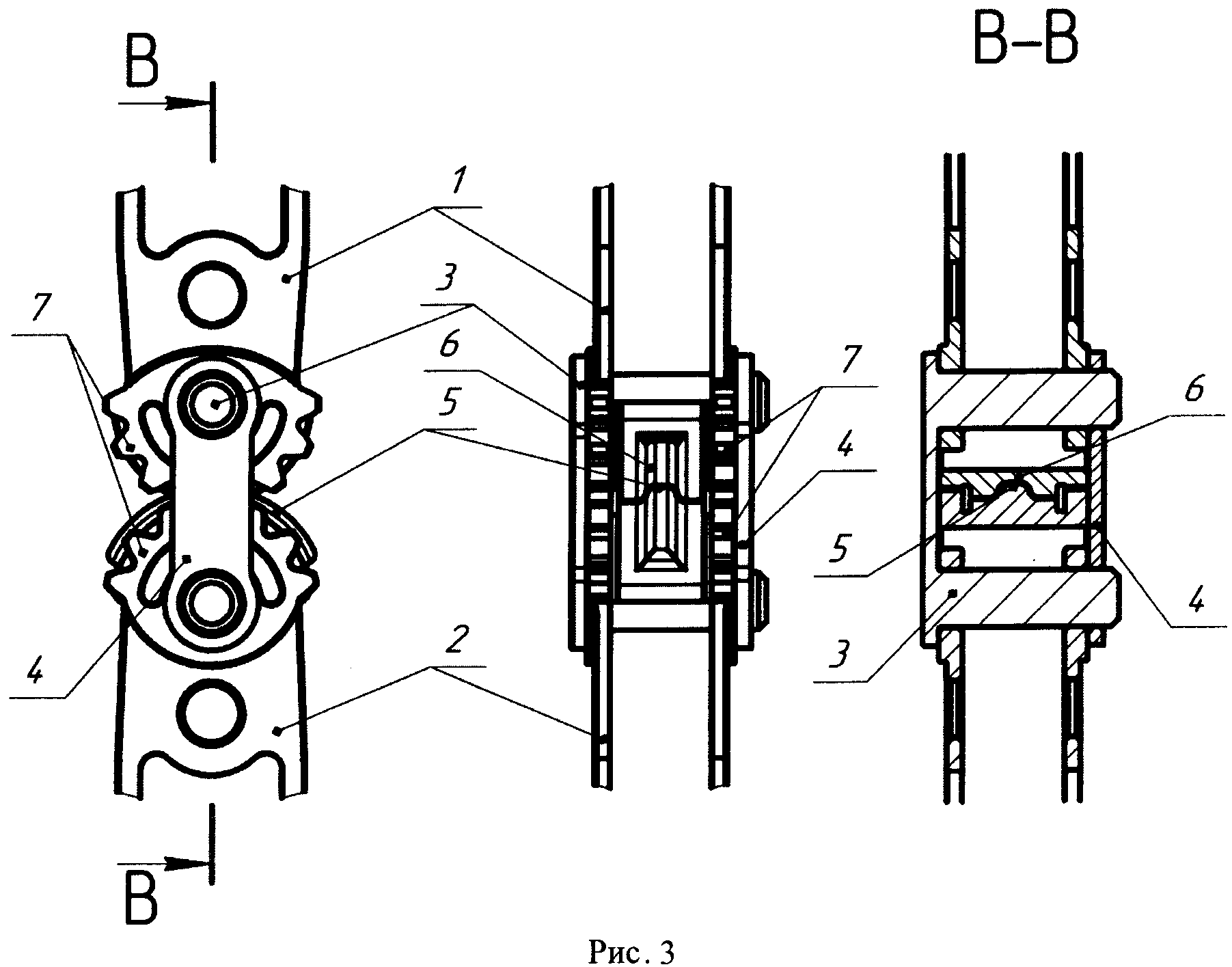
Рычажно-полиспастный привод шарниров манипуляторов
Агрегат для перемещения лежачих больных - больничный робот
Сельскохозяйственный робот-комбайн
Рычажно-полиспастный привод шарниров манипуляторов

